微机保护算法综合仿真
- 格式:doc
- 大小:1.09 MB
- 文档页数:28
微机保护原理及算法仿真微机保护原理及算法仿真是在控制、自动化和保护三者之间建立一个交互性的模拟,提出并实施可靠的保护技术。
此外,该技术还可以在合理的成本当中有效地提升保护系统的可靠性和灵活性。
在实现微机保护原理的基础上,通过使用算法仿真技术,可以将保护系统的安全性提升到更高的水平。
微机保护原理是一种将控制、自动化和保护相结合的保护技术,目的是对不同规格的机组进行保护,避免由于系统故障而对设备和电网造成伤害。
基本原理是:一旦发生故障,保护装置可以快速、准确地识别、定位故障,并根据故障类型采取相应的保护措施,从而避免或限制系统故障扩大,减少或避免人身伤亡和财产损失。
算法仿真技术对实现微机保护原理有着重要的作用。
算法仿真一般采用四步方法:输入信息→处理过程→结果输出→结果分析。
在处理过程中,根据模型的结果,选择实施有效的保护策略。
算法仿真中,使用计算机模拟技术可以实时反映不同条件下电力系统的状态,比如励磁失调、交流故障、瞬时停电等。
在这个过程中,保护装置也可以根据实时变化的系统状态立即采取保护措施,从而有效防止系统故障的扩大和危害的扩散。
在算法仿真中,模拟系统的响应特性,可以通过连续变量或离散变量的连续变化来模拟,从而实现系统对故障的及时应答。
如果想要实现更完善的保护,则需要把控制装置建模,使其能够判断出系统故障情况,并采取相应的保护措施。
总之,微机保护原理及算法仿真是一种通过将控制、自动化和保护相结合的保护技术实现可靠保护的技术,可以充分发挥微机的优势,提高保护系统的可靠性、灵敏性和适应性,从而最大限度地减少操作错误、降低运行风险,有效地保障电网及设备的安全运行。

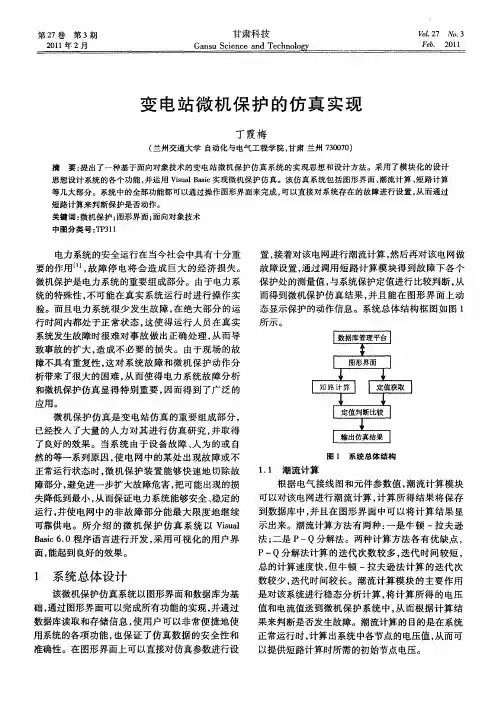
基于DSP的微机保护算法研究摘要:本文讨论了一种基于数字信号处理技术(DSP)的微机保护算法。
DSP技术可以有效地监控微机的系统参数,实时检测微机的故障,以便采取必要的保护措施。
首先,研究团队分析了DSP技术的特点,并讨论了DSP在微机保护中的应用,特别是运用DSP的采样、滤波、数据处理等处理过程。
接下来,本文提出了一种基于DSP的保护算法,该算法通过比较系统参数,在发生故障时及时发出保护信号。
本文还将讨论使用DSP进行微机保护算法研究的实验结果,以验证算法的有效性。
关键词:数字信号处理(DSP),微机保护,保护算法正文:1. 简介:近年来,随着信息技术的发展,微机已经广泛应用于工业控制及自动化领域。
然而,微机也受到许多故障的威胁,如硬件故障、温度变化、过载等,可能导致微机失效,给当地经济发展带来负面影响。
因此,研究微机保护技术显得尤为重要。
2. DSP技术:数字信号处理技术(DSP)是一种采用数字信号处理方式来进行信号处理的技术。
它主要利用数字信号的采样、滤波、数据处理等处理过程,可以有效地监控微机的系统参数,实时检测微机的故障,以便采取必要的保护措施。
3. 基于DSP的保护算法:本文提出了一种基于DSP的保护算法,该算法利用系统参数进行比较,针对系统参数变化,及时发出保护信号。
这种算法对重要参数及时进行监测,能够及时检测微机故障,及时采取预防措施,有效保护微机,以减少故障发生率。
4. 实验结果:本文利用实验测试了基于DSP的保护算法。
实验结果表明,该算法能够有效地检测微机故障并及时采取保护措施,可以有效改善微机的运行状况,从而实现微机的安全运行。
5. 总结:综上所述,基于数字信号处理技术的微机保护算法具有较高的实用性和可靠性,在微机安全运行方面具有重要作用。
6. 未来工作:本文的研究仅涉及DSP技术在微机保护中的应用,仍有许多其他技术措施可供研究。
