nxt机器人硬件及软件介绍
- 格式:ppt
- 大小:2.46 MB
- 文档页数:33
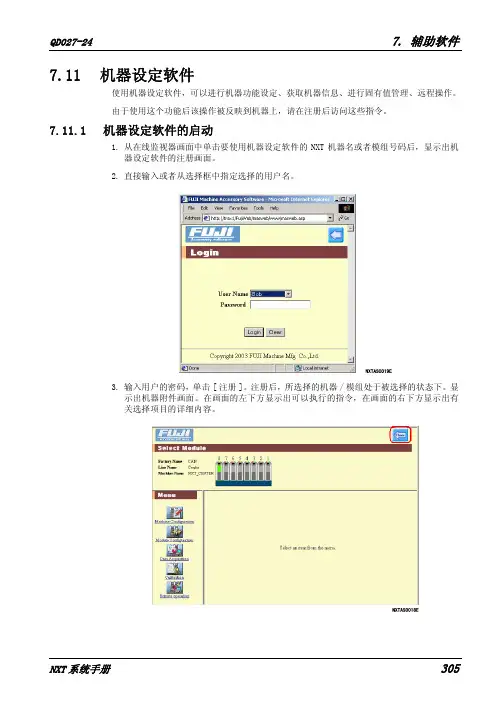


nxt硬件及软件介绍1、硬件介绍:1.1 NXT的外观及组成部分NXT是一种教育用,外观为方形,整体由多个部件组成。
包括主控制器(Brick),用于控制的运行和连接各种传感器和执行器;电机(Motor),用于驱动的运动;传感器(Sensor),如触摸传感器、光线传感器、声音传感器等,用于感知周围的环境。
1.2 NXT的电源及连接接口NXT使用可充电电池作为电源,并提供了与其他设备和传感器连接的接口。
主控制器上有多个端口,可以连接电机和传感器,并通过USB或蓝牙与计算机或其他外部设备进行通信。
2、软件介绍:2.1 NXT的编程环境NXT使用LEGO MINDSTORMS NXT软件作为编程环境。
该软件提供了图形化编程界面,使用户可以通过拖拽和连接代码块的方式编写程序。
同时,也支持使用文本编程语言(如C语言)进行高级编程。
2.2 NXT的编程功能LEGO MINDSTORMS NXT软件提供了丰富的编程功能,用户可以通过编程实现的各种功能。
包括控制电机的转动速度和方向、读取传感器的数值、根据传感器的输入做出相应的决策等。
3、附件:本文档附带的附件包括:- LEGO MINDSTORMS NXT软件安装文件- NXT使用手册- NXT部件说明书- 相关编程案例和示例代码4、法律名词及注释:4.1 版权法:版权法是指保护作品的著作权人对其创作的作品享有的权利的法律。
根据版权法的规定,除非得到著作权人的许可,否则不得擅自复制、传播、展示或改编作品。
4.2 专利法:专利法是指保护发明者对其发明享有专有权利的法律。
根据专利法的规定,发明者可以通过申请专利来保护其发明,并获得在一定时期内对其发明的独占权。
4.3 商标法:商标法是指保护商标的法律。
商标是指用于区别商品或服务来源的标识,如商标名称、商标图案等。
根据商标法的规定,商标权人可以通过注册商标来保护其商标,并获得对该商标的独占使用权。


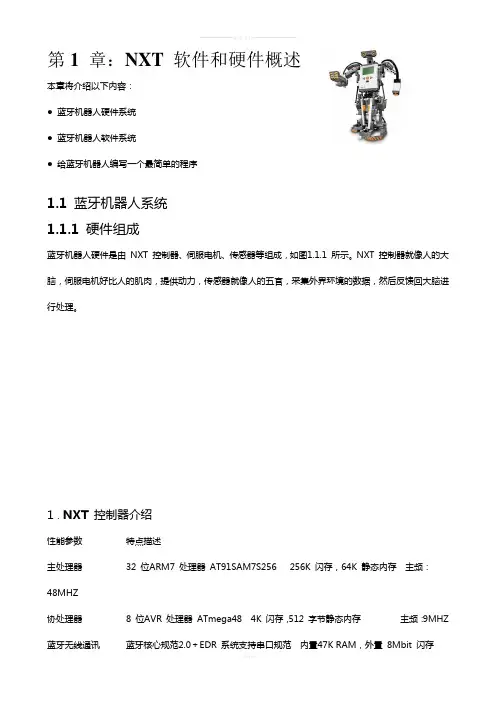
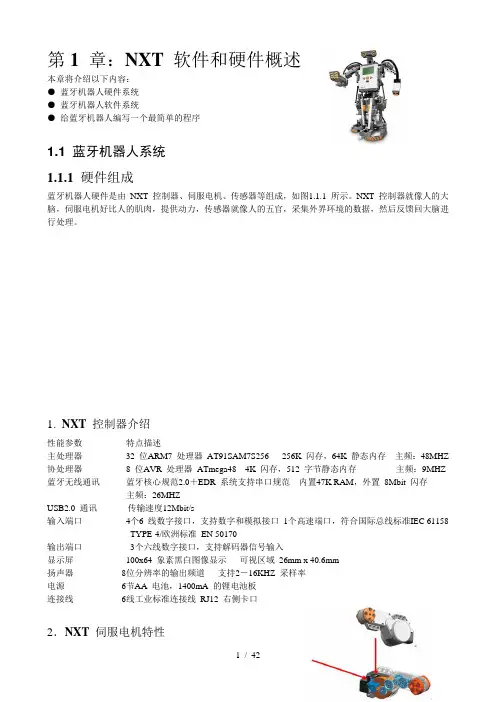
第1 章:NXT 软件和硬件概述本章将介绍以下内容:●蓝牙机器人硬件系统●蓝牙机器人软件系统●给蓝牙机器人编写一个最简单的程序1.1 蓝牙机器人系统1.1.1 硬件组成蓝牙机器人硬件是由NXT 控制器、伺服电机、传感器等组成,如图1.1.1 所示。
NXT 控制器就像人的大脑,伺服电机好比人的肌肉,提供动力,传感器就像人的五官,采集外界环境的数据,然后反馈回大脑进行处理。
