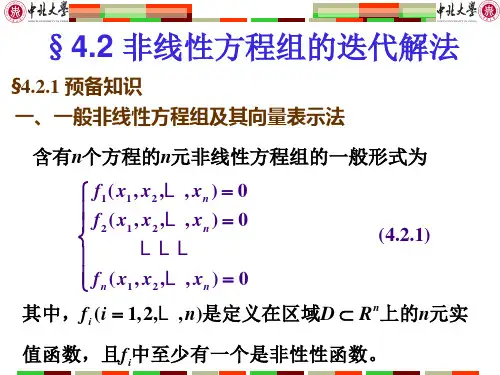
计算方法:非线性方程迭代求解
- 格式:ppt
- 大小:3.48 MB
- 文档页数:32
求解非线性方程的三种新的迭代法
迭代法是一种通过迭代逼近的方式来求解方程的方法。
它的基本思想是通过不断逼近
方程的解,使得逼近值与真实解的差距越来越小,最终得到方程的解。
下面介绍三种新的迭代法:牛顿迭代法,弦截法和切线法。
一、牛顿迭代法
牛顿迭代法是一种通过利用函数导数的信息来逼近方程解的方法。
它的迭代公式为:
x_(n+1) = x_n - f(x_n)/f'(x_n)
x_n表示第n次迭代得到的逼近解,f(x_n)表示在x_n处的函数值,f'(x_n)表示在x_n 处的导数值。
牛顿迭代法的优点是收敛速度快,通常是二阶收敛,但其缺点是需要计算函数的导数,如果导数计算困难或者导数为零的情况下,该方法可能不适用。
二、弦截法
三、切线法
切线法的优点和牛顿迭代法类似,但其缺点是需要计算函数的导数,且对于初始逼近
解的选择比较敏感。
牛顿迭代法、弦截法和切线法都是三种常用的非线性方程迭代法。
它们各自有着优点
和缺点,适用的领域和条件也不尽相同。
在实际问题中,需要根据具体情况选择合适的方
法来求解非线性方程。
解非线性方程的牛顿迭代法及其应用一、本文概述非线性方程是数学领域中的一个重要研究对象,其在实际应用中广泛存在,如物理学、工程学、经济学等领域。
求解非线性方程是一个具有挑战性的问题,因为这类方程往往没有简单的解析解,需要通过数值方法进行求解。
牛顿迭代法作为一种古老而有效的数值求解方法,对于求解非线性方程具有重要的应用价值。
本文旨在介绍牛顿迭代法的基本原理、实现步骤以及在实际问题中的应用。
我们将详细阐述牛顿迭代法的基本思想,包括其历史背景、数学原理以及收敛性分析。
我们将通过具体实例,展示牛顿迭代法的计算步骤和实际操作过程,以便读者能够更好地理解和掌握该方法。
我们将探讨牛顿迭代法在各个领域中的实际应用,包括其在物理学、工程学、经济学等领域中的典型应用案例,以及在实际应用中可能遇到的问题和解决方法。
通过本文的介绍,读者可以深入了解牛顿迭代法的基本原理和应用技巧,掌握其在求解非线性方程中的实际应用方法,为进一步的研究和应用提供有力支持。
二、牛顿迭代法的基本原理牛顿迭代法,又称为牛顿-拉夫森方法,是一种在实数或复数域上近似求解方程的方法。
其基本原理是利用泰勒级数的前几项来寻找方程的根。
如果函数f(x)在x0点的导数f'(x0)不为零,那么函数f(x)在x0点附近可以用一阶泰勒级数来近似表示,即:这就是牛顿迭代法的基本迭代公式。
给定一个初始值x0,我们可以通过不断迭代这个公式来逼近f(x)的根。
每次迭代,我们都用当前的近似值x0来更新x0,即:这个过程一直持续到满足某个停止条件,例如迭代次数达到预设的上限,或者连续两次迭代的结果之间的差小于某个预设的阈值。
牛顿迭代法的收敛速度通常比线性搜索方法快,因为它利用了函数的导数信息。
然而,这种方法也有其局限性。
它要求函数在其迭代点处可导,且导数不为零。
牛顿迭代法可能不收敛,如果初始点选择不当,或者函数有多个根,或者根是重根。
因此,在使用牛顿迭代法时,需要谨慎选择初始点,并对迭代过程进行适当的监控和调整。
非线性方程组求解的牛顿迭代法用MATLAB实现首先,我们需要定义非线性方程组。
假设我们要求解方程组:```f1(x1,x2)=0f2(x1,x2)=0```其中,`x1`和`x2`是未知数,`f1`和`f2`是非线性函数。
我们可以将这个方程组表示为向量的形式:```F(x)=[f1(x1,x2);f2(x1,x2)]=[0;0]```其中,`F(x)`是一个列向量。
为了实现牛顿迭代法,我们需要计算方程组的雅可比矩阵。
雅可比矩阵是由方程组的偏导数组成的矩阵。
