python机器人例程
- 格式:docx
- 大小:37.04 KB
- 文档页数:2
利用Python进行机器人控制和自动化任务Python是一种简洁、易学且功能强大的编程语言,被广泛使用于各种领域,包括机器人控制和自动化任务。
本文将介绍如何利用Python来实现机器人控制和自动化任务,包括基本概念、常用工具和实际案例。
一、机器人控制基础机器人控制是指通过编程来控制机器人执行各种任务。
在Python中,可以使用不同的库来实现机器人控制,如RPi.GPIO、pySerial等。
这些库提供了与机器人硬件交互的功能,如控制电机、读取传感器数据等。
1. 硬件连接与配置在开始机器人控制之前,需要先连接硬件设备,并进行相应的配置。
这可能涉及到电路连接、引脚映射等操作。
例如,如果使用树莓派控制机器人,可以通过GPIO引脚连接电机、传感器等设备,并在Python程序中通过引脚编号进行控制。
2. 控制命令与动作机器人控制的核心是发送控制命令以执行相应的动作。
比如,可以通过控制电机的转速和方向来实现机器人的前进、后退、转向等操作。
同时,还可以通过读取传感器数据来实现避障、寻线等功能。
在Python中,可以使用相应的库函数来发送控制命令,并通过循环控制实现持续的机器人运动。
二、自动化任务实现除了机器人控制,Python也可以用于自动化任务的实现。
自动化任务是指通过编程来自动执行繁琐、重复的任务,提高工作效率。
下面介绍几个常见的自动化任务案例。
1. 网络爬虫网络爬虫是指通过程序自动获取互联网上的信息。
Python提供了强大的网络爬虫库,如BeautifulSoup、Scrapy等。
通过这些库,可以编写程序来自动抓取网页内容、提取关键信息,并进行进一步的分析和处理。
2. 自动化测试自动化测试是指利用程序来自动检测软件系统的功能和质量。
Python提供了丰富的测试框架,如unittest、pytest等。
通过这些框架,可以编写测试脚本来自动执行测试用例、生成测试报告,并进行断言和异常处理。
3. 数据处理与分析Python在数据处理和分析方面有着广泛的应用。
实现机器人走动的python代码机器人是现代科技的重要成果,它们可以执行重复性的任务,从而帮助人们提高生产效率和改善生活质量。
而要实现机器人的走动,编写Python代码是一个不错的选择。
首先,你需要了解机器人的基本结构和行走原理,以便更好地编写代码。
机器人通常由机身、电机、轮子等部分组成,其行走原理基于电机驱动轮子的运动。
接下来,你需要使用Python的turtle模块来模拟机器人的运动。
使用turtle模块可以让你轻松地在屏幕上绘制图形,从而模拟机器人的行走轨迹。
下面是一个简单的Python代码示例,实现机器人的走动:```pythonimport turtle# 设置画布大小turtle.setup(800, 600)# 设置机器人的起始位置turtle.penup()turtle.goto(0, 0)turtle.pendown()# 定义机器人的行走函数def robot_walk():turtle.forward(50)turtle.right(90)turtle.forward(50)turtle.left(90)# 控制机器人行走for i in range(4):robot_walk()# 结束程序turtle.done()```在这段代码中,我们首先使用turtle.setup()函数设置画布大小为800x600,然后使用turtle.penup()和turtle.goto()函数将机器人移动到起始位置。
接下来,我们定义了一个名为robot_walk()的函数,它定义了机器人如何行走。
在这个函数中,我们使用turtle.forward()和turtle.right()等函数来控制机器人的行动,让它向前移动50个像素,然后向右转90度,再向前移动50个像素,最后向左转90度。
最后,在主程序中,我们使用for循环控制机器人行走4次,每次调用robot_walk()函数。
最后,使用turtle.done()函数结束程序。
ur机械臂识别抓取物体python例程-回复问题,并提供相关资料与示例代码。
题目:ur机械臂识别抓取物体Python例程正文:引言:随着机器人技术的发展和应用需求的不断增长,机械臂在工业、医疗、服务等领域中被广泛应用。
而机械臂的功能主要由其控制算法和感知能力决定,其中机械臂的识别抓取物体功能是其中关键的一部分。
本文将介绍一种使用Python语言编写的ur机械臂识别和抓取物体的例程。
步骤一:安装必要的软件和库在开始编写ur机械臂识别抓取物体的例程之前,我们需要安装相关的软件和库。
