基于各点异性理论的椭圆拟合算法
- 格式:pdf
- 大小:1.06 MB
- 文档页数:3
matlab 椭球拟合椭球拟合是一种在三维空间内找到最符合一组点集的椭球的方法。
在基于三维点云数据进行建模和分析的应用中,经常需要对点云数据进行拟合和分析,而椭球拟合常常被用来处理这些数据。
在 Matlab 中,可以通过使用“fitellipsoid”函数实现椭球拟合。
fitellipsoid 函数可以根据一组三维点云数据拟合出一个椭球,并返回椭球的中心点、主轴长度、旋转矩阵等信息。
函数的用法如下:[center,radii,eigenvecs] = fitellipsoid(X)其中,X是一个n行3列的矩阵,表示n个三维点云的坐标。
fitellipsoid 函数将返回一个包含椭球中心点、主轴长度和旋转矩阵的结构体。
其中,center是椭球的中心点,radii是椭球的主轴长度,eigenvecs是椭球的旋转矩阵。
椭球拟合的计算方法:在椭球拟合中,首先需要计算点云数据的协方差矩阵C。
协方差矩阵C可以通过以下公式计算:C = X' * X / n其中,X'表示X的转置,n为样本数量。
接下来,需要对协方差矩阵C进行特征值分解,得到矩阵C的特征向量和特征值。
特征向量代表了C的主轴方向,特征值代表了椭球沿着主轴方向的长度。
计算特征值分解的方法可以使用Matlab中的“eig”函数,即:[V, D] = eig(C)其中,V是C的特征向量矩阵,D是C的特征值矩阵。
根据特征向量和特征值,可以计算出椭球的中心点和主轴长度。
假设椭球的中心点为p,特征向量为v1、v2、v3,特征值为λ1、λ2、λ3,则可以通过以下公式计算出椭球的中心点和主轴长度:p = mean(X)radii = sqrt(5*λ)其中,mean(X)是X矩阵每列的均值,即椭球的中心点。
最后,还需要在旋转矩阵中确定椭球的方向。
根据特征向量的定义,可以将椭球沿着我们感兴趣的主轴方向旋转,而将其它两个方向的变化最小化。
Matlab中如果要将向量V1~3的长度限制为1,需要使用的函数是normc(V)。
cv椭圆拟合算法摘要:一、椭圆拟合算法简介二、MATLAB中椭圆拟合的具体实现1.椭圆拟合函数2.参数设置与优化3.示例与分析三、椭圆拟合算法的应用领域四、总结与展望正文:一、椭圆拟合算法简介椭圆拟合算法是一种广泛应用于图像处理、物理实验和工程测量等领域的非线性拟合方法。
它的基本目标是通过一定的数学模型,将实验或测量得到的一组数据映射到椭圆曲线上,从而得到椭圆的参数,如长轴、短轴、中心坐标等。
椭圆拟合算法有多种方法,如最小二乘法、Levenberg-Marquardt算法等。
二、MATLAB中椭圆拟合的具体实现1.椭圆拟合函数在MATLAB中,可以使用curve fitting工具箱进行椭圆拟合。
常用的椭圆拟合函数为:`fit`。
该函数可以实现非线性拟合,支持输入数据为坐标矩阵的形式。
2.参数设置与优化在进行椭圆拟合时,需要设置一些参数以优化拟合效果。
这些参数包括:- 拟合函数:设置为椭圆方程,如`ax^2 + by^2 + cx + dy + e = 0`;- 初始参数:设置椭圆的初始参数,如长轴、短轴、中心坐标等;- 拟合方法:选择拟合算法,如最小二乘法、Levenberg-Marquardt算法等;- 迭代次数:设置迭代次数,影响拟合速度和精度;- 误差容限:设置误差容限,影响拟合结果的可靠性。
3.示例与分析以下为一个简单的椭圆拟合示例:```matlab% 生成模拟数据x = 1:10;y = 2 + 3 * x + 0.1 * sqrt(x);% 进行椭圆拟合fit = fit(x, y, "a*x^2 + b*y^2 + c*x + d*y + e", "a", "b", "c", "d", "e");% 显示拟合结果disp(fit);```通过调整参数和迭代次数,可以得到较好的椭圆拟合结果。
cv椭圆拟合算法摘要:1.椭圆拟合算法概述2.CV 椭圆拟合算法的原理3.CV 椭圆拟合算法的应用实例4.CV 椭圆拟合算法的优缺点正文:1.椭圆拟合算法概述椭圆拟合算法是一种在计算机视觉中广泛应用的算法,主要用于处理图像中的椭圆形状。
椭圆形状在自然界和人工制品中都有广泛的存在,例如,眼睛、车轮、卫星轨道等。
椭圆拟合算法的目的是通过图像中椭圆形状的特征点,对椭圆进行参数化表示,从而实现对图像的精确描述和分析。
2.CV 椭圆拟合算法的原理CV 椭圆拟合算法,即在OpenCV 库中实现的椭圆拟合算法,主要基于最小二乘法原理。
最小二乘法是一种数学优化技术,其基本思想是通过最小化误差的平方和来寻找最佳拟合函数。
