基于伸缩式高空作业车设计探讨
- 格式:doc
- 大小:24.50 KB
- 文档页数:6
伸臂式高空作业车施工方案一、项目背景伸臂式高空作业车是一种专业的工程施工设备,广泛应用于建筑工地、桥梁、电力线路等高空作业工程。
本文将介绍伸臂式高空作业车的工作原理、使用方法、安全措施以及施工注意事项。
二、工作原理伸臂式高空作业车主要由车身、升降臂、平台、电气控制系统等组成。
通过电动液压系统控制升降臂的伸缩,实现人员的上升和下降。
平台上设置作业控制台,方便操作员对作业进行控制。
三、使用方法1.预操作检查:–检查车身和升降臂的结构是否完好;–检查电气系统是否正常;–检查液压系统是否正常工作;–检查安全保护装置是否齐全。
2.上升和下降:–操作员通过控制台控制作业车的上升和下降;–上升过程中,注意观察周围环境,避免与建筑物或其他障碍物发生碰撞。
3.伸缩控制:–操作员通过控制台控制升降臂的伸缩;–伸缩过程中,注意观察升降臂的稳定性,避免超出安全范围。
4.作业控制:–操作员通过控制台控制平台的旋转和移动;–在作业过程中,注意观察平台的稳定性,避免超载或失衡。
四、安全措施1.装备必备:–操作员应佩戴安全帽、安全带等必要装备;–作业车应配备消防器材、急救箱等安全设备。
2.作业前的安全检查:–检查升降臂、平台、电气系统等是否正常工作;–检查周围环境是否安全,有无杂物、坑洞等隐患。
3.作业时的安全措施:–天气恶劣时,暂停作业;–避免与电力线路接触;–确保升降臂和平台的稳定性;–避免超载作业。
4.紧急情况处理:–在发生故障或危险情况时,立即停止作业;–通知相关人员进行维修或紧急救援。
五、施工注意事项1.严格按照操作手册和使用说明进行操作;2.操作员应经过专业培训和持证上岗;3.在施工现场设置警示牌和隔离带,确保施工区域安全;4.协同作业时,与其他施工人员保持良好的沟通,确保作业协调进行;5.每日结束时,对作业车及相关设备进行检查和维护,确保下次使用时的正常操作。
六、总结伸臂式高空作业车是一种重要的工程施工设备,它能提高施工效率,同时也需要严格遵守安全操作要求。
第1章绪论1.1 前言随着世界经济的大繁荣,各个行业都起了翻天覆地的改变,尤其最近几十年以来,世界各国都改变了自己的面貌,无论是在外表还是在社会内层。
在这其间,社会的建设少不了各种机械,而在这些机械中,高空作业车的重要性不言而寓。
高空作业车之所以发挥着如此大的作用,跟其自身的特点是分不开的。
高空作业车其结构紧凑、传递平稳、操作轻便、举升高,易于实现自动化控制;同时还具有机动灵活、转移速度快的特点。
它特别适于从事消防、抢险救灾、施工、安装、维护等工作,广泛应用在电力、摄影、建筑、市政、机场、工厂、园林、住宅等场所。
因此,近年来高空作业车发展很迅速,一举成了市政及其他部门主要的高空作业机械。
我国高空作业车技术的研究与国外先进水平相比还有一定的差距,还具有很大的研究空间,我们应该加大力度的研究此方面以拉近我国与国外的差距;同时,通过此次毕业设计,我可以将自己以前所学运用到设计中来,锻炼自己的动手能力和运用知识的综合能力,对我各个方面的提高将会起到很大的作用,是一次锻炼自己的很好的机会。
1.2国内外研究状况1.2.1 国内现状部分企业技术创新能力较差:部分企业不重视产品的更新和新产品的开发,产品几十年一贯制,品种规格单一、市场经营范围窄,使企业产品产量逐年下降,企业效益差。
近几年,国外高空作业机械产品纷纷进入国内,如芬兰BRONTO公司、美国的JLG 、GENIN、UP-RIGHT, SNORKEI,SKYJACK等公司以及英国、意人利、丹麦的一些著名公司在国内都相继设立了办事机构,而且在大高度产品和特殊产品中仍然占有国内主要市场,如高空绝缘作业车、蜘蛛式大高度作业平台、自行式高空作业平台等。
这些进口产品性能好、外观美,价格与国内产品相差不多,具有很强的竞争力。
缺乏高空作业车的专用底盘:高空作业车是由汽车底盘改装而成的,属于工程车辆范畴,长期处于重载状态,行驶距离短、车速慢,使用频率不高。
为便于在各种街道行驶,要求体积小、轴距短,又因其重心高,要求底盘大梁低。
高空作业车辆施工方案设计项目概述高空作业车辆被广泛应用于建筑、电力、通讯、广告等领域的安装、维护和清洁等作业。
高空作业车辆主要分为升降式、伸缩式和旋转式,根据不同工程的需要,可以选择不同类型的高空作业车辆。
通过选用合适的高空作业车辆和合理的施工方案,能够保证施工质量和工期。
方案设计选择适合的高空作业车辆高空作业车辆的选择要根据具体施工的需求来确定,需要考虑以下因素:•作业高度,作业高度决定了需要选用多高的高空作业车辆。
•作业范围,选用高空作业车辆的臂展和伸缩长度要能够覆盖整个工作区域。
•现场环境,需要根据现场环境的实际情况来选择适合的高空作业车辆,例如狭窄的空间、建筑的结构等因素需要考虑。
安全措施高空作业车辆的施工需要充分考虑安全措施,以保证作业人员和现场人员的人身安全。
•作业人员要按照相关规定进行培训,掌握操作技能和安全知识。
•作业人员要佩戴好安全带,确保在高空作业时具有防护能力。
•现场人员要设置警戒线,禁止未经授权人员进入施工区域。
•高空作业车辆必须经过检测和维护,确保机器本身安全无隐患。
施工方案针对高空作业的施工方案需要综合考虑作业类型、高度和现场环境等因素,作出具体的施工方案。
以下是具体的施工方案步骤:1.确定施工范围和施工形式,确定施工区域内的警戒线和运输通道。
2.检查高空作业车辆和安全设备是否符合要求,检查电气和液压系统是否正常运行。
3.确认高空作业车辆固定点,进行固定,同时调整车辆的角度,确保无条件视野,彻底进行安全检查。
4.开始进行高空作业,由已经接受培训的操作人员对高空作业车辆进行操作。
在作业期间,应持续检查各种安全控制设备的运行状况,确保整个施工过程的安全与稳定。
5.当施工结束后,应将高空作业车辆归位并拆除,同时清理整个施工区域,并进行必要的现场保养维护。