在这个例程中,我们将使用到下列软件和库:- Python 2.7或以上的版本- UR5机械臂- ROS(Robot Operating System):提供了一系列的开源软件库和工具,用于构建机器人应用程序。
- MoveIt!:用于机械臂运动规划和控制的ROS软件包。
- OpenCV:用于图像处理和计算机视觉任务的常用库。
步骤二:设置机器人和环境在开始编写代码之前,我们需要确保机械臂的硬件和环境设置正确。
首先,确保机械臂的硬件连接和电源供应正常。
然后,在ROS中设置机械臂的URDF(Unified Robot Description Format)模型,这个模型描述了机械臂的几何和运动学信息。
最后,配置MoveIt!和OpenCV的相关参数和配置文件。
步骤三:编写识别抓取物体的Python例程在编写代码之前,我们需要先了解UR5机械臂的基本运动控制和MoveIt!库的使用。
这里假设您已经熟悉ROS和Python的基本语法。
首先,我们导入需要的库和模块:pythonimport rospyimport cv2from sensor_msgs.msg import Imagefrom cv_bridge import CvBridge, CvBridgeError然后,我们定义一个类并初始化相关参数:pythonclass ObjectDetection:def __init__(self):self.bridge = CvBridge()self.image_sub =rospy.Subscriber("/camera/rgb/image_raw", Image,self.image_callback)def image_callback(self, data):try:cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")# 在这里编写图像处理和物体识别的代码except CvBridgeError as e:print(e)下一步,我们需要编写图像处理和物体识别的代码。
python实现nao机器⼈⾝体躯⼲和腿部动作操作本⽂实例为⼤家分享了python实现nao机器⼈⾝体躯⼲和腿部动作的具体代码,供⼤家参考,具体内容如下跟类似,代码没什么难度,可以进⾏扩展。
#-*-encoding:UTF-8-*-'''control nao's left foot,cartesian control:torso and foot trajectories'''import sysimport motionfrom naoqi import ALProxydef StiffnessOn(proxy):pNmaes="Body"pStiffnessLists=1.0pTimeLists=1.0proxy.stiffnessInterpolation(pName,pStiffnessLists,pTimeLists)def main(robotIP):'''example of cartesian foot trajectory'''try :motionProxy=ALProxy("ALMotion",robotIP,9559)except Exception,e:print "could not create a proxy"print "error is ",etry:postureProxy=ALProxy("ALRobotPosture",robotIP,9559)except Exception ,e:print "could not create a proxy"print"error is",eStiffnessOn(motionProxy)#send nao to pose initpostureProxy.goToPosture("StandInit",0.5)space=motion .FRAME_ROBOTAxisMask=almath.AXIS_MASK_VELisAbsolute=Falsepath=[0.0,-0.07,-0.03,0.0,0.0,0.0]#lower the torso and move the sizeeffector="Torso"time=2.0motionProxy.positionInterpolation(effector,space,path,axisMask,time,isAbsolute)#lleg motioneffector="LLeg"path=[0.0,0.06,0.00,0.0,0.0,0.0]times=2.0motionProxy.positionInterpolation(effector,space,axisMask,time,isAbsolute)if __name__=="__main__":robotIP="127.0.0.1"if len(sys.argv)<=1:print "usage python robotIP"else:robotIP=sys.argv[1]main(robotIP)以上就是本⽂的全部内容,希望对⼤家的学习有所帮助,也希望⼤家多多⽀持。
