NXT机器人培训教案
- 格式:doc
- 大小:625.50 KB
- 文档页数:8
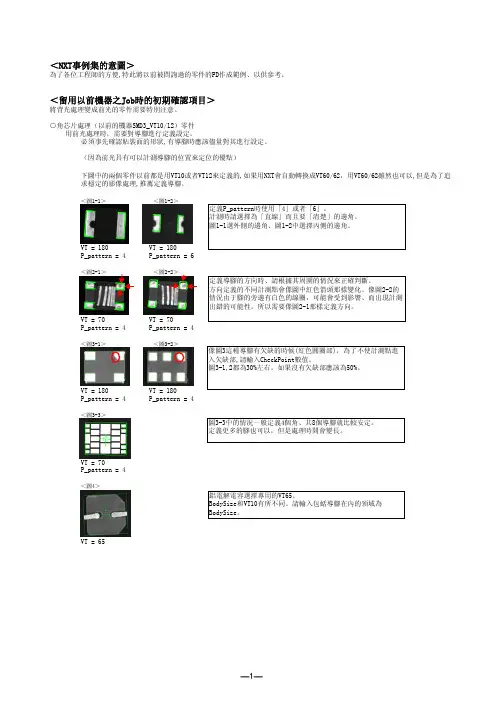
NXT高级培训教材整理编写: Yabo liu 2008.4.24一.如何run the machine with idle mode?1.idle mode(no vision processing, no feeder indexing):在机器处于等板模式时按下CYCLE STOP,再打开附加软件,选择[REMOTE OPERATION]—OPERATION MODE[IDLE MODE(no vision processing, no feeder indexing)] ---点击[OPERATION MODE]—点击[START]---查看机器主画面处于IDLEMODE---按下[START]键执行IDLE.2.idle mode(no panel conveyance,VT253): 在机器处于等板模式时按下CYCLESTOP,再打开附加软件,选择[REMOTE OPERATION]—OPERATIONMODE[IDLE MODE(no panel conveyance,VT253)] ---点击[OPERATIONMODE]—点击[START]---查看机器主画面处于IDLE MODE---按下[START]键执行IDLE.注意该模式不处理影像,但FEEDER会进料.3.对于IDLE MTU-L,应运行idle mode(no panel conveyance,VT253).4.怎样CANCLE IDLE MODE?A.关机MODULE AND BASE电源重启.B.打开附加软件传送[PRODUCTION MODE]到机器上.C.传送一个不同的JOB到机器上.二.如何remove a module?1.旋转MCU前方的手柄(handle)调整MCU GUIDES的高度使其与BASE前面的两个HOLE水平一直.2.慢慢向前推动MCU使其GUIDES插到BASE前面的两个HOLE里面.3.检查MCU上面的水平尺是否水平.若不水平调整前后HANDLE(手柄)使其水平,保证后面的LIFTER触地固定好MCU.4.将前面的旋钮旋至UNLOCK位置.5.再[MANUAL]画面选择清扫菜单,松开MODULE.6.将MODULE慢慢向前拉动至MCU上面的一条黑线位置.7.按下操作面板上面的[POWER]按键几秒钟使MODULE处于睡眠状态,再打开MODULE下面的盖子,依次松开3根气管接头(注意大的上面有LOCK),&3个接口(从左至右依次是communication cable(6 pin);sensor cable(50pin);power cable(4 pin)).另注意3M MODULE有一个CABLE BEAR;6MMODULE有两个CABLE BEAR.8.松开CABLE BEAR上面的WING NUT,使其与模组分开.9.把MODULE 上的LEVER往下推,以使模组能往后拉通过MCU上面的黑线.10.整理一下CABLE BEAR使其不会阻挡模组往后拉,慢慢把整个模组完全拉到MCU上面.11.将MCU前面的旋钮旋到LOCK位置.12.把CABLE BEAR慢慢从模组中拉出来放到BASE上面.13.调整MCU上面前后两个HANDLE,使模组脱离BASE.三.如何insert a module?1. 1. 旋转MCU前方的手柄(handle)调整MCU GUIDES的高度使其与BASE前面的两个HOLE水平一直.2.慢慢向前推动MCU使其GUIDES插到BASE前面的两个HOLE里面.3.把CABLE BEAR从MCU前面两个GUIDES中间穿过再从模组下面慢慢往前拉到MCU上面的凹槽位置,注意CABLE BEAR不要与模组相冲突.4.打开模组下面的小门把CABLE GEAR BRACKET锁到模组上,注意LOCKTHE WING NUT.5.把连接区的LEVER往上推.6.连接好气管接口&电路接口.7.关上模组下面的小门,注意拉到模组时不要与CABLE GEAR相冲突.8.把模组推到BASE上.9.把MCU前面的旋钮旋至LOCK位置.10.调整MCU上面前后两个HANDLE,使模组脱离BASE.ONote: black代表unclampWhite代表clamp五.如何安装机器应用软件?准备工作:为所有BASE的模组进行软件升级,在所有模组的MANUAL画面选择[Diagnostics] mode,进入到工程画面(engineering panel).机器软件安装能够在模组睡眠的时候进行,但是以下三组数据将会被安装者删除:1.机器结构设置参数2.已传送的JOB参数.3.自动Calibration参数.安装步骤:1.将机器应用软件安装光盘放到装有NXT Accessory Software的电脑上,下面的安装画面会自动弹出来.(画面如下)2.点击[NXT Accessory]来安装NXT Accessory Software.注意:若电脑上已安装有NXT Accessory Software,电脑会首先自动卸载这个软件, 自动卸载完了以后,再点击[NXT Accessory]来安装NXT Accessory Software.3.完成NXT Accessory Software的安装以后,继续安装NXT Accessory下面的一些应用软件:I/O Monitor; MEdit; VPDPlus; ViewSoft;DirectLoadSoft(Matrix, Measure Tool,ServoAmp,Various_Unit).4.接下来,进行Upgrade NXT机器应用软件,在安装画面中间NXT Upgrade一栏下面点击[NXT]进行安装.5.紧接着,用IE浏览器打开NXT Accessory Software,选择所要进行安装软件的机器,点击[Remote Operation].6.点击[install machine application].7.选择所要进行安装的版本,点击[START].8.屏幕上会显示正在安装的画面.9.安装完成以后屏幕上会显示”installation complete, please reboot themachine.” 关掉所有BASE电源重新启动,BASE上的模组会请求升级应用软件的版本,请跟随操作面板上的信息升级机器软件版本.六.如何对所有单元进行软件升级?有可能用此命令进行软件升级的单元有:·Head·Feeder Pallet·Operation Panel·Feeders·Conveyors·Tray Unit L步骤如下:1.将需要进行单元软件升级的模组主画面打开到工程画面(engineeringpanel).2.在机器应用软件里面选择:[NXT]-[DirectLoadSoft]-[Various Unit]3.