FutabaS3010参数说明
- 格式:pdf
- 大小:29.74 KB
- 文档页数:9
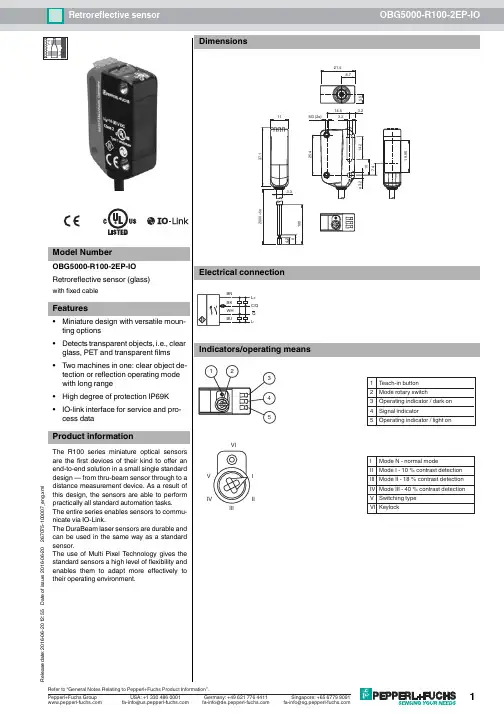
R e l e a s e d a t e : 2016-06-20 12:55D a t e o f i s s u e : 2016-06-20267075-100007_e n g .x m lT echnical dataG eneral specifications Effective detection range 0 ... 3.5 m in TEACH mode ; 0 ... 5 m at switch position "N"Reflector distance0 ... 3.5 m in TEACH mode ; 0 ... 5 m at switch position "N"Threshold detection range 6 mReference target H85-2 reflector Light source LEDLight typemodulated visible red light LED risk group labelling exempt groupDiameter of the light spot approx. 300 mm at a distance of 3.5 m Angle of divergence approx. 5 °Ambient light limitEN 60947-5-2Functional safety related parametersMTTF d 600 a Mission Time (T M ) 20 a Diagnostic Coverage (DC) 0 %Indicators/operating means Operation indicatorLED green:constantly on - power on flashing (4Hz) - short circuitflashing with short break (1 Hz) - IO-Link mode Function indicatorY ellow LED:Permanently lit—light path clear Permanently off—object detectedFlashing (4Hz)—operating reserve not reached Control elements T each-In keyControl elements5-step rotary switch for operating modes selection Contrast detection levels10 % - clean, water filled PET bottles 18 % - clear glass bottles40 % - colored glass or opaque materials Adjustable via rotary switchElectrical specifications Operating voltage U B 10 ... 30 V DC Ripplemax. 10 %No-load supply current I 0< 25 mA at 24 V supply voltage Protection class IIIInterfaceInterface type IO-Link ( via C/Q = BK )Transfer rate COM 2 (38.4 kBaud)IO-Link Revision 1.1Min. cycle time 2.3 msProcess data witdhProcess data input 2Bit Process data output 2Bit SIO mode support yesDevice ID0x110A01 (1116673)Compatible master port typeAOutputSwitching typeThe switching type of the sensor is adjustable. The default set-ting is:C/Q - BK: NPN normally open / dark-on, PNP normally closed / light-on, IO-Link/Q - WH: NPN normally closed / light-on, PNP normally open / dark-onSignal output 2 push-pull (4 in 1)outputs, short-circuit protected, reverse pola-rity protected, overvoltage protected Switching voltage max. 30 V DCSwitching current max. 100 mA , resistive load Usage category DC-12 and DC-13Voltage dropU d ≤ 1.5 V DC Switching frequency f500 Hz Response time1 msAmbient conditions Ambient temperature -20 ... 60 °C (-4 ... 140 °F) , movable cable not appropriate for conveyor chainsStorage temperature-40 ... 70 °C (-40 ... 158 °F)Mechanical specifications Degree of protection IP67 / IP69 / IP69K Connection 2 m fixed cableMaterial Housing PC (Polycarbonate)Optical face PMMA Mass approx. 36 g Cable length 2 m Compliance with standards and directi-vesDirective conformity EMC Directive 2004/108/EC EN 60947-5-2:2007+A1:2012Other suitable accessories can be found at AccessoriesV31-WM-2M-PURFemale cordset, M8, 4-pin, PUR cable V31-GM-2M-PURFemale cordset, M8, 4-pin, PUR cable REF-H85-2Reflector, rectangular 84.5mm x 84.5mm, mounting holesREF-H50Reflector, rectangular 51 mm x 61 mm, mounting holes, fixing strap REF-H33Reflector with screw fixingIO-Link-Master02-USBIO-Link master, supply via USB port or se-parate power supply, LED indicators, M12 plug for sensor connection OFR-100/100Reflective tape 100 mm x 100 mmR e l e a s e d a t e : 2016-06-20 12:55D a t e o f i s s u e : 2016-06-20267075-100007_e n g .x m lTeach-in:Use the rotary switch to select the required operating mode: Normal mode (N) or contrast level I – III.To teach in a threshold or activate an operating mode, press the "TI" button until the yellow and green LEDs flash in phase (approx. 1s).Release the "TI" button. T each-in starts.Successful teach-in is indicated by alternating flashing (2.5Hz) of the yellow and green LEDs. The sensor will now operate in the selected opera-ting mode with the taught-in threshold.An unsuccessful teach-in is indicated by rapidly alternating flashing (8Hz) of the yellow and green LEDs. After an unsuccessful teach-in, the sen-sor continues to operate with the previous valid setting after the relevant visual fault signal is issued.Every taught-in switching threshold can be re-taught (overwritten) by pressing the "TI" button again.Note: To ensure that the device functions reliably in Contrast mode, the device must be powered on at least 30s before Teach-in.Setting the Device to Maximum SensitivityUse the rotary switch to select the Normal mode (N) position.Press the "TI" button for >4s. The yellow and green LEDs will go out.Release the "TI" button.The settings will be reset to maximum sensitivity. After successfully resetting, the yellow and green LEDs will flash alternately (2.5Hz).Switching between light on/dark onUse the rotary switch to select the light on/dark on (L/D) position.Press the "TI" button for >1s.Standard conformityProduct standard EN 60947-5-2:2007+A1:2012 IEC 60947-5-2:2007 + A1:2012StandardsUL 60947-5-2: 2014 IEC 61131-9:2013 EN 62471:2008 EN 61131-9:2013Approvals and certificates UL approvalE87056 , cULus Listed , class 2 power supply , type rating 1Curves/DiagramsSettingsRelative received light strength in switch position "N"R e l e a s e d a t e : 2016-06-20 12:55D a t e o f i s s u e : 2016-06-20267075-100007_e n g .x m lT o reset the switching type, press the "TI" button for >4s.The respective operating indicator LED (L/D) will illuminate green and the operating indicator will be reset to the most recently active switching type.Reset to Default SettingsUse the rotary switch to select the O position.Press the "TI" button for >10s. The yellow and the green LEDs will both switch off.Release the "TI" button. The yellow LED is on.After resetting, the sensor will operate with the following default settings:•Normal mode (N)•Maximum sensitivity adjustment •Dark on•Pin 2 (white core): antivalent switching output。
