Newton迭代法求解非线性方程
- 格式:docx
- 大小:128.28 KB
- 文档页数:8
求解非线性方程的三种新的迭代法
迭代法是一种通过迭代逼近的方式来求解方程的方法。
它的基本思想是通过不断逼近
方程的解,使得逼近值与真实解的差距越来越小,最终得到方程的解。
下面介绍三种新的迭代法:牛顿迭代法,弦截法和切线法。
一、牛顿迭代法
牛顿迭代法是一种通过利用函数导数的信息来逼近方程解的方法。
它的迭代公式为:
x_(n+1) = x_n - f(x_n)/f'(x_n)
x_n表示第n次迭代得到的逼近解,f(x_n)表示在x_n处的函数值,f'(x_n)表示在x_n 处的导数值。
牛顿迭代法的优点是收敛速度快,通常是二阶收敛,但其缺点是需要计算函数的导数,如果导数计算困难或者导数为零的情况下,该方法可能不适用。
二、弦截法
三、切线法
切线法的优点和牛顿迭代法类似,但其缺点是需要计算函数的导数,且对于初始逼近
解的选择比较敏感。
牛顿迭代法、弦截法和切线法都是三种常用的非线性方程迭代法。
它们各自有着优点
和缺点,适用的领域和条件也不尽相同。
在实际问题中,需要根据具体情况选择合适的方
法来求解非线性方程。
⾮线性⽅程求解基于MATLAB的⾮线性⽅程的五种解法探讨摘要:本⽂利⽤matlab软件对⾮线性⽅程解法中的⼆分法、简单迭代法、⽜顿法、割线法以及Steffensen法的数值分析⽅法的算法原理及实现⽅法进⾏了探讨。
对f x x x=+-()2ln2的零点问题,分别运⽤以上五种不同的⽅法进⾏数值实验,⽐较⼏种解法的优缺点并进⾏初步分析评价。
关键词:⼆分法、简单迭代法、⽜顿法、割线法、Steffensen法1、引⾔在很多实际问题中,经常需要求⾮线性⽅程f(x) =0的根。
⽅程f(x) =0的根叫做函数f(x)的零点。
由连续函数的特性知:若f(x)在闭区间[a,b ]上连续,且()()0f a f b<.则f(x) =0在开区间(a,b)内⾄少有⼀个实根。
这时称[a,b]为⽅程f(x) =0的根的存在区间。
本⽂主要对⾮线性⽅程的数值解法进⾏分析,并介绍了⾮线性⽅程数值解法的五种⽅法。
并设=+-.f x x x()2ln2f x在[1,2]上的图形,如图1:. 显然,函数在[1,2]之间有⼀个零点。
⾸先画出()2、计算机配置操作系统Windows 7 旗舰版内存2GB处理器AMD 4核 A6-3400M APU 1.4GHz图.13、⼆分法⼆分法的基本思想是将⽅程根的区间平分为两个⼩区间,把有根的⼩区间再平分为两个更⼩的区间,进⼀步考察根在哪个更⼩的区间内。
如此继续下去,直到求出满⾜精度要求的近似值。
设函数()f x 在区间[a,b ]上连续,且f(a)·f(b) <0,则[a,b ]是⽅程f(x) =0的根的存在区间,设其内有⼀实根,记为x*。
取区间[a,b ]的中点()2k a b x +=并计算1()f x ,则必有下列三种情况之⼀成⽴: (1) 1()f x =0,x1就是⽅程的根x*;(2)()f a .1()f x <0,⽅程的根x*位于区间[a, 1x ]之中,此时令111,a a b x ==; (3)1()f x .()f b <0,⽅程的根x*位于区间[1x ,b ]之中,此时令11a x =,1b b =。

非线性方程求根——牛顿迭代法一、牛顿迭代法的基本思想基本思想:将非线性方程逐步归结为某种线性方程求解。
设方程f (x )=0有近似根x k (f `(x k )≠0),将f (x )在x k 展开:(ξ在x 和x k 之间)2()()()()()()2!k k k k f f x f x f x x x x x ξ'''=+-+-()()()()k k k f x f x f x x x '≈+-可设记该线性方程的根为x k +1,则()()()0k k k f x f x x x '+-=1()()k k k k f x x x f x +=-'故f (x )=0可近似表示为即为Newton 法迭代格式。
(k =0,1,……)例:用Newton 迭代法求方程310x x --=在x 0=1.5附近的近似实根。
解:32()1,()31f x x x f x x '=--=-迭代公式为312131kk k k k x x x x x +--=--计算步骤如下:(1)取初值x 0=1.5;(2)按照迭代公式计算x 1;(3)若|x 1-x 0|<=0.00001,终止迭代;否则,x 0=x 1;转(2);(4)输出迭代次数和近似根.二、牛顿迭代法的实现MATLAB求解程序设计:方程及一阶导数函数:function[fun,dfun]=fun0(x)fun=x^3-x-1;%求原函数的值dfun=3*x^2-1;%求一阶导数的值计算主程序:clearx0=1.5;[fun,dfun]=fun0(x0);x1=x0-fun/dfun;i=1;while abs(x1-x0)>1e-5x0=x1;[fun,dfun]=fun0(x0);x1=x0-fun/dfun;i=i+1;enddisp('the solution is x1=')x1disp('the iter time is ')i计算结果为:the solution is x1=x1 =1.3247the iter time isi =4可见经过4次迭代即到达要求的精度,原方程的一个近似实数根为1.3247.三、牛顿迭代法的收敛性牛顿迭代法的迭代函数:)()()(x f x f x x '-=ϕ222)]([)()()]([)()()]([1)(x f x f x f x f x f x f x f x '''='''-'-='ϕ设f (x *)=0,f `(x *)≠0,则ϕ`(x *)=0,故Newton 迭代法在x *附近至少平方收敛。