接下来,用IE浏览器打开NXT Accessory Software,选择所要进行软件升级的模组,点击[Remote Operation].4.点击[Update software].5.再点击[Start updating].这时附加软件会COPY相应软件,当COPY结束的时候会自动重启机器.6.当机器重新启动之后会显示如下的选择画面,用操作面板上的箭头键进行选择,你可以选择只需要进行软件升级的单元进行Update,选择完相应的单元以后,按[OK]键,再按[Start]键进行软件升级.7.从Update MENU菜单选择[12.Reboot],再按下[OK]按键,当按下[Start SW]时,软件安装过程将会终止,机器会自动重启.七.如何安装the servo amplifier software?简介: the servo amplifier software是运行servo amplifier并与其进行通讯的必需软件.在下面情况下the servo amplifier software必须进行软件升级:1.the servo amplifier software版本与机器应用软件版本不相匹配的.2.the servo amplifier异常导致the servo amplifier software损坏的.3.由于更换了servo amplifier而使其软件版本改变的.当需要进行安装servo amplifier software时,安装指令会显示在操作面板上.安装步骤如下:1.将需要进行servo amplifier software安装的模组主画面切换到工程画面(engineering panel).2.首先在安装有NXT Accessory Software 的电脑上安装servo amplifiersoftware,方法是:打开NXT 软件光盘,选择[NXT]- [DirectLoadSoft]-[ServoAmp]文件夹,运行”SetupApp.exe”文件,如果屏幕上显示”Theinstallation was completed successfully “,表示安装已经结束.3.接下来,用IE浏览器打开NXT Accessory Software, 选择所要进行软件升级的模组,点击[Remote Operation].4.点击[Update software].5.再点击[Start updating].当执行完软件安装以后,机器会自动重启.八.怎样自动校正conveyor PCB check sensor灵敏度?1.确保轨道上没有PCB挡住SENSOR.2.选中模组打开附加软件,点击[Remote Operation],再点击[adjust conveyorsensor sensitivity].3.点击[Start].九.怎样手动校正sensor amplifier sensitivity?1.将[RUN/STOP]开关设定为[STOP],打开安全门.2.打开面前的传感放大器的盖板.3.请确认设定开关已设定为”LO”.4.按下号码盘一次后,数字显示屏的显示变成[AA],模式光标指示器的[RUN]闪烁.5.旋转号码盘使数字显示屏显示为[PH].此时,模式光标指示器的SET闪烁.6.按下一次号码盘后,在SET不闪烁的同时[PH]的显示闪烁.7.按下一次号码盘后,此时的传感放大器的数值在数字显示屏上已闪烁显示出来(例:90).8.旋转号码盘直到显示屏的显示变成90.9.显示屏的显示变成90后,按下号码盘并输入此值后,显示出[PH].10.再次按下号码盘时,模式光标指示器的SET变成闪烁显示.11.旋转号码盘显示出[AA],同时模式指示器的RUN处于闪烁状态.12.再次按下号码盘时数字显示屏的显示变成现在的实测值,模式指示器的RUN闪烁停止.13.遮住调整后的传感器光轴进行确认.十. 自动Calibration动作是怎样进行的?1.首先,元件相机读取其玻璃盖子上面的四个MARK点.2.MARK相机再过来读取元件相机玻璃盖子上面的四个MARK点,上述动作1&2确保MARK相机与元件相机的中心位置在一条直线上.3.元件相机读取HEAD上面的四个MARK点.4.测试HEAD上每根SPINDLE的摆动量.5.抓取JIG NOZZLE开始测试.6.Calibration开始被执行.7.将JIG NOZZLE的MARK点与元件相机玻璃盖子上的四个MARK点一一对齐检测.8.根据生产程序设定抓取NOZZLE,执行批量NOZZLE影像捕捉.十一.怎样进行轨道单元(conveyor unit)的calibration?1.关掉机器电源.2.拆掉模组后面轨道宽度MOTOR 控制板的盖子.3.拔掉控制卡上面的CN4-1及CN4-2接口.4.打开机器电源等待约10秒钟.5.关掉机器电源.6.接上控制卡上面的CN4-1及CN4-2接口.7.开机重启, calibration自动开始,8.校正完成后关机将盖子装好.9.开机.十二.更换Base CPU Box及Module CPU Box以后怎样恢复?恢复Base CPU Box及Module CPU Box的流程图如下:当更换Base CPU Box的时候,进行机器应用软件的安装是必要的.如果是那样的话,进行标准应用软件的安装是不可能的.因此,要用”紧急安装(Emergency installer)”程序来安装机器应用软件.我们以后都称它为”紧急安装”.使用紧急安装程序Emergency installer.exe,我们用一根网线( a cross cable)将机器CPU与控制电脑直接连接起来,然后已安全模式(a safe mode)启动Base CPU将机器应用软件安装到CPU上.然而,安装Module CPU Box的时候,根据BASE里面的机器应用软件重新启动BASE就会自动安装模组软件.不必执行模组紧急安装.但有时出于维修目的为了观察现象,需执行”紧急安装”将不同版本的软件安装到某个模组上.我们都知道Base CPU Box里面的板卡上有一张PC CARD,它里面都有些什么东西呢?它里面的系统结构参数如下图所示:当你准备更换Base CPU Box的时候,需要格式化the PC CARD.步骤如下:1.拉出模组进入到BASE CPU BOX位置,关掉BASE及所有模组的电源.2.取下BASE CPU BOX上的PC CARD.3.将PC CARD.插到笔记本电脑的相应插口上,双击打开移动盘盘符(the removabledisk),按以下路径找到Finaloffset data:[Fuji]-[System]-[Data]-[FinalOfs],拷贝并保存这个文件里的数据.如果这里面的数据被破坏,要找到备份的数据才可以.4.将[FinalOfs]文件保存到桌面,然后用标准格式化(standard format:1.不要选quickformat 2.选FAT不要选FAT32)格式化PC CARD.5.格式化结束以后,点击任务栏里的U盘绿色箭头符号,停止PC CARD.6.