A 机器人的程序编程
- 格式:docx
- 大小:87.66 KB
- 文档页数:40
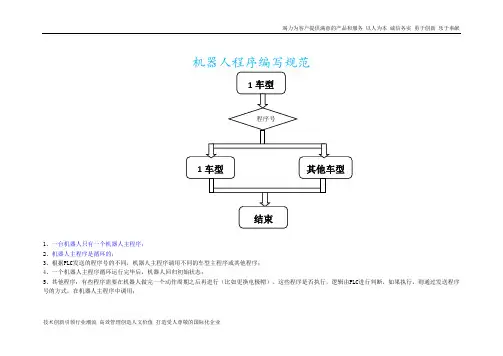
技术创新引领行业潮流 高效管理创造人文价值 打造受人尊敬的国际化企业机器人程序编写规范1、一台机器人只有一个机器人主程序;2、机器人主程序是循环的;3、根据PLC 发送的程序号的不同,机器人主程序调用不同的车型主程序或其他程序;4、一个机器人主程序循环运行完毕后,机器人回归初始状态;5、其他程序:有些程序需要在机器人做完一个动作周期之后再进行(比如更换电极帽)。
这些程序是否执行,逻辑由PLC 进行判断,如果执行,则通过发送程序号的方式,在机器人主程序中调用;1车型 1车型程序号 其他车型 结束车型主程序Array 1、编写各车型主程序前,需要对机器人在该车型上所需完成的工作内容进行流程分解;2、分解后的流程动作分别编写子程序;3、各车型主程序负责对这些子程序进行动作顺序的排序、调用;4、右图为程序示例:(原位到等待位的)准备动作、抓取工件、放置工件、放置抓手、抓取焊枪、焊接、回原位;5、每一次调用焊接程序完毕,都需要判断是否需要修磨;6、提醒:工具切换动作、修磨动作由于可以被其他程序调用,不能算作某个车型的流程动作。
(见后:其他动作程序)技术创新引领行业潮流高效管理创造人文价值打造受人尊敬的国际化企业技术创新引领行业潮流高效管理创造人文价值打造受人尊敬的国际化企业技术创新引领行业潮流高效管理创造人文价值打造受人尊敬的国际化企业一、基本命名设定:机器人主程序:main车型主程序:此种生产线车型型号 ...焊接程序:weld抓取工件(或从车身上抓取定位抓手):pick**放置工件(或将定位抓手放置到车身):drop***涂胶程序:glue螺柱焊程序:stud打号程序:stamp(所有工具切换时的)工具抓取:dockon(所有工具切换时的)工具放置:dockoff修磨程序:tipdress到服务位置(维护、更换电极帽等):service准备动作程序:hometowait回原位程序:waittohome换电极冒程序:tipchange以上是机器人程序的命名。


abb机器人程序实例随着科技的不断进步和人工智能的快速发展,机器人已经成为我们生活中不可或缺的一部分。
而abb机器人则是其中一种应用广泛的机器人程序。
本文将介绍abb机器人程序的实例和应用。
abb机器人程序是一种用于控制abb机器人的软件程序。
它可以让机器人具备自主的工作能力,完成各种任务,提高工作效率,减少人力成本。
下面我们将以工业领域中的应用为例,来具体介绍abb 机器人程序的实例。
abb机器人程序在汽车生产线上的应用非常广泛。
在汽车制造过程中,需要进行许多重复的工作,如焊接、喷漆、装配等。
通过编写abb机器人程序,可以将这些工作交给机器人来完成。
机器人根据程序指令,可以准确地进行焊接,保证焊接质量;可以均匀地喷漆,提高喷漆效率;可以精确地进行装配,保证装配的质量。
这样不仅提高了生产效率,还减少了工人的劳动强度,提高了产品质量。
除了汽车制造,abb机器人程序还在电子制造行业中得到了广泛应用。
在电子制造过程中,需要进行很多微小精细的操作,如电路板组装、元器件焊接等。
这些操作对操作者的技术要求很高,而且容易出错。
通过编写abb机器人程序,可以让机器人来完成这些操作,提高操作的准确性。
机器人可以根据程序指令,精确地完成电路板的组装,确保组装的准确性;可以精确地进行元器件的焊接,保证焊接的质量。
这样不仅提高了生产效率,还减少了产品的不良率。
abb机器人程序还可以在仓储物流行业中得到应用。
