2000年哈尔滨工程大学自动控制原理考研真题【圣才出品】
- 格式:pdf
- 大小:370.29 KB
- 文档页数:3
考查要点:一、控制系统的数学模型1、控制系统运动的建立;2、控制系统的传递函数的概念及求取、方框图及其简化、信号流图及梅森公式。
二、线性系统的时域分析1、一阶、二阶系统的时域分析;2、线性系统的稳定性基本概念及熟练掌握劳斯 (Routh)稳定判据判别稳定性的方法;3、控制系统稳态误差分析及其计算方法;4、复合控制。
三、根轨迹法1、根轨迹、根轨迹方程及其绘制根轨迹的基本规则;2、理解控制系统根轨迹分析方法。
四、频率响应法1、线性系统频率响应物理意义及其描述方法;2、典型环节的频率响应(幅相曲线与对数频率特性曲线);3、开环系统及闭环系统的频率响应的绘制;4、奈奎斯特(Nyquist)稳定判据和控制系统相对稳定性;5、频域指标与时域指标的关系。
五、控制系统的校正与综合1、频率响应法串联校正分析法设计;2、基于频率响应法的串联、反馈校正的综合法设计。
六、非线性控制系统的分析1、了解典型非线性特性的输入输出关系(数学表达及关系曲线);2、理解非线性环节对线性系统的影响;3、相平面法、描述函数法分析非线性控制系统。
七、数字控制系统的普通概念1、采样过程、采样定理、零阶保持器的基本概念。
八、数字控制系统1、Z 变换的基本概念、基本定理及 Z 反变换;2、数字控制系统的数学描述;3、数字控制系统稳定性分析;4、数字控制系统的暂态、稳态、误差分析。
5、数字控制系统的离散化设计方法及至少拍离散系统设计。
九、线性系统的状态空间描述1、线性时不变系统状态空间描述;2、线性定常系统的运动分析、状态转移阵、脉冲响应阵;3、线性离散系统的状态空间描述;4、线性系统的能控性和能观性判别方法。
十、线性定常系统的线性变换1、状态空间表达式的线性变换;2、对偶性原理;3、线性系统的结构分解。
十一、李雅普诺夫稳定性分析1、李亚普诺夫意义下运动稳定性的基本概念;2、李亚普诺夫第二法主要定理;3、系统运动稳定性判据。
十二、线性反馈系统的时间域综合1、状态反馈和输出反馈;2、极点配置的设计方法;3、状态观测器的设计;4、状态观测器和状态反馈组合系统。
目 录
2013年哈尔滨工业大学801控制原理考研真题
2012年哈尔滨工业大学801控制原理考研真题
2011年哈尔滨工业大学801控制原理考研真题
2010年哈尔滨工业大学801控制原理考研真题
2009年哈尔滨工业大学801控制原理考研真题
2008年哈尔滨工业大学801控制原理考研真题及详解
2007年哈尔滨工业大学401控制原理考研真题及详解
2006年哈尔滨工业大学401控制原理考研真题
2004年哈尔滨工业大学控制原理考研真题
2000年哈尔滨工业大学控制原理考研真题
2013年哈尔滨工业大学801控制原理考研真题。
哈工程自动控制原理810资料清单
初试:
1, 1999-2013、2015自动控制原理真题。
2,1999-2013自动控制原理真题答案。
3,《自动控制原理》期末试题及答案。
4,工程内部题库、学习笔记。
5,哈工程老师的课件。
包括:王晓陵老师哈工程的《自动控制原理》教案讲义、陈明杰老师哈工程的《自动控制原理》教学课件、苏丽老师哈工程的《自动控制原理》教学课件(现控部分)、陈明杰老师自控课件、王晓陵老师自动控制原理课件以及别的一些课件。