取下PC CARD重新装到Base CPU Box上.当你更换Module CPU Box的时候,首先要备份the Matrix data和the Pallet measurement value.用附加软件备份the Matrix data的方法:首先要将机器模式转到Matrix measurement模式,在打开附加软件选择[Calibration]-[Save matrix data]. 备份the Pallet measurement value是不可能的,所以紧急安装之前需要检查有没有备份数据.使用Emergency installer安装机器应用软件的步骤如下:1.关掉机器电源,将Base CPU Box上面的一个SWITCH拨到UP位置(safe-mode),2.使用一根直通网线将电脑和Base CPU Box直接连接起来.注:进行moduleemergency install的时候,将电脑和Module CPU Box用直通网线直接连接起来.3.打开BASE的主开关, Base CPU以safe-mode启动, Base CPU的IP地址变成:169.254.0.1(固定IP地址). 注:进行module emergency install的时候,关掉其他模组的电源,只启动BASE和目标模组.4.右击[网上邻居]选择[属性], 右击[本地连接] 选择[属性],点击[InternetProtocol(TCP/IP)], 点击[属性],将IP地址改成:169.254.0.2,将the Subnet mask改成:255.255.255.0. 如果IP地址不是169.254.0.0或169.254.0.1,那么可以将电脑的IP地址最后一位数字设成任何数字.5.选择[开始]-[程序]-[Accessories]-[Command Prompt],输入:ping169.254.0.1来pingthe Base CPU Box,如果”Reply from 169.254.0.1”有响应则通讯已被正确建立起来,如果请求被终止,请检查网线连接和网络设置.6.在电脑的CD-ROM中插入NXT control software光盘,并打开这个软件.7.选择[NXT]-[Tool],并双击[Emergency installer]图标.8.在” Emergency installer”对话框中点击浏览器按钮.9.若要进行”Base Emergency installation”,在对话框中选择”base. bin” binary文件,光盘里面该文件的默认地址是:[FujiInstSoft]-[Fuji]-[System]-[Program]- [System].若要进行”Module CPU Emergency install”,请在对话框中选择”module. bin”文件.10.双击”Base”文件名选择它,然后点击[install].若要进行”Module CPU Emergency install”,请双击”Module”文件名.11.安装过程的对话框如下图所示:12.当安装过程结束的时候,会有一提示对话框显示,点击[OK]结束.13.打开NXT 应用软件光盘:[Tool]-[TCP/IP Setting.exe],将BASE 的IP地址改回原来的地址.进行模组紧急安装SKIP这一步.14.将Base CPU Box后面的SWITCH拨到下面位置,取消安全模式.15.拔掉Base CPU Box后面的直通网线,恢复原来的网线.16.打开NXT BASE的主电源.17.恢复电脑的IP地址.对于”Module CPU Emergency install”,下面步骤20~23不需要.18.将机器应用程序光盘上的安装程序COPY到电脑上.19.从机器应用程序中执行”VersionUp.exe”安装.20.经过15~30分钟安装结束之后,关掉BASE的电源.21.打开模组的BREAKER,再打开BASE电源.十三.如何将”Final Offset”及”Matrix measure” data注册到CPU上?两点说明:Base CPU更换:会将”Final Offset”数据(head各数据)注册到the Base PC card.Module CPU更换: 会将”Matrix measure data”(X/Y轴各数据)&”Pallet levelmeasure value”(FEEDR倾斜度数据)注册到Module CPU.1.注册”Final Offset”的步骤如下:a.打开附属软件,准备好备份的offset data.b.选择好对应的模组,再点击[Calibration].c.点击[send offset file].d.选择对与模组serial number及head serial number相一致的offset file,然后点击[send file]发送选择好的文件.2.注册”Matrix measure data”的步骤如下:a.在机器主画面选择[Manual command]-[Diagnosis command],将其切换到工程画面.b.在安装有NXT附属软件的PC电脑上安装the Matrix measure software (方法略),选择需要loading 软件的模组,点击[Remote operation]-[Direct load].c.点击[Start loading].d.当loading完Matrix measure 数据写入之后,机器会自动重启,当机器主画面变成”ready’状态等待下一步操作的时候按下操作面板上的[Manual]键.e.选择好模组,点击[Calibration].f.点击[Register Matrix data].g.选择对the Matrix measure data file.(注意文件名要与模组的serial number相对应).h.点击[Register],.i.完成之后重新启动机器,退出Matrix mode.3.从备份文件注册”feeder pallet level measure results”到CPU的步骤如下:a.方法与注册”Final Offset”的步骤相同,注意在[feeder pallet level measure]画面,选择对应机器模组编号的备份文件.十四.如何检查NXT与主控电脑之间的通信?1.打开FLEXA软件,点击[Factory lines].2.选择线别,鼠标右击[Edit line],在弹出的画面中Line status项选择real line,点击[OK].3.在弹出的画面”report changes to line-Fuji Flexa”中点击[OK].十五.如何测量Matrix数据?首先,要明白什么是Matrix Measurement?每一个XY-robot(XY-自动工作头)都有个体性的差异且组装前后在垂直度上都不尽相同.这些变化造成了X-/XS-/Y-轴的实际位置与吸嘴(元件贴装或MARK读取时)的期望位置之间的差异.