在仓储物流过程中,需要进行大量的物品搬运和装卸工作。
通过编写abb机器人程序,可以让机器人来完成这些工作,提高搬运和装卸的效率。
机器人可以根据程序指令,准确地搬运物品,避免了人工搬运的不准确和劳累;可以精确地进行装卸工作,保证装卸的速度和质量。
这样不仅提高了物流效率,还减少了人力资源的浪费。
总结起来,abb机器人程序在工业领域中的应用非常广泛。
通过编写abb机器人程序,可以让机器人具备自主的工作能力,完成各种任务,提高工作效率,减少人力成本。
![FANUC发那科[a]-L-4 程序设计](https://uimg.taocdn.com/b1abf1b831b765ce0408147e.webp)
ABB机器人是一种自动化工业机器人,可用于各种生产线上的码垛操作。
码垛是指将产品按照一定的规则叠放起来,以方便运输、存储或其他后续处理。
在生产环境中,码垛通常需要精确的排列和叠放,而ABB机器人可以通过编程实现自动化的码垛操作,提高生产效率和准确性。
在实际操作中,编写ABB机器人的码垛程序是至关重要的。
下面我们将结合ABB机器人的特点和编程方法,详细阐述ABB机器人码垛程序编程的方法与步骤。
1. 确定码垛需求和规则在进行ABB机器人码垛程序编程之前,首先需要确定具体的码垛需求和规则。
这包括需要码垛的产品规格、堆放的方式、堆放的高度、堆放的稳定性要求等。
只有明确了这些需求和规则,才能更好地进行编程设计。
2. 了解ABB机器人的编程语言ABB机器人使用的是ABB RobotStudio软件,可以通过该软件进行编程。
了解该软件的编程语言和功能,是进行码垛程序编程的基础。
该软件支持多种编程语言,包括ABB的RAPID编程语言和基于图形的FlexPendant编程方式,可以根据实际情况选择合适的编程方式进行操作。
3. 编写码垛程序在确定了需求和规则,并掌握了相应的编程语言和工具之后,就可以开始编写码垛程序。
首先需要创建一个新的项目,并在项目中创建一个新的程序。
然后根据产品规格和堆放规则,编写具体的码垛程序。
这包括机器人的移动路径规划、夹爪的动作控制、产品的堆放位置计算等。
4. 调试和优化程序编写完成后,需要进行程序的调试和优化。
这包括在仿真环境中模拟运行程序,检查程序的运行效果和是否符合需求和规则。
如果发现问题,需要对程序进行优化和修改,直至达到理想的效果。
5. 在实际环境中应用程序在程序调试和优化完成后,可以将程序应用到实际的生产环境中。
在操作时需要注意安全和稳定性,确保码垛操作的效率和准确性。
总结起来,ABB机器人的码垛程序编程需要根据需求和规则进行编程设计,掌握ABB RobotStudio软件的编程语言和功能,编写码垛程序,进行调试和优化,最后将程序应用到实际环境中。
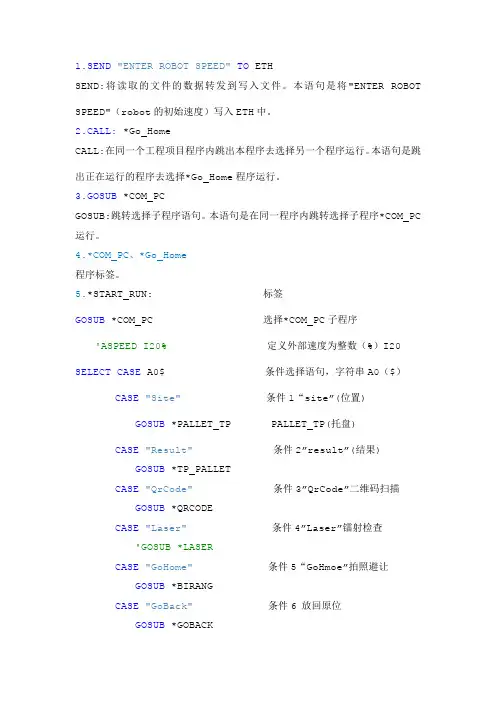
1.SEND"ENTER ROBOT SPEED"TO ETHSEND:将读取的文件的数据转发到写入文件。
本语句是将"ENTER ROBOT SPEED"(robot的初始速度)写入ETH中。
2.CALL: *Go_HomeCALL:在同一个工程项目程序内跳出本程序去选择另一个程序运行。
本语句是跳出正在运行的程序去选择*Go_Home程序运行。
3.GOSUB *COM_PCGOSUB:跳转选择子程序语句。
本语句是在同一程序内跳转选择子程序*COM_PC 运行。
4.*COM_PC、*Go_Home程序标签。