1.NXT 控制器介绍性能参数特点描述主处理器32 位ARM7 处理器AT91SAM7S256 256K 闪存,64K 静态内存主频:48MHZ协处理器8 位AVR 处理器ATmega48 4K 闪存,512 字节静态内存主频:9MHZ 蓝牙无线通讯蓝牙核心规范2.0+EDR 系统支持串口规范内置47K RAM,外置8Mbit 闪存主频:26MHZUSB2.0 通讯传输速度12Mbit/s输入端口4个6 线数字接口,支持数字和模拟接口1个高速端口,符合国际总线标准IEC 61158 TYPE-4/欧洲标准EN 50170输出端口3个六线数字接口,支持解码器信号输入显示屏100x64 象素黑白图像显示可视区域26mm x 40.6mm扬声器8位分辨率的输出频道支持2-16KHZ 采样率电源6节AA 电池,1400mA 的锂电池板连接线6线工业标准连接线RJ12 右侧卡口2.NXT 伺服电机特性内置角度传感器可以测量速度和距离可以精准控制:●当机器人运行时,可以校准速度●控制精度可以精确到1 度●电机上的孔结构更容易固定和安装●每个电机内置一个角度传感器,这使你能准确的控制电机转动,角度传感器测量电机转动能精确到1 度电机转动1 圈等于360 度,因此如果你在程序里设定电机转动180 度,电机输出时将转动半圈。
3.NXT 传感器特性触动传感器性能上与RCX 触动传感器一样,但NXT 触动传感器前端带有十字孔,方便我们制作缓冲器4.NXT 蓝牙特性蓝牙(BlueTooth)是一种低成本大容量短距离无线通讯新规范,蓝牙规范采用微波频段工作,传输速率每秒1MB字节,最少传输距离10 米,通过增加发射功率可达到100米。
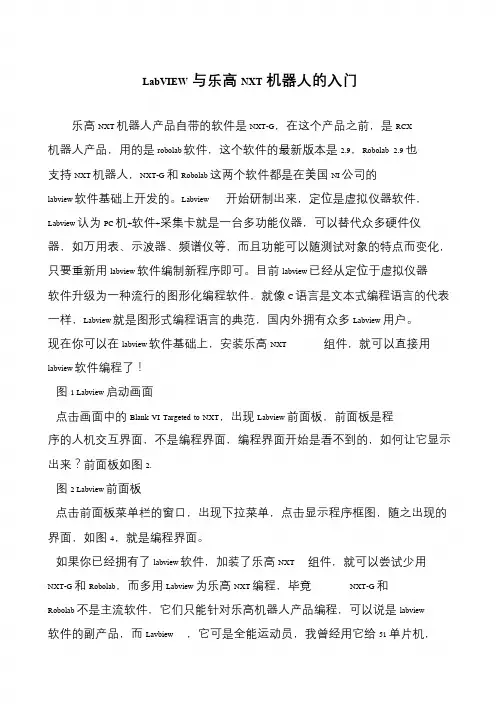
LabVIEW与乐高NXT机器人的入门乐高NXT 机器人产品自带的软件是NXT-G,在这个产品之前,是RCX机器人产品,用的是robolab 软件,这个软件的最新版本是2.9,Robolab 2.9 也支持NXT 机器人,NXT-G 和Robolab 这两个软件都是在美国NI 公司的labview 软件基础上开发的。
Labview 开始研制出来,定位是虚拟仪器软件,Labview 认为PC 机+软件+采集卡就是一台多功能仪器,可以替代众多硬件仪器,如万用表、示波器、频谱仪等,而且功能可以随测试对象的特点而变化,只要重新用labview 软件编制新程序即可。
目前labview 已经从定位于虚拟仪器软件升级为一种流行的图形化编程软件,就像C 语言是文本式编程语言的代表一样,Labview 就是图形式编程语言的典范,国内外拥有众多Labview 用户。