解非线性方程的牛顿迭代法及其应用一、本文概述非线性方程是数学领域中的一个重要研究对象,其在实际应用中广泛存在,如物理学、工程学、经济学等领域。
求解非线性方程是一个具有挑战性的问题,因为这类方程往往没有简单的解析解,需要通过数值方法进行求解。
牛顿迭代法作为一种古老而有效的数值求解方法,对于求解非线性方程具有重要的应用价值。
本文旨在介绍牛顿迭代法的基本原理、实现步骤以及在实际问题中的应用。
我们将详细阐述牛顿迭代法的基本思想,包括其历史背景、数学原理以及收敛性分析。
我们将通过具体实例,展示牛顿迭代法的计算步骤和实际操作过程,以便读者能够更好地理解和掌握该方法。
我们将探讨牛顿迭代法在各个领域中的实际应用,包括其在物理学、工程学、经济学等领域中的典型应用案例,以及在实际应用中可能遇到的问题和解决方法。
通过本文的介绍,读者可以深入了解牛顿迭代法的基本原理和应用技巧,掌握其在求解非线性方程中的实际应用方法,为进一步的研究和应用提供有力支持。
二、牛顿迭代法的基本原理牛顿迭代法,又称为牛顿-拉夫森方法,是一种在实数或复数域上近似求解方程的方法。
其基本原理是利用泰勒级数的前几项来寻找方程的根。
如果函数f(x)在x0点的导数f'(x0)不为零,那么函数f(x)在x0点附近可以用一阶泰勒级数来近似表示,即:这就是牛顿迭代法的基本迭代公式。
给定一个初始值x0,我们可以通过不断迭代这个公式来逼近f(x)的根。
每次迭代,我们都用当前的近似值x0来更新x0,即:这个过程一直持续到满足某个停止条件,例如迭代次数达到预设的上限,或者连续两次迭代的结果之间的差小于某个预设的阈值。
牛顿迭代法的收敛速度通常比线性搜索方法快,因为它利用了函数的导数信息。
然而,这种方法也有其局限性。
它要求函数在其迭代点处可导,且导数不为零。
牛顿迭代法可能不收敛,如果初始点选择不当,或者函数有多个根,或者根是重根。
因此,在使用牛顿迭代法时,需要谨慎选择初始点,并对迭代过程进行适当的监控和调整。
非线性方程组求解的牛顿迭代法用MATLAB实现首先,我们需要定义非线性方程组。
假设我们要求解方程组:```f1(x1,x2)=0f2(x1,x2)=0```其中,`x1`和`x2`是未知数,`f1`和`f2`是非线性函数。
我们可以将这个方程组表示为向量的形式:```F(x)=[f1(x1,x2);f2(x1,x2)]=[0;0]```其中,`F(x)`是一个列向量。
为了实现牛顿迭代法,我们需要计算方程组的雅可比矩阵。
雅可比矩阵是由方程组的偏导数组成的矩阵。
对于方程组中的每个函数,我们可以计算其对每个变量的偏导数,然后将这些偏导数组成一个矩阵。
在MATLAB中,我们可以使用`jacobi`函数来计算雅可比矩阵。
以下是一个示例函数的定义:```matlabfunction J = jacobi(x)x1=x(1);x2=x(2);J = [df1_dx1, df1_dx2; df2_dx1, df2_dx2];end```其中,`x`是一个包含未知数的向量,`df1_dx1`和`df1_dx2`是`f1`对`x1`和`x2`的偏导数,`df2_dx1`和`df2_dx2`是`f2`对`x1`和`x2`的偏导数。
下一步是实现牛顿迭代法。
牛顿迭代法的迭代公式为:```x(k+1)=x(k)-J(x(k))\F(x(k))```其中,`x(k)`是第`k`次迭代的近似解,`\`表示矩阵的求逆操作。
在MATLAB中,我们可以使用如下代码来实现牛顿迭代法:```matlabfunction x = newton_method(x_initial)max_iter = 100; % 最大迭代次数tol = 1e-6; % 收敛阈值x = x_initial; % 初始解for k = 1:max_iterF=[f1(x(1),x(2));f2(x(1),x(2))];%计算F(x)J = jacobi(x); % 计算雅可比矩阵 J(x)delta_x = J \ -F; % 计算增量 delta_xx = x + delta_x; % 更新 xif norm(delta_x) < tolbreak; % 达到收敛条件,停止迭代endendend```其中,`x_initial`是初始解的向量,`max_iter`是最大迭代次数,`tol`是收敛阈值。
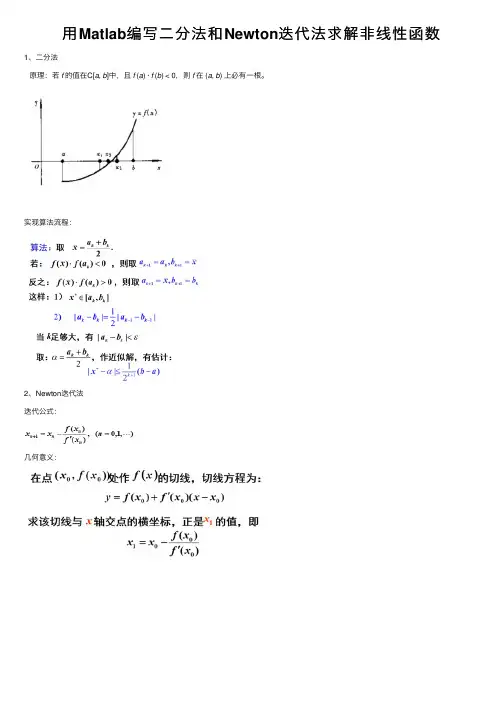
⽤Matlab编写⼆分法和Newton迭代法求解⾮线性函数1、⼆分法原理:若f的值在C[a, b]中,且f (a) · f (b) < 0,则f在 (a, b) 上必有⼀根。
实现算法流程:2、Newton迭代法迭代公式:⼏何意义:3、求解问题⽤Newton法和⼆分法求的解。