在椭圆拟合中,最小二乘法用于寻找最佳的椭圆参数,即长轴、短轴和旋转角度等。
具体来说,CV 椭圆拟合算法通过计算图像中椭圆形状上特征点的误差平方和,来优化椭圆参数,使其最小化。
为了提高算法的稳定性和精度,通常需要在计算过程中加入一定的权重,以平衡不同特征点的影响。
3.CV 椭圆拟合算法的应用实例CV 椭圆拟合算法在计算机视觉领域有广泛的应用,例如:(1)图像处理:在图像中检测和分析椭圆形状,可以应用于目标识别、图像分割等任务。
(2)物体跟踪:通过对运动物体的椭圆形状进行拟合,可以实现对物体的运动轨迹跟踪。
(3)人脸识别:在人脸识别中,眼睛的椭圆形状是一个重要的特征。
通过对眼睛的椭圆形状进行拟合,可以提取出特征点,用于人脸识别和比对。
4.CV 椭圆拟合算法的优缺点CV 椭圆拟合算法具有以下优缺点:(1)优点:- 算法简单,易于实现,计算复杂度较低。
- 对椭圆形状的拟合精度较高,适用于多种场景。
- 可以灵活地调整拟合参数,以适应不同图像特征。
(2)缺点:- 对噪声敏感,当图像质量较差时,拟合精度可能受到影响。
- 在处理复杂背景和多目标情况下,可能存在误检和漏检等问题。
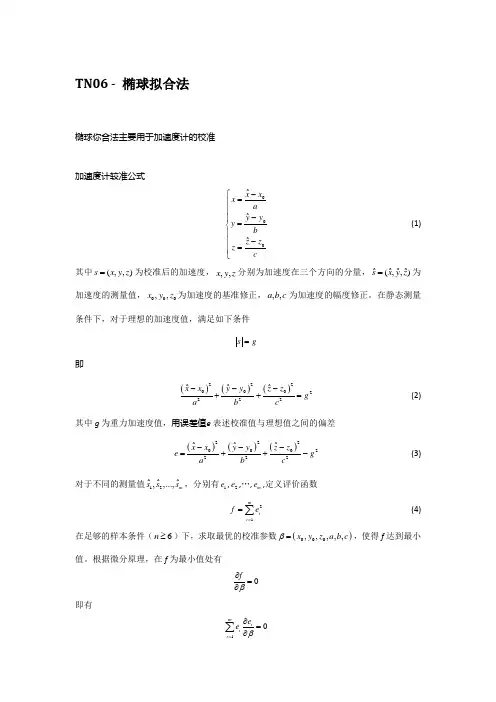
TN06 - 椭球拟合法椭球你合法主要用于加速度计的校准加速度计较准公式000ˆˆˆx x x a y y y b z z z c-⎧=⎪⎪-⎪=⎨⎪-⎪=⎪⎩(1)其中(,,)s x y z =为校准后的加速度,,,x y z 分别为加速度在三个方向的分量,ˆˆˆˆ(,,)sx y z =为加速度的测量值,000,,x y z 为加速度的基准修正,,,a b c 为加速度的幅度修正。
在静态测量条件下,对于理想的加速度值,满足如下条件 s g =即()()()2220002222ˆˆˆx x yy z z g abc---++= (2)其中g 为重力加速度值,用误差值e 表述校准值与理想值之间的偏差()()()2220002222ˆˆˆxx y y z z e g abc---=++- (3)对于不同的测量值12ˆˆˆ,,...,m ss s ,分别有1e ,2e ,…,m e ,定义评价函数21mi i f e ==∑(4)在足够的样本条件(6n ≥)下,求取最优的校准参数()000,,,,,x y z a b c β=,使得f 达到最小值。
根据微分原理,在f 为最小值处有 0fβ∂=∂ 即有10miii e e β=∂=∂∑如果(1)式采用更一般的方式如下ˆˆˆx ax b y cy d z ez f =+⎧⎪=+⎨⎪=+⎩(5)则有 ()()()22220ˆˆˆe axb cy d ez fz g =+++++-(6)()()()()()()()ˆˆˆˆˆˆˆˆˆ222222eaxb x ax b cy d y cyd ez f z ez f β∂=++++++∂(7)梯度下降法1i i f ββγβ+∂=-∂(8) 即可达到使f 达到最小值的β值高斯牛顿法 泰勒级数展开 221()()2T f f f f ββββββββ∂∂+∆≈+∆+∆∆∂∂(9)令111122221212n n m m m n e e e e e e e J e e e ββββββββββ∂∂∂⎡⎤⎢⎥∂∂∂⎢⎥⎢⎥∂∂∂∂⎢⎥∂∂∂==⎢⎥∂⎢⎥⎢⎥∂∂∂⎢⎥⎢⎥∂∂∂⎣⎦(10)其中e 和β表示误差和参数矢量 [][]1212,,,,,,T m Tn e e e e ββββ== (11)()222kT k k e e f e e J βββ∂∂∂⎡⎤===⎣⎦∂∂∂∑∑ (12)2222T T f e J f J J ββββ⎛⎫∂∂ ⎪⎡⎤∂∂∂⎝⎭⎣⎦==≈∂∂∂(13)这样式(9)可以表述为()()2T T T f f e J J J ββββββ+∆≈+∆+∆∆(14)根据上式,使得()f ββ+∆取得最小的β∆为 1T TJ J J eβ-⎡⎤∆=-⎣⎦(15)此时()()T f f e eβββ+∆≈-(16)最小二乘法 (3)式展开()()()22200022222222222000000222222222ˆˆˆ222111ˆˆˆˆˆˆx x y y z z e g ab cx y z x y z x x y y z z g a a b b c c a b c---=++-=-+-+-+++-(17)为便于处理,上式可表述为 222ˆˆˆˆˆˆe axbx cy dy ez fz g =++++++(18)其中,,,a b g 为新的参数名称,分别对应(17)中的参数如下2202202202222000222121212a a b x a c b d y b e c f z c x y z g g a b c ←−→←−→-←−→←−→-←−→←−→-←−→++-(19)只要求出最优的新的,,,a b g 的值,即可获得(3)式所表述的000,,,,,x y z a b c 等参数。
