哈工程自控考研大纲
- 格式:doc
- 大小:29.00 KB
- 文档页数:2
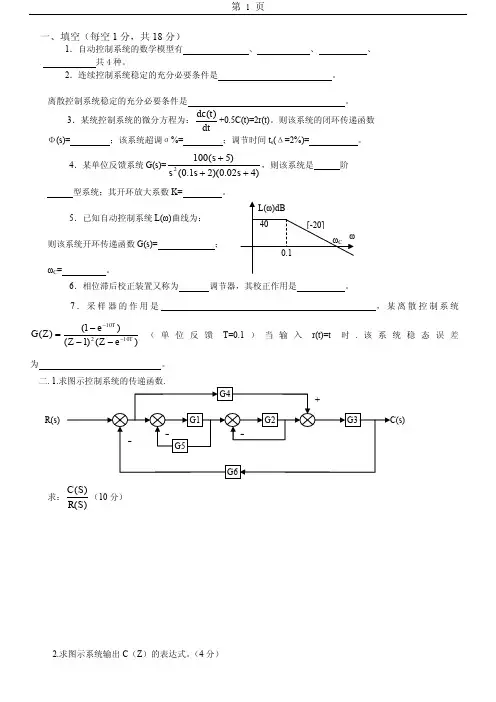
自动控制原理辅导班讲义一、 自动控制理论的分析方法:(1)时域分析法;(2)频率法;(3)根轨迹法;(4)状态空间方法;(5)离散系统分析方法; (6)非线性分析方法 二、系统的数学模型(1)解析表达:微分方程;传递函数;脉冲传递函数;频率特性;脉冲响应函数;阶跃响应函数 (2)图形表达:动态方框图(结构图);信号流图;零极点分布;频率响应曲线;单位阶跃响应曲线时域响应分析一、对系统的三点要求:(1)必须稳定,且有相位裕量γ和增益裕量g K(2)动态品质指标好。
p t 、s t 、r t 、σ% (3)稳态误差小,精度高 二、结构图简化——梅逊公式 例1、解:方法一:利用结构图分析:()()()()[]()()[]()s X s Y s R s Y s X s R s E 11--=+-=方法二:利用梅逊公式 ∆∆=∑=nk KK P s G 1)(其中特征式 (11),,1,1+-+-=∆∑∑∑===Qf e d f e dMk j kjNi i L L LLL L式中: ∑i L 为所有单独回路增益之和∑jiLL 为所有两个互不接触的单独回路增益乘积之和∑fedLL L 为所有三个互不接触的单独回路增益乘积之和其中,k P 为第K 条前向通路之总增益;k ∆ 为从Δ中剔除与第K 条前向通路有接触的项; n 为从输入节点到输出节点的前向通路数目 对应此例,则有:通路:211G G P ⋅= ,11=∆特征式:312131211)(1G G G G G G G G ++=---=∆则:3121111)()(G G G G P s R s Y ++∆=例2:[2002年备考题]解:方法一:结构图化简继续化简:结果为其中)(s G =…方法二:用梅逊公式[]012342321123+----=∆H G G H G G G H G G通路:1,1321651=∆=G G G G G P1232521,H G GG P +=∆= 1,334653=∆=G G G G P于是:()()......332211=∆∆+∆+∆=P P P s R s Y(1)参考输入引起的误差传递函数:()HG Gs R s E 2111)(+=; 扰动引起的误差传递函数:()()HG G H G s N s E 2121+-=(2)求参考输入引起的稳态误差ssr e 时。
哈工大控制考研大纲
哈尔滨工业大学控制考研大纲包括以下几个部分:
1. 考试要求:要求考生全面掌握控制原理的基本概念和基础理论,并具有运用基本概念和基础理论分析问题与解决问题的能力。
2. 考试内容:
控制系统的数学描述:包括控制系统的运动方程式、传递函数、方框图及其简化、信号流图、状态空间描述等。
线性连续控制系统的分析:包括线性系统的时域法、根轨迹法、频域法、状态空间法、李雅普诺夫稳定性方法(含非线性情形)等。
线性离散控制系统的分析:包括线性系统的离散化、脉冲传递函数、线性离散控制系统的分析与设计等。
非线性系统的分析:包括相平面法、描述函数法等。
线性连续控制系统的综合:包括PID控制规律、控制系统的校正、线性系统的状态空间综合法等。
3. 试卷结构:考试时间180分钟,满分150分。
题型结构包括概念题、计算题、分析(或应用、或推证)题等。
以上信息仅供参考,如需哈尔滨工业大学控制考研大纲的详细内容,建议查阅哈尔滨工业大学研究生招生官网或咨询其招生办老师。
