基于异步电动机动态数学模型的矢量控制变压变频调速系统
- 格式:ppt
- 大小:1.63 MB
- 文档页数:98

《运动控制系统》课程试卷(A 卷)答案第1篇 直流调速系统(60分)一、填空题(每空1分,共23分)1. 运动控制系统由电动机、功率放大与变换装置、控制器及相应的传感器等构成。
2. 转矩控制是运动控制的根本问题,磁链控制与转矩控制同样重要。
3. 生产机械常见的三种负载是恒转矩负载、恒功率负载和平方率负载。
4. 某直流调速系统电动机额定转速1430/min N n r =,额定速降115/min N n r ∆=,当要求静差率30%s ≤时,允许的调速范围为5.3,若当要求静差率20%s ≤时,则调速范围为3.1,如果希望调速范围达到10,所能满足的静差率是44.6%。
5. 数字测速中,T 法测速适用于低速,M 法测速适用于 高速 。
6. 生产机械对调速系统转速控制的要求有 调速 、稳速和加减速 三个方面。
7、直流电机调速的三种方法是:调压调速、串电阻调速和弱磁调速。
8、双闭环直流调速系统的起动过程分为电流上升阶段、恒流升速阶段和 转速调节三个阶段。
9. 单闭环比例控制直流调速系统能够减少稳态速降的实质在于它的自动调节作用,在于它能随着负载的变化而相应的改变电枢电压,以补偿电枢回路电阻压降的变化。
二、选择题(每题1分,共5分)1、双闭环直流调速系统,ASR 、ACR 均采用PI 调节器,其中ACR 所起的作用为( D )。
A 、实现转速无静差B 、对负载变化起抗扰作用C 、输出限幅值决定电动机允许的最大电流D 、对电网电压波动起及时抗扰作用2、典型I 型系统与典型II 型系统相比,( C )。
A 、前者跟随性能和抗扰性能均优于后者B 、前者跟随性能和抗扰性能不如后者C 、前者跟随性能好,抗扰性能差D 、前者跟随性能差,抗扰性能好3、转速单闭环调速系统对下列哪些扰动无克服能力,( D )。
A 、电枢电阻B 、负载转矩C 、电网电压D 、速度反馈电位器4、下述调节器能消除被控制量稳态误差的为( C )。
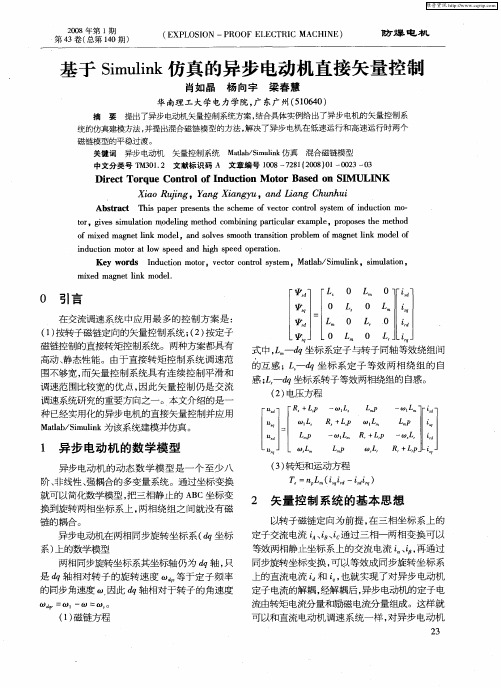
摘要众所周知,交流异步电机因其结构简单、可靠性高、性能优良、输出转矩大等特点,被广泛的应用,且随着交流异步电机应用领域的不断拓宽,对电机控制系统的设计要求越来越高,既要考虑成本低廉、控制算法合理,又需兼顾控制性能好、开发周期短等特点。
然而变频调速具有高效率、宽范围和高精度等特点,是目前运用最广泛且最有发展前途的调速方式。
交流电动机变频调速系统的种类很多,从早期提出的电压源型变频器开始,相继发展了电流源型,脉宽调制等各种变频器。
本文在分析交流异步电机数学模型的基础上,提出矢量控制。
矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
然后借助于MATLAB 仿真建模能力,提出了一种基于MATLAB的矢量控制变频调速系统仿真模型的新方法。
其基本思想是:将交流感应电机控制系统的功能单元模块化,MATLAB中建立独立的功能模块:交流异步电机本体模块、矢量控制模块、速度控制模块、转矩计算模块等,这些功能模块进行有机整合,即可搭建出交流异步电机系统的仿真模型。
控制系统中,速度环采用PI 控制,方法简捷,效果理想。
仿真结果证明了该种新型建模方法的快速性和有效性。
关键词:异步电动机,矢量控制,变频调速,MATLABMatlab-based Vector Control Frequency Control System AnalysisABSTRACTAs is known to all, because of its simple structure, high reliability, good performance, output torque big wait for a characteristic, communication, and widely used asynchronous motor with ac induction motor is expanding, and the fields of application of motor control system design requirements more and more high, both must consider low cost, control algorithm and reasonable and need to juggle good control performance, short development cycle, etc. Therefore, how to establish an effective communication asynchronous motor control system simulation model becomes the motor control algorithm design personnel urgent need to address the key problem. Based on the analysis of ac induction motor based on mathematical model, with the aid of MATLAB simulation modeling ability, strong in the function of using SIMULINK embedded components, proposed based on MATLAB/SIMULINK establish ac asynchronous motor control system simulation model of the new method. The basic idea is: will ac induction motor control system function module, MATLAB/SIMULINK unit in establishing the independent function module: ac induction motor ontology modules, vector control module, current hysteresis control module, speed control module, torque calculation module,the functional modules, can build the organic integration of ac indution motor system simulation model. Control system, the speed loop, current loop by PI control by hysteresis current control, the method is simple, the effect is ideal. The simulation results prove the new quickness and the effectiveness of modeling method.Key words:Induction motor, vector control, frequency control, MATLAB基于Matlab的矢量控制变频调速系统分析马晓文0213071280 引言70年代西门子工程师F.Blaschke首先提出异步电机矢量控制理论来解决交流电机转矩控制问题。