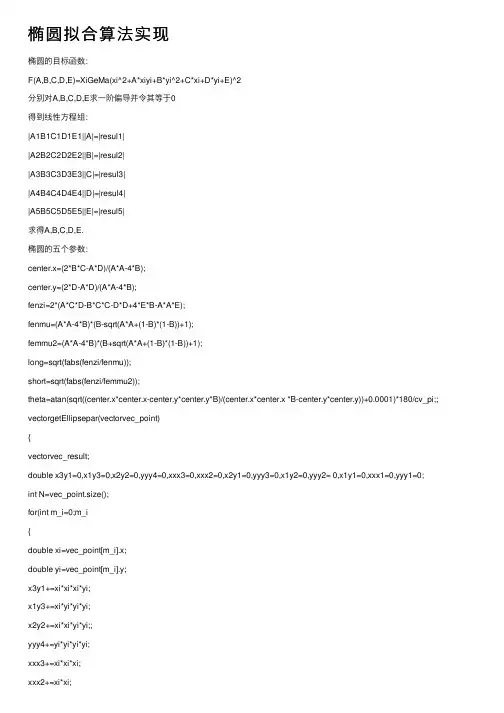
椭圆拟合算法实现椭圆的⽬标函数:F(A,B,C,D,E)=XiGeMa(xi^2+A*xiyi+B*yi^2+C*xi+D*yi+E)^2分别对A,B,C,D,E求⼀阶偏导并令其等于0得到线性⽅程组:|A1B1C1D1E1||A|=|resul1||A2B2C2D2E2||B|=|resul2||A3B3C3D3E3||C|=|resul3||A4B4C4D4E4||D|=|resul4||A5B5C5D5E5||E|=|resul5|求得A,B,C,D,E.椭圆的五个参数:center.x=(2*B*C-A*D)/(A*A-4*B);center.y=(2*D-A*D)/(A*A-4*B);fenzi=2*(A*C*D-B*C*C-D*D+4*E*B-A*A*E);fenmu=(A*A-4*B)*(B-sqrt(A*A+(1-B)*(1-B))+1);femmu2=(A*A-4*B)*(B+sqrt(A*A+(1-B)*(1-B))+1);long=sqrt(fabs(fenzi/fenmu));short=sqrt(fabs(fenzi/femmu2));theta=atan(sqrt((center.x*center.x-center.y*center.y*B)/(center.x*center.x *B-center.y*center.y))+0.0001)*180/cv_pi;; vectorgetEllipsepar(vectorvec_point){vectorvec_result;double x3y1=0,x1y3=0,x2y2=0,yyy4=0,xxx3=0,xxx2=0,x2y1=0,yyy3=0,x1y2=0,yyy2= 0,x1y1=0,xxx1=0,yyy1=0;int N=vec_point.size();for(int m_i=0;m_i{double xi=vec_point[m_i].x;double yi=vec_point[m_i].y;x3y1+=xi*xi*xi*yi;x1y3+=xi*yi*yi*yi;x2y2+=xi*xi*yi*yi;;yyy4+=yi*yi*yi*yi;xxx3+=xi*xi*xi;xxx2+=xi*xi;x2y1+=xi*xi*yi;x1y2+=xi*yi*yi;yyy2+=yi*yi;x1y1+=xi*yi;xxx1+=xi;yyy1+=yi;yyy3+=yi*yi*yi;}long double resul1=-(x3y1);long double resul2=-(x2y2);long double resul3=-(xxx3);long double resul4=-(x2y1);long double resul5=-(xxx2);long double B1=x1y3,C1=x2y1,D1=x1y2,E1=x1y1,A1=x2y2; long double B2=yyy4,C2=x1y2,D2=yyy3,E2=yyy2,A2=x1y3; long double B3=x1y2,C3=xxx2,D3=x1y1,E3=xxx1,A3=x2y1; long double B4=yyy3,C4=x1y1,D4=yyy2,E4=yyy1,A4=x1y2; long double B5=yyy2,C5=xxx1,D5=yyy1,E5=N,A5=x1y1; // CvMat*Ma=cvCreateMat(5,5,CV_64FC1);CvMat*Md=cvCreateMat(5,1,CV_64FC1);CvMat*Mb=cvCreateMat(5,1,CV_64FC1);//cvmSet(Mb,0,0,resul1);cvmSet(Mb,1,0,resul2);cvmSet(Mb,2,0,resul3);cvmSet(Mb,3,0,resul4);cvmSet(Mb,4,0,resul5);cvmSet(Ma,0,0,A1);cvmSet(Ma,0,1,B1);cvmSet(Ma,0,2,C1);cvmSet(Ma,0,3,D1);cvmSet(Ma,0,4,E1);cvmSet(Ma,1,0,A2);cvmSet(Ma,1,1,B2);cvmSet(Ma,1,2,C2);cvmSet(Ma,1,3,D2);cvmSet(Ma,1,4,E2);cvmSet(Ma,2,0,A3);cvmSet(Ma,2,1,B3);cvmSet(Ma,2,2,C3);cvmSet(Ma,2,3,D3);cvmSet(Ma,2,4,E3);cvmSet(Ma,3,0,A4);cvmSet(Ma,3,1,B4);cvmSet(Ma,3,2,C4);cvmSet(Ma,3,3,D4);cvmSet(Ma,3,4,E4);cvmSet(Ma,4,0,A5);cvmSet(Ma,4,1,B5);cvmSet(Ma,4,2,C5);cvmSet(Ma,4,3,D5);cvmSet(Ma,4,4,E5);cvSolve(Ma,Mb,Md);long double A=cvmGet(Md,0,0);long double B=cvmGet(Md,1,0);long double C=cvmGet(Md,2,0);long double D=cvmGet(Md,3,0);long double E=cvmGet(Md,4,0);double XC=(2*B*C-A*D)/(A*A-4*B);double YC=(2*D-A*D)/(A*A-4*B);long double fenzi=2*(A*C*D-B*C*C-D*D+4*E*B-A*A*E);long double fenmu=(A*A-4*B)*(B-sqrt(A*A+(1-B)*(1-B))+1);long double femmu2=(A*A-4*B)*(B+sqrt(A*A+(1-B)*(1-B))+1);double XA=sqrt(fabs(fenzi/fenmu));double XB=sqrt(fabs(fenzi/femmu2));double Xtheta=atan(sqrt((XA*XA-XB*XB*B)/(XA*XA*B-XB*XB))+0.0001)*180/3.1415926; vec_result.push_back(XC);vec_result.push_back(YC);vec_result.push_back(XA);vec_result.push_back(XB);vec_result.push_back(Xtheta); return vec_result;}。
椭圆拟合 matlab椭圆拟合是一种常见的数学方法,用于找到一条椭圆曲线,以最佳方式拟合给定的数据点集。
这种方法在图像处理、计算机视觉、物体识别等领域具有广泛的应用。
在Matlab中,有多种方法可以实现椭圆拟合,例如最小二乘法、非线性最小二乘法等。
椭圆拟合的基本思想是找到一条椭圆曲线,使得该曲线与给定的数据点集之间的距离最小。
在Matlab中,可以使用曲线拟合工具箱中的函数来实现这个过程。
我们需要将给定的数据点集导入到Matlab中。
可以使用Matlab的文件读取函数来实现这一步骤。
然后,我们可以使用曲线拟合工具箱中的函数来进行椭圆拟合。
这些函数通常会返回一个椭圆的参数向量,包括椭圆的中心坐标、长轴和短轴的长度、以及椭圆的旋转角度。
一旦得到了椭圆的参数向量,我们就可以使用Matlab的绘图函数来绘制拟合的椭圆曲线。
通过调整参数向量中的参数值,我们可以得到不同形状和大小的椭圆曲线。
除了使用曲线拟合工具箱中的函数,我们还可以使用Matlab的优化工具箱中的函数来实现椭圆拟合。
优化工具箱提供了更多的优化算法,可以根据实际情况选择合适的算法来实现椭圆拟合。
椭圆拟合在实际应用中具有广泛的用途。
例如,在图像处理中,椭圆拟合可以用来提取图像中的椭圆形状物体;在计算机视觉中,椭圆拟合可以用来检测和识别物体的形状;在工程测量中,椭圆拟合可以用来拟合测量数据,从而得到更准确的测量结果。
椭圆拟合是一种常用的数学方法,可以用来找到一条椭圆曲线,以最佳方式拟合给定的数据点集。
在Matlab中,有多种方法可以实现椭圆拟合,例如最小二乘法、非线性最小二乘法等。
椭圆拟合在图像处理、计算机视觉、工程测量等领域具有广泛的应用。
通过使用Matlab的曲线拟合工具箱和优化工具箱中的函数,我们可以轻松地实现椭圆拟合,并得到准确的拟合结果。
椭圆拟合算法椭圆拟合算法是一种经典的图像处理算法,用于从一组点中拟合出一条椭圆曲线。
椭圆拟合算法可以应用于许多不同类型的图像处理任务,以及机器视觉领域的许多研究。
本文的目的是介绍椭圆拟合算法的原理和实现方法,并给出实例,以便读者能够更好地理解该算法。
椭圆拟合算法是一种几何学算法,它的主要思想是将一组点根据给定范围内的曲线进行拟合。