5.*START_RUN: 标签GOSUB *COM_PC 选择*COM_PC子程序'ASPEED I20% 定义外部速度为整数(%)I20 SELECT CASE A0$ 条件选择语句,字符串A0($)CASE"Site" 条件1“site”(位置)GOSUB *PALLET_TP PALLET_TP(托盘)CASE"Result" 条件2”result”(结果)GOSUB *TP_PALLETCASE"QrCode" 条件3”QrCode”二维码扫描GOSUB *QRCODECASE"Laser" 条件4”Laser”镭射检查'GOSUB *LASERCASE"GoHome" 条件5“GoHmoe”拍照避让GOSUB *BIRANGCASE"GoBack" 条件6 放回原位GOSUB *GOBACKCASE ELSE 若无一条件成立,则执行CASE ELSE,然后执行下一语句SEND"Command is not found,@"TO CMU 将读出的文件数据”Command is not found “转发到写入CMU中PRINT"---------Command is not found---------" PRINT输出语句,输出command is not foundEND SELECT 结束条件选择语句GOTO *START_RUN 跳转语句(GOTO),跳转到*START_RUNBO标签语句6.PMOVE(1,SGI1),Z=0.00PMOVE语句是托盘移动语句指令,本指令默认为1号机器人,编号为1号托盘,SGI1托盘点位,第三轴(Z轴)抬升到0.00mm。

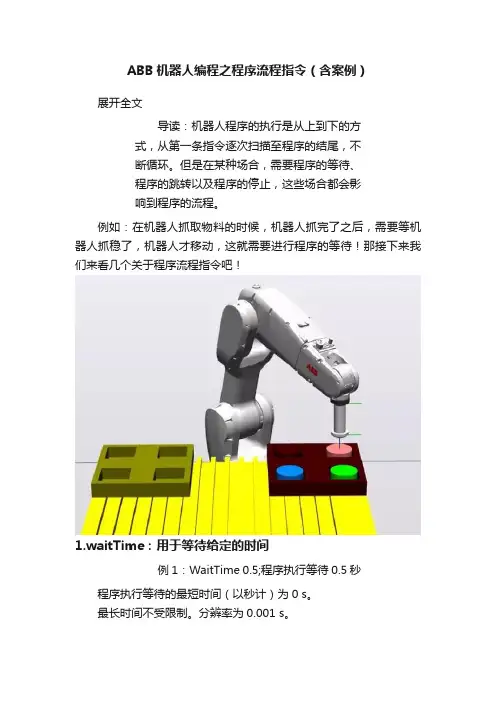
ABB机器人编程之程序流程指令(含案例)展开全文导读:机器人程序的执行是从上到下的方式,从第一条指令逐次扫描至程序的结尾,不断循环。
但是在某种场合,需要程序的等待、程序的跳转以及程序的停止,这些场合都会影响到程序的流程。
例如:在机器人抓取物料的时候,机器人抓完了之后,需要等机器人抓稳了,机器人才移动,这就需要进行程序的等待!那接下来我们来看几个关于程序流程指令吧!1.waitTime:用于等待给定的时间例1:WaitTime 0.5;程序执行等待0.5秒程序执行等待的最短时间(以秒计)为0 s。
最长时间不受限制。
分辨率为0.001 s。
详解:机器人程序指针执行到此条指令,必须等待0.5秒以后才继续往下执行!例2:WaitTime \InPos,0.5详解:在WaitTime指令后面加入了Inpos参数的含义就是:机器人到位且完全停止后才开始计时,时间到达0.5秒以后才继续往下执行!例3:MoveJ p1, vmax, fine, tool2;WaitTime \InPos,0.5;MoveJ p2, vmax, z30, tool2;详解:机器人到达P1位置点之后,并且机器人完全停止下来,才开始计时,时间到达0.5秒以后才机器人继续执行到达P2位置点。
2. WaitDI:用于等待,直至已设置数字信号输入例1:WaitDI di4, 1;仅在已设置di4输入后,继续程序执行。
详解:机器人程序指针执行到此条指令,需要等待开关信号di4为1的时候,才往下执行。
例2:WaitDI di0,1\MaxTime:=3;详解:在WaitDI di0,1指令后面加上了可选参数MaxTime:=3,则表示允许的最长等待时间3秒。
如果在3秒时间以内di0还没有为1,机器人则报错处理。
3. WaitUntil:用于等待,直至满足逻辑条件。
例如,其可以等待,直至已设置一个或多个输入例1:WaitUntil di4 = 1;仅在已设置di4输入后,继续程序执行。