P10-1-1●DN-843V-600V/DN-848VI-10V/DN-848VI-80V/DN-848VI-150V- - - - - - - - - - - - P 10-1-1Current P10-2-1●DN-843I-CT-1/DN-843I-CT-10/DN-843I-CT-20/DN-843I-CT-50 - - - - - - - - - - - - P 10-2-1P10-3-1●SG-3011/SG-3013/SG-3016/SG-3071/SG-3081 - - - - - - - - - - - - - - - - - - - - - - P 10-3-1 ●PW-3090-24S/PW-3090-12S/PW-3090-5S/PW-3090-4824S-12 - - - - - - - - - - - - P 10-3-1Relay Modules P10-4-1●DN-PR4//RM-104, RM-108, RM-116/RM-204, RM-208, RM-216 - - - - - - - - - - - P 10-4-1 ●DN-SSR4/DN-SSR4DC●RM-20.22/RM-22.22/RM-38.61/RM-48.61/RM-48.62Power Supplies P10-5-1●KA-52F/DIN-KA52F/KA52F-48/DIN-KA52F-48 - - - - - - - - - - - - - - - - - - - - - - - P 10-5-1 ●MDR-20-24/MDR-60-24/MDR-60-48 ●DP-660/DP-1200P10-6-1●TPM-4100/TP-4100 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - P 10-6-1 ●TP-3070 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - P 10-6-2MISC P10-7-1●I-7560/USB-2020/USB-2560/RK-3UD-R - - - - - - - - - - - - - - - - - - - - - - - - - - P 10-7-1AccessoriesProfessional Provider of High Quality I ndustrial C omputer P roducts and D ata A cquisition S ystems Vol. PAC 2.0.0A c c e s s o r i e s101Vout1GND Vout2GND Vout3GND+Vs GND F .G.NC Vin 1 -Vin 1+NC Vin 2 -Vin 2+NC Vin 3 -Vin 3+Vin 1 -Vin 1+Vin 2 -Vin 2+Vin 3 -Vin 3+Vin 4 -Vin 4+Vin 5 -Vin 5+Vin 6 -Vin 6+Vin 7 -Vin 7+Vin 8 -Vin 8++Vs GND F .G.Vout1 +OP Amp1OP Amp2OP Amp3OP Amp4OP Amp5OP Amp6OP Amp7OP Amp8Vout1 -Vout2 +Vout2 -Vout3 +Vout3 -Vout4 +Vout4 -Vout5 +Vout5 -Vout6 +Vout6 -Vout7 +Vout7 -Vout8 +Vout8 -DN-843V-600VDN-848VI-10V/DN-848VI-80V/DN-848VI-150V10.1. Voltage AttenuatorThe DN-800V series are voltage input attenuator . The maximum input range is from ±80 V to +/- 600 V and can be attenuated to ±10 V . The "I" version provide 3000 V DC intra-modules isolation and 3000 V DC channel to channel isolation to avoid the noise interference from inputs to outputs or channel to channel. It can be used with the analog input modules such as I-7017 and I-87017 etc. to measure the high voltage.DN-848VI-80VDN-848VI-150VAC/DC Source InputHigh Voltage Input Measurement Linear Attenuation Ratio High Input ImpedanceChannel to Channel Isolation forDN-848VI-10V , DN-848VI-80V and DN-848VI-150V 4 kV ESD Protection 3 kV Surge Protection RoHS ComplianceOperating Temperature: -25 ~ +75°C Easily Wire ConnectionDN-848VI-10VDN-843V-600V IntroductionApplicationsAppearanceProgrammable Automation Controller Products10-1-2Website:E-mail:*******************.PAC2.0.00Accessories101General Channels 8883Input Type AC/DC VoltageInput Range +/- 10 V pp+/- 80 V pp+/- 150 V pp+/- 600 V ppOutput Range +/- 10 V pp Accuracy1% of FSRChanel to Channel Isolation Yes, 3000 V DC-Bandwidth 30 KHz100 KHzInput Impedance> 1 M ΩIntra-module Isolation, Input to Output 3000 V DC -EMS Protection ESD (IEC 61000-4-2)+/- 4 kV contact for power line, input and output channels , +/- 8 kV air for random pointSurge (IEC 61000-4-5)+/- 3 kV for power linerPower Input Input Range +10 ~ +30 V DCPower Consumption 9.2 W9.2 W9.2 W0.56 WMechanicalDimensions (W x L x H)122 mm x 174 mm x 33 mm122 mm x 174 mm x 24.5 mmInstallation DIN-Rail MountingEnvironment Operating Temperature -25 ~ + 75°C Storage Temperature -30 ~ +75°CHumidity10 ~ 90% RH (non-condensing)8-channel 10 V Voltage Attenuator (RoHS)8-channel 80 V Voltage Attenuator (RoHS)8-channel 150 V Voltage Attenuator (RoHS)3-channel 600 V Voltage Attenuator (RoHS)MDR-20-24 CR24 V/1 A, 24 W Power Supply with DIN-Rail Mounting (RoHS)I-7017-G CR 8-channel Analog Input Module (RoHS)I-87017-G CR 8-channel Analog Input Module (RoHS)Selection GuideDN-84-x xx xxx Number of Channels 3: 3 channels 8: 8 channelsV: VoltageI: Channel to channel IsolationInput Voltage RangeDimensions (Units: mm)Bottom View Top View Bottom ViewTop View Left View Front View Rear ViewRight View Left View Front View Rear ViewRight View Speci fi cationsOrdering InformationAccessoriesProfessional Provider of High Quality I ndustrial C omputer P roducts and D ata A cquisition S ystems Vol. PAC 2.0.00102A c c e s s o r i e sDN-843I-CT-20DN-843I-CT-50DN-843I-CT-10DN-843I-CT-1 10.2. Current TransformerThe maximum input range is from ±1 A to +/- 50 A and can be attenuated to from ±1.6 V to ±10 V . The "I" version provide 3000 V DC intra-modules isolation and 3000 V DC channel to channel isolation to avoid the noise interference from inputs to outputs or channel to channel. It can be used with the analog input modules such as I-7017 and I-87017 etc. to measure the high current.AC/DC Source Input Linear Attenuation RatioHigh Current Input MeasurementIsolation InputChannel to Channel Isolation4 kV ESD Protection RoHS ComplianceOperating Temperature: -25 ~ +75°C Easily Wire ConnectionInstallationCh1 Current InputCh2 Current InputCh3 Current Input24 V DCCh1 OutputCh2 OutputCh3 OutputF.G. IntroductionApplicationsProgrammable Automation Controller Products10-2-2Website:E-mail:*******************.PAC2.0.00Accessories102General Channels 3Input Type AC/DC CurrentInput Range +/- 1 A+/- 10 A+/- 20 A+/- 50 AOutput Type AC/DC VoltageOutput Range +/- 1.6 V pp+/- 10 V pp+/- 10 V pp+/- 4 V ppCT Type Solid Core (closed)Accuracy1% of FSR Chanel to Channel IsolationYes, 3000 V rmsIntra-module Isolation, Input to Output 3000 V DC Bandwidth 50 KHz Input Impedance > 1 M ΩEMS Protection ESD (IEC 61000-4-2)+/- 4 kV contact for power line, input and output channels, +/- 8 kV air for random pointPower Input Input Range +10 ~ +24 V DCPower Consumption 1.2 WMechanicalDimensions (W x L x H)148 mm x 83 mm x 39 mmInstallation DIN-Rail Mounting Environment Operating Temperature -25 ~ + 75°C Storage Temperature -30 ~ +75°CHumidity10 ~ 90% RH (non-condensing)3-channel 1 A Current Transformer (RoHS)3-channel 10 A Current Transformer (RoHS)3-channel 20 A Current Transformer (RoHS)3-channel 50 A Current Transformer (RoHS)MDR-20-24 CR24 V/1 A, 24 W Power Supply with DIN-Rail Mounting (RoHS)I-7017-G CR 8-channel Analog Input Module (RoHS)I-87017-G CR8-channel Analog Input Module (RoHS)DN-84--xxxx xC: CurrentCT: Current TransformerInput Current RangeBottom ViewTop ViewLeft ViewFront ViewRight ViewNumber of Channels3: 3 channelsSelection GuideDimensions (Units: mm)Speci fi cationsOrdering InformationAccessoriesI C P roducts and D ata A cquisition S ystems Vol. PAC 2.0.00103A c c e s s o r i e s10.3. Signal Conditioning Modules (SG-3000 Series)DescriptionSG-3016SG-3071SG-3081PicturesAnalog Input Channel 11111Wiring Differential 2/3/4 wiresDifferential Differential Differential Signal ThermocoupleRTDStrain GaugeVoltage Current Type Type J, K, T , E, R, S, B, N, C, L,M, L2Pt100 α=0.00385, Pt100α=0.003916, Ni 120, Pt1000α=0.00385±10 mV , ±20 mV , ±30 mV ,±50 mV , ±100 mV ±5 V ,±10 V 0 ~ 20 mA, 4 ~ 20 mAResolution 12-bit 12-bit ---Accuracy ±0.2% of FSR±0.1% of FSR±0.1% of FSR±0.1% of FSR±0.1% of FSRInput Impedance 1.8 M Ω-- 1.6 M Ω250 ΩExcitation Voltage --0 ~ 10 V--Analog Output Channel 11111Current Output 0 ~ 20 mA 0 ~ 20 mA, 4 ~ 2 0mA 0 ~ 20 mA0 ~ 20 mA, 4 ~ 20 mA0 ~ 20 mA, 4 ~ 20 mA Voltage output 0 ~ 10 V0 ~ 5 V , 0 ~ 10 V±5 V , ±10 V , 0 ~ 5 V , 0 ~ 10 V±5 V , ±10 V0 ~ 5 V , 0 ~ 10 VSystem 3-way Isolation 1000 V DC Power Input 10 ~ 30 V DCPower Consumption 1.44 W1.2 W1.44 W 1.8 W1.61 WOperating Temperature -25 ~ +75°CDimensions (W x H x D)25 mm x 114 mm x 71 mmPW-3090-5SPW-3090-4824S-12PicturesInput 18 ~ 36 V (non-regulated)18 ~ 36 V (non-regulated)18 ~ 36 V (non-regulated)48 V (non-regulated)Output ********(Max.)