4、代码实现1 clear;close;clc2 a=0;b=1;%根区间3 e=10^(-6);%根的容许误差4 [X , N]=dichotomy(e,a,b);%⼆分法5 p0=0.5;%初始值6 N=15;%迭代次数7 [X1]=Newdon(p0,e,N);%Newton迭代法89 function [X , N]=dichotomy(deta,a,b)10 % 函数dichotomy:⼆分法11 %输⼊值:12 %fun:⽅程函数13 %deta:根的容许误差14 %有根区间:[a,b]15 %输出值16 %X:求解到的⽅程的根17 %N:总的迭代次数18 N=1+fix(log2((b-a)/deta));%由公式7.2求得,取整数|X_N-X*|<=(b-a)/2^N<deta,求N19 n=1;20 f1=myfunction(a);21 f2=myfunction(b);22if (f1*f2>0)23 disp('根不在输⼊的区间⾥,请重新输⼊区间');24else25while n <= N26 x=(a+b)/2;27if myfunction(a)*myfunction(x)>028 a=x;29else30 b=x;31 end32 n=n+1;33 end34 X=x;35 fprintf('第%d次⼆分法求出的⽅程的根:\n',N);36 fprintf('X=\n');37 disp(X);38 end39 end4041 function [P]=Newdon(p0,TOL,N)42 %求⽅程组的解43 %输⼊参数44 %初始值:p045 %误差容限:TOL46 %最⼤迭代次数:N47 %输出参数:48 %⽅程近似解:p49 %或失败信息“Method failed”50 format long;51 n=1;%初始迭代次数52 syms x;53while n<=N54if abs(subs(diff(myfunction(x)),x,p0))<TOL55 P=p0;56break;57else58if subs(diff(myfunction(x),2),x,p0)==059 disp('Method failed');60break;61else62 p=p0-myfunction(p0)/subs(diff(myfunction(x)),x,p0);63 p=eval(p);%将exp的值转为⼩数值64if(abs(p-p0)<TOL)65 P=p;66break;67else68 p0=p;69 end70 end71 end72 n=n+1;73 end74 % P=vpa(P,10);%将分数转为⼩数并保留8位⼩数75 fprintf('第%d次NeWton迭代法求出的⽅程的根:\n',N);76 fprintf('P=\n');77 disp(P);78 end7980 function f=myfunction(x)81 f=x*exp(x)-1;82 end5、求解结果。
五. 讨论分析当初始值选取离零点较远时将导致算法无法使用,例如第三题,将初始值改为2就无法计算出结果了,显示如下例如求020sin 35=-+-x x e x 的根,其中控制精度1010-=eps ,最大迭代次数40=M ,在steffensen 加速迭代方法的程序中,我们只需改动:it_max=40; ep=1e-10, 其余不变 。
利用以上程序,我们只需输入:phi=inline('exp(5*x)-sin(x)+(x)^3-20');[x_star,index,it]=steffensen(phi,0.5)可得:x_star = 0.637246094753909index = 0it = 41观察上述结果,index = 0,it = 41表明迭代失败,所以使用以上方法估计的时候,应该尽量估计出解的范围,偏离不应过大,距离增加迭代次数增加,也有可能迭代失败六. 改进实验建议根据上述分析,我认为,应该先对函数作一个简图,方便知道解的大概位置,然后我们才将这个大概值代入Newton 法或者Steffensen 中进行求解。
当然,我们可以用其他数学软件实现Newton 迭代法,我们可以用z-z 超级画板,其操作流程为:牛顿迭代法的公式是:x n+1=x n-f(x n)/f'(x n)。
下面我们就用牛顿迭代法设计程序求方程f(x)=ln(x)+2*x-6的近似解。
(一)观察方程f(x)=0的零点位置(1)显示坐标系的坐标刻度。
(2)作出函数y=ln(x)+2*x-6的图像,如下图所示:可以观察到方程的根在区间[2,3]上,我们可以设定近似解的初始值为2。
(二)设计求方程近似解的程序(1)在程序工作区中输入:f(x){ln(x)+2*x-6;}执行后,返回结果为:>> f(x) #这表示在计算机已经完成了函数f(x)的定义。
(2)定义f(x)的导函数g(x),在程序工作区中输入:Diff(f(x),x);执行后,返回结果为:>> 2+1/x #得到了f(x)的导函数。
牛顿法牛顿法作为求解非线性方程的一种经典的迭代方法,它的收敛速度快,有内在函数可以直接使用。
结合着matlab 可以对其进行应用,求解方程。
牛顿迭代法(Newton Newton’’s s method method )又称为牛顿-拉夫逊方法(Newton-Raphson method ),它是牛顿在17世纪提出的一种在实数域和复数域上近似求解方程的方法,其基本思想是利用目标函数的二次Taylor 展开,并将其极小化。