齿轮偏心率的变化会进一步加大这种差异, Matrix Measurement(矩阵测量)的目的就是要补偿这种差异.做的方法是用一张Matrix Panel(专用PCB板)并移动X-/XS-/Y-轴到预先指定的位置来测量实际位置与期望位置之间的OFFSET(偏差),这些偏差就叫做’Matrix Measurements’.注:·测量之前要IDLE机器至少30分钟以上来浸润润滑油.·为了人身安全,进入机器里面之前一定要按下紧急开关.·在模组上安装好the camera head之后一定要观察the camera head不能与模组其他地方有冲突.当Y轴移动到机器前面的时候the camera head可能会与模组的本体相碰撞.另外,一定要移走紧挨着待测量模组的下一个模组,否则,连接camera head与mark camera的harness(绑带)会与下一个模组或Y轴相冲突,单轨或双轨的conveyor也不能挨着待测量模组.开始Matrix Measurement测量前的一些准备工作.1.disable(取消) the XS-interlock sensor.已M3模组为例,机器通过XS轴的移动在最大范围内读取MARK点.在平常的生产当中the XS-interlock sensor会监视引起冲突的区域范围.但在MatrixMeasurement时需要取消the interlock sensor 的功能.方法是关机改一下module control box上面的跳线设置.2.将camera head装到机器上.1).关掉电源装上camera head.2).接上camera head顶上的接口(只连接右手边的接口).3).拔掉mark camera后面的IEEE1394接口.4).将camera head的母插口插到上面第3).步骤拔掉的插口上.5).连接camera head的公插口到mark camera上.如下图:6).将Y轴慢慢移到模组后面检查一下上面连接好的接口有没有与Y轴相冲突,这些接口可能会伸出mark camera的后面导致冲突,在camera head前面检查一下harness不要与Y轴相冲突.7).装好camera head,在”wake”条件下保持通电2小时以上(这是为了加热mark camera和head camera里面的电子元件以防止因温度变化而导致数据读取的丢失).8).将模组取下,在Base与Module连接的50pin Connector上插上Connector Jig,夹紧模组的夹紧气缸,在模组前后推动气缸的前极限开关上放一个磁铁,然后用纸感应一下模组SET检查SENSOR.如下图:9).确定模组被正确夹紧.3.进行Matrix Measurement的步骤如下:1.从附加软件下载the Matrix Measurement software.1).在待测模组的操作面板上按下[Manual]键.2).选择[Diagnosis]-[Start],将显示画面切换到工程画面(Engineering Panel).3).为了执行Matrix Measurement,需要下载专门的软件到机器上,这种下载的过程叫做”direct loading”.方法是在光驱中插入NXT软件光盘,点击[DirectLoadSoft]-[Matrix]来更新the Matrix Measurement software.4).然后打开IE浏览器打开NXT附属软件选择需要direct loading的模组,点击[Remote operation].5).点击[Direct load]6).点击[Start loading].7). direct loading完成以后机器会自动重启进入到Matrix Measurement.8).机器启动完成后按一下[Manual]键.9).打开附加软件,选中模组,点击[Calibration].10).点击[Matrix Measurement].11).为Matrix Jig指定误差参数文件.例如:MTR0A00020112).在”Module Body Serial No.”对话框内输入对应模组的serial number.13).点击[Measure].14).这是机器主画面上有一信息提示取走轨道上的matrix board,如果轨道上有matrix board请取走,然后按下[Start]键.15).机器自动调整完轨道宽度后会请求放入Matrix Measurement board,按下面要求放入Matrix Measurement board:不要将涂有白色胶的那一面朝上已便于可以看到上面的reference mark和轨道上的mark点.如果读不到mark点,机器会检测到错误,在这种情况下,重新放一下板,消除错误,再按一下[start]键.16). [start] 键按了以后, 机器将检查测量板的参考点﹑热膨胀量、Matrixboard的倾斜度, 然后没问题的话, 会继续进行测量.机器会显示Matrix board的倾斜度检查结果(板的四角的高度差).如果板的倾斜度超过误差值,机器会停止检测回到重新放板的画面,按要求重新放一下板再按一下[start]键.如果检测结果在误差范围内(1000µm),机器会自动开始测量,在测量板的倾斜度的时候可以按[Cycle Stop]键停下来检查,四个角的倾斜度差越小越好.17).在测量期间,按下[Monitor]键可显示板左上面的影像处理结果,如果影像处理结果超出了下面的范围,请重新调整Matrix board的位置直到落在误差的范围内.Tolerance H:328 +/- 10(X方向)V:248 +/-10 (Y方向)Tilt of V value(V值倾斜度):2个pixels内(当相机从Matrixboard的左端测到右端的时候V值的变化范围在2个pixels内)18).当影像处理结果落在上面误差范围内的时候,可以按下[Cycle Stop]键来中断测量,按下[Start]来继续测量.对M3模组测量大约花费45分钟,对M6模组大约花费30分钟.19).当测量结束的时候,按照操作面板上的信息提示,移走机器里面的matrixboard,按下[OK]键.20).在附加软件里面点击[Stop], Matrix Measurement进度状态栏显示99%.21).选择[Save the matrix data].指定目标文件来保存the matrix data.22).选择需要保存the matrix data的模组,然后点击[Calibration].23).点击[Save matrix data].24).点击[Save].25).关掉模组的电源.26).将module control box上面的跳线设置还原.十六.当机器出现运转异常或者出现错误信息无法解决的时候怎样来获取NXT TRACE DATA?主要有下面四种方法:一.当机器有错误发生时.