结论通过合理选择高空作业车辆、有力的安全措施和详细的施工方案设计,才能够确保高空作业的安全、高效、顺利进行。
在施工的过程中,作业人员需要严格按照规定进行操作,并不断的进行安全检查,只有做好这一切,才能够最大限度地避免施工过程中的安全事故,真正地实现施工的目标。
《伸缩臂叉装车行走系统优化分析与实验研究》篇一一、引言随着工程机械的不断发展,伸缩臂叉装车因其高效、灵活的作业能力,在物流、建筑、矿山等领域得到了广泛应用。
然而,其行走系统的性能直接影响到整机的工作效率和作业质量。
因此,对伸缩臂叉装车行走系统进行优化分析与实验研究,对于提升其作业效率及稳定性具有重要意义。
本文旨在分析叉装车行走系统的结构特点及性能瓶颈,通过优化设计及实验研究,提高其整体性能。
二、行走系统结构特点及性能瓶颈分析伸缩臂叉装车的行走系统主要由驱动轮、导向轮、履带等组成。
其结构特点为:通过液压驱动,实现叉装车的移动和定位。
然而,在实际使用过程中,行走系统存在着一些问题,如驱动轮磨损严重、转向灵活性差、稳定性不足等,这些问题限制了叉装车的工作效率和作业范围。
三、行走系统优化设计针对上述问题,本文提出了以下优化设计方案:1. 驱动轮优化:通过改进驱动轮的材料和结构,提高其耐磨性和承载能力,延长使用寿命。
2. 履带优化:优化履带的宽度和结构,提高其与地面的摩擦系数,增强叉装车的稳定性和越野能力。
3. 转向系统优化:通过改进转向系统的液压控制回路,实现更灵活的转向操作,提高工作效率。
四、实验研究为了验证优化设计的有效性,本文进行了以下实验研究:1. 驱动轮耐磨性实验:通过模拟实际工况,对优化前后的驱动轮进行耐磨性测试,对比分析其性能差异。
2. 稳定性实验:在不同工况下,对优化前后的叉装车进行稳定性测试,分析其稳定性的改善情况。
3. 转向灵活性实验:通过对比优化前后叉装车的转向操作时间,评价其转向灵活性的提升程度。
五、实验结果与分析1. 驱动轮耐磨性实验结果:经过耐磨性测试,优化后的驱动轮相比优化前,磨损程度明显降低,使用寿命得到延长。
2. 稳定性实验结果:在不同工况下,优化后的叉装车相比优化前,稳定性有明显提升,特别是在复杂地形条件下,其越野能力得到显著增强。
3. 转向灵活性实验结果:通过对比转向操作时间,优化后的叉装车转向更加灵活,操作更加便捷。
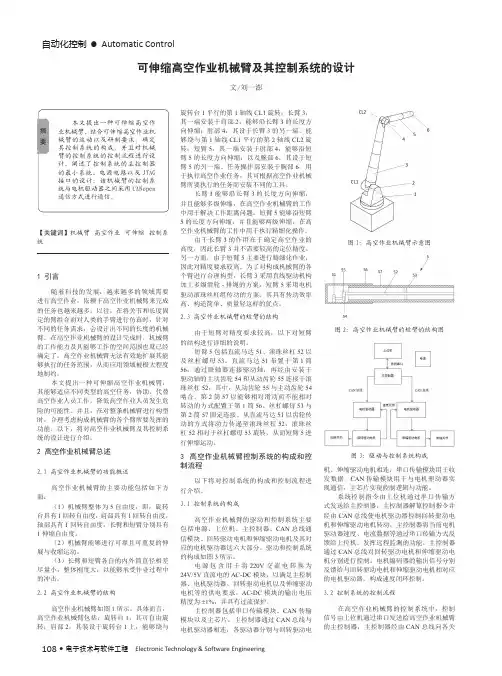
自动化控制• Automatic Control108 •电子技术与软件工程 Electronic Technology & Software Engineering【关键词】机械臂 高空作业 可伸缩 控制系统1 引言随着科技的发展,越来越多的领域需要进行高空作业,依赖于高空作业机械臂来完成的任务也越来越多。
以往,在将关节和长度固定的臂组合而对人类的手臂进行仿真时,针对不同的任务需求,会设计出不同的长度的机械臂。
在高空作业机械臂的设计完成时,机械臂的工作能力及其能够工作的空间范围也就已经确定了。
高空作业机械臂无法有效地扩展其能够执行的任务范围,从而应用领域被极大程度地制约。
本文提出一种可伸缩高空作业机械臂,其能够适应不同类型的高空任务,协助、代替高空作业人员工作,降低高空作业人员发生危险的可能性。
并且,在对整条机械臂进行构型时,合理考虑构成机械臂的各个臂所要发挥的功能。
以下,将对高空作业机械臂及其控制系统的设计进行介绍。
2 高空作业机械臂总述2.1 高空作业机械臂的功能概述高空作业机械臂的主要功能包括如下方面:(1)机械臂整体为5自由度,即,旋转台具有1回转自由度,肩部具有1回转自由度,轴部具有1回转自由度,长臂和短臂分别具有1伸缩自由度。
(2)机械臂能够进行可靠且可重复的伸展与收缩运动。
(3)长臂和短臂各自的内外筒直径相差尽量小,整体刚度大,以能够承受作业过程中的冲击。
2.2 高空作业机械臂的结构高空作业机械臂如图1所示。
具体而言,高空作业机械臂包括:旋转台1,其可自由旋转;肩部2,其装设于旋转台1上,能够绕与可伸缩高空作业机械臂及其控制系统的设计文/刘一澎旋转台1平行的第1轴线CL1旋转;长臂3,其一端安装于肩部2,能够沿长臂3的长度方向伸缩;肘部4,其设于长臂3的另一端,能够绕与第1轴线CL1平行的第2轴线CL2旋转;短臂5,其一端安装于肘部4,能够沿短臂5的长度方向伸缩;以及腕部6,其设于短臂5的另一端。
伸缩式高空作业车稳定性分析及优化设计马江民1 熊新红1 朱春东1,2 余中全1 张 瑜31武汉理工大学 武汉 430063 2随州武汉理工大学工业研究院 随州 4413003蓝剑航天空间科技股份有限公司 北京 100176摘 要:高空作业车的稳定性是安全评价的重要指标,直接影响高空作业车整车的整体性能及作业的安全性。
针对作业高度为24 m的伸缩式高空作业车稳定性状况进行分析,首先通过三维建模软件建立模型,按照国家标准对高空作业车的稳定性试验规定,分别对平面、斜面以及运动过程中进行稳定性分析,根据质心法分析质心和力矩法判断出其在水平状态及斜面情况下稳定性良好。
通过建立虚拟样机在动力学仿真中分析其支反力情况,对于出现支反力为0的情况,综合分析后对上装部分的车臂厚度进行响应面优化分析,后续通过试验验证了模型的可靠性。
优化设计提高了整车的稳定性,同时使得整车质量减少了79.73 kg,节约了材料。