********(Max.)5 V @ 2 A (Max.)********(Max.)Isolation 1000 V DCEf fi ciency83% Typical Operating Temperature -25 ~ +75°CDimensions (W x H x D)25 mm x 114 mm x 71 mmSG-3000 series signal conditioning modules are used to accept wide range of input signals, such as voltage, current, temperature (thermocouple and RTD) and provide 0 ~ 10 V DC , 0 ~ 20 mA, 4 ~ 20 mA output signals. It gives following good features for industrial applications • 3-way (power/input/output) isolation (1000 V DC )• Wide operating temperature (-25 ~ +75°C)• DIN-Rail mounting• Input and output connectors on the opposite side • Signal range con fi gureable by swtichIntroductionApplicationsProgrammable Automation Controller Products10-4-1Website:E-mail:*******************.PAC2.0.00Accessories104RM-38.61RM-48.61RM-48.62PicturesRelay Finder 20.22.9.024.4000Finder 22.22.9.024.4000Finder 34.51.7.024.0010FINDER - 40.61.7.024.0000FINDER - 44.62.7.024.0000Type Step RelayPower RelayChannel 1ContactForm A (DPST)Form A (DPST)Form C (SPDT)Form C (SPDT)Form C (SPDT)Operating Voltage Range 230 V AC 230 V AC 250 V AC 250 V AC 250 V AC Max. Load Current 16 A 20 A 6 A 16 A 10 A Operate Time 15 ms 15 ms 5 ms 7 ms 7 ms Release Time 8 ms8 ms3 ms 3 ms3 msLED Indicator -MechanicalDimensions (W x L x D)17.5 mm x 84 mm x 62.7 mm 76.5 mm x 6.5 mm x 89 mm75 mm x 15.5 mm x 78.5 mmInstallationDIN-Rail MountingNote1: RM-38.61: 5 pcs in one packageRM-48.61: 4 pcs in one package RM-48.62: 4 pcs in one packageNote2: RM-38-093.20is a 20-way jumper link for RM-38.61DN-SSR4PicturesRelay A5P-204UD3P-054Type Solid-State Relay Channel 4 channels ContactForm A (SPST)Operating Voltage Range 250 V AC /30 V DC50 V DCMax. Load Current 4 AOperate Time 1/2 Cycle + 1ms and below 0.5 ms and below (Resistance load)Release Time 1/2 Cycle + 1ms and below0.5 ms and below (Resistance load)LED Indicator Yes (for Relay status)MechanicalDimensions (W x L x D)101 mm x 77 mm x 66 mmInstallationDIN-Rail MountingPicturesRelay VE-24H5-K FINDER - 40.61.7.024.0000FINDER - 44.52.7.024.0000Type Power Relay Channel 4RM-104: 4 channels RM-108: 8 channels RM-116: 16 channels RM-204: 4 channels RM-208: 8 channels RM-216: 16 channels ContactForm C Form C (SPDT)Form C (DPDT)Operating Voltage Range 250 V AC /30 V DC250 V AC 250 V AC Max. Load Current 5 A 16 A 6 A Operate Time 10 ms (Typical)7 ms (Typical)8 ms (Typical)Release Time 5 ms (Typical)3 ms (Typical) 5 ms (Typical)LED Indicator Yes (for Relay status)MechanicalDimensions (W x L x D)96 mm x 103 mm x 34 mmRM-104: 79 mm x 87 mm x 63 mm RM-108: 135 mm x 87 mm x 63 mm RM-116: 270 mm x 87 mm x 63 mmRM-204: 90 mm x 87 mm x 63 mm RM-208: 169 mm x 87 mm x 63 mm RM-216: 327 mm x 87 mm x 63 mmInstallationDIN-Rail Mounting10.4. Relay ModulesI ndustrial C omputer P roducts and D ata A cquisition S 105A c c e s s o r i e s10.5. Power SuppliesModelsKA-52F DIN-KA52F KA-52F-48DIN-KA52F-48Input Range 100 ~ 250 V AC Frequency 50 ~ 60 HzOutput Power 24 V DC /1.04 A Max., 25 W48 V DC /0.52 A Max., 25 WMechanicalDimensions(W x H x D, Units: mm)54 x 93 x 36 68 x 107 x 50 54 x 93 x 36 68 x 107 x 50 Installation No-mountingDIN-Rail MountingNo-mountingDIN-Rail MountingEnvironmentalOperating Temperature 0 ~ +50°C Storage Temperature-20 ~ +85°CModelsMDR-20-24MDR-60-24MDR-60-48Input Range 100 ~ 250 V AC Frequency 50 ~ 60 HzOutput Power 24 V DC /1 A Max., 24 W24 V DC /2.5 A Max., 60 W48 V DC /1.25 A Max., 60 WMechanicalDimensions (W x H x D)22.5 mm x 90 mm x 100 mm 40 mm x 90 mm x 100 mm 40 mm x 90 mm x 100 mmInstallation DIN-Rail MountingEnvironmental Operating Temperature -20 ~ +70°C Storage Temperature-20 ~ +85°CModelsDP-660DP-1200Input Range 100 ~ 250 V AC Frequency 50 ~ 60 HzOutputPower 24 V DC /2.5 A Max., 60 W and5 V DC /0.5 A Max., 2.5 W24 V DC /5.0 A Max., 120 WMechanicalDimensions (W x H x D)44 mm x 145 mm x 158 mm 65 mm x 111 mm x 125 mmInstallation DIN-Rail MountingEnvironmentalOperating Temperature 0 ~ +50°C -10 ~ +70°C Storage Temperature-20 ~ +85°C-25 ~ +85°CKA-52F CR 24 V DC /1.04 A, 25 W Power Supply (RoHS)DIN-KA52F CR 24 V DC /1.04 A, 25 W Power Supply with DIN-Rail Mounting (RoHS)KA-52F-48 CR 48 V DC /0.52 A, 25 W Power Supply (RoHS)DIN-KA52F-48 CR48 V DC /0.52 A, 25 W Power Supply with DIN-Rail Mounting (RoHS)MDR-20-24 CR 24 V DC /1 A, 24 W Power Supply with DIN-Rail Mounting (RoHS)MDR-60-24 CR 24 V DC /2.5 A, 60 W Power Supply with DIN-Rail Mounting (RoHS)MDR-60-48 CR48 V DC /1.25 A, 60 W Power Supply with DIN-Rail Mounting (RoHS)DP-660 CR 24 V DC /2.5 A, 60 W and 5 V DC /0.5 A, 2.5 W Power Supply with DIN-Rail Mounting (RoHS)DP-1200 CR24 V DC /5.0 A, 120 W Power Supply with DIN-Rail Mounting (RoHS)KA-52F/DIN-KA52F KA52F-48/DIN-KA52F-48MDR-20-24MDR-60-24MDR-60-48DP-660DP-1200KA-52F KA-52F-48MDR-60-24/MDR-60-48DP-1200MDR-20-24DP-660DIN-KA52F DIN-KA52F-48Speci fi cationsSpeci fi cationsSpeci fi cationsOrdering InformationOrdering InformationOrdering InformationProgrammable Automation Controller Products10-6-1Website:E-mail:*******************.PAC2.0.00Accessories106TPM-4100TP-410010.6. Touch Panel MonitorTPM-4100/TP-410010.4" Touch Panel Monitor10.4" LCD supports 800 x 600 resolution Resistive Touch Panel Full-function OSD controlDriver Support: Windows 2k/XP/Vista/7/WESWinCE 5.0/6.0 LED backlight technology Aluminum Casing for TPM-4100 IP65 Comlipant Front PanelWide operating temperature: -25 ~ +75°CTPM-4100TP-4100Display Size 10.4”Resolution 800 x 600Max. Color 16.7 M Brightness (cd/m2)320Contrast Ratio 500 : 1Viewing Angle (H/V)140/130Backlight Life (hrs)50,000Touch Panel 4-wire5-wireanalog resistive, RS-232 or USB1.1 (Type B) interfaceInput SignalVGA (Analog RGB)MMI (Man Machine Interface)OSD Control Functions: Brightness, Contrast, Phase, Horizontal Position,Vertical Position and SharpnessPower Switch YesLED Indicators Power , Display signal is detectedPower Input Range +12 ~ 48 V DCPower Consumption 8.5 WMechanical MaterialAluminumPlasticDimensions (W x L x H)293 mm x 231 mm x 53 mm290 mm x 228 mm x 53 mm Installation Panel MonutingPanel Monuting, VESA (75 × 75) MountingIngress Protection Front panel: IP65Environmental Operating Temperature -25 ~ +75°C Storage Temperature -30 ~ +80°CAmbient Relative Humidity10 ~ 90% RH (non-condensing)10.4" (800 x 600) resistive touch panel monitor with RS-232 or USB interfaceAccessories: Power supply, VGA cable, RS-232 cable, USB cable, Mounting clamps and screws TP-4100 with Aluminum Casing273210.8TPM-4100 Dimensions (Units: mm)Speci fi cationsAppearanceOrdering InformationUSB USBOSD OSDRS-232RS-232VGAVGA Power Switch Power Switch VESA (75 × 75) Mounting12 ~ 48 DC IN12 ~ 48 DC INI ndustrial C omputer P roducts and D ata A cquisition S ystems Vol. PAC 2.0.00106A c c e s s o r i e sTP-30707" Touch Panel Monitor7" LCD supports 800 x 480 resolution Resistive Touch Panel Full-function OSD controlDriver Support: Windows 2k/XP/Vista/7/WESWinCE 5.0/6/0 LED backlight technology IP65 Comlipant Front PanelWide operating temperature: -20 ~ +70°CTP-3070Display Size 7”Resolution 800 x 480Brightness (cd/m2)320Contrast Ratio 500 : 1Viewing Angle (H/V)140/120Backlight Life (hrs)20,000Touch Panel 4-wire, analog resistive, RS-232 or USB1.1 (TypeB) interfaceInput SignalVGA (Analog RGB)MMI (Man Machine Interface)OSD Control Functions: Brightness, Contrast, Clock, Phase, Horizontal Position, Vertical Position and SharpnessPower Switch YesLED Indicators Power , Display signal is detectedPower Input Range +12 ~ 48 V DCPower Consumption 5 WMechanicalDimensions (W x L x H)213 mm x 148 mm x 44 mmCasingPlastic Ingress Protection Front panel: IP65Environmental Operating Temperature -20 ~ +70°C Storage Temperature -30 ~ +80°CAmbient Relative Humidity10 ~ 90% RH (non-condensing)7" (800 x 480) resistive touch panel monitor with RS-232 or USB interfaceAccessories: Power supply, VGA cable, RS-232 cable, USB cable, Mounting clamps and screwsDimensions (Units: mm)Speci fi cationsOrdering InformationProgrammable Automation Controller Products10-7-1Website:E-mail:*******************.PAC2.0.00Accessories 107InterfaceUSBCompatibility: USB 1.1 and 2.0 standards RS-232TxD, RxD, RTS, CTS, DSR, DTR, DCD, RI and GND; non-isolated Baud Rate300 ~ 115200 bps DriverWindows 98/ME/2000/XP/Vista (32/64-bit)/7 (32/64-bit)/LinuxMechanicalDimensions (W x H x D)33 mm x 60 mm x 15 mm Environmental Operating Temperature-25 ~ +75°C Storage Temperature -30 ~ +75°CInterfacePortsUpstream x 1 (Type B); Downstream x 4 (Type A)CompatibilitySpeci fi cation Rev. 2.0/1.1/1.0Transfer Speed480 Mbit/s-high speed mode Input Voltage Range+10 ~ +30 V DCMechanicalDimensions (W x H x D)33 mm x 107 mm x 78 mm InstallationDIN-Rail Mounting Environmental Operating Temperature -0 ~ +70°C Storage Temperature -20 ~ +80°CMechanical Dimensions (W x H x D)481 mm x 132 mm x 125 mm USB-2020 CR USB Audio Device (RoHS)RK-3UD-R 19" Rack Mounting Kit, 3U I-7560 CR USB to RS-232 Converter (RoHS)USB-2560 CR4-port Industrial USB 2.0 Hub (RoHS)USB-2560/S CR 4-port Industrial USB 2.0 Hub (RoHS) with GPSU06U-6 (Power Supply)RK-3UD-R I-7560InterfaceOutput ChannelsMono, Stereo (L + R)Input ChannelsMono, Stereo (L + R)ButtonHID volume up, volume down and Mute Input Voltage Range+10 ~ +30 V DCMechanicalDimensions (W x H x D)33 mm x 107 mm x 78 mm Installation DIN-Rail Mounting Environmental Operating Temperature-25 ~ +75°C Storage Temperature -40 ~ +85°C 10.7. MISC Speci fi cationsSpeci fi cationsSpeci fi cationsSpeci fi cationsOrdering InformationOrdering InformationOrdering Information Ordering Information USB to RS-232 Converter USB-2020USB-2560USB Audio Device 4-Port Industrial USB 2.0 Hub19" Rack Mounting Kit, 3UiP-84112-4-3 iP-88112-4-3 iP-84412-4-3 iP-88412-4-3 iP-8441-FD2-4-3 iP-8841-FD2-4-3 iP-84172-4-5Model Name PageiP-84472-4-5iP-88172-4-5iP-88472-4-5I-87005W5-2-1I-87013W5-2-1I-87015PW5-2-2I-87015W5-2-2I-8014W5-2-3I-8017DW5-2-3I-8017HCW5-2-3I-8017HW5-2-3I-8024DW5-2-3I-8024W5-2-3I-87017DW5-2-4I-87017RCDW5-2-4I-87017RCDW-AI5-2-4I-87017RCW 5-2-4I-87017RW 5-2-4I-87017W5-2-4I-87017W-A55-2-4I-87017ZW5-2-4I-87018PW5-2-5I-87018RW5-2-5I-87018W5-2-5I-87018ZW5-2-5I-87019PW5-2-6I-87019RW5-2-6I-87019ZW5-2-6I-87024W 5-2-7I-87024CW5-2-7I-87024DW 5-2-7I-87024RW 5-2-7I-87024UW 5-2-7I-87028CW5-2-7I-8040PW5-3-1I-8040W5-3-1I-8046W5-3-1I-8048W5-3-1I-8051W5-3-1I-8052W5-3-1I-8053W5-3-1I-8053PW5-3-1Model Name PageI-8058W5-3-1I-87040W5-3-2I-87040PW5-3-2I-87046W5-3-2I-87051W5-3-2I-87052W5-3-2I-87058W5-3-2I-87059W5-3-2I-87053W5-3-3I-87053PW5-3-3I-87053W-A55-3-3I-87053W-AC15-3-3I-87053W-E55-3-3I-8037W5-3-4I-8041W5-3-4I-8041RW5-3-4I-8041AW5-3-4I-8056W5-3-4I-8057W5-3-4I-8057RW5-3-4I-8057PW5-3-4I-8060W5-3-4I-8064W5-3-4I-8068W5-3-4I-8069RW5-3-4I-8069W5-3-4I-87037W5-3-5I-87041W 5-3-5I-87057W5-3-5I-87057PW5-3-5I-87061W5-3-5I-87064W5-3-5I-87065W5-3-5I-87066W5-3-5I-87068W5-3-5I-87069W5-3-5I-87069PW5-3-5I-8042W5-3-6I-8050W5-3-6I-8054W5-3-6I-8054RW5-3-6I-8055W5-3-6Model Name PageI-8063W5-3-6I-87042W5-3-7I-87054W5-3-7I-87055W5-3-7I-87063W5-3-7I-8026PW5-4-1I-87016W5-4-1I-87026PW5-4-1I-87089W/S5-5-1I-8084W5-6-1I-8088W5-6-1I-87082W5-6-1I-87084W5-6-1I-87088W5-6-1I-8092F5-7-1I-8093W5-7-1I-80945-7-1I-8094A5-7-1I-8094F5-7-1I-8094H5-7-1I-75105-8-1I-7510A5-8-1I-7510AR5-8-1I-75135-8-1I-7514U5-8-1I-7520 5-8-1I-7520A5-8-1I-7520AR5-8-1I-7520R5-8-1I-7520U45-8-1I-75515-8-1I-8112iW5-8-1I-8114iW5-8-1I-8114W5-8-1I-8142iW5-8-1I-8144iW5-8-1I-25325-9-2I-25335-9-2I-75305-9-2I-7530A5-9-2I-7530A-MR5-9-2I-7530-FT5-9-2Model IndexI-75315-9-2 I-75325-9-2 I-7540D5-9-2 I-7540D-MTCP5-9-2 I-7540D-WF5-9-2 I-75655-9-2I-7565-H15-9-2 I-7565-H25-9-2 I-8120W5-9-2 I-8123W5-9-2 I-8124W5-9-2 I-871235-9-2 I-871245-9-2 I-87H17W5-10-1 I-87H24W5-10-1 I-75475-10-1 I-75675-10-1 I-75705-10-1 I-8172W5-11-1 I-8212W5-12-1 I-8212W-3GWA5-12-1 I-8213W5-12-1 I-8213W-3GWA5-12-1 I-87211W 5-12-1 iP-8441-MTCP6-3-2 iP-8841-MTCP6-3-2 I-7188XG7-1-6 I-7188XGD7-1-6 I-71887-1-9 I-7188D7-1-9 I-7188XA7-1-9 I-7188XAD7-1-9 I-7188XB7-1-9 I-7188XBD7-1-9 I-7188XC7-1-9 