对于方程组中的每个函数,我们可以计算其对每个变量的偏导数,然后将这些偏导数组成一个矩阵。
在MATLAB中,我们可以使用`jacobi`函数来计算雅可比矩阵。
以下是一个示例函数的定义:```matlabfunction J = jacobi(x)x1=x(1);x2=x(2);J = [df1_dx1, df1_dx2; df2_dx1, df2_dx2];end```其中,`x`是一个包含未知数的向量,`df1_dx1`和`df1_dx2`是`f1`对`x1`和`x2`的偏导数,`df2_dx1`和`df2_dx2`是`f2`对`x1`和`x2`的偏导数。
下一步是实现牛顿迭代法。
牛顿迭代法的迭代公式为:```x(k+1)=x(k)-J(x(k))\F(x(k))```其中,`x(k)`是第`k`次迭代的近似解,`\`表示矩阵的求逆操作。
在MATLAB中,我们可以使用如下代码来实现牛顿迭代法:```matlabfunction x = newton_method(x_initial)max_iter = 100; % 最大迭代次数tol = 1e-6; % 收敛阈值x = x_initial; % 初始解for k = 1:max_iterF=[f1(x(1),x(2));f2(x(1),x(2))];%计算F(x)J = jacobi(x); % 计算雅可比矩阵 J(x)delta_x = J \ -F; % 计算增量 delta_xx = x + delta_x; % 更新 xif norm(delta_x) < tolbreak; % 达到收敛条件,停止迭代endendend```其中,`x_initial`是初始解的向量,`max_iter`是最大迭代次数,`tol`是收敛阈值。

求解非线性方程的三种新的迭代法1. 引言1.1 介绍迭代法迭代法是一种重要的数值计算方法,广泛应用于非线性方程的求解、函数极值点的求解等问题中。
迭代法的基本思想是通过逐步逼近的方式,找到函数的根或者极值点。
这种方法在面对复杂的数学问题时具有很大的优势,可以通过简单的计算步骤逐渐接近最终解。
与解析解相比,迭代法更适用于无法通过代数运算求解的问题,或者求解过程较为繁琐的问题。
迭代法的实现通常需要选择一个初始值,并通过反复迭代计算来逼近真实解。
在每一步迭代中,都会根据当前的估计值计算新的估计值,直到满足一定的精度要求为止。
迭代法虽然不能保证每次都能得到精确解,但在实际应用中往往能够取得较好的结果。
迭代法是一种简单而有效的数值计算方法,尤其适用于非线性方程求解等复杂问题。
通过逐步逼近的方式,迭代法可以帮助我们解决那些传统方法难以处理的问题,为现代科学技术的发展提供重要支持。
1.2 非线性方程的求解意义非线性方程在数学和工程领域中广泛存在,其求解具有重要的理论和实际意义。
非线性方程的求解能够帮助解释和预测许多自然现象,包括流体动力学、电路分析、材料力学等领域中的问题。
非线性方程的求解也是许多科学研究和工程设计中必不可少的一环,例如在经济学、生物学、物理学等多个学科中都有非线性方程存在。
传统的解析方法难以解决非线性方程,因此迭代法成为求解非线性方程的重要工具。
迭代法是一种通过不断逼近解的方法,逐步逼近方程的解。
通过迭代法,可以在复杂的非线性方程中找到数值解,从而解决实际问题。
非线性方程的求解意义在于帮助我们更好地理解和掌握复杂系统的性质和行为。
通过求解非线性方程,我们可以揭示系统中隐藏的规律和关系,为科学研究和工程设计提供重要的参考和支持。
发展高效的迭代法求解非线性方程具有重要意义,可以推动科学技术的进步,促进社会的发展和进步。
2. 正文2.1 牛顿迭代法牛顿迭代法是一种非常经典的求解非线性方程的方法,其基本思想是通过不断逼近函数的零点来求解方程。