附件四:考试大纲格式
考试科目名称: 工程控制理论
考查要点:
一、控制系统概述
1.控制系统的基本组成;
2.自动控制系统的基本类型。
二、控制系统的数学模型
1.控制系统微分方程的线性化;
2.控制系统的传递函数与Laplace变换;
3.系统方块图、信号流图的简化与传递函数求解;
4.控制系统建模。
三、时域瞬态响应分析
1.二阶系统的瞬态响应性能指标及计算;
2.二阶系统的单位脉冲响应;
3.二阶系统的单位斜坡响应;
四、控制系统的频率特性
1.频率响应的Nyquist图、Bode图绘制方法;
2.由频率响应曲线求系统传递函数;
3.控制系统的闭环频率响应与频域指标。
五、控制系统的稳定性与快速性
1.Routh-Hurwitz判据
2.Nyquist稳定性判据
3.频域指标与时域指标的关系。
六、根轨迹法
1.绘制根轨迹的基本法则;
2.用根轨迹判断系统的稳定性。
七、控制系统的误差分析
1.稳态误差的概念与误差系数;
2.扰动信号作用下的稳态误差。
考试总分:150分考试时间:3小时考试方式:笔试考试题型:
选择题(20分)填空题(20分)
计算题(80分)综合应用(30分)
参考书目(包括书名、作者、、出版社、出版时间):
主要参考书:
①工程控制理论,胡国清、刘文艳编著,机械工业出版社,2004。
②自动控制原理,李友善主编,国防工业出版社,2005。
③自动控制原理,翁思义、杨平编著,中国电力出版社,2000。

第一章平面机构的结构分析一、机构的组成要素1.运动副机构是由许多构件组合而成的。
在机构中,每个构件都以一定的方式与其他构件相互连接。
相互连接的两构件既保持直接接触,又能产生一定的相对运动。
我们把两构件直接接触形成的可动联接称为运动副。
参与接触而构成运动副的点、线、面称为运动副元素。
按组成运动副两构件间的相对运动是平面运动还是空间运动,运动副分为平面运动副和空间运动副。
在此,仅讨论平面运动副。
1)按接触性质分,运动副分为低副和高副①面接触的运动副成为低副,例如滑块与导槽之间则为面接触②点接触或线接触的运动副成为高副,互相啮合的轮齿之间为点或线接触2)按所能产生相对运动的形式分为转动副、移动副、平面滑动副(高副)等①具有一个独立相对转动的运动副成为转动副②具有沿一个方向独立相对移动的运动副成为移动副我们把构件所具有的独立运动的数目成为自由度。
把对独立运动所加的限制成为约束。
每加上一个约束,构件便失去一个自由度。
低副(转动副和移动副)具有两个约束;高副具有一个约束。
2.运动链1)概念两个以上构件以运动副联接而成的系统成为运动链2)分类①闭链和开链如果组成运动链的每个构件至少包含两个运动副元素,则构件形成封闭系统,这种运动链成为闭链。
如果这种链中有的构件只包含一个运动元素,便成为开链如果构件通过运动副联接构成的是相对不可动系统,称为桥架或结构体,即成为一个构件②平面运动链和空间运动链根据运动链中各构件间的相对运动为平面运动还是空间运动,可将运动链分为平面运动链和空间运动链两类3.机构如果将运动链中某一构件固定而成为机架,并有一个或几个构件给定运动规律(原动件),使其余各构件(从动件)具有确定的相对运动,则该运动链便成了机构。
任何机构都包括机架、原动件和从动件三个部分二、平面机构运动简图机构运动简图是用规定的简单线条和符号代表构件和运动副,按比例尺定出各运动副的位置,准确表达机构运动特征的简单图形。
机构运动简图一定要严格按比例尺绘制,否则只能称为机构示意图。