牛顿法使用函数()f x 的泰勒级数的前面几项来寻找方程()0f x =的根。
牛顿法是求方程根的重要方法之一,其最大优点是在方程()0f x =的单根附近具有平方收敛,而且该法还可以用来求方程的重根、复根,此时非线性收敛,但是可通过一些方法变成线性收敛。
收敛。
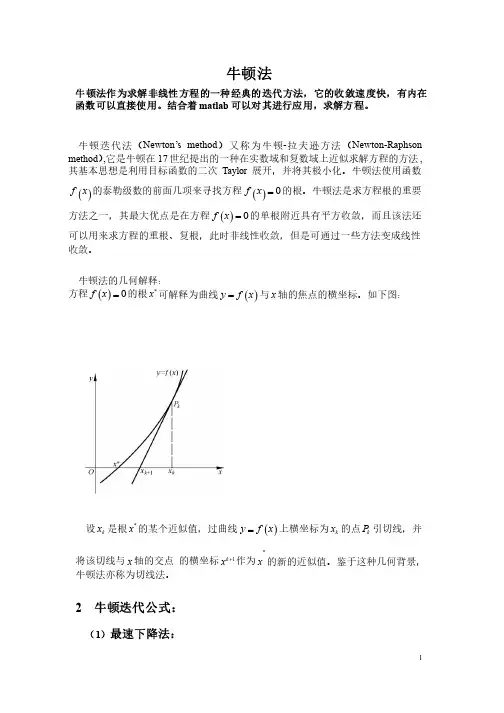
牛顿法的几何解释:牛顿法的几何解释:方程()0f x =的根*x 可解释为曲线()y f x =与x 轴的焦点的横坐标。
如下图:轴的焦点的横坐标。
如下图:设k x 是根*x 的某个近似值,过曲线()y f x =上横坐标为k x 的点k P 引切线,并将该切线与x 轴的交点轴的交点 的横坐标1k x +作为*x 的新的近似值。
鉴于这种几何背景,牛顿法亦称为切线法。
牛顿法亦称为切线法。
2 牛顿迭代公式:(1)最速下降法:x-d gk k×Gg sks×GGd 101x x x -(1)令k k G v I k G -=+,其中:,其中:0k v =,如果k G 正定;0,k v >否则。
否则。
(2)计算_k G 的Cholesky 分解,_T k k k k G L D L =。
(3)解_k k G d g =-得k d 。
(4)令1k k k x x d +=+牛顿法的优点是收敛快,缺点一是每步迭代要计算()()'k k f x f x 及,计算量较大且有时()'k fx 计算较困难,二是初始近似值0x 只在根*x附近才能保证收敛,如0x 给的不合适可能不收敛。
区间牛顿法(Interval Newton Method)是一种用于求解非线性方程的数值方法,它基于牛顿迭代法,并结合了区间分析的思想。
传统的牛顿迭代法是通过不断迭代来逼近函数的根。
而区间牛顿法引入了区间分析的概念,将数值计算的结果表示为一个区间,同时利用区间的包含关系来逐步缩小根的可能范围。
区间牛顿法的基本步骤如下:1. 初始化:给定一个包含根点的初始区间。
2. 迭代计算:利用牛顿迭代公式,在每一步中,计算函数在当前区间的导数,并将结果与当前区间的函数值进行运算。
如果运算结果与零区间相交,则根可能在当前区间内;否则,缩小搜索的区间范围。
3. 判断终止条件:当满足预设的终止条件时,停止迭代,并输出最终的结果。
区间牛顿法的一个重要特点是,它能够确定根的区间范围,而不仅仅是一个单一的数值解。
这给出了更多的信息,特别是当函数存在多个根点或根点存在不确定性时,区间牛顿法可以帮助我们确定根的位置和可能范围。
然而,需要注意的是,区间牛顿法在一些情况下可能会产生较为保守的结果,导致根的范围过大。
因此,在使用区间牛顿法时,需要权衡精确性和计算效率,并了解其适用性和局限性。
当使用区间牛顿法时,可以考虑以下几点:1. 初始区间的选择:初始区间应该尽可能紧密地包含函数的根。
一个较好的策略是使用先验知识来预估根的位置,并构建一个合适的初始区间。
如果没有先验知识,可以尝试使用函数在整个定义域的上下界来构造初始区间。
2. 区间运算规则:在每次迭代中,使用区间运算规则来计算函数在当前区间的导数和函数值。
常见的区间运算规则包括区间加法、减法、乘法和除法。
这些规则可以确保计算的结果仍然是一个包含了解的区间。
3. 区间收缩策略:在每次迭代中,根据计算得到的区间结果,采取合适的策略来缩小搜索的区间范围。
一种常用的策略是选择包含函数值与零之间的交点的子区间作为下一次迭代的区间。
4. 终止条件的设定:需要定义一个适当的终止条件来判断何时停止迭代。
c语言牛顿迭代法牛顿迭代法(Newton-Raphson法)是一种求解方程近似解的方法,它是利用泰勒级数展开函数在某点的值,然后用一阶泰勒展开式的根近似表示函数的零点,因此也被称为牛顿拉弗森法。
它可以高效地解决复杂的非线性方程组,是科学计算领域中最为常用和基础的方法之一。
牛顿迭代法的基本思想是:在第k次迭代时,求出曲线f(x)在点xk的一次导数斜率,以此确定x轴上的一个点xk+1,和该点处曲线的一次切线。
这条切线和x轴交点的横坐标就是极值点的估计值。
这个过程可以迭代多次,直到达到满足一定的误差精度或者迭代次数的要求。
C语言实现牛顿迭代法需要先定义一个函数,这个函数就是需要求解方程的函数。
定义完函数之后,需要实现牛顿迭代公式来求出下一次迭代的估计值,然后不断迭代。
具体实现过程如下:1. 定义函数f(x),即需要求解方程的函数。
2. 定义函数f_prime(x),即f(x)的一次导数。
3. 定义变量x和x_next,初始化它们的值。
4. 在循环中,首先计算f(x)和f_prime(x),然后计算下一个迭代点的估计值x_next = x - f(x) / f_prime(x)。
5. 如果x_next和x的差异满足预设的精度要求,则退出循环。
6. 否则,将x_next的值赋值给x,并重复执行第4步。