Python机器人编程实例解析Python是一种广泛应用于机器人编程的高级编程语言。
它具有简洁灵活的语法、丰富的库函数和强大的生态系统,使其成为机器人开发领域中的重要工具。
本文将通过解析几个Python机器人编程实例,展示Python在机器人领域的应用以及相关的技术细节。
一、小车避障实例我们首先来看一个小车避障的实例。
该实例使用Python编程语言结合适配的硬件设备,实现了一个智能小车能够在遇到障碍物时自动避让的功能。
在这个实例中,利用Python的GPIO库来控制小车的电机,利用超声波传感器来检测前方的障碍物距离,从而实现自动避障的功能。
二、机械臂控制实例接下来,我们介绍一个机械臂控制的实例。
该实例利用Python编程语言结合适配的硬件设备,实现了一个能够自动完成一系列动作的机械臂。
在这个实例中,利用Python的串口通信库与机械臂进行通信,通过发送指令来控制机械臂的各个关节,从而实现灵活的运动控制。
三、图像识别实例另一个有趣的机器人编程实例是图像识别。
利用Python的机器学习库和计算机视觉库,我们可以实现机器人对环境中图像的分析和理解。
例如,我们可以编写一个程序,使机器人能够识别人脸、颜色、物体等,并作出相应的反应。
这个实例展示了Python在机器人智能感知方面的强大能力。
四、声控机器人实例最后,我们介绍一个声控机器人的实例。
该实例利用Python的语音处理库和语音识别库,实现了一个能够通过声音指令进行控制的机器人。
通过录制声音、识别声音指令,并将其转化为对机器人的控制动作,实现了使用声音来操控机器人的功能。
这个实例显示了Python在机器人交互性方面的优势。
结论通过对以上几个Python机器人编程实例的解析,我们可以清晰地看到Python在机器人领域中的广泛应用。
Python的简洁灵活、强大的生态系统以及丰富的库函数,使其成为机器人开发的理想选择。
无论是小车避障、机械臂控制、图像识别还是声控机器人,Python都展现了出色的表现。

本文以新松SR10C型号机器人为例,建立简单的物体抓取仿真模型,所用物体为圆柱体,所用手爪为Schunk的PZN-plus_100_1。
该实例的操作过程如下:一、建立仿真场景建立仿真场景,即是将各组件(机器人,手爪,工件)拖拽到软件界面中,并进行装配组合,调整到合适的位置。
•常用Items by Type(按种类分)进行组件选取具体方法:Items by Type → Robots → Siasun → SR10C,然后双击或者鼠标按住SR10C拖拽到合适的位置。
注意:双击的作用是将机器人放置到场景中[0, 0, 0]的位置,拖拽的作用可以将机器人放置到场景中任意的位置(根据实际情况需要)。
•将末端执行器—手爪拖拽到场景中具体办法:Items by Type → Tools → Schunk → PZN-plus_100_1。
•将手爪装配到机器人上。
一般来讲,当你将手爪拖拽到场景中后,手爪默认是选中状态,此时你可以自由移动手爪,至机器人末端位置,当手爪靠近机器人末端位置的时候,会自动识别装配关系(出现绿色一条线),此时继续移动到实际的装配位置,松开鼠标,两者就会自动装配上。
注意:有些时候,会因为一些原因,导致手爪没有选中,故而不能移动手爪进行装配。
此时,解决办法为:点击Select → 选中手爪(呈红色)→ 点击PnP,此时再按住鼠标就可以移动手爪了。
•选择工件具体步骤:Items by Type → Basic Shapes → Visual Components → CylinderGeo。
•调整各组件至合适的位置具体方法:Select(选择机器人)→ Trans(下方会显示机器人目前的坐标值)→修改下方的坐标值为[0, 0, 0]。
同样的方法,调整圆柱体至[1000, 0, 0]的位置。
注意:圆柱体需要位于机器人工作空间内,方可实现抓取动作,判断是否位于工作空间的办法:Select(选择机器人)→ Param → Workspace → 选择Profile 和Envelope,即可判断。