上海工程技术大学硕士研究生入学考试《自动控制原理》考试大纲考试科目:自动控制原理考试科目代码:808考试参考书目:1、王建辉,顾树生.自动控制原理(第2版).清华大学出版社.2、刘豹,唐万生.现代控制理论(第3版).机械工业出版社.考试总分:150分考试时间:3小时一、考试目的和要求控制理论基础是一门主要的专业基础课,其主要目的是使学生掌握线性控制系统的基本概念、基本原理以及分析方法,为后继专业课程打下基础。
要求学生对经典控制理论及现代控制理论有全面的了解,掌握传递函数的概念及其求取方法,了解典型环节及其运动规律;能绘制一般系统的结构框图并进行简化,掌握信号流图绘制方法及梅逊公式;掌握一阶系统、二阶系统的时域响应;理解系统稳定性的概念和条件,掌握稳定性的判定方法;掌握稳态误差的求取以及降低稳态误差的方法;掌握根轨迹的绘制方法,能够根据根轨迹分析系统的性能;理解频率响应的概念,能绘制系统的奈奎斯特图和波德图;掌握控制系统的校正方法。
掌握线性定常时不变系统状态空间表达式的建立及求解、系统的能控能观性分析、状态反馈控制器及全维观测器的设计。
二、考试内容1. 自动控制系统的基本概念自动控制的基本概念;开环控制和闭环控制的特点;控制系统的基本组成、控制方式、分类和常用测试信号;控制系统的性能指标。
2. 自动控制系统的数学模型控制系统数学模型的定义;简单电路、机电系统微分方程、传递函数模型的建立;结构框图的绘制及等效变换;信号流图的绘制及梅逊增益公式的应用。
3. 自动控制系统的时域分析时域性能指标和系统稳定性条件;一阶、二阶系统的时域分析;主导极点、高阶系统时域分析;Routh稳定判据;稳态误差和稳态误差系数的计算。
4. 根轨迹法根轨迹的定义及根轨迹方程;根轨迹的绘制方法;根轨迹法在系统分析及计算中的应用。
5. 频率法系统频率特性的定义和表示法,典型环节的频率特性;系统奈奎斯特及伯德图的绘制方法;Nyquist稳定判据及应用;稳定裕度的含义及计算方法。
2024年哈工程自动控制原理考研大纲主要包括理论部分和应用部分。
在理论部分,主要内容包括基本概念、数学基础和自动控制系统的基本原理。
在应用部分,主要内容包括反馈控制系统的建模与分析、数值方法在控制系统中的应用、模拟器实验和控制系统设计等。
在基本概念中,会涉及到自动控制系统的定义、分类、基本组成和特点。
自动控制系统是由控制器、执行对象和反馈元件构成的。
根据系统的特点,可以分为连续系统和离散系统,线性系统和非线性系统,以及单输入单输出系统和多输入多输出系统等。
在数学基础中,主要包括微分方程的基本概念和求解方法。
控制系统的数学模型一般是通过方程组来描述的,这些方程往往是微分方程。
求解微分方程的方法有解析法和数值法,其中数值法在控制系统中的应用较为普遍,如欧拉法、龙格-库塔法等。
在自动控制系统的基本原理中,主要包括系统的建模与分析、稳定性分析和控制器的设计方法。
系统的建模是指将物理系统转化为数学模型的过程,一般可以使用传递函数进行描述。
稳定性分析是判断控制系统是否能够维持稳定运行的方法,一般有时域法和频域法两种。
控制器的设计方法主要是根据系统的特点进行选择,例如比例控制器、积分控制器和微分控制器等。
在反馈控制系统的建模与分析中,主要包括传递函数的导出和系统的分析。
传递函数是描述系统输入输出之间关系的函数,通常可以通过拉普拉斯变换将微分方程转化为代数方程。
系统的分析可以通过传递函数的特性来完成,如稳态误差、阶跃响应和频率响应等。
数值方法在控制系统中的应用主要包括仿真技术和最优控制方法。
仿真技术是通过计算机模拟控制系统的运行过程,可以对系统进行分析和优化。