现在你可以在labview 软件基础上,安装乐高NXT 组件,就可以直接用labview 软件编程了!图1 Labview 启动画面点击画面中的Blank VI Targeted to NXT,出现Labview 前面板,前面板是程序的人机交互界面,不是编程界面,编程界面开始是看不到的,如何让它显示出来?前面板如图2.图2 Labview 前面板点击前面板菜单栏的窗口,出现下拉菜单,点击显示程序框图,随之出现的界面,如图4,就是编程界面。
如果你已经拥有了labview 软件,加装了乐高NXT 组件,就可以尝试少用NXT-G 和Robolab,而多用Labview 为乐高NXT 编程,毕竟NXT-G 和Robolab 不是主流软件,它们只能针对乐高机器人产品编程,可以说是labview 软件的副产品,而Lavbiew ,它可是全能运动员,我曾经用它给51 单片机,。
nxt(乐高)中文教程一、教学内容本节课的教学内容选自《NXT(乐高)中文教程》第一章第四节,主要介绍如何使用NXT的传感器和执行器进行简单的编程控制。
具体内容包括:温度传感器的使用、触摸传感器的使用、电机的基本控制和传感器数据的读取与显示。
二、教学目标1. 学生能够理解NXT的基本组成部分及其功能。
2. 学生能够掌握温度传感器和触摸传感器的使用方法。
3. 学生能够通过编程控制电机实现基本运动。
三、教学难点与重点重点:NXT的基本组成部分及其功能、温度传感器和触摸传感器的使用方法、电机的基本控制。
难点:传感器数据的读取与显示、编程控制电机实现复杂运动。
四、教具与学具准备教具:NXT套件、电脑、编程软件。
学具:每位学生一台NXT套件、每组一台电脑、编程软件。
五、教学过程1. 实践情景引入:让学生观察并描述NXT的外观和组成部分。
2. 知识点讲解:介绍NXT的基本组成部分及其功能,如电机、传感器、触摸屏等。
3. 例题讲解:示范如何使用温度传感器和触摸传感器进行编程控制。
4. 学生动手实践:让学生分组进行编程实验,使用温度传感器和触摸传感器控制NXT的运动。
5. 随堂练习:让学生编写程序,实现使用传感器数据控制NXT的运动。
6. 知识拓展:介绍如何使用编程软件进行电机控制和传感器数据的读取与显示。
六、板书设计板书内容:NXT基本组成部分及其功能、温度传感器和触摸传感器的使用方法、电机的基本控制。
七、作业设计1. 请用编程软件编写一个程序,实现使用温度传感器控制NXT的运动。
答案:根据温度传感器的数据,控制NXT的电机进行相应的运动。
2. 请用编程软件编写一个程序,实现使用触摸传感器控制NXT的运动。
答案:根据触摸传感器的状态,控制NXT的电机进行相应的运动。
八、课后反思及拓展延伸本节课学生掌握了NXT的基本组成部分及其功能,能够使用温度传感器和触摸传感器进行编程控制。
但在传感器数据的读取与显示方面,部分学生仍存在困难,需要在课后加强练习和指导。