由于椭圆曲线具有较好的特征,因此可以将它用于许多图像处理任务,如曲线拟合、曲线拟合和曲线表面重建等。
因此,椭圆拟合算法可以帮助集成系统获得更加准确和可靠的图像信息,以实现更加准确的结果。
椭圆拟合算法的基本原理是根据给定的点集,通过一系列的步骤来求解椭圆拟合算法的参数。
主要步骤包括:首先,确定点集的起始点和终止点;然后,根据给定的弦长度计算点的距离;最后,使用梯度下降算法求解待拟合圆的最优参数。
椭圆拟合算法的实现方法可以分为三种:最小二乘法、梯度下降法和最近点法。
最小二乘法是一种经典的算法,它根据拟合曲线所需要的点,使用最佳拟合方法来计算拟合曲线的参数;而梯度下降法是椭圆拟合算法的常用算法,它根据拟合曲线所需要的点,使用梯度下降算法来计算拟合曲线的参数;最后是最近点法,它根据拟合曲线所需要的点,通过最近点法来计算拟合曲线的参数。
为了演示椭圆拟合算法,我们可以使用Matlab编写程序。
假设我们有一组散点,如图1所示。
我们可以使用算法来拟合这组数据。
下面是使用Matlab编写的程序示例代码:x=[-4 -3 -2 -2 2 3 4];y=[3 2 -1 -2 0 -1 2];[x_curve,y_curve,a,b]=ellipsefit(x,y);plot(x_curve,y_curve)hold onplot(x,y,o其中,变量x和y分别表示点的x坐标和y坐标;函数ellipsefit 用于求解椭圆拟合参数,函数的输入参数为x坐标和y坐标,它的输出参数为拟合椭圆上的点的x坐标和y坐标,以及椭圆拟合参数a和b;最后,函数plot用于在图中画出拟合椭圆,plot(x,y,o用于绘制原始点。
椭圆拟合算法椭圆拟合算法是一种分析数据的方法,可以用来拟合椭圆形的数据集。
这种方法最早是由椭圆拟合算法的发明者爱迪生于1880年发表的,以发明名字著称,这种方法由来已久。
椭圆拟合算法最基本的思想是基于椭圆模型,它可以拟合任何复杂的椭圆状分布,使其表现出来的数据更加易于理解和操作。
例如,椭圆拟合可以用于拟合复杂的曲线,从曲线中检测极致值点,或者从曲线中提取某种特定的数据模式,这些模式有助于确定数据的某种特征。
一般来说,椭圆拟合算法是一个很复杂的算法,它可以拟合出任何复杂的数据,包括线性模型、曲线模型、多元函数等。
对于线性模型来说,可以通过计算两个点的横坐标与纵坐标之间的梯度值来计算模型,然后根据梯度值来确定相应点的位置。
而曲线模型可以通过拟合曲线中的拐点,再加上和这些拐点连接的直线段,来拟合出合适的曲线。
此外,椭圆拟合算法还可以用于非线性模型,比如指数模型、对数模型等,通过拟合曲线上的相应极点来确定模型参数。
另外,椭圆拟合算法还可以用于多元函数拟合,使用多元函数拟合,可以拟合出成环形曲线,而这种曲线可以更好地描述复杂的数据分布特征,也可以用于对复杂数据集进行非线性拟合。
椭圆拟合算法在实际应用中有很多应用,可以说它是一种重要的工具。
例如,可以用椭圆拟合算法来拟合椭圆形的用户行为模式,从而分析某种行为是否为正常行为;可以用椭圆拟合算法来分析股票市场或外汇市场中的数据,以便获得有效的投资决策;可以用椭圆拟合算法来拟合通信协议中的信号波形,以估算信号强度,进而分析通信网络的性能等。
总之,椭圆拟合算法是一种广泛应用的算法,可以用于拟合复杂的数据,提取其中的有用信息,帮助用户分析和研究大量的数据,以求找出一些有用的模式及其应用。
c语言椭球拟合
【原创版】
目录
1.椭球拟合的背景和意义
2.C 语言在椭球拟合中的应用
3.椭球拟合的算法原理
4.C 语言实现椭球拟合的实例分析
5.椭球拟合在实际应用中的价值
正文
一、椭球拟合的背景和意义
椭球拟合是一种数学方法,主要用来处理高维数据的拟合问题。
在实际应用中,数据通常呈现出复杂的非线性关系,而椭球拟合可以较好地处理这类问题。
C 语言作为一种广泛应用的编程语言,具有性能优越、跨平台等优点,因此在椭球拟合算法的实现中具有重要价值。
二、C 语言在椭球拟合中的应用
C 语言在椭球拟合中的应用主要体现在以下几个方面:
1.算法实现:C 语言可以用来编写椭球拟合算法,实现对高维数据的拟合处理。
2.性能优化:C 语言具有较高的运行效率,可以对椭球拟合算法进行性能优化,提高算法的运算速度。
3.跨平台兼容:C 语言编写的椭球拟合程序可以在多种操作系统和硬件平台上运行,具有较好的通用性。
三、椭球拟合的算法原理
椭球拟合是一种基于最小二乘法的拟合方法,其基本原理是寻找一个
椭球,使得该椭球与给定数据点的距离之和最小。
具体算法步骤如下:
1.设定初始椭球参数:设置初始椭球中心和半轴长度。