6,2013-2014自控考前答疑及最后一届辅导班笔记,之后不再有答疑。
7,《自动控制原理》的视频教程:1胡寿松版本《自动控制原理》课程精讲2西工大卢京潮自控视频,3石群40讲(石群全部视频的一半)。
根据各人情况选择,强烈建议前两个。
8,网学天地哈工程考研所有电子版:现代控制理论、自控讲义、经典题详解、专项辅导。
9 ,哈工程相关介绍:16年录取分析、哈工程联系方式汇总、实验室介绍、导师信息,资料使用及复习指导。
10,录取相关信息及大纲。
11,其他一些电子版。
复试
1,微机原理及自控元件复试真题
2,综合面试题库(包含05年面试题)
3,自控元件期末题及题库
4,微机原理期末试题
5,其他一些资料。
需要的可以联系QQ1523938925。

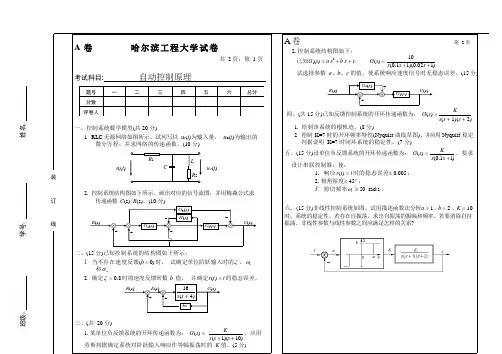
G2(s)1A 卷哈尔滨工程大学试卷A 卷第2 页2. 控制系统结构图如下:共 2 页;第 1 页已知G (s) =a s2 +b s +c G(s) = 10s(0.1s +1)(0.02s +1) 考试科目: 自动控制原理试选择参数a、b、c 的值,使系统响应速度信号时无稳态误差。
(15 分)R(s) + C(s)一、控制系统数学模型(共20 分)-四、(共15 分)已知反馈控制系统的开环传递函数为:G(s) =1.绘制该系统的根轨迹。
(8 分)Ks(s + 1)(s + 2)1.RLC 无源网络如图所示。
试列写以u i(t)为输入量,u o(t)为输出的微分方程。
并求网络的传递函数。
(10 分)2.绘制K=7 时的开环频率特性(Nyquist 曲线草图),并应用Nyquist 稳定判据说明K=7 时闭环系统的稳定性。
(7 分)R1u i(t) CLu o(t)R2五、(15 分)设单位负反馈系统的开环传递函数为:G(s) =设计串联控制器,使:1.响应r(t) =t 时的稳态误差≤ 0.005 ;2. 相角裕度≥ 45︒;Ks(0.1s +1),要求2.控制系统结构图如下所示。
画出对应的信号流图,并用梅森公式求传递函数C(s)/R(s)。
(10 分)3.剪切频率ωc≥ 50 rad/s 。
R(s)- -G3(s)- H(s)--C(s)六、(15 分)非线性控制系统如图。
试用描述函数法分析a = 1、b = 2 、K = 10时,系统的稳定性。
若存在自振荡,求出自振荡的振幅和频率。
若要消除自持振荡,非线性参数与线性参数之间应满足怎样的关系?二、(15 分)已知控制系统的结构图如下所示:1.当不存在速度反馈(b = 0) 时,试确定单位阶跃输入时的ζ、ωn和σp2.确定ζ= 0.8 时的速度反馈常数b 值,并确定r(t) =t 的稳态误差。
R(s) E(s)- -C(s)三、(共20 分)1. 某单位负反馈系统的开环传递函数为:G(s) =Ks(s +1)(s +10),应用劳斯判据确定系统对阶跃输入响应作等幅振荡时的K 值。
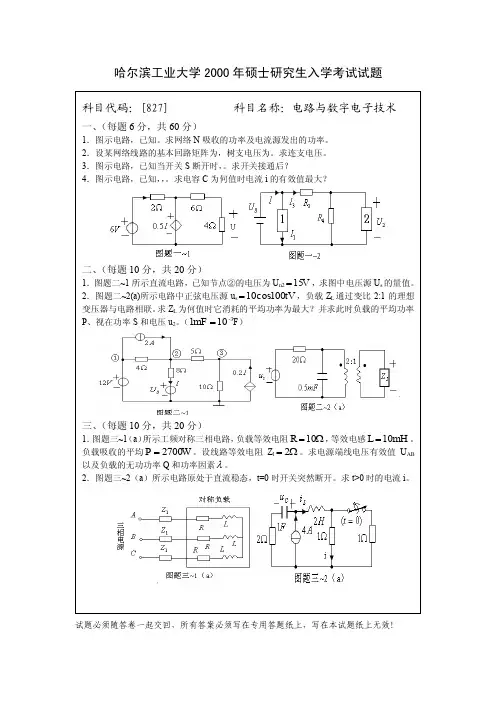
哈工大2000-2001年操作系统考研试题(复试专用)哈尔滨工业大学2000年操作系统考研试题考试科目:操作系统一.简答题:(共30分)1.什么是操作系统?它有什么基本特征?(6分)2.试比较进程和程序的区别。