如何用Python编写一个简单的聊天机器人聊天机器人是一种能够模拟人类对话的人工智能程序。
它可以通过自然语言处理和模式识别技术与用户进行对话,并根据用户的输入提供相应的回答或建议。
在本文中,我将介绍如何使用Python编写一个简单的聊天机器人。
1. 准备工作在开始编写聊天机器人之前,首先需要安装Python和一些必要的第三方库。
可以使用pip命令来安装以下库:nltk、numpy和sklearn。
2. 数据预处理在构建聊天机器人之前,需要准备一些用于训练的数据。
可以收集自然语言处理相关的数据集,也可以自己制作一个简单的数据集。
数据集应包含一系列问题和对应的回答。
3. 文本分词和特征提取数据预处理的第一步是将文本进行分词处理。
可以使用NLTK库中的分词器来实现。
分词后,需要对每个词语进行特征提取,并构建特征向量。
可以使用词袋模型或TF-IDF模型来提取特征。
4. 构建模型在特征提取完成后,可以使用机器学习算法来构建聊天机器人模型。
可以选择使用朴素贝叶斯分类器、支持向量机或神经网络等算法。
5. 训练模型在构建模型之后,需要通过使用数据集来训练模型。
可以将数据集分为训练集和测试集,使用训练集来训练模型,使用测试集来评估模型的准确性。
6. 实时聊天在完成模型的训练后,可以将其部署到应用程序中,实现实时聊天功能。
可以使用用户输入的问题作为模型的输入,并根据模型的预测结果生成回答。
下面是用Python编写一个简单的聊天机器人的示例代码:```pythonimport nltkimport numpy as npfrom sklearn.feature_extraction.text import TfidfVectorizerfrom sklearn.naive_bayes import MultinomialNBfrom sklearn.pipeline import make_pipeline# 准备数据集questions = ['How are you?', 'What is your name?', 'What is the weather today?']answers = ['I am fine.', 'My name is Chatbot.', 'It is sunny.']# 文本分词和特征提取tokenizer = nltk.tokenize.RegexpTokenizer(r'\w+')vectorizer = TfidfVectorizer(tokenizer=tokenizer.tokenize)X = vectorizer.fit_transform(questions).toarray()y = np.array(answers)# 构建模型model = make_pipeline(TfidfVectorizer(tokenizer=tokenizer.tokenize), MultinomialNB())# 训练模型model.fit(questions, answers)# 实时聊天while True:question = input('User: ')prediction = model.predict([question])print('Chatbot:', prediction[0])```通过上述代码,可以实现一个简单的聊天机器人。
用Python实现机器人控制与自动化Python是一种功能强大的编程语言,广泛应用于机器人控制与自动化领域。
本文将详细介绍如何使用Python语言来实现机器人控制与自动化。
一、机器人控制1. 机器人基本概念机器人是指能够自主运动和执行任务的智能设备。
在机器人控制中,我们需要使用编程语言来控制机器人的运动、转向以及执行任务等功能。
2. Python机器人库Python提供了许多机器人库,例如Gazebo、ROS等。
通过使用这些库,我们可以方便地控制机器人的运动和执行任务。
3. 机器人运动控制机器人的运动控制通常包括位置控制和速度控制两种方式。
使用Python编程语言,我们可以利用机器人库提供的API来实现机器人的运动控制。
4. 机器人任务执行机器人控制不仅包括运动控制,还涉及到执行特定任务,如抓取、放置物体等。
Python提供了丰富的库来实现机器人任务的自动化执行,如OpenCV、TensorFlow等。
二、自动化1. 自动化基本概念自动化是指利用计算机和控制技术来实现对工业、生活等领域的自动控制和操作。
Python作为一种通用编程语言,可以应用于各种自动化场景。
2. 自动化领域案例在自动化领域,Python的应用非常广泛。