2.计算距离:计算数据点到椭球中心的距离。
3.优化椭球参数:通过最小化距离之和,更新椭球参数。
4.判断收敛:当椭球参数变化小于预设阈值或达到迭代次数限制时,停止迭代,输出当前椭球参数作为拟合结果。
5.如果没有收敛,则返回步骤 2,继续迭代。
Python椭圆拟合在科学计算和图像处理中,拟合椭圆是一项常见的任务。
通过将一组离散的点拟合成一个椭圆,我们可以从实验数据中提取有关对象形状和性质的有用信息。
Python 提供了多种方法来实现椭圆拟合,本文将介绍其中一种常用的方法。
1. 拟合算法原理1.1 椭圆方程一个标准的二次曲线方程可以表示为:其中A、B、C、D、E、F是曲线方程的系数。
对于椭圆而言,它可以被表示为:其中(x0, y0)是椭圆中心坐标,a和b分别是长轴和短轴的半径。
1.2 拟合方法椭圆拟合的目标是找到一组系数(A, B, C, D, E, F),使得给定的离散点集能够最好地满足椭圆方程。
常用的拟合方法是最小二乘法。
该方法通过最小化实际数据点与拟合曲线之间的残差平方和,来确定最佳的系数。
具体步骤如下:1.初始化系数(A, B, C, D, E, F)为初始值。
2.对于每个数据点(xi, yi),计算其到椭圆方程的距离d。
3.根据距离d,更新系数(A, B, C, D, E, F)。
4.重复步骤2和3,直到达到预设的迭代次数或收敛条件。
5.输出最终得到的系数(A, B, C, D, E, F)。
2. Python实现在Python中,我们可以使用SciPy库中的optimize模块来实现椭圆拟合。
optimize模块提供了curve_fit函数,该函数可以用于曲线拟合。
以下是一个示例代码:import numpy as npfrom scipy.optimize import curve_fitdef ellipse_func(xy_data,x0,y0,a,b):x = xy_data[:,0]y = xy_data[:,1]return ((x-x0)**2/a**2 + (y-y0)**2/b**2 - 1)def fit_ellipse(xy_data):x0_guess = np.mean(xy_data[:,0])y0_guess = np.mean(xy_data[:,1])a_guess = np.std(xy_data[:,0])b_guess = np.std(xy_data[:,1])popt, pcov = curve_fit(ellipse_func, xy_data, np.zeros(len(xy_data)), p0=[x0_guess, y0_guess, a_guess, b_guess])return popt# 示例用法xy_data = np.array([[1,2],[3,4],[5,6]])popt = fit_ellipse(xy_data)print(popt)在上述示例代码中,我们首先定义了一个椭圆方程的函数ellipse_func,该函数接受一组坐标数据和椭圆参数,并返回每个点到椭圆方程的距离。
指定椭圆圆心的椭圆拟合1.引言1.1 概述椭圆拟合是一种通过拟合一组散点数据来估计最佳椭圆参数的方法。
它在各个领域中都有广泛的应用,比如计算机视觉、图像处理、测量学和机器学习等。
椭圆作为数学上重要的几何形状之一,具有独特的特性和广泛的应用背景。
与其他几何形状相比,椭圆能够很好地描述一些自然界和人工系统中的真实数据。
本文将重点讨论指定椭圆圆心的椭圆拟合方法。
在传统的椭圆拟合方法中,通常将椭圆的圆心看作是未知的参数,需要通过迭代计算来获得。
然而,在某些应用场景中,我们已经有了对椭圆圆心的先验知识,因此可以将圆心作为已知参数进行椭圆拟合。
这种指定椭圆圆心的椭圆拟合能够更准确地估计椭圆的形状和位置。
在接下来的章节中,我们将首先介绍椭圆的定义和特性,包括其数学表达方式、离心率、焦点等。
然后,我们将详细讨论椭圆拟合的概念和应用,阐述其在不同领域中的意义和作用。
最后,我们将重点讨论指定椭圆圆心的椭圆拟合方法,并分析其优势和适用性。
本文的目标是通过深入探讨指定椭圆圆心的椭圆拟合方法,为读者提供系统的理论基础和实践指导。
通过该方法,我们可以更好地利用已知的先验信息来提高椭圆拟合的准确性和稳定性,为相关领域的研究和应用提供有力的支持。
接下来的章节将按照以下结构进行组织。
首先,我们将介绍椭圆的基本定义和特性,并解释椭圆参数的物理意义。
然后,我们将详细介绍椭圆拟合的概念和应用,包括椭圆拟合的常见算法和评价指标。
最后,我们将重点讨论指定椭圆圆心的椭圆拟合方法,包括优化算法和参数估计技术。