I-7188XCD7-1-9 I-7188EA7-1-11 I-7188EAD7-1-11 I-7188EX7-1-11 I-7188EXD7-1-11 I-756010-7-1 iDCS-88309-1-3USB-87P25-4-2USB-87P45-4-2USB-87P85-4-2USB-202010-7-1USB-256010-7-1WP-8131 2-2-3WP-84312-2-3WP-88312-2-3WP-81412-2-3WP-84412-2-3WP-88412-2-3WP-80512-2-3WP-83512-2-3WP-87512-2-3WP-81372-2-6WP-84372-2-6WP-88372-2-6WP-81472-2-6WP-84472-2-6WP-88472-2-6WP-80572-2-6WP-83572-2-6WP-87572-2-6WP-81392-2-11WP-84392-2-11WP-88392-2-11PROFI-82556-6-2PROFI-84556-6-2PROFI-88556-6-2PW-3090-5S10-3-1PW-3090-12S10-3-1PW-3090-24S10-3-1PW-3090-4824S-1210-3-1USB-87P15-4-2iDCS-8830R9-1-3PROFI-81556-6-2XP-8349-Atom-CE62-1-14 XP-8749-CE62-1-14 XP-8749-Atom-CE62-1-14 X1017-2-3 X1067-2-3 X1077-2-3 X1107-2-3 X1117-2-3 X2007-2-3 X2027-2-3 X2037-2-3 X3027-2-3 X3037-2-3 X3047-2-3 X3057-2-3 X3087-2-3 X3107-2-3 X3247-2-3 X5037-2-3 X5047-2-3 X5057-2-3 X5067-2-3 X5077-2-3 X5087-2-3 X5097-2-3 X5107-2-3 X510-1287-2-3 X5117-2-3 X5187-2-3 X6037-2-3 X6077-2-3 X6087-2-3 X7027-2-3 X7037-2-3 XV1168-4-1 XV107Ai8-4-2 XV107i8-4-2 XV110i8-4-2 XV111Ai8-4-2 XV111i8-4-2 XW1078-4-2 XW107i8-4-2μPAC-51078-1-7μPAC-5107D8-1-7μPAC-52078-1-7μPAC-5207D8-1-7μPAC-53078-1-7μPAC-5307D8-1-7μPAC-55078-1-7μPAC-5507D8-1-7 XW110i8-4-2XV304i8-4-3XV305i8-4-3XV308i8-4-3XV310i8-4-3XW3048-4-4XW3108-4-4XW310C8-4-4XW5068-4-5XW5078-4-5XW5088-4-5XW5098-4-5XW511i8-4-5XW5148-4-5μμPAC-7186EX 7-1-4μPAC-7186EXD 7-1-4μPAC-7186EX-FD 7-1-4μPAC-7186EXD-FD 7-1-4μPAC-7186EX-SM 7-1-4μPAC-7186EXD-SM 7-1-4μPAC-7186EG7-1-6μPAC-7186EG-D7-1-6μPAC-50018-1-6μPAC-5001D8-1-6μPAC-5001-FD8-1-6μPAC-5001D-FD8-1-6μPAC-5101 8-1-6μPAC-5101D 8-1-6μPAC-52018-1-6μPAC-5201D8-1-6μPAC-53018-1-6μPAC-5301D8-1-6μPAC-55018-1-6μPAC-5501D8-1-6μPAC-5801 8-1-6μPAC-5801D8-1-6μPAC-59018-1-6μPAC-5901D8-1-6μPAC-50078-1-7μPAC-5007D8-1-7WP-81492-2-11WP-84492-2-11WP-88492-2-11WP-80592-2-11WP-83592-2-11WP-87592-2-11WP-51418-2-4WP-5141-OD8-2-4WP-52318-2-6WP-5231-2G8-2-6WP-5231-3G8-2-6WP-5231-GPS8-2-6WP-5231-WF8-2-6WP-5231-ZH8-2-6WP-5231-ZS8-2-6WP-51478-2-8WP-5147-OD8-2-8WP-51498-2-11WP-5149-OD8-2-11XXP-8041 2-1-5XP-8141-Atom2-1-5XP-83412-1-5XP-8341-Atom2-1-5XP-87412-1-5XP-8741-Atom2-1-5XP-8041-CE62-1-7XP-8141-Atom-CE62-1-7XP-8341-CE62-1-7XP-8341-Atom-CE62-1-7XP-8741-CE62-1-7XP-8741-Atom-CE62-1-7XP-8047-CE62-1-9XP-8147-Atom-CE62-1-9XP-8347-CE62-1-9XP-8347-Atom-CE62-1-9XP-8747-CE62-1-9XP-8747-Atom-CE62-1-9XP-8049-CE62-1-14XP-8149-Atom-CE62-1-14XP-8349-CE62-1-14 Model Index。
![舵机参数[资料]](https://uimg.taocdn.com/2c0e9709fd4ffe4733687e21af45b307e871f92a.webp)
舵机参数准备装ESM的3A机机了。
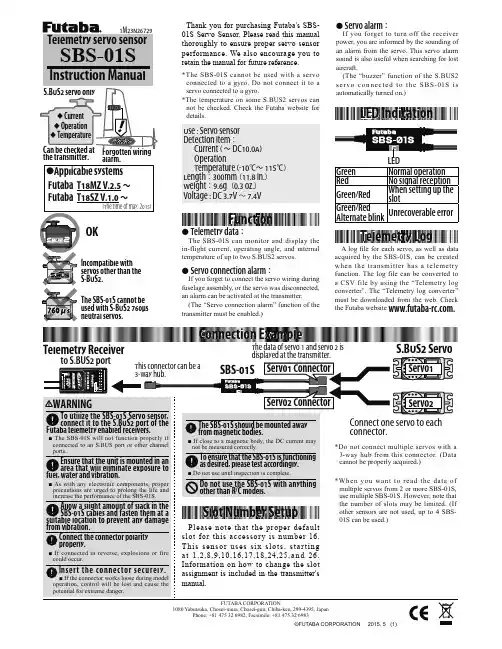
选舵机时发现了这几张表,转贴过来,供大家参考FUTABA舵机参数大全型号特点/用途说明速度扭力s135 小型化模型使用/小型车 0.15秒/60 度 1.9kg.cms135c 电车适用/小型车 0.15秒/60度 1.9kg.cms136G 薄型/收轮架专用 /小型,一般飞机 0.50秒/60度 5.5kg.cms3001 一般模型适用 0.22秒/60度 3.0kg.cms3002 高扭力/金属齿 /飞机,滑翔机 0.20秒/60度 3.3kg.cms3003 一般车、飞、机滑翔机、船 0.23\0.19(4.8v,6.0v)/60度3.2/4.1s3050 数位式/薄/吕齿 /镍镉电/车用 0.16秒/60度 6.5kg.cms3101 超小型/小型化模型适用 0.18秒/60度 2.5kg.cms3102 超小型/金属齿 /小型飞行类 0.25秒/60度 3.7kg.cms3103 超小型/电动飞机适用 0.11秒/60度 1.2kg.cms3108 超小型 0.12秒/60度 1.2kg.cms3150 超小型/数位式 0.24秒/60度 3.7kg.cms3151 一般模型适用/数位式 0.21秒/60度 3.1kg.cms3302 大型/金属齿/一般飞机、船/引擎车特适 0.19秒/60度8.0kg.cms3401 一般车用 0.15秒/60度 3.2kg.cms3801 高扭力/金属齿 /引擎车、飞机/帆船特适 0.26秒/60度14kg.cms3802 高扭力/金属齿 /帆船专用 0.56秒/60度 11kg.cms5050 数位式/高扭力 /金属齿/引擎车、飞机、船 0.20秒/60度19kg.cms5301 大型/高扭力/金属齿/镍镉电/大型模型 0.23秒/60度21kg.cms5801 大型/高扭力/金属齿/回旋式/帆船特适 0.50秒/60度9.8kg.cms9001 一般模型适用 0.22、0.18秒/60度 3.9、5.2kg.cms9101 一般飞行类/滑翔机、飞机特适 0.16秒/60度 3.1kg.cms9102 薄型/超快/飞机副翼专用/飞机特适 0.13秒/60度 3.6kg.cm s9150 薄型4.8v/镍镉电/飞机副翼专用 0.18秒/60度 5.8kg.cms9151 数位式/高扭力 /4.8v/镍镉电/飞机特适 0.19秒/60度9.5kg.cms9152 数位式/高扭力 /大型飞机特适 0.19秒/60度 20kg.cms9153 数位式/大型飞机特适 0.15秒/60度 15kg.cms9154 数位式/薄型/超快/飞机副翼专用 0.14秒/60度 4.6kg.cms9202 高扭力/铝齿/一般飞机、船/直升机特适 0.22秒/60度5.0kg.cms9203 超快/铝齿/镍镉电/飞机直升机特适 0.11秒/60度 5.5kg.cms9206 高扭力/铝齿 /4.8v/镍镉电/飞机直机特适 0.19秒/60度9.5kg.cms9250 数位式/高扭力 /吕齿/镍镉电/4.8v/飞直机特适 0.19秒/60 度 9.5kg.cms9251 数位式/4.8v /GY601陀螺仪专用 0.07秒/60度 3.7kg.cms9252 数位式/4.8v /飞机适用/直机特适 0.14秒/60度 6.6kg.cms9254 数位式/4.8v /GY240、401、502陀螺仪用 0.06秒/60 度4.8kg.cms9255 数位式/高扭力 /铝齿/镍镉电/4.8v/3C、3D直机特适0.16秒/60 度 9.0kg.cms9350 数位式/铝齿/镍镉电/吕中段外壳/车、船特适 0.12秒/60度10kg.cms9351 数位式/铝齿/镍镉电/铝中段外壳1/8引擎车特适 0.13秒/60度 13.8kg.cms9402 高扭力/铝齿/镍镉电/车、船特适 0.10秒/60度 8.0kg.cms9405 高扭力/铝齿/镍镉电/车、船特适 0.11秒/60度 7.2kg.cms9451 数位式/铝齿/镍镉电/车、船特适 0.10秒/60度 8.7kg.cms9550 数位式/薄型/铝齿/镍镉电/电车专用 0.11秒/60度6.0kg.cms9601 小型/小型化飞行类/电车特适 0.16秒/60度 2.4kg.cms9602 铝齿/电车专用 0.09秒/60度 2.7kg.cms9650 数位式/1/12 电车专用 0.14/60度3.6、4.5kg.cmMS-1 超小型/小型飞机用 0.12秒/60度 1.2kg.cmJR 舵机参数常用资料:JR舵机参数大全型号长*宽*高mm 扭力kg/cm 速度sec/60度总量g 构造NES-341 28.5*13*30 2.3 0.24 18 4.8V 电动飞机、直升机NES-351 28.5*13*30 2.3 0.24 25 1 Y 4.8VNES-321 33*15*26 2.3 0.23 22 2 4.8V 小型飞机、直升机NES-3021 33*15*26 3 0.22 26 2 4.8VNES-3025 33*15*26 2.1 0.15 26 2 4.8V 电动车NES-3321 33*15*33 4.3 0.36 27 4.8V 滑翔机NES-507 39*19*33.5 3.1 0.27 43 1 4.8V 一般用NES-511 39*19*33.5 3.5 0.26 45 1 4.8VNES-513 39*19*33.5 4.8 1.15 45 2 4.8V 飞机(收放起落架用) NES-911 36*19*26.5 3 0.24 32 2 4.8V 飞机、一般模型NES-9011 36*19*26.5 3.9 0.21 37 2 4.8VNES-2235 39*19*33 5 0.19 47 2 4.8V 竞赛飞机NES-4231 39*19*33 6 0.22 47 2 4.8V 竞赛直升机NES-4135 39*19*33 5.3 0.19 48 2 4.8V 电动越野车NES-4721 39*19*33 8.6 0.22 49 2 4.8V 高扭力NES-4735 39*19*33 6.5 0.15 49 2 4.8V 油动车NES-703 44*22.5*23.5 6.7 1.36 35 2 4.8V 收放起落架(薄型)NES-7005 44*22.5*23.5 4.5 0.19 38 2 4.8V 副翼(薄型)NES-605 63.5*32*53.5 10 0.28 145 2 4.8V 大型机NES-2700G 39*19*33 3.5 0.11 56 2 4.8V 搭配压电式陀螺仪NES-2000 39*19*33 5.3 0.19 51 2 4.8V 飞机NES-4000 39*19*33 5.3 0.19 51 2 Y 4.8V 直升机NES-7000 44*22.5*26 4.5 0.19 43 2 4.8V 副翼NES-7100 44*22.5*26 3.5 0.15 46 2 Y 4.8V 副翼-高速Hitec 舵机的参数表型号速度扭力电压/类型HS-5475HB 0.18s 5.5Kg/cm 6V/DigitalHS-5245MG 0.13s 3.5Kg/cm 6V/DigitalHS-5625MG 0.14s 9.4Kg/cm 6V/DigitalHS-5645MG 0.18s 12.1Kg/cm 6V/DigitalHS-5929MG 0.08s 9.2Kg/cm 6V/DigitalHS-5949MG 0.13s 13.0Kg/cm 6V/DigitalHS-475MG 0.18s 5.5Kg/cm 6V/AnalogHS-225MG 0.11s 4.8Kg/cm 6V/AnalogHS-325BB 0.15s 3.7Kg/cm 6V/AnalogHS-645MG 0.20s 9.6Kg/cm 6V/AnalogHS-425BB 0.16s 4.1Kg/cm 6V/AnalogSanwa 舵机的参数表ERG-VR 0.07s 8.0Kg/cm 6V/Digital/金属ERG-VB 0.10s 13.0Kg/cm 6V/Digital/金属ERG-VX 0.10s 13.0Kg/cm 6V/Digital/金属ERG-VRX 0.07s 8.0Kg/cm 6V/Digital/金属ERG-WRX 0.06s 8.1Kg/cm 6V/Digital/金属SX-101Z 0.18s 3.3Kg/cm 6V/Analog/塑料SX-112 0.14s 4.0Kg/cm 6V/Analog/塑料SDX-755 0.11s 5.8Kg/cm 6V/Digital/金属SRM-141HRZ 0.07s 2.3Kg/cm 6V/Digital/金属。
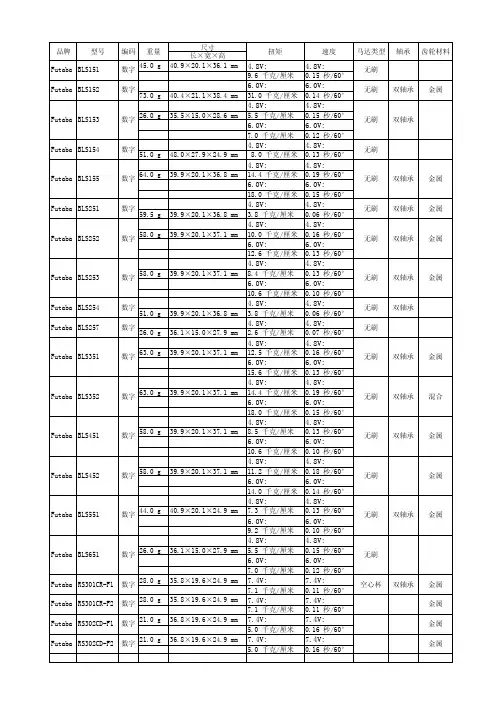