C语言实现牛顿迭代法的代码如下:#include <stdio.h>#include <math.h>定义函数f(x)double f(double x) {return x * x - 2;}定义函数f_prime(x)double f_prime(double x) {return 2 * x;}int main() {定义变量double x, x_next, epsilon;int iter;初始化变量x = 1.0;epsilon = 1e-6;iter = 0;迭代求解do {x_next = x - f(x) / f_prime(x);iter++;printf("Iteration %d: x = %lf\n", iter, x_next);x = x_next;} while (fabs(x_next - x) >= epsilon);输出结果printf("Final result: x = %lf\n", x);return 0;}在这个代码中,我们使用了do-while循环来不断执行迭代过程,直到达到预设的精度要求。
求解非线性方程的三种新的迭代法1. 引言1.1 介绍迭代法迭代法是一种重要的数值计算方法,广泛应用于非线性方程的求解、函数极值点的求解等问题中。
迭代法的基本思想是通过逐步逼近的方式,找到函数的根或者极值点。
这种方法在面对复杂的数学问题时具有很大的优势,可以通过简单的计算步骤逐渐接近最终解。
与解析解相比,迭代法更适用于无法通过代数运算求解的问题,或者求解过程较为繁琐的问题。
迭代法的实现通常需要选择一个初始值,并通过反复迭代计算来逼近真实解。
在每一步迭代中,都会根据当前的估计值计算新的估计值,直到满足一定的精度要求为止。
迭代法虽然不能保证每次都能得到精确解,但在实际应用中往往能够取得较好的结果。
迭代法是一种简单而有效的数值计算方法,尤其适用于非线性方程求解等复杂问题。
通过逐步逼近的方式,迭代法可以帮助我们解决那些传统方法难以处理的问题,为现代科学技术的发展提供重要支持。
1.2 非线性方程的求解意义非线性方程在数学和工程领域中广泛存在,其求解具有重要的理论和实际意义。
非线性方程的求解能够帮助解释和预测许多自然现象,包括流体动力学、电路分析、材料力学等领域中的问题。
非线性方程的求解也是许多科学研究和工程设计中必不可少的一环,例如在经济学、生物学、物理学等多个学科中都有非线性方程存在。
传统的解析方法难以解决非线性方程,因此迭代法成为求解非线性方程的重要工具。
迭代法是一种通过不断逼近解的方法,逐步逼近方程的解。
通过迭代法,可以在复杂的非线性方程中找到数值解,从而解决实际问题。
非线性方程的求解意义在于帮助我们更好地理解和掌握复杂系统的性质和行为。
通过求解非线性方程,我们可以揭示系统中隐藏的规律和关系,为科学研究和工程设计提供重要的参考和支持。
发展高效的迭代法求解非线性方程具有重要意义,可以推动科学技术的进步,促进社会的发展和进步。
2. 正文2.1 牛顿迭代法牛顿迭代法是一种非常经典的求解非线性方程的方法,其基本思想是通过不断逼近函数的零点来求解方程。
求解非线性方程的三种新的迭代法求解非线性方程是数学中一个重要且复杂的问题,对于很多实际问题的建模和计算都离不开对非线性方程的求解。
在数值计算中,我们通常使用迭代法来解决非线性方程,其中牛顿迭代法、割线法和试位法是常用的迭代方法。
除了这些传统的迭代法,近年来也出现了一些新的迭代方法,本文将介绍三种新的迭代法来求解非线性方程。
1. 定点迭代法定点迭代法是一种简单而又常用的迭代方法,它的基本思想是将原方程转化为一个等价的形式 x=g(x),其中函数 g(x) 称为迭代函数。
通过不断迭代计算,可以逐步逼近方程的根。
定点迭代法的关键在于选择合适的迭代函数 g(x),以保证收敛性和收敛速度。
近年来,有学者提出了一种基于自适应迭代函数的新的定点迭代法。
传统的定点迭代法通常需要提前选定一个迭代函数 g(x),而这个函数可能不是最优的。
自适应迭代函数的优势在于可以根据当前迭代点的情况自动调整迭代函数,以提高迭代的效率和收敛性。
加速迭代法是一种可以提高收敛速度的迭代方法,它的核心思想是通过一些技巧和技术手段来加快迭代的收敛速度。
传统的迭代法通常需要进行多次迭代才能到达精度要求,而加速迭代法可以在更少的迭代次数内达到相同的精度要求,从而提高了计算效率。
3. 自适应步长迭代法自适应步长迭代法是一种动态调整迭代步长的迭代方法,它可以根据当前迭代点的情况来自动调整迭代步长,以提高收敛速度和准确性。
传统的迭代方法通常使用固定的迭代步长,这可能导致迭代过程中出现震荡或者收敛速度过慢的情况。
而自适应步长迭代法可以根据迭代点的梯度信息来智能地调整步长,从而有效地克服了传统迭代方法的局限性。
总结在数值计算中,求解非线性方程是一个重要且复杂的问题。
传统的迭代方法如牛顿迭代法、割线法和试位法等在实际应用中已经得到了广泛的应用,但是它们也存在一些局限性,比如收敛速度慢、收敛性差等问题。
近年来,一些新的迭代方法如自适应迭代函数、基于神经网络的加速迭代法和基于深度学习的自适应步长迭代法等不断涌现,这些方法克服了传统迭代方法的一些局限性,具有更高的收敛速度和更好的收敛性能。
利⽤⽜顿迭代法求解⾮线性⽅程组最近⼀个哥们,是⽤⽜顿迭代法求解⼀个四变量⽅程组的最优解问题,从⽹上找了代码去改进,但是总会有点不如意的地⽅,迭代的次数过多,但是却没有提⾼精度,真是令⼈揪⼼!经分析,发现是这个⽅程组中存在很多局部的极值点,是⽤⽜顿迭代法不能不免进⼊局部极值的问题,更程序的初始值有关!发现⾃⼰好久没有是⽤Matlab了,顺便从⽹上查了查代码,⾃⼰来修改⼀下!先普及⼀下⽜顿迭代法:(来⾃百度百科)⽜顿(Newton's method)⼜称为⽜顿-拉夫逊(拉弗森)⽅法(Newton-Raphson method),它是在17世纪提出的⼀种在域和域上近似求解⽅程的⽅法。