最优控制方法是在满足约束条件下,选择一定的目标函数来使系统性能达到最好。
模拟器实验是通过计算机模拟真实实验的过程,可以对控制系统进行实验和分析。
控制系统设计是根据系统需求和性能指标,选择合适的控制器来实现系统的控制目标。
总结来说,2024年哈工程自动控制原理考研大纲主要包括自动控制系统的基本概念、数学基础、基本原理和应用等方面。
哈工程自控考研真题自动控制是工程技术的一门基础课程,也是哈尔滨工程大学自动化专业考研的一项重要内容。
下面将通过分析哈工程自控考研真题,探讨该学科的基本知识框架和解题思路。
一、控制系统概论控制系统是自动化技术的核心内容。
哈工程自控考研真题中涉及到的控制系统概论问题主要包括以下方面:控制系统的基本概念、控制系统的基本结构和功能、控制系统的数学模型与传递函数、控制系统的稳定性分析等。
在解答这些问题时,考生可以从理论角度出发,结合实际案例进行分析,并运用数学方法进行推导和计算。
二、信号与系统分析信号与系统是自动控制领域中的重要基础。
哈工程自控考研真题中的信号与系统分析问题主要包括信号的分类与性质、系统的时域分析和频域分析、系统的稳定性和响应性能分析等。
在解答这些问题时,考生需要掌握信号与系统的基本理论,能够运用拉普拉斯变换、傅里叶变换等数学工具对信号与系统进行分析和计算。
三、控制器与调节器控制器与调节器是自动控制系统中起着关键作用的设备。
哈工程自控考研真题中的控制器与调节器问题主要包括PID控制器的原理与设计、调节器的选择与调试等。
在解答这些问题时,考生需要掌握PID控制器的工作原理和参数调整方法,同时了解不同类型的调节器的特点和应用。
四、稳定性分析与校正稳定性是自动控制系统的重要性能指标,校正则是为了提高系统的稳定性和响应性能。
哈工程自控考研真题中的稳定性分析与校正问题主要包括系统的根轨迹和频率响应分析、稳定性判据的应用、校正方法的选择等。
在解答这些问题时,考生需要熟悉根轨迹和频率响应分析的原理和方法,能够运用Nyquist稳定性判据、校正方法的设计和调试。
五、多变量系统控制多变量系统控制是自动化技术的发展方向之一,也是哈工程自控考研真题中的重点内容之一。
多变量系统控制的问题主要包括多变量系统的建模与控制、多变量过程的解耦与互补等。
在解答这些问题时,考生需要了解多变量系统的特点和建模方法,掌握多变量控制的设计和实施技术,能够解决多变量过程的解耦和互补问题。
哈工程自动控制原理考研大纲
哈尔滨工程大学自动控制原理考研大纲主要包括以下几个部分:
一、自动控制的一般概念
1. 自动控制系统的基本概念
2. 基本控制方式
3. 反馈控制系统的组成
4. 控制系统的分类
5. 对控制系统的基本要求
二、控制系统的数学模型
1. 微分方程
2. 传递函数
3. 结构图
4. 信号流图
5. 控制系统的框图和传递函数
6. 非线性方程的线性化
三、线性系统的时域分析法
1. 典型输入信号及其时间响应
2. 系统时间响应的性能指标
3. 一阶系统时域分析
4. 二阶系统时域分析
5. 高阶系统时域分析
6. 控制系统的稳定性分析
7. 控制系统的稳态误差分析
四、根轨迹法
1. 根轨迹的基本概念
2. 根轨迹绘制的基本法则
3. 控制系统的根轨迹分析
4. 控制系统性能的根轨迹分析
五、频域分析法
1. 频率特性及其几何表示方法
2. 频率特性的性质和特点
3. 典型环节的频率特性分析
4. 控制系统的开环频率特性绘制与分析
5. 控制系统的闭环频率特性绘制与分析
6. 控制系统的稳定性分析
7. 控制系统的性能分析。