关键词:伸缩式高空作业车;稳定性;响应面;轻量化中图分类号:TH113.2 文献标识码:B 文章编号:1001-0785(2023)12-0064-08Abstract: The stability of aerial platform is an important index of safety evaluation, which directly affects the overall performance of aerial platform and the safety of operation. For the stability analysis of the telescopic aerial platform with the working height of 24 m, firstly, a three-dimensional model was constructed, and the stability analysis of the plane, the inclined plane and the movement process were carried out respectively according to the stability test regulations of the aerial platform in the national standard. The center of mass was analyzed by the centroid method, and the stability was proved to be good in the horizontal state and the inclined plane by the moment method. The virtual prototype was established, and its supporting reaction was analyzed by dynamic simulation. When the supporting reaction was 0, the thickness of the upper arm was optimized by response surface analysis after comprehensive analysis, and then the reliability of the model was verified through tests. The optimized design can improve the stability of the whole platform, reduce its weight by 79.73 kg and save materials.Keywords:telescopic aerial platform; stability; response surface; lightweight0 引言伸缩式高空作业车具有较为广泛的应用前景,其稳定性是目前作为安全评价的一个重要指标,直接影响到高空作业车的整体性能以及作业的安全性。
伸缩机构典型设计问题分析(徐州海伦哲专用车辆股份有限公司江苏徐州221004)通过理论结合试验分析目前伸缩机构几个典型设计问题并提出相关改进建议。
关键词:伸缩机构一、典型伸缩机构组成伸缩机构在臂架式专用作业车工作的重要组成部分,它是臂架运动的执行机构。
它经典方案是液压驱动伸缩机构,其基木组成为驱动油缸、拉伸绳、回缩绳、链轮、臂架上的固定结构和附属元器件。
工作原理都基木类似:通过动力油缸驱动中间臂架(简称去驱动臂),将伸链轮布置在驱动臂头,缩链轮布置在驱动臂尾,在伸链轮和缩链轮的作用下,通过拉绳和缩绳进行运动传递,使三节臂能与驱动臂同步伸缩。
图1伸缩机构组成二、现有结构形式存在的问题目前市场上产品伸缩系统的拉绳和缩绳主要有两种方式:一种板式链传动,一种钢丝绳传动。
两种系统的经典布置方案都如图1所示。
无论是板式链传动还是钢丝绳传动,在使用过程中都存在以下几个典型问题:1、伸缩系统到底布置在臂架的上方还是下发随意性较大,没有定性数据显示哪种方案更有利于臂架的运动;2、不同规格型号的传动链拧紧力矩到底控制在多少最有利于臂架运动;3、到底该选用钢丝绳系统还是板式链系统没有定性依据。
三、存在问题分析及解决方案1、伸缩系统布置在臂架上的位置分析。
以典型三节臂系统的伸缩机构为例进行伸缩系统受力分析(以伸出为例,冋缩系统类似):T=G*SIN(a)+fT为三节臂伸出吋所需的最小拉力,G为三节臂承受的载荷及自重,f 是系统产生的摩擦力。
伸出链始终受拉力,故伸出系统对三臂、一臂始终有T的拉力,对二臂有2T的压力。
臂伸出后在负载和自重的作用下,有向下变形的趋势,如果忽略臂架剪应力的影响只考虑臂架为横向弯曲,此时臂架的上槽钢受拉力,下槽钢受压力。
又根据伸缩系统受力分析,臂架的伸缩系统始终为一、三臂架提供拉力,为二臂提供压力,如果将伸缩系统固定端布置在臂架的上槽钢,链轮布置在臂的下槽钢,此时伸缩系统加载到臂架上的内力与臂架在外载荷作用下受力方向相同,加剧了臂架的受力变形,如果将伸出系统固定端布置在臂架的上槽钢,链轮布置在臂架的下槽钢则会减缓臂架的变形。
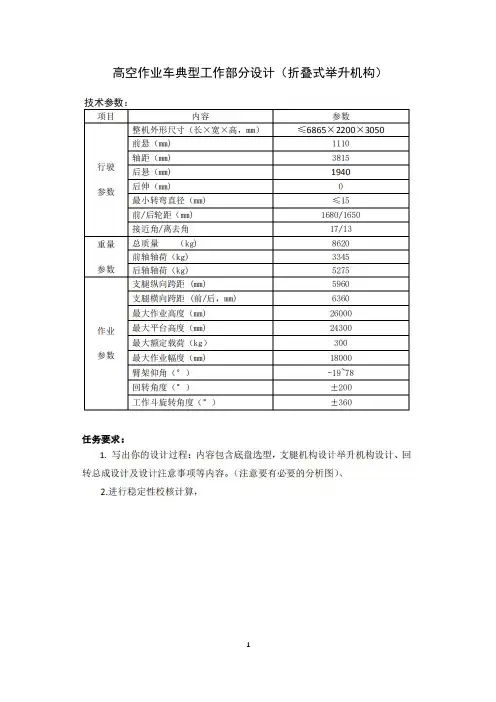
高空作业车典型工作部分设计(折叠式举升机构)一.底盘选择根据我国目前生产的各类型专用车辆的基本模式,大多是为了满足国民经济某一服务领域的特定使用要求,主要是在已定型的基本车型底盘的基础上,进行车身及工作装置的设计,与此同时对底盘各总成的结构与性能进行局部的更改设计与合理匹配,以达到满足使用需求的较为理想的整车性能。
 因此,专用汽车性能的好坏直接取决于专用汽车底盘的好坏,通常专用车辆所采用的基本底盘按结构分可分为二、三、四类底盘。
二类底盘是在整车基础上去掉货厢,三类底盘是从整车上去掉驾驶室与货厢,四类底盘是在三类底盘的上去掉车架总成剩下的散件。
 汽车底盘的选择主要是根据专用汽车的类型、用途、装载质量、使用条件、专用汽车的性能指标、专用设备或装置的外形、尺寸、动力匹配等决定,目前,几乎80%以上的专用车辆采用二类底盘进行改装设计。
采用二类汽车底盘进行改装设计工作重点是整车总体布置和工作装置设计,对底盘仅作性能适应性分析和必要的强度校核,以确保改装后的整车性能基本与原车接近。
在汽车底盘选型方面,一般应满足下述要求(1)适用性对于专用改装车底盘应适用于专用汽车特殊功能的要求,并以此为主要目标进行改装造型设计。