机器人期末考试题及答案一、选择题(每题2分,共20分)1. 机器人三大定律中,第一定律是:A. 机器人不得伤害人类B. 机器人必须服从人类命令C. 机器人必须保护自己D. 机器人必须帮助人类答案:A2. 以下哪个不是机器人的传感器类型?A. 视觉传感器B. 触觉传感器C. 声音传感器D. 温度传感器答案:D3. 机器人编程语言中,以下哪个不是常用的?A. PythonB. JavaC. C++D. Lisp答案:B4. 在机器人运动学中,以下哪个概念描述的是机器人手臂的运动范围?A. 工作空间C. 动力学D. 控制系统答案:A5. 以下哪个是机器人的自主导航技术?A. 机器学习B. 深度学习C. SLAM(Simultaneous Localization and Mapping)D. 神经网络答案:C6. 机器人的控制系统通常包括以下哪个部分?A. 传感器B. 执行器C. 控制器D. 所有上述选项答案:D7. 机器人的机械臂通常由哪些部件组成?A. 连杆和关节B. 传感器和执行器C. 控制器和电机D. 以上都是答案:A8. 以下哪个是机器人的驱动方式?B. 气动C. 液压D. 所有上述选项答案:D9. 机器人在执行任务时,通常需要考虑以下哪个因素?A. 环境B. 任务复杂度C. 机器人的物理限制D. 所有上述选项答案:D10. 以下哪个是机器人的通信协议?A. TCP/IPB. BluetoothC. Wi-FiD. 所有上述选项答案:D二、填空题(每空2分,共20分)1. 机器人的三大定律是由________提出的。
答案:艾萨克·阿西莫夫2. 机器人的________是指机器人在执行任务时,能够自主地做出决策的能力。
答案:智能3. 机器人的________是指机器人在执行任务时,能够感知环境并做出相应反应的能力。
答案:感知4. 机器人的________是机器人的大脑,负责处理信息和控制机器人的行为。
少儿机器人编程三级教程第一章:认识机器人1.1 机器人是什么?机器人是一种能够执行任务的智能机械设备,它可以模仿人类的行为,完成各种工作。
1.2 机器人的分类机器人可以分为工业机器人、服务机器人和教育机器人等。
工业机器人主要应用于生产线上,服务机器人可以帮助人们完成日常生活中的各种任务,而教育机器人则是专门用于教育和培训。
1.3 为什么学习机器人编程?学习机器人编程可以培养孩子的逻辑思维、动手能力和创新精神。
同时,机器人编程也是未来工作的重要技能之一。
第二章:机器人编程基础2.1 什么是机器人编程?机器人编程是指通过编写代码来控制机器人执行各种任务的过程。
2.2 机器人编程语言常见的机器人编程语言有Scratch、Python和C++等。
Scratch适合初学者,Python和C++则更适合进阶学习。
2.3 学习机器人编程的步骤学习机器人编程可以分为以下步骤:- 学习基本的编程概念,如循环、条件语句等。
- 学习机器人的传感器和执行器,了解它们的工作原理。
- 编写代码,控制机器人完成特定任务。
- 调试和优化代码,确保机器人的行为符合预期。
第三章:机器人编程实践3.1 使用Scratch编程控制机器人Scratch是一种图形化编程语言,适合初学者。
通过拖拽积木块,孩子们可以轻松地编写代码,控制机器人完成各种动作。
3.2 使用Python编程控制机器人Python是一种常用的编程语言,可以用来编写更复杂的机器人程序。
通过学习Python,孩子们可以控制机器人进行更高级的任务,如跟随线路、避开障碍等。
3.3 使用C++编程控制机器人C++是一种底层的编程语言,适合对机器人编程有一定经验的学习者。