当机器发生错误停了下来或发生OS错误(操作系统错误),但机器仍然与模组保持着通讯.方法:保持机器在原来状态,打开附加软件获取TRACE DATA,选择[Dataacquisition]-[Acquire data].二.生产过程中机器运转出现异常,但没有显示任何错误信息.方法:1. 观察到机器出现异常运转现象的时候,立刻按下[Cycle stop]键或[Emergency stop]按钮来停止机器运转.2. 保持机器在停止状态, 打开附加软件获取TRACE DATA,选择[Data acquisition]-[Acquire data].三.当机器发生OS ERROE(操作系统错误)或者出现企鹅界面时(不能够与机器进行通讯).方法:1.关掉Breaker.2.打开Breaker. (建议停20秒)3.当模组完成启动变成睡眠状态时,开附加软件获取TRACE DATA,选择[Data acquisition]-[Acquire data].四.机器没有显示”OS”错误,但附加软件不能与模组通讯.方法:1.关掉Breaker.2.打开Breaker. (建议停20秒)3.重新启动模组之后,操作面板上的”standby”指示灯变亮,然后这个灯开始闪烁,当这个灯停止闪烁再变亮同时屏幕上显示信息的时候,同时按下OK和CANCLE键.4.当屏幕上显示”OS ERROR......”信息的时候,同时松开两个按键.5.当模组启动起来, 变成睡眠状态时,开附加软件获取TRACEDATA,选择[Data acquisition]-[Acquire data].6.将收取下来的数据放在同一个文件夹内,文件夹命名的格式按照错误发生的日期和错误描述进行命名.在”OS ERROR”,第三,第四情况下获得的TRACE DATA 里面有下面三种文件:ApOsErr.bin;ServoOsE.bin;VaOsErr.bin. 在其他情况下,获得的TRACE DATA 里面有下面七种文件:AllCalib000.txt;Aplog.bin;Module.ker;Module.par;BaseLo g.bin;ServoLog.bin;VaLog.bin十七.怎样解决机器通讯故障(communication error)?现象 发生的位置 可能造成的原因措施Base 上的所有模组 1. Base CPU Box 与1394HUB 之间的接口接触不良或中断 2. Base CPU Box 坏掉. 3. 1394HUB 坏掉.1.重新插拔Base CPU Box 与1394HUB 之间的接口.检查harness 是否坏掉(下图中蓝色部分).2.更换harness(连接线).3.更换Base CPU Box4.更换1394HUB.开机机器在启动到”communication”这一项时停止,出现错误”1394 Communication Error”.特定的模组.1. 1394HUB 和Module 之间的接口接触不良或线路中断.2. 1394HUB 上特定的接口或网线坏掉.3. Module CPU Box 坏掉.1. 重新插拔Module CPUBox 与1394HUB 之间的接口.检查harness 是否坏掉(下图中红色部分).2. 更换harness(连接线)3. 更换1394HUB.4. 更换Module CPU Box现象 发生的位置 可能造成的原因 措施Base上的所有模组 1.Board transfer I/Fboard与模组1的接口接触不良或连接的线路中断.2.Board transfer I/Fboard坏掉. 1.重新插拔一下Boardtransfer I/F board与模组1之间的接口,检查一下连接网线(harness)是否坏掉.如下图中的蓝色区域.2.更换harness(连接线路)3.更换Board transfer I/Fboard.特定的模组.*只针对第三个模组.1.Conveyor controlboard坏掉.1.更换Conveyor controlboard.如下图中的绿色区域.机器启动的时候出现报警:conveyor communicationerror(errorcode”0701”:failed conveyor controller communication occurred.)特定的模组.*只针对第五个模组或后面的模组.1.该模组与前面那个模组Conveyor controlboard之间的线路接口接触不良或线路中断.1.重新插拔一下线路接口,检查一下连接线路(harness)是否坏掉.如下图中红色区域所示.2.更换harness(连接线路).现象 发生的位置 可能造成的原因 措施机器启动的时候出现报警:Servo communicationerror(errorcode”2d18”:failed servo wake)只出现在特定的模组上.1.Module CPU Box与Module Servo Box之间的线路接触不良或线路中断.2.Module Servo Box坏掉.3.Module CPU Box坏掉.1.重新插拔一下ModuleCPU Box与ModuleServo Box之间的线路接口,检查一下连接的线路是否中断.如下图中蓝色区域.2.更换Module ServoBox.3.更换Module CPU Box现象发生的位置可能造成的原因措施机器启动的时候出现报警:LAN communication error.(Errorcode”86312108: Job open error” occurred and failedcommunication with HOST.)BASE 1. LAN CABLE(网线)接触不良或中断. 2. BASE CPU BOX 坏掉. 1. 重新插拔网线接口,检查网线是否中断.下图中蓝色区域部分.2. 更换网线.3. 更换BASE CPU BOX.现象发生的位置可能造成的原因措施模组 1. Module CPU Box;Pallet;RemoteI/O Board;Head PCB 之间的线路接触不良或线路中断. 2. 上述板卡某个坏掉.1. 重现插拔线路接口,检查板卡之间的线路是否中断.如下图中的红色区域所示.2. 更换坏的线路.3. 更换坏的板卡. 开机机器启动到CU_NET 一项时出现错误:CU_NET communication error.BASE1. Base CPU Box 与Remote I/O Board之间的线路接触不良或线路中断.2. Remote I/O Board 上的跳线设置错误.1. 重现插拔线路接口,检查板卡之间的线路是否中断.如下图中的蓝色区域所示.2. 检查switch1的跳线设置.(8M BASE Remote I/O Board4上的SW1应短接;4M BASE Remote I/O Board2上的SW1应短接.十八.怎样对Y-,X-,XS-axis原点进行校正?在下面三种情况下需要对每个轴进行原点校正:·更换MOTOR.