多数⽅程不存在求根公式,因此求精确根⾮常困难,甚⾄不可能,从⽽寻找⽅程的近似根就显得特别重要。
⽅法使⽤函数f(x)的的前⾯⼏项来寻找⽅程f(x) = 0的根。
⽜顿迭代法是求⽅程根的重要⽅法之⼀,其最⼤优点是在⽅程f(x) = 0的单根附近具有平⽅收敛,⽽且该法还可以⽤来求⽅程的重根、复根,此时线性收敛,但是可通过⼀些⽅法变成超线性收敛。
另外该⽅法⼴泛⽤于计算机编程中。
设r是f(x)=0的根。
选取x0作为r的初始近似值,过点(x0,f(x0))做曲线的切线,求出该切线与x轴的交点,并求出该点的横坐标,称作x1是r 的⼀次近似。
如此就可以推导出⽜顿迭代公式。
已经证明,如果是的,并且待求的零点是孤⽴的,那么在零点周围存在⼀个区域,只要初始值位于这个邻近区域内,那么⽜顿法必定收敛。
并且,如果不为0, 那么⽜顿法将具有平⽅收敛的性能. 粗略的说,这意味着每迭代⼀次,⽜顿法结果的有效数字将增加⼀倍。
在⽹上查了⼀些代码,都是能指定某⼏个函数进⾏求导的,⽽且要是改变函数的个数,却⼜要对原始程序⼤动⼲⼽。
真的是揪⼼。
找到了这个程序,貌似在Matlab上不能很好的运⾏,对于数据的返回值为空没有做处理,后来⼜找了⼀个⽹易朋友的博客,将他的代码拿过来跑跑,还可以,但是对于不同的函数⽅程组,以及变量个数就不同了,真的是揪⼼,这个就是程序设计和编码的问题了!⾃⼰就拿来改了改,可以⽀持多⽅程组和多变量了!下⾯附上我的代码!求⼤家指导![python]1. function [r,n]=mulNewton(x0,funcMat,var,eps)2. % x0为两个变量的起始值,funcMat是两个⽅程,var为两个⽅程的两个变量,eps控制精度3. % ⽜顿迭代法解⼆元⾮线性⽅程组4. if nargin==05. x0 = [0.2,0.6];6. funcMat=[sym('(15*x1+10*x2)-((40-30*x1-10*x2)^2*(15-15*x1))*5e-4')...7. sym('(15*x1+10*x2)-((40-30*x1-10*x2)*(10-10*x2))*4e-2')];8. var=[sym('x1') sym('x2')];9. eps=1.0e-4;10. end11.12. n_Var = size(var,2);%变量的个数13. n_Func = size(funcMat,2);%函数的个数14. n_X = size(x0,2);%变量的个数15.16. if n_X ~= n_Var && n_X ~= n_Func17. fprintf('Expression Error!\n');18. exit(0);19. end20.21. r=x0-myf(x0, funcMat, var)*inv(dmyf(x0, funcMat, var));22. n=0;23. tol=1;24. while tol>=eps25. x0=r;26. r=x0-myf(x0, funcMat, var)*inv(dmyf(x0, funcMat, var));27. tol=norm(r-x0);28. n=n+1;29. if(n>100000)30. disp('迭代步数太多,⽅程可能不收敛');31. return;32. end33. end34. end % end mulNewton[python]1. function f=myf(x,funcMat, varMat)2. % 输⼊参数x为两个数值,func为1*2符号变量矩阵,var为1*2符号变量矩阵中的变量3. % 返回值为1*2矩阵,内容为数值4.5. n_X = size(x,2);%变量的个数6. f_Val = zeros(1,n_X);7. for i=1:n_X8. tmp_Var = cell(1,n_X);9. tmp_X = cell(1,n_X);10. for j=1:n_X11. tmp_Var{j} = varMat(1,j);12. tmp_X{j} = x(1,j);13. end14. f_Val(i) = subs(funcMat(1, i), tmp_Var, tmp_X);15. end16. f=f_Val;17. end % end myf[python]1. function df_val=dmyf(x, funcMat, varMat)2. % 返回值为2*2矩阵,内容为数值3. %df=[df1/x1, df1/x2;4. % df2/x1. df2/x2];5. n_X = size(x,2);%变量的个数6. df =cell(n_X, n_X);7. for i=1:n_X8. for j=1:n_X9. df{i,j} = diff(funcMat(1, i), varMat(1, j));10. end11. end12.13. df_val=zeros(n_X, n_X);14.15. for i=1:n_X16. for j=1:n_X17. tmp_Var = cell(1,n_X);18. tmp_X = cell(1,n_X);19. for k=1:n_X20. tmp_Var{k} = varMat(1,k);21. tmp_X{k} = x(1,k);22. end23. df_val(i,j) = subs(df{i,j}, tmp_Var, tmp_X);24. end25. end26. end % end dmyf。