通过学习C++,孩子们可以更深入地了解机器人的底层原理,并编写更高效的程序。
第四章:机器人编程进阶4.1 机器人视觉编程机器人视觉编程是指利用摄像头和图像处理算法,让机器人能够识别和理解周围的环境。
学习机器人视觉编程可以让机器人更加智能化,具备更强的自主性。
ABB[a]-J-6ABB 机器人的程序编程6.1 任务目标✍掌握常用的PAPID 程序指令。
✍掌握基本RAPID程序编写、调试、自动运行和保存模块。
6.2 任务描述✍建立程序模块test12.24,模块test12.24 下建立例行程序main 和Routine1,在main 程序下进行运动指令的基本操作练习。
✍掌握常用的RAPID 指令的使用方法。
✍建立一个可运行的基本RAPID程序,内容包括程序编写、调试、自动运行和保存模块。
6.3 知识储备6.3.1 程序模块与例行程序RAPID 程序中包含了一连串控制机器人的指令,执行这些指令可以实现对机器人的控制操作。
应用程序是使用称为RAPID 编程语言的特定词汇和语法编写而成的。
RAPID 是一种英文编程语言,所包含的指令可以移动机器人、设置输出、读取输入,还能实现决策、重复其他指令、构造程序、与系统操作RAPID 程序的架构说明:1)RAPID 程序是由程序模块与系统模块组成。
一般地,只通过新建程序模块来构建机器人的程序,而系统模块多用于系统方面的控制。
2)可以根据不同的用途创建多个程序模块,如专门用于主控制的程序模块,用于位置计算的程序模块,用于存放数据的程序模块,这样便于归类管理不同用途的例行程序与数据。
3)每一个程序模块包含了程序数据、例行程序、中断程序和功能四种对象,但不一定在一个模块中都有这四种对象,程序模块之间的数据、例行程序、中断程序和功能是可以互相调用的。
4)在RAPID 程序中,只有一个主程序main,并且存在于任意一个程序模块中,并且是作为整个RAPID 程序执行的起点。
操作步骤:6.3.2 在示教器上进行指令编程的基本操作ABB 机器人的RAPID 编程提供了丰富的指令来完成各种简单与复杂的应用。
下面就从最常用的指令开始6.4.1 基本RAPID 指令练习建立程序模块test12.24,模块test12.24 下建立例行程序main 和Routine1,在main 程序下进行运动指令的基本操作练习。
1.赋值指令“:=”赋值指令用于对程序数据进行赋值。
赋值可以是一个常量或数学表达式。
下面的操作步骤以添加一个常量赋值与数学表达式赋值说明此指令的使用:常量赋值:reg1:=5;数学表达式赋值:reg2:=reg1+4;(2)添加带数学表达式的赋值指令的操作1.在指令列表中选择“:=”。
2.机器人运动指令机器人在空间中运动主要有关节运动(MoveJ)、线性运动(MoveL)、圆弧运动(MoveC)和绝对位置运动(MoveAbsJ)四种方式。
(1)绝对位置运动指令绝对位置运动指令是机器人的运动使用六个轴和外轴的角度值来定义目标位置数据。
操作步骤:1.进入“手动操纵”画面,确认已选定工具坐标与工件坐标(*提示:在添加或修改机器人的运动指令之前,一定要确认所使用的工具坐标与工件坐标)。
2.选中指令的位置,打开“添加指令” 菜单,选择“M oveAbsJ”指令。
指令解析:*提示:MoveAbsJ 常用于机器人六个轴回到机械零点(0°)的位置。
(2)关节运动指令关节运动指令是对路径精度要求不高的情况下,机器人的工具中心点TCP 从一个位置移动到另一个位置,两个位置之间的路径不一定是直线。
指令解析:关节运动适合机器人大范围运动时使用,不容易在运动过程中出现关节轴进入机械死点的问题。