(2)可靠性:所选用汽车底盘要求工作可靠,出现故障的几率少,零部件要有足够的强度和寿命。
且同一车型各总成零部件的寿命应趋于平衡。
(3)先进性应使用整车在动力性、经济性、操纵稳定性、行驶平顺性及通过性等基本性能指标和功能方面达到同类车型的先进水平的汽车底盘。
而且在专用性能上要满足国家或行业标准的要求。
(4)方便性所选用的底盘要求便于安装、检查保养和维修,处理好结构紧凑与装配调试空间合理的矛盾。
选择江铃JX1083TK26底盘,参数如下二.支腿机构设计计算高空作业车的支腿机构起调平和保证整车工作稳定的作用,要求坚固可靠,操作方便。
1.支腿跨距的确定高空作业车的支腿一般为前后设置,并向两侧伸出,如图所示。
折叠臂式高空作业车设计一、设计背景随着城市建设的不断发展,高层建筑和大型设备的维护和维修变得越来越重要。
高空作业车作为一种实用的高空作业设备,被广泛应用于建筑、电力、石油等行业。
然而,传统的高空作业车在使用过程中存在一些问题,例如结构复杂、使用不便、操作受限等。
因此,设计一种折叠臂式高空作业车以解决这些问题具有很大的意义。
二、设计目标1.实现高空作业车的折叠设计,便于存储和运输。
2.简化高空作业车的结构,降低制造成本。
3.提高高空作业车的操作性能,以提高工作效率。
4.增加高空作业车的稳定性和安全性,减少事故发生的风险。
三、设计方案1.折叠设计:将高空作业车分为上部和下部两个部分,通过液压或电动机构实现折叠和展开。
在折叠状态下,可以将车辆体积减小到一个合适的尺寸,便于存储和运输。
2.简化结构:通过优化设计,减少部件数量和材料使用量,降低制造成本。
同时,采用轻量化材料如铝合金,提高载重能力和作业高度。
3.操作性能优化:增加电动转向机构,提高转向的灵活性和平稳性。
增加液压伸缩机构,实现折叠臂的伸缩,以适应不同的作业环境。
4.安全性设计:增加重心平衡系统,通过液压或电子控制保持车辆的稳定性。
增加封闭式驾驶室设计,提供更好的保护。
增加安全警示系统,提示操作员周围的危险情况。
四、技术实现1.折叠设计:采用液压或电动机构,控制折叠臂的展开和折叠。
通过设计合理的接合部位和锁扣机构,实现折叠时的安全和稳定。
2.结构简化:通过三维建模和有限元分析,优化设计结构和减少材料的使用。
采用铝合金材料,提高载重能力和作业高度。
采用模块化设计,方便维护和更换零部件。
3.操作性能优化:增加电动转向机构,通过电子控制实现转向的精确和平稳。
增加液压伸缩机构,通过液压泵和伸缩缸实现伸缩臂的伸缩。
4.安全性设计:增加重心平衡系统,通过液压或电子控制保持车辆的稳定性。
增加封闭式驾驶室设计,提供更好的保护。
增加安全警示系统,通过摄像头和传感器实时监测车辆周围的危险情况,并发送警报信号。
高空作业车结构强度分析与优化设计高空作业车是一种用于建筑施工、设备维护以及其他特殊场景下的作业车辆。
其重要性在于能够提供安全稳定的工作环境,确保作业人员的安全。
本文将对高空作业车的结构强度进行分析,并提出相应的优化设计方案。
首先,我们需要了解高空作业车的基本结构。
一般而言,高空作业车包括底盘、云梯系统、工作平台和电气控制系统等组成部分。
底盘是整个车辆的基础,承载着全部重量。
云梯系统是用于控制车辆的升降和伸缩功能,它包括升降臂、曲臂和伸缩臂等部件。
工作平台是作业人员进行工作的区域,必须具备足够的强度和稳定性。
接下来,我们将对高空作业车的结构强度进行分析。
首先是底盘的结构强度。
底盘承载着整个车辆的重量,必须能够承受各种工作条件下的冲击力和扭矩。
在设计时,需要考虑底盘的材料选择和梁柱结构的合理设计,以确保其强度和刚度。
其次是云梯系统的结构强度。
云梯系统是高空作业车升降和伸缩功能的核心,其结构必须能够承受高强度的拉力和压力。
在设计时,需要采用足够强度和刚度的材料,并进行适当的结构设计,以确保云梯系统的安全可靠性。
最后是工作平台的结构强度。
工作平台是作业人员进行工作的区域,必须具备足够的强度和稳定性,以防止发生翻倒或折断等意外情况。
在设计时,需要考虑工作平台的材料选择、梁柱结构的设计和支撑点的布置等因素,以提高其结构强度。
针对以上结构强度分析,我们可以提出相应的优化设计方案。
首先,选择高强度和刚度的材料,如高强度钢材,以提高整个车辆的结构强度。
其次,采用合理的结构设计,如增加梁柱的数量和加固关键连接点,以增加各个部件的强度和稳定性。
此外,使用适当的支撑点布置,可以有效分散工作平台的载荷,减少局部应力集中的发生。
除了结构强度的优化设计,我们还需考虑高空作业车的使用安全。
例如,安装相应的安全保护装置,如防抱死制动系统和倾斜传感器等,以提高车辆在坡度和不平路面的稳定性。
此外,定期进行维护和检查,以确保车辆各个部件的可靠性和功能完整性。
高空作业车研究报告高空作业车是一种用于进行高空作业的车辆,其主要用途包括维修、清洁、搬运和建筑等领域。
作为一种高空作业设备,高空作业车具有一些特殊的性能和设计要求。
本报告将对高空作业车进行研究,并介绍其性能、设计要求以及应用领域等内容。
一、高空作业车的性能特点1.高度:高空作业车能够达到较高的高度,可以进行垂直、水平等多方位作业。
2.承重能力:高空作业车能够承载较大的负荷,在作业中大大提高了效率。
3.稳定性:高空作业车的稳定性要求较高,可以保证操作人员的安全。
4.灵活性:高空作业车可以灵活移动,适应复杂的作业环境。
二、高空作业车的设计要求1.安全性要求:高空作业车应该满足相关的安全标准,包括结构强度、稳定性、作业环境等方面的要求。
2.操作人员的舒适性:高空作业车要能够为操作人员提供较好的工作环境,包括舒适的工作空间、舒适的座椅及照明设施等方面的要求。
3.灵活性:高空作业车应该具有较高的灵活性,可以适应不同的作业环境和工作需要。
4.维护性:高空作业车应该具有较好的维护性,包括易于维修和保养等方面的要求。