通过深入研究这些内容,读者将能够全面了解指定椭圆圆心的椭圆拟合方法,并能够在实际应用中灵活运用。
总之,本文将以指定椭圆圆心的椭圆拟合为主题,旨在为读者提供全面的理论和实践指导。
希望通过本文的阐述,能够增加读者对椭圆拟合方法的认识和理解,为相关领域的研究和应用提供有益的参考。
在接下来的章节中,我们将详细讨论椭圆的定义和特性,以及椭圆拟合的概念和方法。
C语言椭球拟合1. 概述椭球拟合是一种数学建模方法,用于将一组数据点拟合成一个椭球形状的曲面。
在C语言中,我们可以使用数值计算库和数学函数来实现椭球拟合算法。
本文将介绍椭球拟合的原理、算法以及C语言实现方法。
2. 椭球拟合原理椭球拟合的目标是找到一个椭球,使得该椭球与给定的数据点的残差最小。
残差是指数据点到椭球曲面的距离。
椭球拟合可以通过最小二乘法来实现,即最小化残差的平方和。
3. 椭球拟合算法3.1 数据预处理在进行椭球拟合之前,需要对数据进行预处理。
预处理的目的是去除异常值和噪声,以提高拟合的准确性。
常用的预处理方法包括平滑、滤波和数据修正等。
3.2 椭球拟合步骤椭球拟合可以分为以下几个步骤: 1. 初始化椭球参数:包括椭球的中心点坐标、半长轴、半短轴和半高轴。
2. 迭代拟合:通过迭代的方式,不断调整椭球参数,使得残差最小化。
3. 终止条件:当达到一定的迭代次数或残差足够小时,终止迭代过程。
4. 输出结果:输出拟合得到的椭球参数。
4. C语言实现4.1 引入数值计算库在C语言中,我们可以使用数值计算库来进行矩阵运算和优化算法的实现。
常用的数值计算库包括GNU Scientific Library (GSL)和Intel Math Kernel Library (MKL)等。
4.2 椭球拟合函数设计根据椭球拟合算法的步骤,我们可以设计一个椭球拟合的函数。
该函数的输入参数包括数据点集合和拟合的精度要求,输出参数为拟合得到的椭球参数。
void ellipsoidFit(double* data, int numPoints, double precision, double* ellip soidParams){// 实现椭球拟合算法// ...}4.3 示例代码下面是一个简单的示例代码,演示了如何使用C语言实现椭球拟合算法。
#include <stdio.h>#include <stdlib.h>#include <math.h>void ellipsoidFit(double* data, int numPoints, double precision, double* ellip soidParams){// 实现椭球拟合算法// ...}int main(){// 生成测试数据int numPoints = 100;double* data = (double*)malloc(numPoints * 3 * sizeof(double));for (int i = 0; i < numPoints; i++){double x = (double)rand() / RAND_MAX;double y = (double)rand() / RAND_MAX;double z = (double)rand() / RAND_MAX;data[i * 3] = x;data[i * 3 + 1] = y;data[i * 3 + 2] = z;}// 调用椭球拟合函数double ellipsoidParams[6];ellipsoidFit(data, numPoints, 0.001, ellipsoidParams);// 输出拟合结果printf("Ellipsoid parameters: (%f, %f, %f, %f, %f, %f)\n",ellipsoidParams[0], ellipsoidParams[1], ellipsoidParams[2],ellipsoidParams[3], ellipsoidParams[4], ellipsoidParams[5]);// 释放内存free(data);return 0;}5. 总结椭球拟合是一种重要的数学建模方法,在计算机图形学、计算机视觉和机器学习等领域有广泛应用。
OpenCV Python拟合的椭圆的拟合系数引言椭圆是数学中的一种特殊曲线,它在计算机视觉领域中具有广泛的应用。
OpenCV 是一个开源的计算机视觉库,其中包含了许多用于图像处理和分析的函数和算法。
在本文中,我们将探讨如何使用OpenCV Python来拟合椭圆,并了解拟合系数的含义和用途。
什么是椭圆拟合椭圆拟合是指通过一组离散的点,找到与这些点最匹配的椭圆曲线。