*注意:目标点位置数据定义机器人TCP 点的运动目标,可以在示教器中单击“修改位置”进行修改。
运动速度数据定义速度(mm/s)转弯区数据定义转变区的大小mm。
工具坐标数据定义当前指令使用的工具工件坐标数据定义当前指令使用的工件坐标(3)线性运动指令线性运动是机器人的TCP 从起点到终点之间的路径始终保持为直线。
一般如焊接、涂胶等应用对路径要求高的场合使用此指令。
(4)圆弧运动指令圆弧路径是在机器人可到达的控件范围内定义三个位置点,第一个点是圆弧的起点,第二个点用于圆弧的曲率,第三个点是圆弧的终点。
指令解析:MoveL p10, v1000, fine, tool1\Wobj:=wobj1;(5)运动指令的使用示例指令:MoveL p1, v200, z10, tool1\Wobj:=wobj1;MoveL p2, v100, fine, tool1\Wobj:=wobj1;MoveJ p3, v500, fine, tool1\Wobj:=wobj1;图示:p3p110mm200mm/s50100m0mp2说明:机器人的TCP 从当前位置向p1 点以线性运动方式前进,速度是200mm/s,转弯区数据是10mm,距离p1 点还有10mm 的时候开始转弯,使用的工具数据是tool1,工件坐标数据是wobj1。
机器人的TCP 从p1 向p2 点以线性运动方式前进,速度是100mm/s,转弯区数据是fine,机器人在p2点稍作停顿,使用的工具数据是tool1,工件坐标数据是wobj1。
机器人的TCP 从p2 向p3 点以关节运动方式前进,速度是500mm/s,转弯区数据是fine,机器人在p3点停止,使用的工具数据是tool1,工件坐标数据是wobj1。
提示:*关于速度:速度一般最高为50000mm/s,在手动限速状态下,所有的运动速度被限速在250mm/s*关于转弯区:fine 指机器人TCP 达到目标点,在目标点速度降为零。
机器人动作有所停顿然后再向下运动,如果是一段路径的最后一个点,一定要为fine。
转弯区数值越大,机器人的动作路径就越圆滑与流畅。
3.I/O 控制指令I/O 控制指令用于控制I/O 信号,以达到与机器人周边设备进行通信的目的。
(1)Set 数字信号置位指令Set 数字信号置位指令用于将数字输出(Digital Output)置位为“1”。
Set do1;(2)Reset 数字信号复位指令Reset 数字信号复位指令用于将数字输出(Digital Output)置位为“0”。
Reset do1;*提示:如果在Set、Reset 指令前有运动指令MoveJ、MoveL、MoveC、MoveAbsJ 的转弯区数据,必须使用fine 才可以准确地输出I/O 信号状态的变化。
(3)WaitDI 数字输入信号判断指令WaitDI 数字输入信号判断指令用于判断数字输入信号的值是否与目标一致。
WaitDI di1, 1;在例子中,程序执行此指令时,等待di1 的值为1。
如果di1 为1,则程序继续往下执行;如果到达最大等待时间300s(此时间可根据实际进行设定)以后,di1 的值还不为1,则机器人报警或进入出错处理程序。
(4)WaitDO 数字输出信号判断指令WaitDO 数字输出信号判断指令用于判断数字输出信号的值是否与目标一致。
WaitDO do1, 1;参数以及说明同WaitDi 指令。
(5)WaitUntil 信号判断指令WaitUntil 信号判断指令可用于布尔量、数字量和I/O 信号值的判断,如果条件到达指令中的设定值,程序继续往下执行,否则就一直等待,除非设定了最大等待时间。