例如,可以使用Python编写脚本来实现网络设备的自动化配置、服务器的自动化部署、工业生产线的自动化控制等。
3. 自动化任务实现使用Python编程语言,我们可以利用其强大的库和框架来实现各种自动化任务。
例如,使用Selenium库可以实现Web自动化测试,使用PyAutoGUI库可以实现图形界面的自动化操作。
4. 自动化脚本编写Python提供了简洁易懂的语法和丰富的库,使得编写自动化脚本变得简单而高效。
通过编写Python脚本,我们可以实现各种自动化任务的流程控制、数据处理和结果输出等功能。
三、总结Python语言在机器人控制与自动化领域有着广泛的应用。
通过使用Python编程语言,我们可以方便地实现机器人的运动控制和任务执行,同时还可以应用于各种自动化场景。
主题:Python机器人构建用例Python机器人构建用例已经成为了软件测试领域中不可或缺的一部分。
Python语言具有简单易学、功能强大、开源和丰富的社区支持等特点,使得它成为了构建机器人用例的首选语言之一。
在本文中,我们将讨论Python机器人构建用例的相关内容,包括其优势、应用场景、构建步骤和案例分析等。
1. Python机器人构建用例的优势Python语言具有简单易学、功能强大、开源和丰富的社区支持等优势,使得它成为了构建机器人用例的首选语言之一。
相比于其他语言,Python具有更加优雅的语法和更加丰富的标准库,使得编写机器人用例变得更加简单和高效。
Python还支持多种测试框架和第三方库,使得构建用例的灵活性和可扩展性大大提升。
2. Python机器人构建用例的应用场景Python机器人构建用例广泛应用于软件测试、自动化测试、持续集成等领域。
在软件测试中,通过使用Python机器人构建用便可以快速、高效地对软件进行功能测试、性能测试、接口测试等。
在自动化测试中,Python机器人构建用例可以帮助测试人员更加轻松地实现自动化脚本的编写和执行,从而提高测试效率和质量。
在持续集成中,Python机器人构建用例可以与各种版本控制、构建工具和持续集成工具无缝集成,为软件开发流程带来更加便利的测试支持。
3. Python机器人构建用例的构建步骤构建Python机器人用例的步骤主要包括环境搭建、代码编写、测试运行和结果分析等。
需要搭建Python运行环境,并安装相应的测试框架和第三方库。
根据实际需求编写Python机器人用例的代码,包括测试用例的输入、执行和断言等。
通过测试运行,检查测试结果并进行分析,从而评估测试的效果和质量。
根据分析结果对代码进行修改和优化,以实现更加高效和稳定的测试。
4. Python机器人构建用例的案例分析以某软件的功能测试为例,我们通过Python机器人构建用例的方式对该软件进行功能测试。
Python中的人工智能应用案例人工智能(Artificial Intelligence,简称AI)作为一种新兴的技术,正在深刻地改变着我们的生活和工作方式。
而在众多人工智能技术中,Python作为一种强大而灵活的编程语言,成为了人工智能领域中广泛应用的首选。
本文将介绍Python中几个具有代表性的人工智能应用案例,展示其在不同领域中的重要性和应用价值。
一、自然语言处理(Natural Language Processing,简称NLP)自然语言处理是指计算机对人类自然语言的理解和处理能力。
Python中的多个NLP库和工具使得处理文本数据变得简单高效。
例如,Python的NLTK(Natural Language Toolkit)库提供了丰富的文本处理工具,如分词、词性标注、命名实体识别等。
利用Python的NLP库,我们可以实现智能对话机器人、情感分析、文本生成等功能,大大提升了人机交互的效果。
二、图像识别(Image Recognition)图像识别是指计算机通过对图像进行分析和学习,从而实现对图像中各个元素的识别和分类的能力。
Python中的深度学习框架TensorFlow和PyTorch,以及图像处理库OpenCV等,为图像识别提供了强大的支持。
通过Python编程,我们可以训练神经网络模型进行图像分类、物体检测、人脸识别等任务,实现自动驾驶、安防监控等应用。
三、预测分析(Predictive Analytics)预测分析是指根据过去的数据和统计算法,对未来事件的发生和结果进行预测的过程。
Python中的数据分析库(如NumPy、Pandas)和机器学习库(如Scikit-learn)提供了丰富的预测建模工具,使得预测分析变得更加简便。
利用Python进行预测分析,我们可以构建销售预测模型、临床数据分析等,帮助企业做出更准确的决策和计划。