第1 章:NXT 软件和硬件概述本章将介绍以下内容:●蓝牙机器人硬件系统●蓝牙机器人软件系统●给蓝牙机器人编写一个最简单的程序1.1 蓝牙机器人系统1.1.1 硬件组成蓝牙机器人硬件是由NXT 控制器、伺服电机、传感器等组成,如图1.1.1 所示。
NXT 控制器就像人的大脑,伺服电机好比人的肌肉,提供动力,传感器就像人的五官,采集外界环境的数据,然后反馈回大脑进行处理。
1.NXT 控制器介绍性能参数特点描述主处理器32 位ARM7 处理器AT91SAM7S256 256K 闪存,64K 静态内存主频:48MHZ 协处理器8 位AVR 处理器ATmega48 4K 闪存,512 字节静态内存主频:9MHZ 蓝牙无线通讯蓝牙核心规范2.0+EDR 系统支持串口规范内置47K RAM,外置8Mbit 闪存主频:26MHZUSB2.0 通讯传输速度12Mbit/s输入端口4个6 线数字接口,支持数字和模拟接口1个高速端口,符合国际总线标准IEC 61158 TYPE-4/欧洲标准EN 50170输出端口3个六线数字接口,支持解码器信号输入显示屏100x64 象素黑白图像显示可视区域26mm x 40.6mm扬声器8位分辨率的输出频道支持2-16KHZ 采样率电源6节AA 电池,1400mA 的锂电池板连接线6线工业标准连接线RJ12 右侧卡口2.NXT 伺服电机特性内置角度传感器可以测量速度和距离可以精准控制:●当机器人运行时,可以校准速度●控制精度可以精确到 1 度●电机上的孔结构更容易固定和安装●每个电机内置一个角度传感器,这使你能准确的控制电机转动,角度传感器测量电机转动能精确到1 度电机转动1 圈等于360 度,因此如果你在程序里设定电机转动180 度,电机输出时将转动半圈。
3.NXT 传感器特性触动传感器性能上与RCX 触动传感器一样,但NXT 触动传感器4.NXT 蓝牙特性蓝牙(BlueTooth)是一种低成本大容量短距离无线通讯新规范,蓝牙规范采用微波频段工作,传输速率每秒1MB字节,最少传输距离10 米,通过增加发射功率可达到100米。
01NXT控制器及其控制程序单元目标知道控制器NXT的特点及应用。
知道控制器NXT的基本组成及工作过程。
一个机器人之所以能有各种功能,就是因为它的高级的大脑,但它的大脑不象我们的大脑有细胞组成,它的大脑是这个世纪的决定性的发明——微电子技术构成,就是我们看到的控制器,这里我们这个控制器称为NXT。
NXT看起来象个MP3一样,里面是块智能芯片。
就是这快芯片,通过程序的运行,接受各种反馈信号,并控制各种输出装置。
但它和我们通常说的单片机还是有区别的,单片机一般只能运行汇编语言,而NXT作为智能控制器,各种各样的语言都可以对它进行控制,我们熟悉的C语言,,就连最新的微软推出的MSRS都可以对它进行控制。
