线性多步法2
- 格式:ppt
- 大小:958.00 KB
- 文档页数:27
多步法应用于常微分方程的数值解。
从概念上讲,数值方法从初始点开始,然后在时间上向前迈出一小步,以找到下一个求解点。
该过程的下一步是绘制解决方案。
一步法(例如Euler方法)仅引用前一点及其导数来确定当前值。
诸如Runge Kutta之类的方法采取一些中间步骤(例如,半个步骤)来获得高阶方法,但是在进行第二步之前会丢弃所有先前的信息。
多步尝试通过保留和使用先前步骤中的信息而不是丢弃信息来提高效率。
因此,多步法涉及前几个要点和导数。
在多步的情况下,使用先前点和导数的线性组合。
简单的介绍多步法应用于常微分方程的数值解。
从概念上讲,数值方法从初始点开始,然后在时间上向前迈出一小步,以找到下一个求解点。
该过程的下一步是绘制解决方案。
一步法(例如Euler方法)仅引用前一点及其导数来确定当前值。
诸如Runge Kutta之类的方法采取一些中间步骤(例如,半个步骤)来获得高阶方法,但是在进行第二步之前会丢弃所有先前的信息。
多步尝试通过保留和使用先前步骤中的信息而不是丢弃信息来提高效率。
因此,多步法涉及前几个要点和导数。
在多步的情况下,使用先前点和导数的线性组合。
[1-3]具体定义常微分方程的数值方法近似地解决了形式初值问题结果是离散时间的Ti的Y(T)的近似值其中h是时间步长,而I是整数。
Multistep使用上一步中的信息来计算下一个值。
特别地,多步法使用Yi和f(Ti,Yi)来计算所需当前步长的Y值。
因此,多步方法是以下形式的方法:确定系数AI和Bi。
该方法的设计者选择系数平衡了对实际解决方案的需求,以便获得一种易于使用的方法。
通常,许多系数为零以简化该方法。
显式和隐式方法可以区分。
如果Bi = 0,则该方法称为“显式”,因为它可以直接计算yn + s。
如果Bi≠0,则该方法称为“隐式”,因为YN + s的值取决于f(TN + s,yn + s),并且必须为yn + s。
迭代方法(例如牛顿法)通常用于求解隐式公式。

常微分方程数值解的多步法。
从概念上讲,一种数值方法是从一个初始点开始的,然后在时间上向前迈出一小步,以找到下一个求解点。
以下过程绘制解决方案。
单步方法(例如欧拉方法)仅参考前一点及其导数来确定当前值。
诸如Runge-Kutta之类的方法采取了一些中间步骤(例如,半步骤)来获得高阶方法,但是在进行第二步之前会丢弃所有先前的信息。
多步方法试图通过保留和使用先前步骤的信息而不是丢弃信息来提高效率。
因此,多步法是指前几个点和导数值。
在多步法的情况下,使用先前点和导数值的线性组合。
常微分方程数值解的多步法。
从概念上讲,一种数值方法是从一个初始点开始的,然后在时间上向前迈出一小步,以找到下一个求解点。
以下过程绘制解决方案。
单步方法(例如欧拉方法)仅参考前一点及其导数来确定当前值。
诸如Runge-Kutta之类的方法采取了一些中间步骤(例如,半步骤)来获得高阶方法,但是在进行第二步之前会丢弃所有先前的信息。
多步方法试图通过保留和使用先前步骤的信息而不是丢弃信息来提高效率。
因此,多步法是指前几个点和导数值。
在多步法的情况下,使用先前点和导数值的线性组合。
具体定义常微分方程的数值方法近似地解决了形式初值的问题结果是离散时间ti处y(t)的近似值:其中h是时间步长,而i是整数。
多步方法使用上一个S步骤的信息来计算下一个值。
特别地,多步方法使用yi和f(ti,yi)来计算当前步骤所需的y值。
因此,多步方法是一种具有以下形式的方法:确定系数ai和bi的方法。
该方法的设计者选择系数来平衡对实际解决方案的需求,从而获得一种易于使用的方法。
通常,许多系数为零以简化方法。
可以区分显式和隐式方法。
如果bi = 0,则此方法称为“显式”,因为此公式可以直接计算yn + s。
如果bi≠0,则此方法称为“隐式”,因为yn + s的值取决于f(tn + s,yn + s),并且必须为yn + s。
迭代方法(例如牛顿法)通常用于求解隐式公式。
第五章 常微分方程的差分方法5.3 线性多步法一、教学目标及基本要求通过对本节课的学习,使学生掌握常微分方程、常微分方程方程组的线性多步法。
二、教学内容及学时分配本节课主要介绍常微分方程的数值解法。
具体内容如下:讲授内容:欧拉公式、改进的欧拉公式。
三、教学重点难点1.教学重点:开型求解公式,闭型求解公式。
2. 教学难点:收敛性与稳定性。
四、教学中应注意的问题多媒体课堂教学为主。