四、推荐系统(Recommendation System)推荐系统是指根据用户的行为模式和个人兴趣,提供个性化的推荐服务的系统。
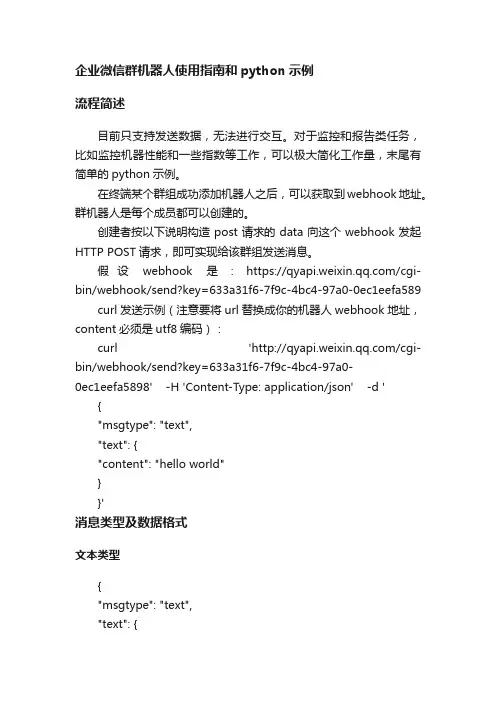
企业微信群机器人使用指南和python示例流程简述目前只支持发送数据,无法进行交互。
对于监控和报告类任务,比如监控机器性能和一些指数等工作,可以极大简化工作量,末尾有简单的python示例。
在终端某个群组成功添加机器人之后,可以获取到webhook地址。
群机器人是每个成员都可以创建的。
创建者按以下说明构造post请求的data向这个webhook发起HTTP POST请求,即可实现给该群组发送消息。
假设webhook是:https:///cgi-bin/webhook/send?key=633a31f6-7f9c-4bc4-97a0-0ec1eefa589 curl发送示例(注意要将url替换成你的机器人webhook地址,content必须是utf8编码):curl '/cgi-bin/webhook/send?key=633a31f6-7f9c-4bc4-97a0-0ec1eefa5898' -H 'Content-Type: application/json' -d ' {"msgtype": "text","text": {"content": "hello world"}}'消息类型及数据格式文本类型{"msgtype": "text","text": {"content": "广州今日天气:29度,大部分多云,降雨概率:60%","mentioned_list":["wangqing","@all"],"mentioned_mobile_list":["138****1111","@all"]}}参数必须 说明 msgtypetrue 消息类型,此时固定为text contenttrue 文本内容,最长不超过2048个字节,必须是utf8编码 mentioned_list false userid 的列表,提醒群中的指定成员(@某个成员),@all 表示提醒所有人。
python wxbot 使用案例Python wxbot 是一个基于 Python 的微信机器人开发框架,可以实现自动登录微信、接收和发送消息、管理好友和群组等功能。
下面是使用 wxbot 的一些案例:1. 自动回复消息使用 wxbot 可以实现自动回复消息的功能。
可以根据接收到的消息内容,自动回复一些预设好的消息。
比如,当收到"你好"时,自动回复"你好,我是机器人。
"。
2. 群聊监控wxbot 可以监控指定的微信群聊,当有新消息时,自动将消息内容发送到指定的邮箱或者其他通信工具,实现实时监控群聊的功能。
3. 定时发送消息使用 wxbot 可以定时发送消息,比如每天早上8点发送"早上好",每天晚上10点发送"晚安"。
可以用于提醒自己或者发送定时任务等。
4. 自动添加好友wxbot 可以根据一些预设的规则,自动添加好友。
比如可以根据关键词搜索,自动添加与关键词相关的人为好友。
5. 自动拉群使用 wxbot 可以自动拉群,比如根据某个群的特定规则,自动将符合规则的用户拉入到该群中。
6. 微信群机器人wxbot 可以实现微信群聊机器人的功能,比如可以对指定的群聊进行管理,自动回复消息,发送定时任务等。
7. 自动抢红包使用 wxbot 可以实现自动抢微信红包的功能。
可以根据收到的红包消息,自动点击并领取红包。
8. 聊天机器人可以利用 wxbot 开发一个聊天机器人,实现与用户的自动聊天功能。
可以使用自然语言处理技术,使机器人能够理解并回复用户的消息。
9. 自动发送文件使用 wxbot 可以实现自动发送文件的功能。
可以根据预设的规则,自动发送指定的文件给指定的用户。
10. 自动点赞利用 wxbot 可以实现自动点赞的功能。
可以根据一些规则,自动给指定的好友或者群组发送点赞消息。
以上是使用 wxbot 的一些案例,通过利用 wxbot 的功能,可以实现自动化处理微信消息、管理好友和群组等操作,提高工作效率。
python实现微信机器⼈:登录微信、消息接收、⾃动回复功能安装wxpypip install -U wxpy登录微信# 导⼊模块from wxpy import *# 初始化机器⼈,扫码登陆bot = Bot()运⾏以上代码,会⽣成⼀个⼆维码,通过图⽚扫描⼆维码即可登录微信。