矢量控制学习心得体会这学期跟着严老师学习了运动控制这门课程,加深了对电机拖动在实例中的运用,而矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量 (励磁电流) 和产生转矩的电流分量 (转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。
异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,虽然通过坐标变换可以使之降阶并简化,但并没有改变其非线性、多变量的本质。
因此,需要异步电动机调速系统具有高动态性能时,必须面向这样一个动态模型。
按转子磁链定向的矢量控制系统便是其中一种。
异步电动机经过坐标变换可以等效成直流电动机,那么,模仿直流电动机的控制策略,得到直流电动机的控制量,经过相应的坐标反变换,就能够控制异步电动机了。
由于进行坐标变换的是电流的空间矢量,所以这样通过坐标变换实现的控制系统就叫作矢量控制系统,简称VC系统。
在设计矢量控制系统时,可以认为,在控制器后面引入的反旋转变换器VR-1与电机内部的旋转变换环节VR抵消,2/3变换器与电机内部的3/2变换环节抵消,如果再忽略变频器中可能产生的滞后,则图6-53中虚线框内的部分可以完全删去,剩下的就是直流调速系统了。
可以想象,这样的矢量控制交流变压变频调速系统在静、动态性能上完全能够与直流调速系统相媲美。
矢量变换包括三相/两相变换和同步旋转变换。
在进行两相同步旋转坐标变换时,只规定了d,q两轴的相互垂直关系和与定子频率同步的旋转速度,并未规定两轴与电机旋转磁场的相对位置,对此是有选择余地的。
按照图6-53的矢量控制系统原理结构图模仿直流调速系统进行控制时,可设置磁链调节器AψR 和转速调节器ASR分别控制ψr和ω,如图6-55所示。

目录摘要I1绪论11.1交流调速技术概况11。
2异步电动机矢量控制原理22矢量控制理论42.1矢量控制42.2异步电机的动态数学模型52.3坐标变换73矢量控制系统硬件设计93。
1矢量控制结构框图93.2矢量控制系统的电流闭环控制方式思想9 3。
3各个子系统模块103.4矢量控制的异步电动机调速系统模块124 SIMULINK仿真134.1MATLAB/S IMULINK概述134。
2仿真参数134。
3仿真结果145总结16参考文献17摘要异步电机的物理模型之所以复杂,关键在于各个磁通间的耦合。
本设计把异步电动机模型解耦成有磁链和转速分别控制的简单模型,就可以模拟直流电动机的控制模型来控制交流电动机。
综合矩阵变换的控制策略及异步电动机转子磁场定向理论,采用计算机仿真方法分别建立了矩阵变换仿真模型以及基于矩阵变换的异步电动机矢量控制系统仿真模型,对矩阵变换的控制原理、输入、输出性能以及矢量控制系统的优质的抗扰能力及四象限运行特性进行分析验证,展现了该新型交流调速系统的广阔发展前景,并针对基于矩阵变换的异步电动机矢量控制系统的特点,着重对矢量控制单元进行了软件设计。
直接矢量控制就是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果.本文研究了矢量控制系统中磁链调节器的设计方法。
并用MATLAB最终得到了仿真结果。
关键词:坐标变换;矢量控制;MATLAB/simulink1绪论1.1交流调速技术概况工农业生产、交通运输、国防军事以及日常生活中广泛应用着电机传动,其中很多机械有调速要求,如车辆、电梯、机床及造纸机械等,而风机、水泵等为了减少损耗,节约电能也需要调速。
过去由于直流调速系统调速方法简单、转矩易于控制,比较容易得到良好的动态特性,因此高性能的传动系统都采用直流电机,直流调速系统在变速传动领域中占统治地位。
但是直流电机的机械接触式换向器结构复杂、制造成本高、运行中容易产生火花、需要经常的维护检修,使得直流传动系统的运营成本很高,特别是由于换向问题的存在,直流电机无法做成高速大容量的机组,如目前3000转/分左右的高速直流电机最大容量只有400千瓦左右,低速的也只能做到几千千瓦,远远不能适应现代生产向高速大容量化发展的要求.交流电机高效调速方法的典型是变频调速,它既适用于异步电机,也适用于同步电机.交流电机采用变频调速不但能实现无极调速,而且根据负载的特性不同,通过适当调节电压和频率之间的关系,可使电机始终运行在高效区,并保证良好的动态特性。