45.0 g40.9×20.1×36.1 mm4.8V:4.8V:9.6 千克/厘米0.15 秒/60°6.0V:6.0V:73.0 g 40.4×21.1×38.4 mm 31.0 千克/厘米0.14 秒/60°4.8V:4.8V:26.0 g35.5×15.0×28.6 mm5.5 千克/厘米0.15 秒/60°6.0V:6.0V:7.0 千克/厘米0.12 秒/60°4.8V:4.8V:51.0 g 48.0×27.9×24.9 mm 8.0 千克/厘米0.13 秒/60°4.8V:4.8V:64.0 g39.9×20.1×36.8 mm14.4 千克/厘米0.19 秒/60°6.0V:6.0V:18.0 千克/厘米0.15 秒/60°4.8V:4.8V:59.5 g 39.9×20.1×36.8 mm 3.8 千克/厘米0.06 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm10.0 千克/厘米0.16 秒/60°6.0V:6.0V:12.6 千克/厘米0.13 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm8.4 千克/厘米0.13 秒/60°6.0V:6.0V:10.6 千克/厘米0.10 秒/60°4.8V:4.8V:51.0 g 39.9×20.1×36.8 mm 3.8 千克/厘米0.06 秒/60°4.8V:4.8V:26.0 g 36.1×15.0×27.9 mm 2.6 千克/厘米0.07 秒/60°4.8V:4.8V:63.0 g39.9×20.1×37.1 mm12.5 千克/厘米0.16 秒/60°6.0V:6.0V:15.6 千克/厘米0.13 秒/60°4.8V:4.8V:63.0 g39.9×20.1×37.1 mm14.4 千克/厘米0.19 秒/60°6.0V:6.0V:18.0 千克/厘米0.15 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm8.5 千克/厘米0.13 秒/60°6.0V:6.0V:10.6 千克/厘米0.10 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm11.2 千克/厘米0.18 秒/60°6.0V:6.0V:14.0 千克/厘米0.14 秒/60°4.8V:4.8V:44.0 g40.9×20.1×24.9 mm7.3 千克/厘米0.13 秒/60°6.0V:6.0V:9.2 千克/厘米0.10 秒/60°4.8V:4.8V:26.0 g36.1×15.0×27.9 mm5.5 千克/厘米0.15 秒/60°6.0V:6.0V:7.0 千克/厘米0.12 秒/60°28.0 g 35.8×19.6×24.9 mm 7.4V:7.4V:7.1 千克/厘米0.11 秒/60°28.0 g 35.8×19.6×24.9 mm 7.4V:7.4V:7.1 千克/厘米0.11 秒/60°21.0 g 36.8×19.6×24.9 mm 7.4V:7.4V:5.0 千克/厘米0.16 秒/60°21.0 g36.8×19.6×24.9 mm7.4V:7.4V:5.0 千克/厘米0.16 秒/60°Futaba BLS151数字无刷双轴承金属Futaba BLS152数字无刷双轴承Futaba BLS153数字无刷Futaba BLS154数字无刷双轴承金属Futaba BLS155数字无刷双轴承金属Futaba BLS251数字无刷双轴承金属Futaba BLS252数字无刷双轴承金属Futaba BLS253数字无刷双轴承Futaba BLS254数字无刷Futaba BLS257数字无刷双轴承金属Futaba BLS351数字无刷双轴承混合Futaba BLS352数字无刷双轴承金属Futaba BLS451数字无刷金属Futaba BLS452数字无刷双轴承金属Futaba BLS551数字无刷Futaba BLS651数字无刷双轴承金属Futaba RS301CR-F1数字空心杯金属Futaba RS301CR-F2数字金属Futaba RS302CD-F1数字金属Futaba RS302CD-F2数字63.0 g39.9×20.1×37.6 mm 6.0V: 6.0V:14.1 千克/厘米0.13 秒/60°47.5 g39.9×20.1×39.1 mm 6.0V: 6.0V:8.9 千克/厘米0.20 秒/60°6.2 g22.9×10.2×20.3 mm 4.8V: 4.8V:1.6 千克/厘米0.10 秒/60°65.2 g39.6×22.4×42.9 mm 4.8V: 6.0V:9.3 千克/厘米0.62 秒/60°4.8V: 4.8V:42.0 g46.0×23.1×24.9 mm 4.3 千克/厘米0.60 秒/60°6.0V: 6.0V:5.5 千克/厘米0.50 秒/60°4.8V: 4.8V:44.4 g39.9×20.1×36.1 mm 2.4 千克/厘米0.28 秒/60°6.0V: 6.0V:3.0 千克/厘米0.22 秒/60°4.8V: 4.8V:45.0 g39.9×20.1×36.1 mm 2.4 千克/厘米0.28 秒/60°6.0V: 6.0V:3.0 千克/厘米0.22 秒/60°4.8V: 4.8V:35.0 g31.0×16.0×30.0 mm 2.7 千克/厘米0.25 秒/60°6.0V: 6.0V:3.3 千克/厘米0.20 秒/60°4.8V: 4.8V:37.0 g39.9×20.1×36.1 mm 3.2 千克/厘米0.23 秒/60°6.0V: 6.0V:4.1 千克/厘米0.19 秒/60°4.8V: 4.8V:37.0 g39.9×20.1×36.1 mm 3.2 千克/厘米0.23 秒/60°6.0V: 6.0V:4.1 千克/厘米0.19 秒/60°4.8V: 4.8V:41.0 g39.9×20.1×38.1 mm 5.2 千克/厘米0.20 秒/60°6.0V: 6.0V:6.5 千克/厘米0.16 秒/60°41.1 g39.9×20.1×38.1 mm 6.0V: 6.0V:6.5 千克/厘米0.16 秒/60°4.8V: 4.8V:49.0 g39.9×20.1×38.1 mm 5.2 千克/厘米0.20 秒/60°6.0V: 6.0V:6.5 千克/厘米0.16 秒/60°Futaba S30514.8V: 4.8V:17.0 g26.7×12.7×28.4 mm 2.5 千克/厘米0.18 秒/60°6.0V: 6.0V:3.1 千克/厘米0.14 秒/60°4.8V: 4.8V:21.0 g27.9×13.0×30.0 mm 3.7 千克/厘米0.25 秒/60°6.0V: 6.0V:4.6 千克/厘米0.20 秒/60°4.8V: 4.8V:9.6 g21.8×10.9×19.8 mm 1.3 千克/厘米0.11 秒/60°6.0V: 6.0V:1.5 千克/厘米0.09 秒/60°4.8V: 4.8V:95.0 g58.9×29.0×50.0 mm9.2 千克/厘米0.21 秒/60°双轴承金属Futaba RS403PR数字空心杯金属Futaba RS404PD数字3-poleFutaba S110M模拟单轴承塑料Futaba S125模拟双轴承塑料Futaba S136G模拟3-pole衬套塑料Futaba S148模拟3-pole单轴承塑料Futaba S3001模拟3-pole双轴承金属Futaba S3002模拟3-pole塑料Futaba S3003模拟双轴承塑料Futaba S3004模拟3-pole单轴承塑料Futaba S3010模拟3-poleFutaba S3014金属Futaba S3050数字Futaba S31015-pole衬套混合Futaba S3102模拟3-pole金属Futaba S31033-pole衬套塑料Futaba S3104模拟3-pole9.6 g21.6×10.9×19.8 mm 1.3 千克/厘米0.11 秒/60°6.0V: 6.0V:1.5 千克/厘米0.09 秒/60°9.0 g22.1×10.9×20.1 mm 4.8V: 4.8V:1.2 千克/厘米0.12 秒/60°7.7 g20.6×11.4×22.1 mm 4.8V: 4.8V:1.2 千克/厘米0.12 秒/60°7.3 g22.9×10.2×20.3 mm 4.8V: 4.8V:1.2 千克/厘米0.12 秒/60°4.8V:0.14 秒/60°6.5 g22.9×10.2×20.3 mm 4.8V: 4.8V:0.5 千克/厘米0.14 秒/60°7.3 g21.8×10.9×19.8 mm 4.8V: 4.8V:1.6 千克/厘米0.10 秒/60°6.3 g22.1×10.9×20.1 mm 4.8V: 4.8V:0.6 千克/厘米0.12 秒/60°4.8V: 4.8V:6.3 g22.1×10.9×20.1 mm0.6 千克/厘米0.12 秒/60°4.8V: 4.8V:9.6 g21.8×10.9×20.3 mm 1.2 千克/厘米0.11 秒/60°6.0V: 6.0V:1.5 千克/厘米0.10 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×20.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×20.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°17.0 g27.9×13.0×30.0 mm 4.8V: 4.8V:2.8 千克/厘米0.15 秒/60°4.8V: 4.8V:8.5 g22.1×10.9×23.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°23.0 g30.0×10.9×29.0 mm 4.8V: 4.8V:3.7 千克/厘米0.24 秒/60°4.8V: 4.8V:42.0 g40.9×20.1×36.1 mm 3.1 千克/厘米0.21 秒/60°6.0V: 6.0V:3.9 千克/厘米0.17 秒/60°4.8V: 4.8V:41.0 g39.9×20.1×38.1 mm 5.0 千克/厘米0.22 秒/60°6.0V: 6.0V:6.3 千克/厘米0.18 秒/60°4.8V: 4.8V:9.6 g22.1×10.9×20.1 mm 1.4 千克/厘米0.11 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:9.6 g22.1×10.9×20.1 mm 1.4 千克/厘米0.13 秒/60°6.0V: 6.0V:1.7 千克/厘米0.11 秒/60°4.8V: 4.8V:7.9 g22.1×10.9×20.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°塑料Futaba S31063-pole塑料Futaba S3107模拟3-poleFutaba S3108Futaba S3108M3-poleFutaba S3109Futaba S3109MFutaba S3110模拟塑料Futaba S3111模拟塑料Futaba S3111M模拟塑料Futaba S3113模拟衬套塑料Futaba S3114模拟3-pole衬套塑料Futaba S3114M模拟3-pole塑料Futaba S3115模拟塑料Futaba S3117模拟双轴承金属Futaba S3150数字空心杯单轴承塑料Futaba S3151数字3-pole单轴承塑料Futaba S3152数字空心杯塑料Futaba S3153数字金属Futaba S3153MG数字塑料Futaba S3154数字20.0 g30.0×10.9×29.0 mm 2.0 千克/厘米0.16 秒/60°6.0V:0.13 秒/60°4.8V: 4.8V:9.3 g22.1×10.9×22.1 mm 2.0 千克/厘米0.13 秒/60°6.0V: 6.0V:2.4 千克/厘米0.11 秒/60°4.8V: 4.8V:8.3 g22.1×10.9×23.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×23.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:26.0 g35.1×16.0×25.9 mm 6.8 千克/厘米0.57 秒/60°6.0V: 6.0V:8.5 千克/厘米0.47 秒/60°4.8V: 4.8V:103.0 g58.9×29.0×50.0 mm 6.4 千克/厘米0.24 秒/60°6.0V: 6.0V:8.0 千克/厘米0.19 秒/60°4.8V: 4.8V:19.9 g30.0×9.9×29.0 mm 2.2 千克/厘米0.15 秒/60°4.8V: 4.8V:47.0 g39.9×20.1×38.1 mm7.1 千克/厘米0.25 秒/60°6.0V: 6.0V:8.9 千克/厘米0.20 秒/60°4.8V: 4.8V:126.0 g66.0×30.0×56.9 mm19.2 千克/厘米0.20 秒/60°6.0V: 6.0V:24.0 千克/厘米0.16 秒/60°4.8V: 4.8V:47.1 g40.6×20.1×37.3 mm 2.6 千克/厘米0.19 秒/60°6.0V: 6.0V:3.2 千克/厘米0.15 秒/60°4.8V: 4.8V:107.0 g58.9×29.0×50.0 mm11.2 千克/厘米0.30 秒/60°6.0V: 6.0V:14.0 千克/厘米0.26 秒/60°4.8V: 4.8V:72.0 g43.9×23.1×42.9 mm8.8 千克/厘米0.70 秒/60°6.0V: 6.0V:11.0 千克/厘米0.56 秒/60°4.8V: 4.8V:127.0 g58.9×29.0×50.0 mm15.2 千克/厘米0.25 秒/60°6.0V: 6.0V:19.0 千克/厘米0.20 秒/60°4.8V: 4.8V:125.0 g58.9×29.0×50.0 mm16.8 千克/厘米0.29 秒/60°6.0V: 6.0V:21.0 千克/厘米0.23 秒/60°4.8V: 4.8V:125.0 g58.9×29.0×50.0 mm13.6 千克/厘米0.19 秒/60°6.0V: 6.0V:17.0 千克/厘米0.15 秒/60°金属Futaba S3155数字金属Futaba S3156MG数字Futaba S3157数字Futaba S3157M数字双轴承金属Futaba S3170G数字双轴承混合Futaba S3302模拟3-poleFutaba S3303数字双轴承金属Futaba S3305模拟3-pole双轴承塑料Futaba S3306模拟3-pole金属Futaba S34015-pole双轴承混合Futaba S3801模拟3-pole双轴承混合Futaba S3802模拟3-pole双轴承金属Futaba S5050数字5-pole双轴承金属Futaba S5301模拟5-pole双轴承金属Futaba S5302模拟5-pole83.0 g46.0×24.9×43.9 mm7.8 千克/厘米0.10 秒/60°7.2V:7.2V:9.8 千克/厘米0.08 秒/60°4.8V: 4.8V:48.0 g39.9×20.1×36.1 mm 3.9 千克/厘米0.22 秒/60°6.0V: 6.0V:5.2 千克/厘米0.18 秒/60°4.8V: 4.8V:31.0 g31.0×16.0×31.0 mm 2.5 千克/厘米0.18 秒/60°6.0V: 6.0V:3.1 千克/厘米0.14 秒/60°4.8V: 4.8V:32.0 g35.8×19.6×24.9 mm 4.5 千克/厘米0.18 秒/60°6.0V: 6.0V:5.5 千克/厘米0.15 秒/60°7.2V:7.2V:6.8 千克/厘米0.12 秒/60°4.8V: 4.8V:42.5 g38.6×20.3×34.5 mm 2.5 千克/厘米0.20 秒/60°6.0V: 6.0V:3.1 千克/厘米0.16 秒/60°4.8V: 4.8V:48.0 g39.9×20.1×36.1 mm 2.9 千克/厘米0.16 秒/60°6.0V: 6.0V:3.6 千克/厘米0.13 秒/60°53.0 g48.0×26.9×24.9 mm 4.8V: 4.8V:5.8 千克/厘米0.18 秒/60°50.