如果是在服务器上运⾏代码,⽆法显⽰图⽚的时候,可以选择通过终端显⽰⼆维码图⽚,只需要将代码改成:from wxpy import *bot = Bot(console_qr=True)运⾏的效果如下:当然,为了安全,这个⼆维码做了模糊处理如果你认为每次都需要扫描⼆维码很⿇烦,可以启⽤缓存,来保存⾃⼰的登录状态:bot = Bot(console_qr=True, cache_path=True)发送消息⾸先我们尝试给⾃⼰和⽂件传输助⼿发消息:# 给机器⼈⾃⼰发送消息bot.self.send('Hello World!')# 给⽂件传输助⼿发送消息bot.file_helper.send('Hello World!')⾃动回复可通过预先注册的⽅式,实现消息的⾃动处理。
“预先注册” 是指预先将特定聊天对象的特定类型消息,注册到对应的处理函数,以实现⾃动回复等功能。
注册消息提⽰每当收到新消息时,将根据注册规则找到匹配条件的执⾏函数。
并将消息对象作为唯⼀参数传⼊该函数。
将 Bot.register() 作为函数的装饰器,即可完成注册。
# 获取所有类型的消息(好友消息、群聊、公众号,不包括任何⾃⼰发送的消息)# 并将获得的消息打印到控制台@bot.register()def print_others(msg):print(msg)同时wxpy也可以给注册消息的类型加上限制,# 回复 my_friend 发送的消息@bot.register(my_friend)def reply_my_friend(msg):return 'received: {} ({})'.format(msg.text, msg.type)# 回复发送给⾃⼰的消息,可以使⽤这个⽅法来进⾏测试机器⼈⽽不影响到他⼈@bot.register(bot.self, except_self=False)def reply_self(msg):return 'received: {} ({})'.format(msg.text, msg.type)# 打印出所有群聊中@⾃⼰的⽂本消息,并⾃动回复相同内容# 这条注册消息是我们构建群聊机器⼈的基础@bot.register(Group, TEXT)def print_group_msg(msg):if msg.is_at:print(msg)msg.reply(meg.text)我们设置⼀个⾃动回复所有消息的功能:@bot.register()def reply_self(msg):# return 'received: {} ({})'.format(msg.text, msg.type)msg.reply(u'好的呀')效果如下:以上所述是⼩编给⼤家介绍的python实现微信机器⼈:登录微信、消息接收、⾃动回复功能详解整合,希望对⼤家有所帮助,如果⼤家有任何疑问请给我留⾔,⼩编会及时回复⼤家的。
Python技术中的机器人控制与编程案例解析在Python技术中,机器人控制与编程是一个引人注目的话题。
随着人工智能和机器人技术的快速发展,越来越多的人开始关注如何使用Python来控制和编程机器人。
本文将通过解析一些典型的机器人控制与编程案例,探讨Python在机器人领域的应用。
首先,我们来看一个简单的机器人控制案例。
假设我们有一个小型的遥控车机器人,希望用Python来控制它前进、后退、左转和右转。
首先,我们需要连接机器人到计算机。
可以通过串口或者WiFi连接方式实现。
然后,我们可以使用Python的串口通信库或者网络通信库来与机器人进行通信。
通过发送一些特定的命令和数据,可以控制机器人的运动。
例如,发送一个前进命令,机器人就会前进;发送一个左转命令,机器人就会向左转。
通过不同的组合命令,我们可以实现各种运动模式,从简单的直线运动到复杂的曲线运动。
接下来,让我们看一个更复杂的机器人编程案例。
假设我们有一个具备视觉感知能力的机器人,希望用Python编程实现它的自主导航。
首先,我们需要将机器人上的摄像头与计算机连接。
然后,我们可以使用Python的图像处理库来获取图像数据,并进行一些图像处理操作,例如目标检测、目标跟踪等。
通过分析图像数据,我们可以确定机器人周围的环境信息,例如障碍物的位置和形状。
接下来,我们可以使用一些路径规划算法,例如A*算法或者Dijkstra算法,利用图像数据中的环境信息来生成路径。
最后,我们可以使用Python的机器人控制库来控制机器人根据生成的路径进行导航。
除了控制和编程机器人之外,Python还可以用于机器人的感知和决策过程。
例如,我们可以使用Python的机器学习库来训练机器人的视觉模型,以提高目标检测和目标识别的准确性。
我们可以使用各种机器学习算法,例如卷积神经网络(CNN)和支持向量机(SVM),来训练机器人的模型。
一旦模型训练完成,我们可以将其应用于实际机器人的视觉感知过程中,从而提高机器人的自主决策能力。