适当提问,加深学生对概念的理解五、正文 线性多步法及其收敛性与稳定性、方程组与高阶方程1 引言 收敛性问题微分方程数值解法的基本思想是:通过某种离散化手段,将微分方程转化为差分方程(代数方程)来求解。
这种转化是否合理,还要看差分问题的解n y ,当0h →时是否会收敛到微分方程的准确解(),n y x 需要注意的是,如果只考虑0h →,那么节点0n x x nh =+对固定的n 将趋向于0x ,这时讨论收敛性是没有意义的,因此,当0h →时,同时n →∞时才合理。
定义:若一种数值方法对于任意固定的0n x x nh =+,当0h →(同时n →∞)时,有(),n n y y x →则称该方法是收敛的。
考察欧拉公式),(1n n n n y x hf y y +=+ (1) 设1+n y 为在)(n n x y y =条件下按欧拉公式计算的结果,))(,()(1n n n n x y x hf x y y +=+ (2)11)(++-n n y x y 即为局部截断误差。
)(2)(''2111ξy h y x y T n n n =-=+++,存在常数C 使211)(Ch y x y n n <-++ (3) 考虑整体截断误差111)(+++-=n n n y x y e (无)(n n x y y =条件),由于111111)()(++++++-+-<-n n n n n n y y y x y y x y (4)(1)-(2)得:由常微分方程李普希兹条件得:))(()1())(()(11n n n n n n n n y x y hL y x y hL y x y y y -+=-+-≤-++ (5)由(3),(4),(5)式得 递推得]1)1[()1(0-+++≤n n n hL L Ch e hL e 又hL e hL ≤+1,设T nh x x n ≤=-0(T 为定数),则 故h e L C e e e TL TL n )1(0-+≤若初值准确,则0→h 时0→n e ,欧拉公式是收敛的。

第一章绪论1.1 引言常微分方程是现代数学的一个重要分支,是人们解决各种实际问题的有效工具。
微分方程的理论和方法从17世纪末开始发展起来,很快成了研究自然现象的强有力工具,在17到18世纪,在力学、天文、科学技术、物理中,就已借助微分方程取得了巨大的成就。
1864年Leverrer根据这个方程预见了海王星的存在,并确定出海王星在天空中的位置。
现在,常微分方程在许多方面获得了日新月异的应用。
这些应用也为常微分方程的进一步发展提供了新的问题,促使人们对微分方程进行更深入的研究,以便适应科学技术飞速发展的需要。
研究常微分方程常用数值解是数学工作者的一项基本的且重要的工作。
在国内外众多数学家的不懈努力,使此学科基本上形成了一套完美的体系。
微分方程的首要问题是如何求一个给定方程的通解或特解。
到目前为止,人们已经对许多微分方程得出了求解的一般方法。
由于在生产实际和科学研究中所遇到的微分方程问题比较复杂,使这些问题的解即使能求出解析表达式,也往往因计算量太大而难于求出,而对于一些典型的微分方程则可以运用基本方法求出其解析解,并可以根据初值问题的条件把其中的任意常数确定下来。
由于求通解存在许多困难,人们就开始研究带某种定解条件的特解。
首先是Cauchy对微分方程初始解的存在惟一性进行了研究。
目前解的存在惟一性、延拓性、大范围的存在性以及解对初始解和参数的延续性和可微性等理论问题都已发展成熟。
与此同时,人们开始采取各种近似方法来求微分方程的特解,例如求微分方程数值解的Euler折线法、Runge-Kutta法等,可以求得若干个点上微分方程的近似解。
最后,由于当代高科技的发展为数学的广泛应用和深入研究提供了更好的手段。
用计算机结合Matlab软件求方程的精确解、近似解,对解的性态进行图示和定性、稳定性研究都十分方便有效。
本章先介绍常微分的一般概念、导出微分方程的一些典型例子及求解微分方程的思路分析。
从而得到常微分方程的常用数值解法。
亚当姆斯法:
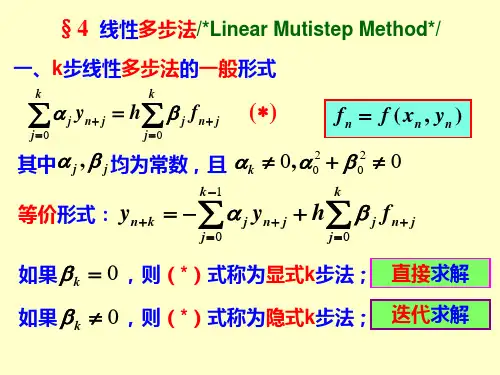
线性多步法:在利用多步法求yn+1时,必须已知除yn外前几步的值,例如:yn,yn-1,……,yn-k+1,称为K步法。
多步法不能自己起步,在使用其他方法求出y1,y2,yk-1后才能用其求解,常用的亚当姆斯方法的形式为:
通常用迭代方法求解隐式方程,隐式增加了计算量,但稳定域大于显示公式,而且对于同阶次的亚当姆斯方法,隐式公式的精度往往要大于显示公式,所以往往采用折中的办法,即; 先用显式公式求出yn+1的预估值,再带入隐式公式求出yn+1的值,因此成为预估校正法,下面是四阶预估校正公式:。