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:9.5 千克/厘米0.19 秒/60°4.8V: 4.8V:85.0 g49.0×24.9×39.9 mm16.0 千克/厘米0.23 秒/60°6.0V: 6.0V:20.0 千克/厘米0.19 秒/60°4.8V: 4.8V:85.0 g49.0×24.9×39.9 mm12.0 千克/厘米0.19 秒/60°6.0V: 6.0V:15.0 千克/厘米0.15 秒/60°53.0 g48.0×26.9×24.9 mm 4.8V: 4.8V:4.6 千克/厘米0.14 秒/60°4.8V: 4.8V:61.0 g39.9×20.1×37.1 mm11.0 千克/厘米0.16 秒/60°6.0V: 6.0V:13.8 千克/厘米0.13 秒/60°4.8V: 4.8V:63.0 g39.9×20.1×37.1 mm19.6 千克/厘米0.21 秒/60°6.0V: 6.0V:24.5 千克/厘米0.17 秒/60°71.0 g40.9×21.1×37.1 mm 6.0V: 6.0V:30.6 千克/厘米0.14 秒/60°48.2 g40.4×20.1×35.6 mm 6.0V: 6.0V:5.0 千克/厘米0.22 秒/60°4.8V: 4.8V:53.0 g40.9×20.1×38.1 mm 4.0 千克/厘米0.27 秒/60°6.0V: 6.0V:5.0 千克/厘米0.22 秒/60°53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V:5.5 千克/厘米0.11 秒/60°53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V:9.5 千克/厘米0.19 秒/60°双轴承金属Futaba S5801模拟5-pole单轴承塑料Futaba S9001模拟空心杯双轴承混合Futaba S9002模拟空心杯双轴承金属Futaba S9070数字无刷Futaba S9101空心杯双轴承塑料Futaba S9102模拟空心杯双轴承塑料Futaba S9150数字空心杯双轴承塑料Futaba S9151数字空心杯双轴承金属Futaba S9152数字空心杯双轴承金属Futaba S9153数字空心杯塑料Futaba S9154数字空心杯金属Futaba S9155数字空心杯双轴承金属Futaba S9156数字空心杯双轴承金属Futaba S9157数字空心杯Futaba S9201模拟双轴承塑料Futaba S9202模拟空心杯双轴承Futaba S9203模拟空心杯双轴承金属Futaba S9204模拟空心杯53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V:5.5 千克/厘米0.11 秒/60°53.0 g40.9×20.1×38.1 mm 4.8V: 4.8V:9.5 千克/厘米0.19 秒/60°54.0 g40.9×20.1×38.1 mm 4.8V: 4.8V:5.5 千克/厘米0.11 秒/60°57.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:3.7 千克/厘米0.07 秒/60°50.0 g39.9×20.1×37.1 mm4.8V: 4.8V:6.6 千克/厘米0.14 秒/60°49.3 g38.1×19.1×35.6 mm 4.8V: 4.8V:2.0 千克/厘米0.08 秒/60°49.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:3.4 千克/厘米0.06 秒/60°55.0 g39.9×20.1×37.1 mm4.8V: 4.8V:9.0 千克/厘米0.16 秒/60°4.8V: 4.8V:57.0 g39.9×20.1×37.1 mm 3.4 千克/厘米0.06 秒/60°26.0 g36.1×15.0×29.0 mm 4.8V: 4.8V:2.0 千克/厘米0.08 秒/60°65.2 g40.4×20.1×39.4 mm 4.8V: 4.8V:7.1 千克/厘米0.19 秒/60°51.0 g40.4×20.1×35.6 mm 4.8V: 4.8V:4.1 千克/厘米0.28 秒/60°6.0V: 6.0V:5.0 千克/厘米0.22 秒/60°61.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:8.0 千克/厘米0.15 秒/60°6.0V: 6.0V:10.0 千克/厘米0.12 秒/60°4.8V: 4.8V:61.0 g39.9×20.1×37.1 mm11.0 千克/厘米0.16 秒/60°6.0V: 6.0V:13.8 千克/厘米0.13 秒/60°4.8V: 4.8V:55.0 g40.9×20.1×38.1 mm 6.4 千克/厘米0.12 秒/60°6.0V: 6.0V:8.0 千克/厘米0.10 秒/60°48.2 g40.4×20.1×35.6 mm 4.8V: 4.8V:3.2 千克/厘米0.16 秒/60°55.0 g39.1×20.1×37.3 mm4.8V: 4.8V:5.7 千克/厘米0.11 秒/60°4.8V: 4.8V:55.0 g40.9×20.1×38.1 mm 5.8 千克/厘米0.13 秒/60°6.0V: 6.0V:7.2 千克/厘米0.11 秒/60°4.8V: 4.8V:55.0 g40.4×20.1×37.6 mm 6.4 千克/厘米0.10 秒/60°6.0V: 6.0V:8.0 千克/厘米0.08 秒/60°4.8V: 4.8V:56.0 g40.0×20.0×36.0 mm7.0 千克/厘米0.13 秒/60°6.0V: 6.0V:8.0 千克/厘米0.10 秒/60°4.8V: 4.8V:50.0 g39.9×20.1×34.0 mm7.3 千克/厘米0.13 秒/60°6.0V: 6.0V:9.2 千克/厘米0.11 秒/60°金属Futaba S9205双轴承金属Futaba S9206模拟空心杯双轴承金属Futaba S9250数字空心杯双轴承金属Futaba S9251数字空心杯双轴承塑料Futaba S9252数字空心杯双轴承塑料Futaba S9253数字空心杯双轴承塑料Futaba S9254数字空心杯单轴承金属Futaba S9255数字空心杯塑料Futaba S9256数字双轴承塑料Futaba S9257数字空心杯金属Futaba S9303模拟空心杯Futaba S9304空心杯双轴承金属Futaba S9350数字空心杯金属Futaba S9351数字空心杯双轴承金属Futaba S9402模拟空心杯Futaba S9403空心杯金属Futaba S9404空心杯双轴承金属Futaba S9405模拟空心杯金属Futaba S9450空心杯双轴承金属Futaba S9451数字空心杯双轴承金属Futaba S9452数字空心杯4.8V: 4.8V:43.9 g40.4×20.8×25.4 mm 4.8 千克/厘米0.11 秒/60°6.0V: 6.0V:6.0 千克/厘米0.09 秒/60°4.8V: 4.8V:45.0 g40.9×20.1×24.9 mm7.1 千克/厘米0.14 秒/60°6.0V: 6.0V:8.8 千克/厘米0.11 秒/60°4.8V: 4.8V:31.0 g36.1×15.0×31.0 mm 2.2 千克/厘米0.11 秒/60°6.0V: 6.0V:2.7 千克/厘米0.09 秒/60°4.8V: 4.8V:26.0 g36.1×15.0×29.0 mm 3.6 千克/厘米0.14 秒/60°6.0V: 6.0V:4.5 千克/厘米0.11 秒/60°金属Futaba S9550空心杯双轴承金属Futaba S9551数字空心杯双轴承金属Futaba S9602模拟空心杯双轴承塑料Futaba S9650数字空心杯。

TowerPro 辉盛舵机详细资料SERVO Series Rcommend for modelSG50,SG90 for Helicopter,3D-flyer,F3A;MG995,MG945,SG5010 for Gasoline engine plane, train-flyer ;9805BB forSG50 重量- 6.3g尺寸21.5x11.7x25.1mm力矩0.6kg/cm速度0.3sec/60degree(4.8v)工作电压 4.2-6V温度范围0℃_ 55℃带宽10usSG90 重量- 10g尺寸23x12.2x29mm力矩 1.5kg/cm速度0.3sec/60degree(4.8v)工作电压 4.2-6V温度范围0℃_ 55℃带宽10usMG945 重量- 55.0g尺寸40.7*19.7*42.9mm力矩12kg/cm速度0.25sec/60degree(4.8v)工作电压 4.8-7.2V温度范围0℃_ 55℃带宽10usMG995 重量- 55.0g尺寸40.7*19.7*42.9mm力矩10kg/cm速度0.20sec/60degree(4.8v)工作电压 4.8-7.2V温度范围0℃_ 55℃带宽10usSG5010 重量- 38g尺寸40.2x20.2x43.2mm力矩 3.1kg/cm(4.8V); 4.5kg/cm(6V);速度0.17sec/60degree(4.8v); 0.4sec/60degree(6v)工作电压4.8-6V温度范围0℃_ 55℃带宽20us9805BB 重量- 160g尺寸66x30.2x64.4mm力矩20kg/cm(6V)速度0.20sec/60degree(4.8v)工作电压 4.8-7.2V温度范围0℃_ 55℃带宽10usFUT ABA舵机参数大全S9150 Digital servo■尺寸:47.5X27X25.3mm■重量:53g■速度:0.18sec/60"(4.8V)■扭力:5.8kg:cm(4.8V)——————————————————————————S9151 Digital servo■尺寸:40X20X36.6mm■重量:50g■速度:0.19sec/60"(4.8V)■扭力:9.5kg:cm(4.8V)——————————————————————————S9206■尺寸:40.5X20X37.5mm■重量:53g■速度:0.19sec/60"(4.8V)■扭力:9.5kg:cm(4.8V) ——————————————————————————S9601■尺寸:31X16X30.2mm■重量:31g■速度:0.15sec/60"(4.8V)■扭力:2.4g:cm(4.8V) ——————————————————————————S9250 Digital servo■尺寸:40.5X20X37.5mm■重量:54g■速度:0.11sec/60"(4.8V)■扭力:5.5kg:cm(4.8V) ——————————————————————————S9253 Digital servo■尺寸:40X20X36.6mm■重量:49g■速度:0.08sec/60"(4.8V)■扭力:2.0kg:cm(4.8V) ——————————————————————————S3103■尺寸:21.8X11X19.8mm■重量:9.5g■速度:0.11sec/60"(4.8V)■扭力:1.2kg:cm(4.8V) ——————————————————————————S3102■尺寸:28X13X29.7mm■重量:21g■速度:0.25sec/60"(4.8V)■扭力:3.7kg:cm(4.8V) ——————————————————————————S9450 Digital servo■尺寸:40.5X20X37.5mm■重量:55g■速度:0.10sec/60"(4.8V)■扭力:8.0kg:cm(4.8V) ——————————————————————————S9251 Digital servo■尺寸:40X20X36.6mm■重量:57g■速度:0.07sec/60"(4.8V)■扭力:3.7kg:cm(4.8V) ——————————————————————————S3101■尺寸:28X13X29.3mm■重量:17g■速度:0.18sec/60"(4.8V)■扭力:2.5kg:cm(4.8V) ——————————————————————————S3002■尺寸:31X16X30.2mm■重量:35g■速度:0.20sec/60"(4.8V)■扭力:3.3g:cm(4.8V) ——————————————————————————S9252 