基于交流电动机动态模型的直接矢量控制系统的仿真与设计姓名:班级:电气三班学号:专业:电气工程及其自动化1.引言异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,通过坐标变换,可以使之降阶并化简,但并没有改变其非线性、多变量的本质。
需要高动态性能的异步电机调速系统必须在其动态模型的基础上进行分析和设计,但要完成这一任务并非易事。
经过人们的多年的潜心研究和实践,有几种控制方案已经获得了成功的应用,目前应用最广的就是矢量控制系统。
直接矢量控制就是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果。
本文研究了交流电动机动态模型的直接矢量控制系统的设计方法。
并用MATLAB 最终得到出仿真结果。
2. 矢量控制系统结构异步电动机经过坐标变换可以等效成直流电动机,那么,模仿直流电动机的控制策略,得到直流电动机的控制量,再经过相应的坐标反变换,就能够控制异步电动机了。
由于进行坐标变换的是电流(代表磁动势)的空间矢量,所以这样通过坐标变换实现的控制系统就称为矢量控制系统(VectorControlSystem),简称VC 系统。
VC 系统的原理结构如图1所示。
图中的给定和反馈信号经过类似于直流调速系统所用的控制器,产生励磁电流的给定信号*m i 和电枢电流的给定信号*t i ,经过反旋转变换1-VR 一得到*αi 和*βi ,再经过2/3变换得到*A i 、*B i 和*C i 。
把这三个电流控制信号和由控制器得到的频率信号1ω加到电流控制的变频器上,所输出的是异步电动机调速所需的三相变频电流。
图1 矢量控制系统原理结构图在设计VC 系统时,如果忽略变频器可能产生的滞后,并认为在控制器后面的反旋转变换器1-VR 与电机内部的旋转变换环节VR 相抵消,2/3变换器与电机内部的3/2变换环节相抵消,则图1中虚线框内的部分可以删去,剩下的就是直流调速系统了。
可以想象,这样的矢量控制交流变压变频调速系统在静、动态性能上完全能够与直流调速系统相媲美。

动车组传动与控制复习题及参考答案中南⼤学⽹络教育课程复习题及参考答案动车组传动与控制⼀、名词解释:1.异步电动机的机械特性2.ATP3.电流型牵引变流器4.两电平式逆变器5.PI调节器6.准圆形磁链轨迹控制⼆、简答题:1.简述动车组的⼏种传动⽅式。
2.简述交流传动系统的优点。
3.CRH2型动车组牵引变压器低压侧共有哪些绕组?分别向哪些设备供电?4.动车组牵引变流器与牵引电机之间的参数匹配有哪⼏种⽅案?5.简述异步电动机的⼯作原理。
6.简要分析⽐较动⼒分散⽅式和动⼒集中⽅式动车组的特点。
7.简述异步电动机变压变频调速控制发展的三个阶段。
8.简述异步电动机⽮量控制的基本思想。
9.简述异步电动机直接转矩控制的基本思想。
10.直接转矩控制(DTC)与⽮量控制(VC)在控制⽅法上有何异同?11.异步电动机转差频率控制的规律是什么?12.简述四象限脉冲整流器的基本⼯作原理。
13.简述牵引变流器的类型及特点。
14.简述电压型四象限脉冲整流器的特征。
15.简述两电平脉冲整流器PWM控制原理。
16.简述牵引变流器中间直流储能环节的作⽤和组成。
17.简述CRH1型动车组牵引传动系统主电路的组成、各组成部分所包括的主要设备。
18.简要分析CRH1型动车组辅助供电系统。
19.简要分析CRH2型动车组辅助供电系统。
20.简述CRH2型动车组牵引传动系统的组成。
21.简述列车牵引⽹络控制系统的基本构成。
三、综合分析题:1.试分析CRH2型动车组牵引传动系统的特点。
2.试分析⾼速动车组牵引传动系统所采⽤的新技术。
3.试分析下图所⽰异步电动机转差频率控制系统的控制过程。
参考答案⼀、名词解释:1.异步电动机的机械特性:异步电动机的机械特性是指其转差率与电磁转矩之间的关系T em=f(s)。
2.ATP:列车⾃动保护系统(Automatic Train Protection,简称:ATP),亦称列车超速防护系统,其功能为列车超过规定速度时即⾃动制动,当车载设备接收地⾯限速信息,经信息处理后与实际速度⽐较,当列车实际速度超过限速后,由制动装置控制列车制动系统制动。