Newton迭代法求解非线性方程一、 Newton 迭代法概述构造迭代函数的一条重要途径是用近似方程来代替原方程去求根。
因此,如果能将非线性方程f (x )=0用线性方程去代替,那么,求近似根问题就很容易解决,而且十分方便。
牛顿(Newton)法就是一种将非线性方程线化的一种方法。
设k x 是方程f (x )=0的一个近似根,把如果)(x f 在k x 处作一阶Taylor 展开,即:)x x )(x ('f )x (f )x (f k k k -+≈ (1-1)于是我们得到如下近似方程:0)x x )(x ('f )x (f k k k =-+ (1-2)设0)('≠k x f ,则方程的解为:x ̅=x k +f(x k )f(x k )́ (1-3)取x ~作为原方程(1.1)的新近似根1+k x ,即令: )x ('f )x (f x x k k k 1k -=+, k=0,1,2,… (1-4) 上式称为牛顿迭代格式。
用牛顿迭代格式求方程的根的方法就称为牛顿迭代法,简称牛顿法。
牛顿法具有明显的几何意义。
方程:)x x )(x ('f )x (f y k k k -+= (1-5) 是曲线)x (f y =上点))x (f ,x (k k 处的切线方程。
迭代格式(1-4)就是用切线式(1-5)的零点来代替曲线的零点。
正因为如此,牛顿法也称为切线法。
牛顿迭代法对单根至少是二阶局部收敛的,而对于重根是一阶局部收敛的。
一般来说,牛顿法对初值0x 的要求较高,初值足够靠近*x 时才能保证收敛。
若要保证初值在较大范围内收敛,则需对)x (f 加一些条件。
如果所加的条件不满足,而导致牛顿法不收敛时,则需对牛顿法作一些改时,即可以采用下面的迭代格式:)x ('f )x (f x x k k k 1k λ-=+,⋯=,2,1,0k (1-6)上式中,10<λ<,称为下山因子。
因此,用这种方法求方程的根,也称为牛顿下山法。
牛顿法对单根收敛速度快,但每迭代一次,除需计算)x (f k 之外,还要计算)x ('f k 的值。
如果)x (f 比较复杂,计算)x ('f k 的工作量就可能比较大。
为了避免计算导数值,我们可用差商来代替导数。
通常用如下几种方法: 1. 割线法 如果用1k k 1k k x x )x (f )x (f ----代替)x ('f k ,则得到割线法的迭代格式为:)x (f )x (f )x (f x x x x k 1k k 1k k k 1k --+---= (1-7)2. 拟牛顿法 如果用)x (f ))x (f x (f )x (f k 1k k k ---代替)x ('f k ,则得到拟牛顿法的迭代格式为:))x (f x (f )x (f )x (f x x 1k k k k 2k 1k -+---= (1-8) 3. Steffenson 法如果用)x (f )x (f ))x (f x (f k k k k -+代替)x ('f k ,则得到拟牛顿法的迭代格式为:)x (f ))x (f x (f )x (f x x k k k k 2k 1k -+-=+ (1-9) 二、 算法分析1. 割线法割线法的迭代公式为:)x (f )x (f )x (f x x x x k 1k k 1k k k 1k --+---=,k=0,1,2,…割线法是超线性收敛,其程序流程图为:2. 拟牛顿法牛顿拟迭代法迭代公式为:))x (f x (f )x (f )x (f x x 1k k k k 2k 1k -+---= (1) 对单根条件下,牛顿拟迭代法平方收敛,牛顿拟迭代法程序框图如下所示:(2) 对重根条件下,此时迭代公式修改为:))x (f x (f )x (f )x (f mx x 1k k k k 2k 1k -+---=,m 为根的重数 此时,牛顿迭代法至少平方收敛。
3. Steffenson 法Steffenson 迭代法程序流程图与牛顿拟迭代法类似。
三、 牛顿法的程序给定初值0p ,用牛顿法格式)p ('f )p (f p p 1k 1k 1k k ---=,⋯=,2,1k ,求解非线性方程0)x (f =。
*********************************************************************function [p1,err,k,y] = newton(f1041,df1041,p0,delta,max1) % f1041是非线性函数。
% df1041是f1041的微商。
% p0是初始值。
% delta 是给定允许误差。
% max1是迭代的最大次数。
% p1是牛顿法求得的方程的近似解。
% err 是p0的误差估计。
% k 是迭代次数。