非线性方程的迭代算法在数学中,非线性方程是指对于未知数 x 和常数 a,b,c,d,... 等的某些函数 f(x) 中,包含了 x 的幂次项(例如 x^2、x^3 等),或者包含了 x 的带有次数的函数(例如 sin(x)、cos(x) 等)。
与线性方程不同的是,非线性方程一般没有解析解,只能通过数值计算的方式求解。
其中,迭代算法是一种经典的求解非线性方程的方法。
一、迭代算法的基础1.1 定义迭代算法是指通过一系列的计算过程,逐步逼近方程的解。
其基本思想是将原方程进行变形,使其成为迭代式,从而通过不断迭代计算,求解出方程的解。
具体地说,在求解方程 f(x) = 0 时,可以将其转化为 x = g(x) 的形式,然后从一个初始值 x0 开始,通过迭代计算 x(n+1) = g(x(n)),不断逼近解 x*,其中 x* 为方程的根。
1.2 原理迭代算法的实现基于牛顿-拉弗森迭代法(Newton-Raphson method),即对于连续可导的函数 f(x),在 x(n) 处进行泰勒展开(Taylor expansion),并将展开式中的一、二阶导数用 f(x(n)) 表示,可以得到以下迭代式:x(n+1) = x(n) - f(x(n)) / f'(x(n))其中,f'(x(n)) 表示函数 f(x) 在 x(n) 处的一阶导数,而 x(n+1) 是通过迭代计算得到的下一个值。
这个迭代式会不断逼近方程的解,直至满足某个精度要求为止。
1.3 优缺点迭代算法具有精度高、收敛速度快等优点,可以求解大多数数学问题,包括非线性方程的求解、最优化问题等。
但是,迭代算法的效率受到 x0 的初值选取、迭代次数的选取、函数 g(x) 的平滑性等因素的影响,因此在实际应用中需要慎重考虑。
二、迭代算法的实现2.1 常见的迭代算法除了牛顿-拉弗森迭代法以外,还有其他经典的迭代算法,例如二分法、不动点迭代法、弦截法等,它们基本的实现方式和原理大致相同,只是迭代式的具体形式会有所不同。
求解非线性方程的三种新的迭代法如何构造合适的迭代法求解非线性方程是数值计算中的一个基本问题。
本文对解非线性方程的迭代法进行分析与拓展,以经典的牛顿迭代法和弦截法为基础,构造了三种新的迭代法。
通过数值例子表明,这三种迭代法在一定程度上加快了收敛速度。
标签:非线性方程;迭代法;数值模拟众所周知,现实生活中的许多问题都可以转化为非线性方程解的问题。
但是,由于方程求解问题的复杂性以及直接求解问题的多变性,使得非线性方程的求解绝非易事,一般不能直接对其求解。
因此,迭代法[1-3]是非线性方程求根中最基本、最常用的方法,其思想是寻找一个精确度较高的近似解来代替无法得到的精确解,而不同的迭代格式具有不同的逼近速度与准确度。
近年来,很多学者在牛顿迭代方法的基础上提出了许多改进的迭代法。
张旭[4]构造了一种三阶含牛顿迭代法;单吉宁等[5]对解非线性方程的牛顿法进行了改进;张辉等[6]基于四点牛顿-柯特斯求积公式提出了六阶迭代方法;黄娜等[7]提出一种新的三阶迭代法;王小瑞等[8]构造了条件最优两步迭代法;高建强等[9]探究了牛顿迭代对收敛速度的影响;王尧等[10]提出求解非线性方程的三步六阶迭代法。
为此,本文在上述工作基础上提出了一些新的迭代格式用于求解非线性方程,通过数值例子来检验迭代法的有效性与实用性。
1 三种新的迭代格式1.1 迭代格式一设非线性方程,在方程的解区间之内有一个近似解为,将在近似解点处依泰勒公式对其作展开处理:在牛顿迭代格式中取前两项近似的表示原方程,即:类似地,取前三项近似表示原方程,可以得到:设方程的解为且则有如下:经处理得到新的迭代格式如下:迭代格式(1)式中的右边存在了这一项,将其记作加以区分,将迭代格式更改为:同时对于这一项的计算利用牛顿迭代格式来计算,即,则可得新的迭代格式一:设可控制误差为,则在进行次迭代之后的近似值为。
那么只需时,迭代终止。
1.2 迭代格式二牛顿迭代格式中用差商替换得到了割线法的迭代格式。