·轴的机械定位装置或连轴器跑位.·轴的丝杠磨损.为了进行校正,需要这两个软件:I/O Monitor; Motion Tool mini,请在校正之前按照下面目录安装这两个软件:* I/O Monitor: NXT\IOMonitor* Motion Tool mini: NXT\Tool\ MotionToolmini.exe1.为了校正每一个轴的原点,需要打开几个OUTPUT的I/O信号,及清除一些multi turn记忆.请按照下面的步骤来执行:1).打开I/O Monitor,双击即可.2).当窗口打开时,选择[start].3).输入BASE的IP地址,点击[OK].Update Interval选择默认值500.4).在page栏选择[CPU],在module栏选择目标模组[Module#].5).在[Output signal]左边的小方框内打上”√”号,将下面三项输出选择[ON/OFF]打开或关闭:选择Y00D Servo Control power and Head power ON选择Y002 Master ON选择Y001 Machine ready to ON,再OFF, 再ON.6).选择[head]-[CPU].7).检测机器servo amp的LED处于ON的状态.2.开始执行MotionToolmini.exe1).输入BASE的IP地址及模组的NO.,点击[connect].2).选择[Wake]-[Automatic recognition],等待大约10秒钟,机器的脉冲counter就会显示出来.3).将HEAD移到每一个轴的MOTOR这一边不动为止.(直到它轻轻接触).4).在Motion Tool mini对话框上点击[MT],在[Execute]一栏的目标轴的方框内打”√”号,然后点击[Execute MT reset]来reset “the multi-turn”记忆信息(注意1.这仅仅是reset马达转动圈数的 “the multi-turn”记忆信息,而不是将马达的原点设为零;2.机器主画面必须为工程画面.3.换MOTOR;各轴;及头部电池都要做MT).5).为了进行机械位置的校正,需要使用下面图中的一些jig来校正每一个轴的原点.6).首先,介绍一下X 轴原点校正的步骤.M3模组与M6模组的校正方法一样,只是调校的数值不同而已,如下图所示:具体步骤如下:(注意:1.不要忘了步骤1.里面的5).打开OUTPUTY001/Y002/Y00D;2.将模组主画面切换到工程画面.)1.把JIG安装在右图所示的位置.把XS-Axis和X-Axis单元都轻轻往左推,直到他们都接触到JIG.2.把X-Axis接触到JIG.在这个位置,M3模组X-Axis的Servo Counter应该显示的是-75000+/-500pulse(M6模组应该是-65000+/-500pulse).3.如果这个数值不对,就要校正X-Axis原点位置.4.用一开口扳手卡住下面的齿轮,将上面齿轮4个bolts松开,拿掉2个放到另外两个hole内,将上面齿轮顶出,再将固定MOTOR的3个螺丝松掉可将MOTOR 拆下换掉.5.安装齿轮时注意齿轮上下平面要一致,调整Motor origin时用开口扳手卡住下面齿轮,用一字螺丝刀旋转X Motor Axis到原点再锁紧4个固定螺丝(要同步锁).6.检查一下Servo Counter应该显示的是-75000+/-500pulse(M6模组应该是-65000+/-500pulse).7.用扭矩扳手拧紧齿轮固定螺丝(3.92N/M).。
NXT机器人培训教案第一篇:NXT机器人培训教案第一课搭建第一个NXT机器人授课时间参加教师活动目的:(一)分组1、3—4人一个组,选出组长、项目研究员、程序员、机械设计师;2、为小组取一个组名。
(二)认识NXT核心元件1、对9797套装进行分类;2、认识NXT核心元件;3、搭建蓝牙机器人9797套装8___24页;活动过程:一、LEGO NXT的几张酷图欣赏二、认识乐高组件1、轴、梁、轴套、半轴套、齿轮2、传感器3、控制器三、了解乐高组件的基本搭建技巧。
1、搭建基本机器人2、参照搭建手册搭建风车,了解齿轮的运用共8页第1页第二课让机器人动起来授课时间参加教师活动目的:(一)分组1、2人一组,选出组长2、为小组取一个组名。
(二)内容1、了解NXT编程软件界面2、学习移动模块、电机模块,并在此基础上掌握计器人的前进、后退、转弯。
3、掌握机器人转弯的几种方法。
教学过程一:认识编程软件MINDSTORMS Edu NXT界面1、启动MINDSTORMS Edu NXT在桌面上点击:2、界面的组成:编程区,面板区,学习区,菜单区、工具栏区、控制面板二、任务:让机器人“倒车入库”1、任务分析:第一步:机器人前进;第二步:机器人右转弯第三步;机器人后退;2、模块介绍3、编程共8页第2页4、学习练习三、机器人转弯的三种情况1、差速转弯:2、一个电机正转,另一电机反转来实现转弯3、一个电机不动,另一电机转动(推荐方式)(1)使用移动模块,只选择一个电机(2)使用电机模块共8页第3页第三课让机器人随着声音动起来授课时间参加教师活动目的:1、学习循环模块的使用2、学习声音传感器的使用3、学习分支模块的使用活动过程一:机、2、使用循环模块二、、如何测定电机的运行时间三、让机器人随着声音动起来让机器人听到声音时开始运动,当机器人前方出面障碍物时,并后退转弯再前进。
共8页第4页1、介绍等待模块共8页第5页第四课巡线机器人授课时间参加教师活动目的:1、了解光电传感器的原理2、初步掌握光电传感器对光的测量方法3、了解单光电传感器巡线的原理活动过程一、光电传感器的原理1、光电传感器由光电接收管和光电发射管组成。

nxt(乐高)中文教程一、教学内容本节课的教学内容选自《NXT(乐高)中文教程》第一章第四节,主要介绍如何使用NXT的传感器和执行器进行简单的编程控制。
具体内容包括:温度传感器的使用、触摸传感器的使用、电机的基本控制和传感器数据的读取与显示。
二、教学目标1. 学生能够理解NXT的基本组成部分及其功能。
2. 学生能够掌握温度传感器和触摸传感器的使用方法。
3. 学生能够通过编程控制电机实现基本运动。
三、教学难点与重点重点:NXT的基本组成部分及其功能、温度传感器和触摸传感器的使用方法、电机的基本控制。
难点:传感器数据的读取与显示、编程控制电机实现复杂运动。
四、教具与学具准备教具:NXT套件、电脑、编程软件。
学具:每位学生一台NXT套件、每组一台电脑、编程软件。
五、教学过程1. 实践情景引入:让学生观察并描述NXT的外观和组成部分。
2. 知识点讲解:介绍NXT的基本组成部分及其功能,如电机、传感器、触摸屏等。
3. 例题讲解:示范如何使用温度传感器和触摸传感器进行编程控制。
4. 学生动手实践:让学生分组进行编程实验,使用温度传感器和触摸传感器控制NXT的运动。
5. 随堂练习:让学生编写程序,实现使用传感器数据控制NXT的运动。