报考学科代码考试科目参考书目编(著)者出版社0811控制科学与工程801 控制原理《现代控制工程》第四版Katsuhito Ogata 电子工业出版社《自动控制原理》上、下册裴润,宋申民哈尔滨工业大学出版社《自动控制原理》第五版胡寿松科学出版社0801力学(航天学院)808 理论力学《理论力学》(第7版)哈尔滨工业大学理论力学教研室编高等教育出版社809 材料力学新编材料力学(第2版)张少实机械工业出版社材料力学(第三版上、下册)刘鸿文高等教育出版社810 弹性力学《弹性力学》(上册)徐芝纶高等教育出版社082501飞行器设计、082504人机与环境工程807 控制理论《自动控制原理》鄢景华哈工大出版社《自动控制原理》胡寿松国防工业出版社816 工程力学《理论力学》程靳高等教育出版社《材料力学》张少实机械工业出版社0803光学工程805 物理光学Ⅰ《物理光学》梁铨廷机械工业出版社《物理光学与应用光学》石顺祥西安电子科大出版社2000080901 物理电子学817 激光原理«激光原理»第五版周炳琨等国防工业出版社2004 «光电子学原理与应用»王雨三等哈工大出版社2002842 物理光学Ⅱ«物理光学与应用光学»石顺祥西安电子科大出版社2000080903微电子学与固体电子学085209集成电路工程806 半导体物理《半导体物理学》(第七版)刘恩科等电子工业出版社,2008年0810信息与通信工程803 信号与系统和数字逻辑电路《信号与系统》王宝祥哈工大出版社《信号与系统》(上、下)郑君里高等教育出版社《数字电路》龚之春电子科技大学出版社080904电磁场与微波技术804 电磁场与电磁波《电磁场与电磁波》邱景辉哈工大出版社2001《电磁场与电磁波习题解答》马汉炎哈工大出版社2002《电磁场与电磁波》赵家升电子科技大学出版社《电磁场与电磁波》陈抗生高等教育出版社20030807动力工程及工程热物820 工程流体力学《工程流体力学》陈卓如高等教育出版社(第二版)2004年(选答试题:工程热力学《工程热力学》严家騄中国电力出版社传热学《传热学》杨世铭、陶文铨高等教育出版社(第三版)理燃烧学《燃烧理论与设备》徐旭常机械工业出版社空气动力学)《气体动力学基础》潘锦珊国防工业出版社085212软件工程834 软件工程基础《软件工程_原理、方法与应用》史济民等高等教育出版社《C程序设计》谭浩强清华大学出版社0804仪器科学与技术826 电子技术基础 1.《模拟电子技术基础》王淑娟高等教育出版社,20102.《数字电子技术基础》杨春玲高等教育出版社,20103.《模拟电子技术基础》(第四版)华成英高等教育出版社,20064.《数字电子技术基础》(第五版)阎石高等教育出版社,20065.《电子技术基础》(模拟部分第五版)康华光高等教育出版社,20066.《电子技术基础》(数字部分第五版)康华光高等教育出版社,20067.《模拟电子技术基础学习指导与考研指南》王淑娟高等教育出版社,2009(第2次印刷)8.《数字电子技术基础学习指导与考研指南》王淑娟高等教育出版社,2010(第3次印刷)注:在(1)(2)(7)(8)、(3)(4)(7)(8)和(5)(6)(7)(8)中任选一套0808电气工程827 电路与数字电子技术电路部分教材:《电路理论基础(第三版)》陈希有高教出版社,2004年《电路(第五版)》邱关源高教出版社,2006年电路部分参考书:《电路考研大串讲》孙立山科学出版社,2006年《电路名师大课堂》,孙立山科学出版社,2006年数字电子技术部分:①《数字电子技术基础》杨春玲高等教育出版社,2010年②《数字电子技术基础》(第五版)阎石高等教育出版社,2006年③《数字电子技术基础》(数字部分第五版)康华光高等教育出版社,2006年④《数字电子技术基础学习指导与考研指南》王淑娟高等教育出版社,2010年,(第3次印刷)注:在(1)(4)、(2)(4)和(3)(4)中任选一套。