在计算机视觉中,椭圆拟合常用于目标检测和形状分析。
通过拟合椭圆,我们可以获得椭圆的中心位置、长轴和短轴长度、横纵轴的方向等信息。
椭圆拟合的方法OpenCV提供了两种方法来进行椭圆拟合:直接拟合和最小二乘拟合。
1. 直接拟合法直接拟合法是基于Hough变换的一种方法。
它通过对图像中的边缘进行霍夫变换,将边缘点的坐标转换为椭圆参数空间上的投票。
然后通过统计投票数最多的参数,得到椭圆的拟合结果。
直接拟合法的优点是速度快,适用于对边缘清晰的图像进行拟合。
2. 最小二乘拟合法最小二乘拟合法是通过最小化残差来求解椭圆拟合问题。
它通过最小化所有数据点到拟合椭圆的距离平方和来优化椭圆参数。
最小二乘拟合法的优点是可以处理含有噪声的图像,但速度相对较慢。
使用OpenCV Python进行椭圆拟合在本节中,我们将介绍使用OpenCV Python进行椭圆拟合的基本步骤和代码示例。
步骤1:导入库和模块首先,我们需要导入必要的库和模块,包括OpenCV和NumPy。
可以使用pip命令来安装相应的库。
import cv2import numpy as np步骤2:读取图像接下来,我们需要读取一幅图像,并将其转换为灰度图像。
可以使用OpenCV的cv2.imread()函数来读取图像,并使用cv2.cvtColor()函数将图像转换为灰度图像。
image = cv2.imread('image.jpg')gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)步骤3:图像处理在进行椭圆拟合之前,通常需要对图像进行一些预处理,以提高拟合的准确性。
椭圆拟合算法
椭圆拟合算法是一种特殊的图像处理技术,它可以自动识别输入图像中存在的椭圆形状,并利用这些椭圆形状进行图像的处理。
该技术可以用于编写计算机软件识别椭圆形对象。
椭圆拟合算法是图像处理的一个重要分支。
它的核心思想是使用椭圆模型来拟合不同类型的图像,捕捉其椭圆形状特点。
例如,椭圆拟合算法可用于识别人脸或手指等凸起物体。
该算法可以自动调节椭圆状参数,以最大程度准确地拟合图像特征。
在对图像进行椭圆拟合之前,通常需要对原始图像进行灰度化、二值化和腐蚀等前处理步骤。
灰度化可以去除图像中的彩色噪声,从而使椭圆模型更容易拟合图像特征。
而二值化的目的是将图像分割成黑白两部分,以便更准确地拟合椭圆状参数;腐蚀也可以帮助椭圆模型解决前一步图像处理过程中可能存在的瑕疵问题。
椭圆拟合算法可以用于许多图像处理应用,例如计算机视觉跟踪、坐标测量、检测与识别等。
例如,它可以用于检测物体的形状和位置,也可以用于识别图像中的文本,从而实现自主操作。
在机器视觉中,椭圆拟合算法可以用于跟踪物体的运动轨迹,这样可以更好地观察物体的变化趋势,也能更好地计算物体之间的距离。
此外,椭圆拟合算法也可以用于检测尺度变换,从而帮助构建精确的模型。
椭圆拟合算法的另一个优势是其计算复杂度低,使它更容易实现和部署。
与其他图像处理算法相比,椭圆拟合算法可以快速完成拟合
操作,从而减少了处理时间和计算负载。
总之,椭圆拟合算法是一项重要的图像处理技术,它可以有效地识别椭圆形状的物体,并自动调节椭圆状参数以拟合其特征,改善整体图像处理效果。
此外,它还具有低计算复杂度的优势,可以有效地加快图像处理的效率。
椭球拟合最小二乘法
椭球拟合最小二乘法是一种利用数学模型对一组数据点进行拟合
的方法。
它的目的是找到一个椭球,使得该椭球与数据点的误差最小。
椭球拟合最小二乘法的基本思想是,假设数据点的分布在一个椭
球上,我们的目标是找到该椭球的中心坐标、三个轴长和姿态参数。
具体的步骤如下:
1. 假设椭球的方程为:(x-x0)^2/a^2 + (y-y0)^2/b^2 + (z-
z0)^2/c^2 = 1,其中(x0, y0, z0)为椭球的中心坐标,a、b、c分别
为椭球的三个轴长。
2. 定义误差函数:E = Σ[((x-x0)^2/a^2 + (y-y0)^2/b^2 +
(z-z0)^2/c^2)-1],对所有数据点求和。
3. 使用最小二乘法的原理,求解最小化误差函数的问题。
具体
而言,我们需要对中心坐标(x0, y0, z0)、三个轴长a、b、c以及姿
态参数进行优化。
4. 通过迭代的方式,利用数值优化算法(如Levenberg-Marquardt算法)求解最小化误差函数的问题,得到最优的中心坐标、轴长和姿态参数。
最后,通过这个优化结果,我们可以得到一个最优的椭球模型,
使得该椭球与数据点的拟合误差最小。
这个方法在计算机视觉、几何
建模等领域都有广泛的应用。