(6分)3.在用户和操作系统之间存在哪几种类型的接口?它们的主要功能是什么?(6分)4.解释下列概念:(12分)进程、线程、同步机构、临界区、文件、设备驱动程序二.举例说明在分页系统下的地址转换过程(8分)三.什么是死锁?产生的原因是什么?如何解除死锁?(8分)四.什么是DAM方式?它与中断方式的主要区别是什么?(8分)五.在一个请求页式存储管理系统中,进程P共有5页,访问串为:3,2,1,0,3,2,4,3,2,1,0,4时,试采用LRU置换算法和LFU置换算法,计算当分配给该进程的页面数分别为3和4时,访问过程中发生的缺页次数和缺页率,比较所得的结果,浅释原因。
(15分)六.在一个分时操作系统中,用户提交了一个作业,作业的内容包括:(1)请求内存(memory);(2)计算并将结果存于内存memory ;(3)请求打印机printer;(4)将memory中的内容在打印机上输出;(5)释放printer;(6)释放memory;(7)结束。
试从分时操作系统对资源管理的观点论述该作业从提交开始到结束为止,操作系统为其提供服务与控制的全部过程。
(15分)七.汽车司机与售票员之间必须协同工作,一方面,只有售票员把车门关好了司机才能开车,因此,售票员关好车门应通知司机开车。
另一方面,只有当司机已经停下,售票员才能开门上下客,故司机停车后应通知售票员。
假定某辆公共汽车上有两名售票员与一名司机,汽车当前正在始发站停车上客,试设必要的信号灯及赋初值,写出他们的同步过程。
(用管程或信号灯均可)(16分)哈尔滨工业大学2001年操作系统考研试题考试科目:操作系统一.判断改错题(10分)(判断下列叙述是否正确,认为正确在括号内打“√”;若不正确打“╳”,并改正。
2000年哈尔滨工程大学自动控制原理考研真题
R(s)
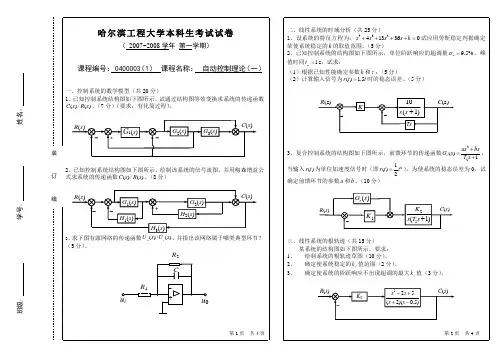
一、(15')化简方块图,求图示系统传递函数C(s)/R(s),C(s)/F(s)。
二、(15')设系统如图所示,已知系统对单位阶跃响应的超调量σ%=16.3%,峰值时间tp=1s,试求(1)根据已知性能指标σ%及tp确定系统参数k及τ的值。
(2)当输入信号r(t)=1.5(恒速信号)时,求系统的稳态误差。
三、(15')已知负反馈控制系统的开环传递函数为:GH(s)=, 试绘制k=0→+∞变化时的根轨迹图,并求保证系统稳定时的k 值的范围。
四、(15')已知控制系统如图所示。
试用频率响应法确定闭环系统临界
稳定时的τ值。
注意:第五、六题任选一题即可!
五、(10')设非线性系统如图所示.
系统初始条件C(0),(0)给定,
试大致画出系统的典型相轨迹。
六、(10')设离散控制系统如图所示
k (1-0.5s )
s (s +3)C C(s)
已知G(Z)=
试求保证系统稳定的K 值的范围。
七、
(15')给定线性定常系统如图所示。
(1)按图中所选定的状态变量,写出系统的状态实现。
(2)能否通过选择k ,a 使系统丧失能控性;或丧失能观性;或同时丧失能控性与能观性。
八、(15')给定系统传递函数G(s)=
能否通过状态反馈将闭环传递函数变为:
G k (s) =
若可能,如何进行变换(确定出反馈增益距阵)。
1.8KZ
(Z -1)(Z -0.82)(s -1)(s +2)
(s +1)(s -2)(s +3)s -1
(s +2)(s +3)。