三、高空作业车的应用领域高空作业车主要用于以下领域:1.维修和清洁:高空作业车可以用于高层建筑、桥梁、机场等大型设施的维修和清洁,如玻璃幕墙的清洗、照明设备的更换等。
2.建筑:高空作业车可以用于建筑施工,如高层建筑的梁柱砌筑、钢架结构的搭建等。
3.物流:高空作业车可以用于物流领域,如仓库货架的搬运、货车装卸等。
四、结论高空作业车是一种非常重要的高空作业设备,它具有承载能力强、灵活性高等优点,在维修、建筑、物流等领域有着广泛的应用。
在设计过程中,应该充分考虑安全性、舒适性、灵活性和维护性等要求,提高高空作业车的性能和效率。
摘要本设计主要以小型折臂式高空作业车上、下臂结构为研究对象,对上、下臂进行结构和该车上`的设计。
主要分两部分进行阐述,第一部分:根据高空作业车的最大高度10米,在满足作业高度的前提下,进行高空作业臂的结构设计:首先根据作业载荷使用要求选择作业臂材料类型;其次根据最大作业高度确定上、下长度;在经过受力分析利用强度来确定臂的截面尺寸,进而校核强度、刚度、稳定性,查看作业臂的尺寸是否符合要求。
对施加均布载荷和约束,进行结构的强度和刚度的分析,确定危险截面或危险点的应力分布及变形,最后画出作业臂的总装图。
第二部分:液压控制部分主要是指控制上下臂变幅运动的液压缸。
文中详细记录了高空作业机构上下臂液压缸的设计过程,在确定液压系统元件参数的基础上,完成了液压传动系统的设计计算。
关键词:折叠臂式高空作业车,折叠臂式液压系统设计,专用汽车,设计IABSTRACTIn this paper , to” high-altitude vehicles”,under the arm to study de structure of the upper and the lower arm to the vehicles structure and the design of the hydraulic system,mainly conducted in two parts on,high-aititude vehicles under one of the largest 10 meters high degree of operating,to meet the high degree of operating under the premise of a high-aititude operations arm of the structural design ,first,the use of operating arm asked to choose the type of material and secondly in accordance with the largest Operating highly determined ,under the arm length ;another use of force analysis to determine the strength of the arm section size and location of the fuel tank of the hinged ;further strength ,stiffness,the stability of checking to see whether the size of the operating arm to meet the requirements .to impose uniform loading and constraints ,structural strength and stiffness analysis, risk and danger point cross-section of the stress and deformation ,finally draw operating arm and hand ,arm parts under the plans .and hydraulic control of the mainly refers to control the movement from the top to bottom arm change hydraulic cyclinders .In a detailed record of the agencies operating at high altitude upper arm hydraulic cylinders and hydraulic cylinders under the arm of the design of process .In the determining the parameters of the hydraulic system components ,based on the completion of the hydraulic system desion and calculation.Key words: Folded-arm high-altitude vehicles Folding arm type hydraulic system design Special Vehicle DesignII目录摘要 (I)ABSTRACT (II)第1章绪论 (6)1.1课题的背景 (6)1.2小型折叠臂式高空作业车的发展概况 (7)1.3国内外折叠臂式高空作业车的发展概况 (7)1.4论文研究基本内容 (8)第2章折叠臂式高空作业车作业臂设计 (9)2.1高空作业臂选择 (9)2.1.1高空作业臂分析 (9)2.1.2作业臂作业状态主要技术参数 (9)2.1.3 作业臂材料选择 (10)2.2上下臂的计算与校核 (10)2.2.1计算上下臂的长度 (10)2.2.2 上臂截面尺寸的确定 (11)2.2.3 对上臂进行强度校核 (13)第3章折叠臂式高空作业车总体方案分析 (15)3.1动力传动装置设计与分析 (15)3.1.1设计要求 (15)3.1.2动力传动装置的选择 (15)3.2工作装置设计与分析 (16)3.2.1支腿机构 (16)3.2.2回转机构 (21)3.2.3操作及安全防护装置 (22)第4章回转机构设计计算 (24)4.1回转机构设计 (24)4.1.1确定圆柱滚子的最大载荷 (24)4.1.2确定圆柱滚子的允许载荷 (26)第5章液压系统设计计算 (27)5.1 确定液压缸类型和安装方式 (27)5.2 确定液压缸的主要性能参数和主要尺寸 (27)5.2.1液压缸内径D的计算 (27)5.2.2活塞杆直径d的计算 (29)5.2.3缸壁厚的计算 (29)5.2.4 缸体外径计算 (30)5.3液压泵的选型计算 (30)III5.3.1、液压泵理论流量Q r (30)5.3.2、油泵排量q (31)5.3.3 油箱容积计算 (31)5.3.4油管内径计算 (31)致谢 (33)参考文献 (34)附录1 中文翻译 .................................................................... 错误!未定义书签。
高空作业车臂架结构优化设计研究伸缩臂是汽车工作装置的主要组成部分,它直接影响到汽车的作业性能。
以臂架重量的最小化作为调整的最优目标,以强度和刚度等相关条件作为约束条件,创建出调整后的数学模型,从而得出最理想的截面类型。
研究调查显示,经调整后的臂架最大应力、以及质量等参数均有所降低,在增强臂架综合性能指标的水平之上,完成了减轻自重的初步目标,期望能对作业车的臂架内部结构的设计工作带来些许参考价值。
标签:高空作业;结构优化;臂架臂架的综合性能将极大地影响到汽车的作业效率。
伸缩臂的质量在整个作业车的质量中占有很大的比例。
若目前吊臂存在重量过大的现象,则会进一步地影响工作效率的问题。
所以,在保证工作强度以及工作刚度的基础之下,要不断地对臂架结构进行调整与优化,用以提高臂架的自身性能。
并创建臂架的具体化数学模型,通过部分软件实现对臂架截面的尺寸等参数进行调整与优化。
一、高空作业车臂架结构截面形式对高空作业车臂架结构的截面形式的优化与调整是截面优化的关键步骤,其可以在增强高空作业车臂架结构的综合能力的基础之上,进一步地减小其臂架自身的质量,最大程度上地节省所用原材料,降低作业成本。
高空作业车臂架结构的基本参数如图1所示,由图可得,高空作业车的臂架横截面的主要形式为矩形,其中,m、n分别为上、下盖板的厚度大小,L为作业车臂架的上下盖板宽度的大小,t为盖板的厚度大小,H则为盖板的高度大小,此五类信息为高空作业车臂架结构的主要参数。
二、高空作业车臂架结构的有限元类分析优化前,必须对臂架进行有限元分析。
在DM模块中创建了臂架结构的具体化数学模型[1]。
起重机的最大的工作载荷施加在臂座的上端面之中。
其方向是Y轴的负方向。
在臂架侧面施加120帕的风荷载,在臂架上施加等效重量的筒体、管道等部件。
u,ur的平移自由度。
U2和旋转的两个方向。
转子被约束在气缸和基本臂的铰链连接处,并释放其绕Z轴的转动方向的自由度。
并且在其他关节处增添相同的约束条件,通过静力分析得到相对应的应力云图以及应变云图。
高空作业车臂架同步伸缩装置设计【摘要】为增大高空作业车的作业范围,高空作业车的工作臂架常采用伸缩式结构的多节臂。
本文针对现役使用中存在问题,设计一套臂架同步伸缩装置,解决目前已有技术中的不足之处,提供一种结构简单,刚度大,同步伸缩性好,可靠性高的伸缩装置,尤其是一种适用于汽车起重机、高空作业车等工程机械的伸缩臂架同步伸缩装置。
【关键词】同步伸缩装置;伸缩臂架为增大作业范围和作业安全稳定性,工程机械的工作臂架和支腿常采用伸缩式结构的多节臂(支腿)。
现在的伸缩技术和装置主要存在如下不足:(1)每个伸缩臂都由一个油缸驱动,使得结构复杂,难以同步伸缩,效率低;(2)采用油缸加钢丝绳排的结构,会造成伸缩臂间的截面相差大,伸缩结构复杂,臂架重量大、刚度小;(3)采用双套筒伸缩油缸控制的三节支腿伸缩装置,只能顺序伸缩,并且双套筒伸缩油缸的结构复杂,使用可靠性低。
为此作者设计了一套高空作业车臂架同步伸缩装置。
1.装置结构本文的一种同步伸缩装置,包括臂架总成、油缸总成、钢丝绳导向装置和绳排等。
所述的臂架总成包括固定臂(3)、第一伸缩臂(6)和第二伸缩臂(7),各臂的截面均为根据需要而加工成相同的多边形,其中第二伸缩臂(7)滑套在第一伸缩臂(6)之中,第一伸缩臂(6)滑套在固定臂(3)之中,在固定臂(3)的右端内部固定有2个尼龙滑块(10),在第一伸缩臂(6)的左端外部固定有4个尼龙滑块(4),在第一伸缩臂(6)的右端内部固定有2个尼龙滑块(11),在第二伸缩臂(7)的左端外部固定有2个尼龙滑块(5)。
油缸总成包括油缸(9)、固定支座(18)、支座板(2)、支承板(14)和支承轮(13)等,油缸(9)为双作用液压缸,其缸筒的左端通过两根短轴与第一伸缩臂(6)的侧板铰接相连,缸筒的右端中部固定有支承板(14),活塞杆端部固定有固定支座(18),支座板(2)为折弯钢板,其左端固定在固定支座(18)上,支承轮(13)滑装在固定在支承板(14)下部的轮轴上。
基于响应面法的高空作业车伸缩臂轻量化分析曹国智1 熊新红1 朱春东1,2 周联谱11武汉理工大学 武汉 430070 2随州武汉理工大学工业研究院 随州 441300摘 要:文中针对目前高空作业车伸缩臂壁厚设计不合理而导致伸缩臂整体质量偏大、作业时笨重缓慢的现状,对某型高空作业车伸缩臂进行轻量化分析。
对高空作业车上装结构进行模型进化得到伸缩臂的三维模型,分析确定了伸缩臂的最危险工况为30°,计算得到了轻量化设计需满足的强度及刚度条件。
在此工况下,以伸缩臂各节臂壁厚参数为设计变量,以伸缩臂总质量为优化目标,利用Workbench 对不同壁厚参数下伸缩臂模型有限元分析得到的应力及变形数据进行非线性拟合,再利用响应面优化得到最佳的壁厚参数组合。
在满足设计要求的前提下,优化后的伸缩臂总质量较优化前降低了227 kg,减重比例达到了36.3%。