哈工大控制科学与工程考研801控制原理大纲一、课程概述(80字)控制工程是现代科学和技术中的一门重要学科,是利用各种控制方法和技术对各种系统进行调节、稳定和优化的学科。
本课程主要介绍经典控制理论的基本概念、分析方法和设计技术,为学生提供掌握控制原理的基础知识和分析能力。
二、教学内容(400字)(一)经典控制理论1.控制系统基本概念:信号、系统、控制等;2.信号与系统分析:时域分析、频域分析;3.系统建模与传递函数:微分方程、传递函数、状态空间;4.单输入单输出系统的稳定性分析:根轨迹法、频率响应法;5.单输入单输出系统的稳定性设计:根轨迹设计、频率响应设计。
(二)现代控制理论1.状态空间分析与设计:状态空间模型、可观性和可控性分析、极点配置;2.频率域分析与设计:频率响应函数、束缚角和幅值移相、李阿普诺夫法;3.综合控制设计:状态反馈、输出反馈、积分控制、鲁棒控制、自适应控制。
(三)应用实例1.传动系统的控制;2.运动控制系统的控制;3.温度控制系统的控制;4.液压控制系统的控制。
三、教学目标(200字)通过本课程的学习,要求学生具备以下能力:1.掌握经典控制理论的基本概念、分析方法和设计技术;2.熟悉现代控制理论的状态空间分析、频率域分析和综合控制设计方法;3.能够利用所学的控制原理理论知识进行实际控制系统的建模、分析和设计;4.具备一定的工程应用能力,能够应用控制原理解决实际问题。
四、教学方法(200字)本课程采用“理论教学与应用实践相结合”的教学方法,具体包括以下几个方面:1.理论课讲授:通过授课形式,对控制原理的基本概念、分析方法和设计技术进行讲解;2.实验课程:通过实验操作,锻炼学生分析和解决实际问题的能力,加深学生对控制原理的理解;3.课堂讨论:通过课堂讨论,促进学生的思维活跃和自主学习,提高学生的问题解决能力;4.课程设计:通过完成控制系统的建模、分析和设计任务,提高学生的综合应用能力。
哈工大研究生大纲
哈尔滨工业大学研究生考试大纲包括多个科目,具体如下:
1.高等数学:主要考察极限、连续、导数、积分等基本概念和定理,
以及其在几何与物理方面的应用。
2.线性代数:主要考察矩阵、向量、线性方程组、特征值与特征向
量等基本概念和性质,以及其在数学、工程和科学计算等方面的应用。
3.概率论与数理统计:主要考察概率、随机变量、随机过程、统计
推断等基本概念和性质,以及其在数据分析、工程和自然科学等方面的应用。
4.数值分析:主要考察数值计算的基本原理和方法,包括代数方程
求解、数值微积分、线性方程组求解、矩阵特征值与特征向量求解等。
5.计算机组成原理:主要考察计算机系统的基本组成和工作原理,
包括计算机的运算器、控制器、存储器、输入输出设备等。
6.计算机网络:主要考察计算机网络的基本原理和协议,包括
TCP/IP协议栈、路由协议、网络安全协议等。
7.数据结构与算法:主要考察常见的数据结构和算法,包括数组、
链表、栈、队列、二叉树等数据结构,以及排序、查找、图论算法等。
需要注意的是,不同专业的考试大纲可能会有所不同,具体以各学院公布的考试大纲为准。
哈工程自控控制原理参考书
以下是一些建议的参考书,供您参考:
1. 《现代控制工程》(作者:Katsuhiko Ogata):这是一本经典的控制工程教材,涵盖了自动控制的基本概念和方法。
2. 《控制系统工程基础》(作者:Norman S. Nise):这本教材系统地介绍了控制系统的概念、建模、分析和设计。
3. 《控制系统工程》(作者:I.J. Nagrath, M. Gopal):这本书介绍了控制系统的基本理论、设计方法和实际应用。
4. 《现代控制理论与应用》(作者:Alberto Isidori):这本书介绍了现代控制理论的一些重要概念和方法,适合高级读者。
5. 《自动控制原理及应用》(作者:李国杰):这是一本本科生自动控制课程的教材,内容覆盖了自动控制的基本原理和应用。
请注意,具体的教材选择可能会因教授风格、教学计划和个人学习偏好而有所不同。
您可以根据自己的具体情况选择最适合自己的参考书。
考试科目名称:自动控制事理
考查要点:
一、控制系统的数学模型
1、控制系统运动的建立;
2、控制系统的传递函数的概念及求取、方框图及其简化、信号流图及梅森公式。
二、线性系统的时域剖析
1、一阶、二阶系统的时域分析;
2、线性系统的稳定性基本概念及熟练掌握劳斯()稳定判据判别性的方法例
3、控制系统稳态误差分析及其计算成本;
4、复合控制。
三、根轨迹法
1、根轨迹、根轨迹方程及其绘制根轨迹的根基轨则;
2、理解控制系统根轨迹分析方法。
四、频率响应法
1、线性系统频率响应物理意义及其描述方法;
2、典型环节的频率响应(幅相曲线与对数频率特性曲线);
3、开环系统及闭环系统的频率响应的绘制;
4、奈奎斯特稳定判据和控制系统相对稳定性;
5、频域指标与时域指标的关系。
五、控制系统的校正与综合
1、频率响应法串联校正分析法;
2、基于频率响应法的串联、反馈校正的综合法设计。
六、非线性控制系统的剖析
1、了解典型非线性特征的输入输出关系(数学表达及关系曲线);
2、理解非线性环节对线性系统的影响;
3、相平面法、描述函数法剖析非线性节制系统。
七、数字控制系统的一般概念
1、采样过程、采样定理、零阶连结器的根基概念。
八、数字控制系统的数学基本
1、 Z变换的根基概念及计算方法;
2、 Z变换根基定理及Z反变换;
九、数字控制系统的数学描述
1、脉冲传递函数的概念及闭环脉冲传递函数的求取;
2、 (纯)离散系统方框图及其简化的方法。
十、数字控制系统分析
1、 Z平面的稳定性分析;
2、朱利稳定判据;
3、数字控制系统的暂态、稳态、误差分析。
十一、数字控制系统的设计
1、控制系统模拟化设计方法;
2、数字控制系统的离散化设计体例及起码拍离散系统设计;
十二、线性系统的状况空间描述
1、状况空间描述的基本概念;
2、线性时不变系统状况空间描述;
3、状况方程和输出方程的求取及其标准形;
4、传递函数阵;
5、特征多项式和特征值;
6、线性定常系统的行为剖析、状况转移阵、脉冲响应阵;
7、线性离散系统的状况空间描述。
十三、线性系统的能控性和能观性
1、能控性和能观性的根基概念;
2、能控标准和能观标准形;
3、能控性和能观性的判据。
十四、线性定常系统的线性变换
1、状况空间表达式的线性变换;
2、对偶性事理;
3、线性系统的结构分解。
十五、李雅普诺夫稳定性分析
1、李亚普诺夫意义下的运动稳定根基概念;
2、李亚普诺夫第二法主要定理;
3、系统行为稳定性判据。
十六、线性反馈系统的时刻域综合
1、状况反馈和输出反馈;
2、极点配置的设计方法;
3、状态观测器的设计;
4、状态观测器和状况反馈组合系统。
注:非线性控制系统部门(六)与数字控制系统(七~十一)部门任选其一。