下一步的研究可以从以下方面进行:首先,基于不同DSP系统,探索更有效的保护算法;其次,运用深度学习和机器学习技术改进算法,提升微机保护的准确率;最后,利用人工智能技术开发自动化的微机保护控制系统,构建完整保护网络,以更好地保护微机安全运行。
微机继电保护算法仿真电控学院一.两点乘积算法仿真(1)m atlab中编写的程序N=12;t=(0:0.02/N:0.02)';m=size(t);y=sin(2*pi*50*t);y1=[zeros(N/4,1);y(1:m-N/4)];ym=sqrt(y.^2+y1.^2);subplot(3,2,1)plot(t,y,'r.',t,y1,'xb');legend('y(k)','y(k-T/4)');title('两点乘积算法N=12');subplot(3,2,2)hold on;plot(t,ym,'-r');axis([0,0.02,0,1.2]);xlabel('t/s');ylabel('ym');title('两点乘积算法算的有效值N=12'); text(0.01,0.6,'N=12');N=16;t=(0:0.02/N:0.02)';m=size(t);y=sin(2*pi*50*t);y1=[zeros(N/4,1);y(1:m-N/4)];ym=sqrt(y.^2+y1.^2);subplot(3,2,3)plot(t,y,'r.',t,y1,'xb');legend('y(k)','y(k-T/4)'); title('两点乘积算法N=16');subplot(3,2,4)hold on;plot(t,ym,'-r');axis([0,0.02,0,1.2]);xlabel('t/s');ylabel('ym');title('两点乘积算法算的有效值N=16'); text(0.01,0.6,'N=16');N=24;t=(0:0.02/N:0.02)';m=size(t);y=sin(2*pi*50*t);y1=[zeros(N/4,1);y(1:m-N/4)];ym=sqrt(y.^2+y1.^2);subplot(3,2,5)plot(t,y,'r.',t,y1,'xb');legend('y(k)','y(k-T/4)');title('两点乘积算法N=24');subplot(3,2,6)hold on;plot(t,ym,'-r');title('两点乘积算法算的有效值N=24'); axis([0,0.02,0,1.2]);xlabel('t/s');ylabel('ym');text(0.01,0.6,'N=24');(2)仿真出的波形(3)流程图输入信号y=sin(2*pi*50*t)m=size(t);得到离散的两点y1=[zeros(N/4,1);y(1:m-N/4)]输出ym=sqrt(y.^2+y1.^2) N=12,即采样频率f=600HZ,原始信号离散化二.傅里叶算法仿真(1)matlab中编写的程序T=0.02;t1=0.02;N=12;Ts=T/N;t=0:Ts:4*T;y=(exp(-t/t1)-cos(2*pi*50*t));subplot(3,2,1);plot(t,y,'.r');xlabel('t/ms');ylabel('y(t)');title('输入信号N=12');a=1;i=1:N;bs=sin(2*pi*i/N);bc=cos(2*pi*i/N);ys=filter(bs,a,y);yc=filter(bc,a,y);ym=2*abs(complex(ys,yc))/N;subplot(3,2,2);hold