WaitUntil di1 = 1;WaitUntil do1 = 0;WaitUntil flag = TRUE;WaitUntil num1 = 4;4.条件逻辑判断指令条件逻辑判断指令用于对条件进行判断后,执行相应的操作,是RAPID 中重要的组成部分。
(1)Compact IF 紧凑型条件判断指令Compact IF 紧凑型条件判断指令用于当一个条件满足了以后,就执行一句指令。
IF flag1 = TRUE Set do1;如果flag1 的状态为TRUE,则do1 被置位为1。
(2)IF 条件判断指令IF 条件判断指令,就是根据不同的条件去执行不同的指令。
指令解析:IF num1=1 THENflag:=TRUE;ELSEIF num1=2 THENf la g1:=FALSE;ELSESet do1;ENDIF如果num1 为1,则flag1 会赋值为TRUE。
如果num1 为2,则flag1 会赋值为FALSE。
除了以上两种条件之外,则执行do1 置位为1.*条件判定的条件数量可以根据实际情况进行增加与减少。
(3)FOR 重复执行判断指令FOR 重复执行判断指令,是用于一个或多个指令需要重复执行次数的情况FOR i FROM 1 TO 10 DORoutine1;ENDFOR例行程序Routine1,重复执行10 次。
(4)WHILE 条件判断指令WHILE 条件判断指令,用于在给定条件满足的情况下,一直重复执行对应的指令。
WHILE num1>num2 DOnum1:=num1-1;ENDWHILE当num1>num2 的条件满足的情况下,就一直执行num1:=num1-1 的操作。
5.其他的常用指令(1)ProcCall 调用例行程序指令通过使用此指令在指定的位置调用例行程序。
(2)RETURN 返回例行程序指令 4. 调用例行程序指令执行的结果。
RETURN 返回例行程序指令,当此指令被执行时,则马上结束本例行程序的执行,返回程序指针到调用此例行程序的位置。
当di1=1 时,执行RETURN 指令,程序指针返回到调用Routine2 的位置并继续向下执行Set do1 这个指令。
(3)WaitTime 时间等待指令WaitTime 时间等待指令,用于程序在等待一个指定的时间以后,再继续向下执行WaitTime 4;Reset do1;等待4s 以后,程序向下执行Reset do1 指令。
6.4.2 常用RAPID 指令的使用方法1.用户输入两个数字,按钮选择一个运算符,屏幕输出运算结果(使用TPReadNum、TPReadFK、TPWrite 和IF 指令)2.用户输入一个0-100 的分数值,程序输出A(90-100)、B(80-89)、C(60-79)、D(0-60)四个评级。
(IF ELSEIF语句的使用)3.使用WHILE 或FOR 循环,计算1+2+3+……+99+100 的结果。
4.RAPID 编程中的功能(FUNCTION)的使用介绍使用自定义功能,自己实现Offs 功能和Abs 功能(需掌握带参数的功能、功能返回值以及复杂数据的赋值,需要教师指导)。
方法,随堂联系practise10-1,功能Abs:功能Offs:5.掌握中断程序的使用(1)使用di 信号触发中断程序,每次触发,均使系统用户变量reg1 进行+1 的操作,当reg1>10 时,将reg1重置为1。
(2)使用ITimer 指令进行定时间隔为1s 的中断触发,每次触发使系统用户变量reg2 进行+1 的操作,当reg2>10 时,将reg2 重置为1。