基于DSP的异步电机无速度传感器的矢量控制仿真毕业设计(论文)本科生毕业设计设计题目:基于DSP的异步电动机无速度传感器的矢量控制研究中国矿业大学毕业设计任务书毕业设计题目:基于DSP的异步电动机无速度传感器的矢量控制研究毕业设计主要内容和要求:1. 复习电力拖动自动控制系统课程,重点学习异步电机变压变频调速系统理论(包括异步电机动态数学模型和坐标变换技术、转子磁场定向矢量控制系统),了解国内外无传感器控制的现状及发展趋势;2. 学习TMS320C2812DSP;3.学习观测器理论、模型参考自适应等相关理论;掌握异步电动机矢量控制的方法;4.完成异步电动机转子磁链估计模型的DSP实现;5. 采用Matlab/Simulink对转子磁场定向矢量控制系统进行仿真。
院长签字:指导教师签字:中国矿业大学毕业设计指导教师评阅书指导教师评语(①基础理论及基本技能的掌握;②独立解决实际问题的能力;③研究内容的理论依据和技术方法;④取得的主要成果及创新点;⑤工作态度及工作量;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:指导教师签字:年月日中国矿业大学毕业设计评阅教师评阅书评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;③工作量的大小;④取得的主要成果及创新点;⑤写作的规范程度;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:评阅教师签字:年月日中国矿业大学毕业设计答辩及综合成绩答辩情况提出问题回答问题一正基本有确正确般性错误有原没有则性回答错误答辩委员会评语及建议成绩:答辩委员会主任签字:年月日学院领导小组综合评定成绩:学院领导小组负责人:年月日摘要异步电动机的动态数学模型是一个高阶、非线性,强耦合的多变量系统。
采用坐标变换的方式将三相静止坐标系变为两相同步旋转坐标系,可以实现定子电流的解耦,从而实现磁通和转矩的解耦控制,达到直流电机的控制效果。




基于Matlab转差频率控制的矢量控制系统的仿真概述:常用的电机变频调速控制方法有电压频率协调控制(即v/F比为常数)、转差频率控制、矢量控制以及直接转矩控制等。
其中,矢量控制是目前交流电动机较先进的一种控制方式。
它又有基于转差频率控制的、无速度传感器和有速度传感器等多种矢量控制方式。
其中基于转差频率控制的矢量控制方式是在进行U /f恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对输出频率f进行控制的。
采用这种控制方法可以使调速系统消除动态过程中转矩电流的波动,从而在一定程度上改善了系统的静态和动态性能,同时它又具有比其它矢量控制方法简便、结构简单、控制精度高等特点。
Simulink仿真系统是Matlab最重要的组件之一,系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统,从而达到系统分析的目的。
在此利用Matlab/Simulink软件构建了转差频率矢量控制的异步电机调速系统仿真模型,并对此仿真模型进行了实验分析。
矢量控制是目前交流电动机的先进控制方式,一般将含有矢量交换的交流电动机控制都称为矢量控制,实际上只有建立在等效直流电动机模型上,并按转子磁场准确定向地控制,电动机才能获得最优的动态性能。
转差频率矢量控制系统结构简单且易于实现,控制精度高,具有良好的控制性能、因此,早起的矢量控制通用变频器上采用基于转差频率控制的矢量控制方式。
基于此,本文在Mtalab/Simulink环境下对转差频率矢量控制系统进行了仿真研究。
1转差频率矢量控制系统由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
转差频率矢量控制是按转子磁链定向的间接矢量控制系统,不需要进行复杂的磁通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过检测定子电流和旋转磁场角速度,通过两相同步旋转坐标系(M-T坐标系)上的数学模型运算就可以实现间接的磁场定向控制。