onplot(t,ym)xlabel('t/ms');ylabel('ym');title('傅里叶算法计算的有效值N=12'); hold onT=0.02;t1=0.02;N=16;Ts=T/N;t=0:Ts:4*T;y=(exp(-t/t1)-cos(2*pi*50*t));subplot(3,2,3);plot(t,y,'.r');xlabel('t/ms');ylabel('y(t)');title('输入信号N=16');a=1; i=1:N;bs=sin(2*pi*i/N);bc=cos(2*pi*i/N);ys=filter(bs,a,y);yc=filter(bc,a,y);ym=2*abs(complex(ys,yc))/N;subplot(3,2,4);plot(t,ym)xlabel('t/ms');ylabel('ym');title('傅里叶算法计算的有效值N=16'); T=0.02;t1=0.02;hold onN=24;Ts=T/N;t=0:Ts:4*T;y=(exp(-t/t1)-cos(2*pi*50*t));subplot(3,2,5);plot(t,y,'.r');xlabel('t/ms');ylabel('y(t)');title('输入信号N=24');a=1;i=1:N;bs=sin(2*pi*i/N);bc=cos(2*pi*i/N);ys=filter(bs,a,y);yc=filter(bc,a,y);ym=2*abs(complex(ys,yc))/N;subplot(3,2,6);plot(t,ym)xlabel('t/ms');ylabel('ym');title('傅里叶算法计算的有效值N=24');(2)仿真出的波形(3)流。
微机保护算法是什么平时我们经常会用到加减算法,其实,微机也需要用的到这种算法,只是我们不经常接触,所以也不太了解,那么今天店铺就给大家稍微讲一点关于微机保护算法的知识吧。
首先就是微机保护算法的定义,微机保护算法其实不像普通的加减算法那么简单,它其实是根据很多个数据来求得被测信号量值的一种方法。
它所要解决的问题主要是电流、电压、相位、序分量这些。
下面店铺就给大家讲讲微机算法的主要的几个方面:两点乘积算法、导数算法、傅里叶算法、R-L算法、电流图变量算法和选相元件算法。
按照分类来说呢,有三种,第一种是以两点算法、三点算法、导数算法这些基于正弦信号的算法;第二种是傅里叶算法为主的基于周期信号的算法;第三种是以卡尔曼滤波为主的基于随机信号的算法。
基于正弦信号的算法公式如果是以ω代表角频率,I代表电流有效值,Ts代表采样间隔,αoi代表电流初相角的话,那么具体公式可以表现为:i(nTs)=√2Isin(ωnTs+αol)。
傅里叶算法呢其实是一种纯频域算法,它可以将满足条件的函数转换成正弦或者是余弦函数。
主要公式有两种:一种是傅里叶正变换一种是傅里叶逆变换。
讲了这么多,小编再给大家讲讲微机保护的原理吧。
其实,微机保护也有一个复杂的过程:首先它包含了很多个系统和回路,比方说主要作用是数据采集的模拟量输入系统,还有cpu系统,还有开关量输入/输出回路,在入机接口的部分还有打印、显示等等的各种开关,此外,还有通讯接口、电源等等。
在微机保护方面,还有几个要注意的事项,比方说在硬件方面,要注意隔离和屏蔽,排除信号的干扰;其二是电源的抗干扰性要好;第三就是信号传输线的抗干扰性;第四是可以采用印刷电路板的抗干扰,第五个就是最重要的就是要进行联网。
在软件方面,要注意输入数据的正确性,要对运算结果进行核对,此外,还有注意出口的封锁等等。
讲了这些,相信大家也对简单的微机保护算法也有一定的理解了吧。
如果小编有幸帮到了大家,请记得以后多多关注一下土巴兔装修网站哦。