所以,NXT 不只是块单片机,我们可以称它为微电脑。
它比单片机从功能等多方面都要更高一级。
而软件,作为“简易机器人制作”这门课程,这里我们着重推荐的是NXT-G软件。
作为机器人的”五感“,它的各种条件的输入设备,传感器:机器人一词,始源于捷克的一出舞台剧,意思是奴隶,其实至今这个已经依然有着延续,就是产生生产力,产生动作行为。
那么如何来产生动作行为呢?就是靠它的输出设备,马达或者灯。
马达的内部其实是一个发电机,并通过一系列的减速传动,从而马达可以形成更大的力。
这个马达的内部有有芯片,可以精确记录圈数等一系列马达参数,我们称为“伺服电机”。
大脑控制器NXT通过导线连接输出和输入设备。
这里的导线我们也可以理解为是神经,人也是大闹通过神经连接五官和四肢的。
在机器人领域,很多基本方式是和人体一样的,比如,人体内也有反馈,机器人控制也有反馈等等。
所以,机器人这门学科,有个学术名称就是“人工智能”!关于NXT的更详细的特性使用方法,这里不做进一步介绍,如果需要更好地了解,请参考《NXT编程指南》一书中的第一章,其中针对NXT的硬件特性做了非常详细地说明。
02控制器与控制电路——陀螺发动机学习目标马达控制顺序等待要求设计一个陀螺的发动机。
nxt硬件及软件介绍尊敬的读者,感谢您阅读本文档,本文将详细介绍nxt的硬件及软件。
在阅读之前,请您注意以下内容:本文所提到的法律名词及注释仅供参考,如果有任何法律问题,请咨询专业法律人士。
1.硬件介绍1.1 主体●机身结构●材质及外观设计●尺寸及重量●控制面板及显示屏●电源系统1.2 传感器●触摸传感器●光线传感器●声音传感器●距离传感器1.3 电机●的驱动电机●附加电机1.4 连接接口●电缆接口●无线通信接口●USB接口●蓝牙接口2.软件介绍2.1 控制软件●安装与配置●用户界面●编程环境●命令与控制2.2 编程语言●基础语法●控制结构●传感器与电机控制●数据存储与处理2.3 传感器与电机编程●传感器数据获取●传感器事件处理●电机控制与调节2.4 控制与编程案例●距离测量控制●障碍物避免控制●路径导航控制●音乐播放控制附件:1.nxt硬件规格说明书2.nxt软件安装指南3.nxt编程示例代码法律名词及注释:1.版权:指对作品享有独占的复制、发行、展览、公开表演、广播、信息网络传播权利。
2.商标:指以文字、图案或者其他标志,可以用于区分商品或者服务的来源和标识的商品牌号。
3.专利:指国家授予发明者在一定时间内对其所做的发明实施专有权的证书。
4.法律责任:指根据法律规定,个人或者组织应当承担的法律后果和责任。
尊敬的读者,如果您对nxt的硬件及软件介绍有任何问题或者需要进一步了解,请随时与我们联系。
感谢您的阅读,祝您使用nxt取得成功!。