关键词:高空作业车;伸缩臂;有限元分析;响应面优化;轻量化中图分类号:TH211.6 文献标识码:A 文章编号:1001-0785(2023)07-0039-06Abstract: Considering the unreasonable wall thickness design of the telescopic boom of hydraulic aerial cage at present, the overall weight of the telescopic boom is heavy and the operation is heavy and slow, the lightweight analysis of the telescopic boom of a certain hydraulic aerial cage is carried out. The model evolution of the truck-mounted structure of aerial work is carried out, and a three-dimensional model of the telescopic boom is obtained. After analysis, it is determined that the most dangerous working condition of the telescopic boom is 30, and the strength and stiffness conditions that the lightweight design needs to meet are obtained. Under this working condition, the wall thickness parameters of the telescopic boom are taken as design variables, and the total mass of the telescopic boom is taken as optimization objective. Using Workbench, the stress and deformation data obtained by finite element analysis of the telescopic boom model are nonlinear fitted with different wall thickness parameters, and then the optimal combination of wall thickness parameters is obtained by response surface optimization. Under the condition of meeting the design requirements, the total mass of the optimized telescopic boom is reduced by 227 kg and the weight is reduced to 36.3%.Keywords: hydraulic aerial cage; telescopic arm; finite element analysis; response surface optimization; light weight0 引言随着我国城市化进程的不断推进,高空作业车被广泛用于城市基建、公共设施维护以及消防救援等各类高空场景。
建筑伸缩装置施工方案设计一、建筑伸缩装置的设计1.1 设计原则在进行建筑伸缩装置设计时,需要遵循以下原则:(1)结构合理:伸缩装置的结构设计应该考虑到建筑物的整体结构,确保不影响建筑物的稳定性和安全性。
(2)操作方便:伸缩装置应该设计成方便操作的形式,可以通过电动或手动方式进行伸缩,操作简便。
(3)美观大方:伸缩装置的设计应该与建筑物整体风格相协调,增加建筑物的美感。
1.2 设计要求在设计建筑伸缩装置时,需要考虑以下要求:(1)承重能力:伸缩装置需要承受建筑物的重量,因此需要具有足够的承重能力。
(2)耐久性:伸缩装置需要经常进行伸缩操作,因此需要具有较好的耐久性,能够经受住长期使用的考验。
(3)防水防尘:伸缩装置需要考虑防水和防尘的问题,以确保设备长期使用。
1.3 设计流程建筑伸缩装置的设计流程主要包括以下步骤:(1)需求分析:首先要了解建筑物的需要,确定伸缩装置的类型和参数。
(2)方案设计:根据需求分析的结果,设计伸缩装置的方案,包括结构设计、操作方式等。
(3)模拟仿真:使用仿真软件对设计方案进行模拟仿真,验证设计的可行性。
(4)优化设计:根据模拟仿真结果对设计方案进行优化,增加设计的合理性和可靠性。
(5)施工图设计:根据优化的设计方案,完成伸缩装置的施工图设计,确定施工的具体细节。
1.4 设计工具在进行建筑伸缩装置设计时,可以使用以下设计工具:(1)CAD软件:CAD软件可以用来进行结构设计和绘图,方便设计师进行设计和修改。
(2)3D建模软件:3D建模软件可以用来进行伸缩装置的三维建模,帮助设计师更直观地了解设计效果。
(3)仿真软件:仿真软件可以用来进行伸缩装置的模拟仿真,验证设计的可行性和稳定性。
二、建筑伸缩装置的施工方案设计2.1 施工要求在进行建筑伸缩装置的施工时,需要遵循以下施工要求:(1)安全第一:施工过程中要注重安全,确保工人和设备的安全。
(2)质量第一:施工质量是施工的重要指标,要确保伸缩装置的质量达到要求。
基于伸缩式高空作业车设计探讨
(云南远鹏装饰设计工程有限公司)
摘要:文章主要阐述了伸缩式高空作业车主要机构的设计原理,并对整机稳定性进行了分析。
通过分析,该设备有普通高空作业设备的全部功能,具有回缩尺寸小,伸缩量、工作幅度大,操作灵活等特点,适用于作业空间狭小、尺寸要求严格的工作环境。