% y = f(p1)p0, feval('f1041',p0) for k = 1:max1p1 = p0 - feval('f1041', p0)/feval('df1041', p0); err = abs(p1-p0); p0 = p1;p1, err, k, y = feval('f1041', p1) if (err < delta) | (y == 0),break, endp1, err, k, y = feval('f1041', p1) end*********************************************************************四、程序实例与计算结果例 用上述程序求方程0233=+-x x 的一个近似解,给定初值为1.2,误差界为610-。
解:先用m文件先定义二个名为f1041.m和df1041.m的函数文件。
function y = f1041(x)y = x^3 – 3*x + 2;function y=df1041(x)y=3*x^2-3;建立一个主程序prog1041.mclearnewton('f1041','df1041',1.2, 10^(-6), 18) 然后在MATLAB命令窗口运行上述主程序,即:>> prog1041计算结果如下:p0 = 1.2000 ans = 0.1280 p1 = 1.1030 err = 0.0970 k = 1y = 0.0329 p1 = 1.1030 err = 0.0970 k = 1y = 0.0329 p1 = 1.0524 err = 0.0507 k = 2y = 0.0084 p1 = 1.0524 err = 0.0507 k = 2y = 0.0084 p1 = 1.0264 err = 0.0260 k = 3y = 0.0021p1 = 1.0264 err = 0.0260 k = 3y = 0.0021p1 = 1.0133 err = 0.0131 k = 4y = 5.2963e-004 p1 = 1.0133 err = 0.0131 k = 4y = 5.2963e-004 p1 = 1.0066 err = 0.0066 k = 5y = 1.3270e-004p1 = 1.0066 err = 0.0066k = 5y = 1.3270e-004 p1 = 1.0033 err = 0.0033k = 6y = 3.3211e-005 p1 = 1.0033 err = 0.0033k = 6y = 3.3211e-005 p1 = 1.0017 err = 0.0017k = 7y = 8.3074e-006 p1 = 1.0017 err = 0.0017k = 7y = 8.3074e-006 p1 = 1.0008 err = 8.3157e-004 k = 8y = 2.0774e-006 p1 = 1.0008 err = 8.3157e-004 k = 8y = 2.0774e-006 p1 = 1.0004 err = 4.1596e-004 k = 9y = 5.1943e-007 p1 = 1.0004 err = 4.1596e-004 k = 9y = 5.1943e-007 p1 = 1.0002 err = 2.0802e-004 k = 10y = 1.2987e-007 p1 = 1.0002 err = 2.0802e-004 k = 10y = 1.2987e-007 p1 = 1.0001 err = 1.0402e-004 k = 11y = 3.2468e-008 p1 = 1.0001 err = 1.0402e-004 k = 11y = 3.2468e-008 p1 = 1.0001 err = 5.2014e-005 k = 12y = 8.1170e-009 p1 = 1.0001 err = 5.2014e-005 k = 12y = 8.1170e-009p1 = 1.0000 err = 2.6008e-005 k = 13y = 2.0293e-009 p1 = 1.0000 err = 2.6008e-005 k = 13y = 2.0293e-009 p1 = 1.0000 err = 1.3004e-005 k = 14y = 5.0732e-010 p1 = 1.0000 err = 1.3004e-005 k = 14y = 5.0732e-010 p1 = 1.0000 err = 6.5020e-006 k = 15y = 1.2683e-010 p1 = 1.0000 err = 6.5020e-006 k = 15 y = 1.2683e-010 p1 = 1.0000 err = 3.2510e-006 k = 16y = 3.1708e-011 p1 = 1.0000 err = 3.2510e-006 k = 16y = 3.1708e-011 p1 = 1.0000 err = 1.6255e-006 k = 17y = 7.9270e-012 p1 = 1.0000 err = 1.6255e-006 k = 17y = 7.9270e-012 p1 = 1.0000 err = 8.1277e-007 k = 18y = 1.9817e-012 ans = 1.0000这说明,经过18次迭代得到满足精度要求的值。