6. 知识拓展:介绍如何使用编程软件进行电机控制和传感器数据的读取与显示。
六、板书设计板书内容:NXT基本组成部分及其功能、温度传感器和触摸传感器的使用方法、电机的基本控制。
七、作业设计1. 请用编程软件编写一个程序,实现使用温度传感器控制NXT的运动。
答案:根据温度传感器的数据,控制NXT的电机进行相应的运动。
2. 请用编程软件编写一个程序,实现使用触摸传感器控制NXT的运动。
答案:根据触摸传感器的状态,控制NXT的电机进行相应的运动。
八、课后反思及拓展延伸本节课学生掌握了NXT的基本组成部分及其功能,能够使用温度传感器和触摸传感器进行编程控制。
但在传感器数据的读取与显示方面,部分学生仍存在困难,需要在课后加强练习和指导。

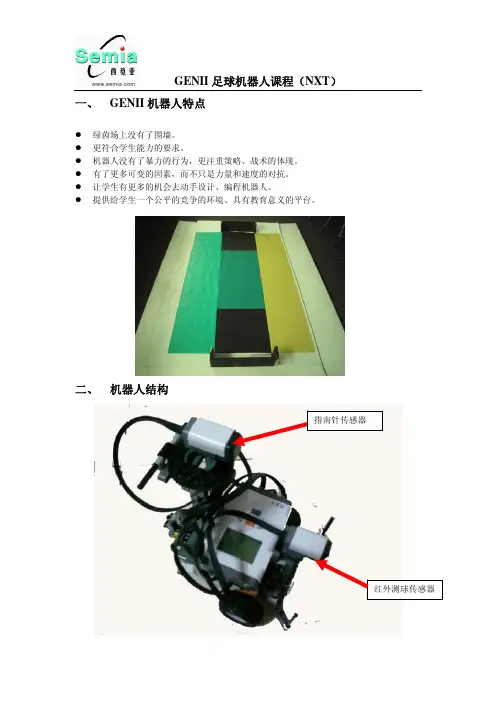
GENII足球机器人课程(NXT)一、 GENII机器人特点z绿茵场上没有了围墙。
z更符合学生能力的要求。
z机器人没有了暴力的行为,更注重策略、战术的体现。
z有了更多可变的因素,而不只是力量和速度的对抗。
z让学生有更多的机会去动手设计、编程机器人。
z提供给学生一个公平的竞争的环境、具有教育意义的平台。
二、 机器人结构指南针传感器GENII 足球机器人课程(NXT )图2普通光电传感器2GENII足球机器人课程(NXT)在本课程中,传感器和马达连接的端口如图所示,在后面的程序讲解中将会用到各个传感器的作用:红外飞眼:该传感器用于识别足球1-9的方位,如图所示:指南针传感器:该传感器用于识别机器人的方位,正确判别机器人进攻方向和防守方向,其精度为1度。
光电传感器1:该传感器用于识别场地不同的位置,以便更好的进攻光电传感器2:该传感器用于识别近距离的球和远距离的球。
GENII 足球机器人课程(NXT )三、进攻机器人的思路继续原地旋转找四、飞眼传感器和指南针传感器使用本课程采用ROBOLAB29编写,所以所有图标都将以ROBOLAB29为基础。
飞眼传感器介绍NXT 红外足传感器是检测红外线的传感器,比如RCJ 中使用的红外足球。
.要测试红外足球传感器,将传感器插入NXT1号端口,并选择 View – Ultrasonic cm – Port 1. 当你在红外源前面从右到左旋转传感器,你会发现读数从1-9变化,GENII 足球机器人课程(NXT )如果没有红外源,返回值将是零,在VIEW 模式中显示问号。
它只是显示方向,注意如果你附近有太阳光线,那么有可能会产生干扰。
红外足球传感器方向值1表示左后方,5表示正前方,9表示右后方,如果值为零,表示无红外线。
除了方向外,红外足球传感器也可以返回红外线相对强度可以通过5个检测元素(看红外足球传感器图标说明)来估算距离。
在ROBOLAB29的使用方法:在ROBOLAB 没有专门的红外飞眼的图标,但是可以使用超声波的图标,来表示红外飞眼,比如下面这个程序是实时显示该传感器的方位值,如图:运行该程序后,那么在NXT 屏幕上就会显示0-9的数字(0表是无球)。
第1课认识NXT机器人的硬件一、教学目标:1.了解NXT机器人的组成及特性2.对机器人感兴趣二、教学重难点:1.NXT的硬件2.机器人的三个原则教学环节学生活动教师提供的帮助与指导设计意图预案调整激趣导入LEGO NXT的几张酷图欣赏播放NXT图片激发学习兴趣,活跃课堂气氛。
任务驱动动手实践1.认识NXT机器人的组成。
2.认识控制器的特性3.认识伺服电机的特性4.认识NXT传感器5.认识NXT蓝牙特性6.打开、关闭NXT控制器1.介绍NXT各部分名称NXT机器人硬件是由 NXT控制器、伺服电机、传感器等组成。
NXT控制器就像人的大脑,伺服电机好比人的肌肉,提供动力,传感器就像人的五官,采集外界环境的数据,然后反馈回大脑进行处理。
2.介绍各部分特性3.组织学生动手实践操作。
在完成任务的过程中,培养学生分析问题、解决问题的能力,培养学生的动手实践能力。
课堂小结学生相互展示成果、欣赏作品,师生共同评价,教师对完成情况好的学生和帮助他人的学生给与表扬。
教师引导学生进行总结,针对本节课的重点知识进行提问,了解学生对相关知识的掌握。
引导学生对所学的知识进行梳理。
反思重建第2课认识NXT控制器菜单一、教学目标:1.认识NXT控制器全会外观2.学会操作NXT控制器菜单二、教学重难点:1.熟练操控NXT菜单2.控制NXT音量第3课NXT机器人编程软件一、教学目标:1.认识MINDSTORMS软件窗口。
2.正确使用软件中的图标和连线。
二、教学重难点:1.能正确使用软件的菜单功能。
2.正确使用软件中的图标和连线。
2.任务:尝试更改NXT名称标识点击弹出 NXT 窗口,能查看 NXT 连接状态、可用内存空间、电池电量和固件版本第4课我的第一个程序一、教学目标:1.学会用MINDSTORMS编写程序。
2.尝试编写第一个程序。
二、教学重难点:1.学会下载程序。
2.在NXT菜单中运行程序。
2.学生动手尝试实践。
1.掌握内置发音模块的使用。
NXT培训教案NXT培训教案一、介绍1.1 项目背景简要描述该培训教案的目的和背景。
1.2 培训目标列出培训的具体目标,如提高学员对NXT的理解和应用能力等。
1.3 适用对象指明该培训适用的学员对象,如学生、教师、技术爱好者等。
1.4 培训资源提供所需的培训资源清单,如NXT套件、计算机设备、教学软件等。
二、NXT基础知识2.1 介绍NXT详细介绍NXT的硬件组成和功能特点。
2.2 NXC编程语言简介简要介绍NXC编程语言的基本语法和特性。
2.3 传感器和执行器介绍NXT的各种传感器和执行器,如触碰传感器、颜色传感器、舵机等。
三、NXT编程实践3.1 环境搭建指导学员安装和配置NXT和编程环境。
3.2 简单程序设计教授学员如何编写简单的NXT程序,如的移动、灯光控制等。
3.3 传感器应用引导学员探索传感器的应用,如通过触碰传感器实现避障功能等。
3.4 高级程序设计教授学员如何编写更复杂的NXT程序,如使用循环和条件语句实现多功能控制等。
四、项目实践4.1 项目选题提供几个可供选择的项目选题,并解释其实践意义和技术难点。
4.2 项目开发指导学员根据选题进行项目开发,包括需求分析、程序设计、调试等过程。
4.3 项目展示安排学员展示他们完成的项目,并进行评估和反馈。
附件:1.NXT套件清单提供包括NXT、传感器、执行器等在内的套件清单。
2.NXC编程环境安装指南提供安装和配置NXC编程环境的详细步骤。
法律名词及注释:1.版权:指某个作品的原创者对该作品享有的法律保护权益。
2.知识产权:指人们在创作中形成的独立见解和创意的产权。
3.隐私权:指个人对其个人信息的保护和控制权利。
4.著作权:指个人或团体在创作中创造的固定表达形式的作品所享有的权利。
NXT机器人培训教案教案NXT培训教案一、教学目标1.让学生了解NXT的基本结构和功能。
2.培养学生运用NXT进行编程和搭建的能力。