关键词:高空作业车;伸缩臂;摆臂;稳定性
前言:
近年来,随着建筑业的发展,各类起重机得到了广泛的应用。
在一些特殊工作条件下,为进行设备和物料的输送,特殊起重设备应运而生。
狭小空间内,如多层地下建筑,当需要从底层孔洞向顶层输送维修人员及物料时,要求升降机构全缩尺寸很小且全伸尺寸很大,工作机构的可达位置还要能够覆盖较大的作业空间,升降机构上往往附有回转工作平台,受力情况复杂,对设备的强度和结构刚性提出了更高要求。
一、伸缩式高空作业车设计方案
伸缩式高空作业车主要采用垂直升降形式,展开时工作幅度大,回缩时外形尺寸小,结构紧凑,整机分为升降机构、变幅机构、回转机构和行走机构,其整机模型如图1所示。
图1 整机模型
1.1升降机构
由于升降距离较大,为提高设备刚度,升降机构采用箱型伸缩臂。
伸缩机构由3节臂组成,伸缩臂采用箱形结构,采用液压油缸和钢丝绳滑轮系统进行伸缩。
图2为采用1个单级液压缸和1套钢丝绳滑轮系统的同步伸缩机构。
油缸伸缩杆与基本臂由销轴铰接,缸体与第二节臂由销轴铰接。
钢丝绳a绕过滑轮a,一端由销轴与第三节臂相连,另一端与基本臂相连。
钢丝绳b绕过滑轮b,一端与基本臂相连,另一端与第三节臂相连。
滑轮b装在第二节臂上。
滑轮a装在液压缸体头部。
当缸体带动第二节臂伸出时,滑轮a随缸体上升,通过钢丝绳a拉动第三节臂上升。
第三节臂的同步缩回,是由钢丝绳b完成的,其动作原理与同步伸出完全一样。
1-基本臂;2-油缸伸缩杆;3-油缸缸体;4-第二节臂;5-第三节臂;6-滑轮a;
7-钢丝绳a;8-钢丝绳b;9-滑轮b
图2 伸缩臂同步伸缩原理图
1.2变幅机构
图3为双油缸串联调平机构原理图。
在一次调平过程中油压和温度的变化对调平误差影响很小,其调平精度主要由其铰点位置的选取来决定,故对铰点位置的优化就显得尤为重要。
a点为升降机构中第三节臂和摆臂的铰接点,与第三节臂相连的油缸称为主动油缸,与工作平台相连的油缸称为被动油缸。
b点为主动油缸和第三节臂的铰接点,c点为主动油缸和摆臂的铰接点。
三角形中ab和ac边长度固定不变,通过作为bc边的主动油缸的伸缩来驱动摆臂
进行变幅运动。
摆臂与工作平台铰接点d,被动油缸和摆臂的铰接点e,被动油缸和工作平台的铰接点f,这三点构成另外一个三角形。
其中de和df两边长度固定不变,通过被动油缸的伸缩变化即可改变工作平台与地面间的夹角。
图3 双油缸串联调平机构原理图
摆臂向上变幅,主动油缸伸出时,由于主、被动油缸串联,故主动油缸伸出一定长度,则被动油缸缩回相同的长度。
c点绕a点运动到c′点,摆臂向上摆动的角度为∠cac′,同时f点绕d点运动到f′,工作平台向下摆动∠fdf′。
如果∠cac′与∠fdf′相等则就实现了工作平台的调平。
通过以上分析,双油缸串联调平机构可归结为两个三角形边长的问题。
1.3 回转机构
回转机构的作用是实现作业车的回转运动。
回转机构采用360°下回转,安装在行走小车上,操作和安装都非常方便。
回转台通过回转支承固定在车架上,由液压马达经减速器将动力传递到回转小齿轮上,小齿轮既作自转又作沿着固定在底架上的回转支承大齿圈公转,进而带动整个上车部分回转,从而扩大高空作业车作业范围。
1.4 行走机构
行走机构承受整机的重量及由传动系和操纵系传来的力和力矩,行走机构包括车架、支腿及车轮。
图4为行走机构模型。
图4 行走机构模型
二、伸缩式高空作业车稳定性分析
2.1倾翻稳定性计算
高空作业车运载人时,支腿伸出以撑实地面,此时同一侧的两支腿构成倾覆线,由于起运车质心对倾覆线的稳定力矩相应较小,当起重装置在整车侧方起吊载荷时,稳定性较差,且当吊臂在水平面投影垂直于小车前后轴线时,吊重力臂最长,此外,当吊臂仰角为0°时,力矩吊重力矩最大,高空作业车处于最不利工作状况。
故其稳定安全系数
式中ms——位于倾翻线内侧的稳定力矩;mt ——位于倾翻线外侧的倾翻力矩;e——伸缩臂与机架铰点距离和支腿几何中心的距离。
本设计中,a——支腿与地面作用点距支腿几何中心距离,300mm;gc——行走机构的重量,2130kg;gs——摆臂的重量,150kg;gh ——工作平台的重量,300kg;q——起重量,300kg。
由此可见,作业车在起重过程中是稳定的,不会发生倾翻。
2.2 伸缩臂稳定性计算
分析研究表明,结构稳定性失效具有突发性、结构变形大等特点,一旦发生稳定失效,结构随即崩溃。
箱形臂的稳定性设计是否合理,直接影响到起重机的质量及工作性能、起重性能、承载能力和整机的稳定性。
考虑轴向力二阶效应,解其单元平衡方程可得
其中
式中e——材料的弹性模量;
i——截面惯性矩;
p——轴力。
梁杆结构失稳条件为其刚度矩阵行列式值为零,即det(k)=0,由单元刚度矩阵组装成结构刚度阵后,即可根据刚度阵行列式为零的失稳条件得到失稳特征方程,由此解出临界力系数εcr及对应临界力pcr=εcr2/l2 。
等截面柱的精确刚度矩阵为
由临界失稳条件det(k)=0可求得pcr=π2ei/4l2。
对实际工况进行仿真,可得伸缩臂应力及位移仿真图(略)。
三、结论
综上所述,通过针对伸缩式高空作业车设计及稳定性分析,得到了以下几个方面的结论:
(1)设计了一种伸缩式高空作业车,这种高空作业车升降机构采用了伸缩形式,整体刚度大,全伸时工作高度很大,全缩时又很节省空间;摆臂机构采用液压式折叠机构,再加上360°全回转机构,扩大了工作范围,提高了劳动生产率。
(2)行走机构采用手推小车的形式,既节约了成本,又可使设备移动灵活。
(3)为避免稳定性失效,对整机稳定性进行了分析,并给出了仿真模型。
(4)该设备回缩尺寸小,伸缩量、工作幅度大,适用于环境空间狭小、作业空间较大的工作场合。
参考文献
[1]汤茂旭,刘木南.轮式起重机起重臂的发展历程[j].建筑机械化,2007(2).
[2]陈巍巍.高空作业车折叠伸缩混合式工作臂稳定性分析[j].机械设计与制造,2009(09).。