Python与自动化机器人使用Python构建自动化机器人系统Python与自动化机器人使用Python构建自动化机器人系统自动化机器人系统在现代社会中扮演着越来越重要的角色。
它们能够执行一系列复杂的任务,如生产线上的组装和包装,仓库的自动化管理,甚至是无人驾驶汽车。
Python作为一种强大而灵活的编程语言,被广泛应用于构建自动化机器人系统。
本文将介绍使用Python构建自动化机器人系统的一些关键技术和应用。
一、传感器与数据采集在构建自动化机器人系统时,传感器和数据采集是至关重要的。
它们能够通过感知环境中的物理量和状态来提供输入数据。
Python提供了丰富的库和工具,用于与各种传感器进行交互并进行数据采集。
例如,使用Python的RPi.GPIO库可以与树莓派上的GPIO接口进行交互,实现与各种传感器(如温度传感器、加速度传感器等)的连接和数据采集。
二、决策与控制算法决策与控制算法是自动化机器人系统的核心。
Python提供了强大的科学计算库和机器学习工具,可以帮助开发人员实现各种决策与控制算法。
例如,使用Python的NumPy和SciPy库可以进行矩阵运算和科学计算,使用机器学习库如TensorFlow和PyTorch可以实现神经网络算法和深度学习模型。
这些工具和库使得开发人员能够轻松地设计和实现自动化机器人系统的决策与控制算法。
三、通信与协作在自动化机器人系统中,机器人通常需要与其他机器人或控制系统进行通信和协作。
Python提供了众多的库和工具,用于实现机器人之间的通信和协作。
例如,使用Python的Socket库可以实现机器人之间的网络通信,使用ROS(Robot Operating System)可以实现机器人之间的协作和消息传递。
这些通信与协作工具为自动化机器人系统的开发和应用提供了便利。
四、动作执行与反馈自动化机器人系统最终需要执行各种动作和任务,并根据执行结果进行反馈和调整。
Python的强大功能使得开发人员能够实现机器人的动作执行和反馈控制。
python机器人例程
Python机器人例程是一种让机器人自动执行任务的程序。
这些任务可以是简单的任务,如在固定的时间点开启或关闭机器人,或者是更复杂的任务,如识别图像并进行相应的操作。
在这篇文章中,我们将分步骤阐述Python机器人例程的实现方法。
步骤一:安装所需软件
在使用Python机器人例程之前,需要安装以下软件:
1. Python
2. Python机器视觉库OpenCV
3. 机器人控制软件
步骤二:编写Python代码
下面是一个简单的Python机器人例程代码示例:
```python
import cv2
import robot_control
# 初始化机器人控制软件
robot_control.init()
# 启动机器人
robot_control.start()
# 打开摄像头
cap = cv2.VideoCapture(0)
# 循环读取摄像头图像
while(True):
# 获取一帧图像
ret, frame = cap.read()
# 显示图像
cv2.imshow('frame',frame)
# 处理图像
# ...
# 按下q键退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放资源
cap.release()
cv2.destroyAllWindows()
robot_control.stop()
```
在这个例程中,我们使用OpenCV库来处理图像,并使用机器人
控制软件来控制机器人的运动。
在这个例程中,我们使用了以下函数:
1. `robot_control.init()` 初始化机器人控制软件
2. `robot_control.start()` 启动机器人
3. `robot_control.stop()` 停止机器人
4. `cv2.VideoCapture()` 打开摄像头
5. `cap.read()` 读取一帧图像
6. `cv2.imshow()` 显示图像
7. `cv2.waitKey()` 等待按键事件
8. `cv2.destroyAllWindows()` 关闭所有窗口
步骤三:调试和测试
在开发和测试的过程中,你可以使用调试工具来找到并修复技术
错误。
你还可以创建一些测试用例来测试你的代码并确保它能够按照
你的预期工作。
总结
Python机器人例程是许多自动化应用程序必不可少的一部分,它允许机器人自动执行任务,提高了工作效率,并且可以减少人工错误
的出现。
在这篇文章中,我们阐述了Python机器人例程的实现方法,
希望这对你有所帮助。