3.提高学生的团队合作意识和创新能力。
二、教学内容1.NXT基本结构介绍2.NXT编程软件的使用3.NXT搭建方法4.NXT项目实践三、教学方法和手段1.采用讲解、演示、实践相结合的教学方法。
2.运用多媒体教学手段,展示NXT的相关知识和操作过程。
3.引导学生进行团队合作,共同完成项目。
四、教学步骤1.导入新课:介绍NXT的背景和意义,激发学生的学习兴趣。
2.讲解NXT基本结构:介绍NXT的各个部件及其功能,让学生对NXT有整体的认识。
3.演示NXT编程软件的使用:现场演示编程软件的操作步骤,让学生了解如何编写程序控制NXT。
4.讲解NXT搭建方法:讲解NXT的搭建原理和步骤,让学生掌握搭建NXT的基本技能。
5.项目实践:将学生分成若干小组,每组负责完成一个NXT项目。
教师巡回指导,解答学生疑问。
6.作品展示与评价:各小组展示自己的NXT项目,进行自评、互评和教师评价,总结项目实践中的收获和不足。
7.课堂小结:回顾本节课所学内容,强调NXT编程和搭建的重要性,鼓励学生在课后继续探索和实践。
五、教学评价1.过程评价:观察学生在课堂上的参与程度、合作意识和创新能力,给予及时反馈。
2.作品评价:评价各小组的NXT项目,关注项目的完整性、创新性和实用性。
3.学生自我评价:鼓励学生反思自己在项目实践中的表现,总结经验教训。
六、教学资源1.NXT套件2.编程软件3.多媒体课件4.搭建图纸七、教学建议1.针对不同学生的学习基础和兴趣,适当调整教学内容和难度。
2.鼓励学生动手实践,培养实际操作能力。
3.注重团队合作,培养学生的沟通能力和协作精神。
4.鼓励学生创新思维,提高解决问题的能力。
5.定期举办NXT竞赛和展示活动,激发学生的学习兴趣和动力。
本教案旨在培养学生对NXT的认识和兴趣,通过讲解、演示、实践相结合的教学方法,使学生掌握NXT的基本编程和搭建技能。
第一课搭建第一个NXT机器人
授课时间参加教师
活动目的:
(一)分组
1、3—4人一个组,选出组长、项目研究员、程序员、机械设计师;
2、为小组取一个组名。
(二)认识NXT核心元件
1、对9797套装进行分类;
2、认识NXT核心元件;
3、搭建蓝牙机器人9797套装8___24页;
活动过程:
一、LEGO NXT的几张酷图欣赏
二、认识乐高组件
1、轴、梁、轴套、半轴套、齿轮
2、传感器
3、控制器
三、了解乐高组件的基本搭建技巧。
1、搭建基本机器人
2、参照搭建手册搭建风车,了解齿轮的运用
第二课让机器人动起来
授课时间参加教师
活动目的:
(一)分组
1、2人一组,选出组长
2、为小组取一个组名。
(二)内容
1、了解NXT编程软件界面
2、学习移动模块、电机模块,并在此基础上掌握计器人的前进、后退、转弯。
3、掌握机器人转弯的几种方法。
教学过程
一:认识编程软件MINDSTORMS Edu NXT界面
1、启动MINDSTORMS Edu NXT
在桌面上点击:
2、界面的组成:编程区,面板区,学习区,菜单区、工具栏区、控制面板
二、任务:让机器人“倒车入库”
1、任务分析:
第一步:机器人前进;
第二步:机器人右转弯
第三步;机器人后退;
2、模块介绍
3、编程
4、学习练习
三、机器人转弯的三种情况
1、差速转弯:
2、一个电机正转,另一电机反转来实现转弯
3、一个电机不动,另一电机转动(推荐方式)(1)使用移动模块,只选择一个电机(2)使用电机模块
第三课让机器人随着声音动起来
授课时间参加教师
活动目的:
1、学习循环模块的使用
2、学习声音传感器的使用
3、学习分支模块的使用
活动过程
一:机
、
2、使用循环模块
二、、如何测定电机的运行时间
三、让机器人随着声音动起来
让机器人听到声音时开始运动,当机器人前方出面障碍物时,并后退转弯再前进。
1、介绍等待模块
第四课巡线机器人
授课时间参加教师
活动目的:
1、了解光电传感器的原理
2、初步掌握光电传感器对光的测量方法
3、了解单光电传感器巡线的原理
活动过程
一、光电传感器的原理
1、光电传感器由光电接收管和光电发射管组成。
他能够接收外界光的强度,并把光的强度
换算成0-100的值。
2、影响光电传感器的因素
颜色、距离、质地等三个因素,是影响光电传感器的主要因素。
实验1、用光电传感器测量不同颜色的物质的值;
实验2、用光电传感器测量同一物质在不同距离的值
将一白色的物质,从近到远,测出传感器的值的变化
实验3、测量白色陶瓷片和白色的纸的反射值
3、光电传感器的用途
光电传感器的用途很多,比如识别颜色、判断距离等等。
今天我们主要学习利用光电传感器让机器人巡线,即让机器人在场地顺着黑色运动。
二、机器人巡线的基本原理
光电传感器
单光电传感器的巡线原理:
光电传感器没有检测到黑线,就向黑色一方转,当光电传感器检测到黑线地,就向远离黑线的另一方转动。
这样就可以让机器人顺着黑线前进。
第五课时齿轮的使用
教学内容:
1、了解齿轮的相关术语
2、了解齿轮的加速和减速的关系及优缺点
3、了解不同齿轮的搭建方法
一:齿轮的相关术语
1、乐高的齿轮分类
普通齿轮、斜齿轮、双面斜齿轮、差速齿轮、涡轮
2、齿轮的单位和齿数
三、加速和减速的原理
它的每一个齿都与8齿的两个齿啮合的很好。
当转动24齿,每一次在齿轮的接触面一个新齿取代前一个齿时,8齿也刚好转过一个齿,因此,大齿轮转过8个齿(24齿的齿轮)就可以让小齿轮转过一圈(360度)。
当大齿轮再转过8个齿时,小齿轮又转了一圈。
在你转动24齿齿轮的最后8个齿时,8齿齿轮转过第三圈。
这也是两轴产生不同速度的原因:24齿齿轮转动一圈,8齿齿轮转动了三圈!我们用两个齿轮齿数之比来表示两者的关系:24比8。
经过简化,得到3:1。
从数字来看,24齿齿轮1转就相当与8齿齿轮的3转。
由此,我们得到一种加速的方法(从技术角度来将应称为角速度,而不是速度)。
这时候你可能会想到在竞速小车上使用巨大的传动比。
遗憾的是,在力学中有得必有失,获得了速度,同时就减少了扭矩,简单的说,就是在力量上的损失会转化为速度——速度越快,扭矩就越小。
比率也相同:如果获得了三倍的角速度,你的扭矩会减小到原来的1/3。
什么时候应当加速或减速传动,经验会告诉你。
总的来说,减速传动用的比加速传动要多,因为马达会产生很高的速度,但扭矩很小。
在多数时候,常减小速度来提高扭矩,让小车能爬上斜坡,或者让机器人的手臂举起物体。
在你不需要大扭矩时,可以减小速度来精确定位。
四、齿轮的搭建方式
第六课时
学习内容:
1、学习声音、等待、显示、声音传感器模块
2、编程技能练习:(1)停在桌子上
当机器人听到一个声音时,停下来;并发出一个提示声音;
(2)声音控制机器人
让机器人随着声音的大小而运动,声音越大,运动速度越快。
3、练习机器人的搭建
活动过程:
一:功能模块的学习
投影
二、编程练习
1、停在桌子上
当机器人听到声音时,开始运动。
2、声音控制机器人
三、机器人搭建练习
进一步了解齿轮的组合使用。