Digital servo■尺寸:40.5X20X36.6mm■重量:50g■速度:0.14sec/60"(4.8V)■扭力:6.6kg:cm(4.8V) ——————————————————————————S9101■尺寸:38.5X19.5X34.5mm■重量:45g■速度:0.16sec/60"(4.8V)■扭力:3.1kg:cm(4.8V) ——————————————————————————S135■尺寸:31X16X29.7mm■重量:29.5g■速度:0.15sec/60"(4.8V)■扭力:1.9g:cm(4.8V) ——————————————————————————S9102■尺寸:44.7X22.6X26mm■重量:46g■速度:0.13sec/60"(4.8V)■扭力:3.6kg:cm(4.8V) ——————————————————————————S9202■尺寸:40X20X35.5mm■重量:50g■速度:0.22sec/60"(4.8V)■扭力:5.0kg:cm(4.8V) ——————————————————————————S9001■尺寸:40.4X19.8X36mm■重量:48g■速度:0.18sec/60"(6V)■扭力:5.2kg:cm(6V) ——————————————————————————S3802■尺寸:44X23X43mm■重量:72g■速度:0.56sec/60"■扭力:11.0kg:cm ——————————————————————————S9602■尺寸:36X15X30.7mm■重量:31g■速度:0.09sec/60"(4.8V)■扭力:2.7g:cm(4.8V) ——————————————————————————S9203■尺寸:40.5X20X37.5mm■重量:53g■速度:0.11sec/60"(4.8V)■扭力:5.5kg:cm(4.8V) ——————————————————————————S136G 收轮专用■尺寸:45.2X22.7X25.4mm■重量:42g■速度:0.50sec/60"(4.8V)■扭力:5.5kg:cm(4.8V) ——————————————————————————S3801■尺寸:59.2X28.8X49.8mm■重量:107g■速度:0.26sec/60"■扭力:14.0kg:cm ——————————————————————————S9404■尺寸:39X20X37.4mm■重量:55g■速度:0.11sec/60"■扭力:5.7kg:cm ——————————————————————————S9204■尺寸:40.5X20X37.5mm■重量:53g■速度:0.19sec/60"(4.8V)■扭力:9.5kg:cm(4.8V) ——————————————————————————S135C■尺寸:31X16X30.2mm■重量:29g■速度:0.15sec/60"(4.8V)■扭力:1.9g:cm(4.8V) ——————————————————————————S5301■尺寸:59.2X28.8X49.8mm■重量:125g■速度:0.23sec/60"■扭力:21.0kg:cm ——————————————————————————S9402■尺寸:40.5X20X37.4mm■重量:55g■速度:0.10sec/60"■扭力:8.0kg:cm ——————————————————————————S3003■尺寸:40.4X19.8X36mm■重量:37.2g■速度:0.19sec/60"(6V)■扭力:4.1kg:cm(6V) ——————————————————————————S5801■尺寸:46X25X44mm■重量:83g■速度:0.5sec/60"(7.2V)■扭力:9.8kg:cm(7.2V) ——————————————————————————S3302■尺寸:59.2X28.8X49.8mm■重量:103g■速度:0.19sec/60"■扭力:8.0kg:cmHitec舵机模拟舵机HS-45HB■重量:8g■尺寸:23.6×9.8×22.4mm■拉力:[4.8V] 1.0Kg.cm■转速:[4.8V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-50■重量:6.4g■尺寸:20.9×11.4×22mm■拉力:[4.8V] 0.6Kg.cm■转速:[4.8V] 0.09sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升HS-55■重量:8g■尺寸:22.8×11.6×24mm■拉力:[4.8V] 1.1Kg.cm■拉力:[6.0V] 1.3Kg.cm■转速:[4.8V] 0.17sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-56HB■重量:10.7g■尺寸:22.6×11.6×24mm■拉力:[4.8V] 1.0Kg.cm■拉力:[6.0V] 1.2Kg.cm■转速:[4.8V] 0.12sec/60°■转速:[6.0V] 0.10sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-65HB■重量:11.9g■尺寸:23.6×11.6×24mm■拉力:[4.8V] 1.8Kg.cm■拉力:[6.0V] 2.2Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-65MG■重量:11.9g■尺寸:23.6×11.6×24mm■拉力:[4.8V] 1.8Kg.cm■拉力:[6.0V] 2.2Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型越野车小型模拟舵机HS-77BB■重量:35g■尺寸:44×23×25mm■拉力:[4.8V] 6.6Kg.cm■拉力:[6.0V] 8.2Kg.cm■转速:[4.8V] 0.45c/60°■转速:[6.0V] 0.34sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模HS-81■重量:16.6g■尺寸:29.8×12×29.6mm■拉力:[4.8V] 2.6Kg.cm■拉力:[6.0V] 3Kg.cm■转速:[4.8V] 0.11sec/60°■转速:[6.0V] 0.09sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-82MG■重量:19g■尺寸:29.8×12×29.6mm■拉力:[4.8V] 2.6Kg.cm■拉力:[6.0V] 3Kg.cm■转速:[4.8V] 0.11sec/60°■转速:[6.0V] 0.09sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-85BB+■重量:19.2g■尺寸:29×13×30mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.16sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型船HS-85MG+■重量:21.9g■尺寸:29×13×30mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.16sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-225BB■重量:27g■尺寸:32.4×16.8×31mm■拉力:[4.8V] 3.9Kg.cm■拉力:[6.0V] 4.8Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-225MG■重量:31g■尺寸:32.4×16.8×31mm■拉力:[4.8V] 3.9Kg.cm■拉力:[6.0V] 4.8Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船标准模拟舵机HS-311■重量:43g■尺寸:40×20×36.5mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-322HD■重量:43g■尺寸:40×20×36.5mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-325HB■重量:43g■尺寸:40×20×36.5mm■拉力:[4.8V] 3.3Kg.cm■拉力:[6.0V] 3.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-475HB■重量:40g■尺寸:38.8×19.8×36mm■拉力:[4.8V] 4.4Kg.cm■拉力:[6.0V] 5.5Kg.cm■转速:[4.8V] 0.23sec/60°■转速:[6.0V] 0.18sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-422■重量:45.5g■尺寸:40.6×19.8×36.6mm■拉力:[4.8V] 3.3Kg.cm■拉力:[6.0V] 4.1Kg.cm■转速:[4.8V] 0.21sec/60°■转速:[6.0V] 0.16sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-425BB■重量:45.5g■尺寸:40.6×19.8×36.6mm■拉力:[4.8V] 3.3Kg.cm■拉力:[6.0V] 4.1Kg.cm■转速:[4.8V] 0.21sec/60°■转速:[6.0V] 0.16sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船标准高性能模拟舵机HS-625MG■重量:55.2g■尺寸:40.6×19.8×37.8mm■拉力:[4.8V] 5.5Kg.cm■拉力:[6.0V] 6.8Kg.cm■转速:[4.8V] 0.18sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型越野车HS-635HB■重量:50g■尺寸:40.6×19.8×38.8mm■拉力:[4.8V] 5Kg.cm■拉力:[6.0V] 6Kg.cm■转速:[4.8V] 0.18sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模HS-645MG■重量:55.2g■尺寸:40.6×19.8×37.3mm■拉力:[4.8V] 7.7Kg.cm■拉力:[6.0V] 9.6Kg.cm■转速:[4.8V] 0.24sec/60°■转速:[6.0V] 0.20sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型越野车、小型船HS-965MG■重量:62g■尺寸:40×20×37mm■拉力:[4.8V] 7.4Kg.cm■拉力:[6.0V] 9.5Kg.cm■转速:[4.8V] 0.13sec/60°■转速:[6.0V] 0.10sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型越野车、小型船HS-985MG■重量:62g■尺寸:40×20×37mm■拉力:[4.8V] 9.6Kg.cm■拉力:[6.0V] 12.4Kg.cm■转速:[4.8V] 0.16sec/60■转速:[6.0V] 0.13sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型越野车、小型船专业模拟舵机HS-125MG■重量:24g■尺寸:30×10×34mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.17sec/60°■转速:[6.0V] 0.13sec/60°■推荐用途:竞赛滑翔机、轻量飞机(机翼)HS-755MG■重量:117g■尺寸:59×29×50mm■拉力:[4.8V] 12Kg.cm■拉力:[6.0V] 14.4Kg.cm■转速:[4.8V] 0.28sec/60°■转速:[6.0V] 0.23sec/60°■推荐用途:竞赛滑翔机、小型车模、小型越野车、小型船HS-755HB■重量:110g■尺寸:59×29×50mm■拉力:[4.8V] 11Kg.cm■拉力:[6.0V] 13.2Kg.cm■转速:[4.8V] 0.28sec/60°■转速:[6.0V] 0.23sec/60°■推荐用途:竞赛滑翔机、小型船HS-75BB■重量:35g■尺寸:44×23×25mm■拉力:[4.8V] 6.6Kg.cm■拉力:[6.0V] 8.2Kg.cm■转速:[4.8V] 0.45sec/60°■转速:[6.0V] 0.34sec/60°■推荐用途:竞赛滑翔机、轻量飞机HS-765HB■重量:110g■尺寸:59×29×50mm■拉力:[4.8V] 11Kg.cm■拉力:[6.0V] 13.2Kg.cm■转速:[4.8V] 1.68sec/60°■转速:[6.0V] 1.38sec/60°■推荐用途:帆船■回转角度:140°-210°HS-785HB■重量:110g■尺寸:59×29×50mm■拉力:[4.8V] 11Kg.cm■拉力:[6.0V] 13.2Kg.cm■转速:[4.8V] 1.68sec/60°■转速:[6.0V] 1.38sec/60°■推荐用途:帆船收索机■最大回转角底1890°(5 1/4回转)HS-805BB+■重量:152g■尺寸:66×30×57.6mm■拉力:[4.8V] 19.8Kg.cm■拉力:[6.0V] 24.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、小型车模、小型越野车、小型船HS-815BB■重量:152g■尺寸:66×30×57.6mm■拉力:[4.8V] 19.8Kg.cm■拉力:[6.0V] 24.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:小型帆船■回转角度:140°-210°舵机选择方案。
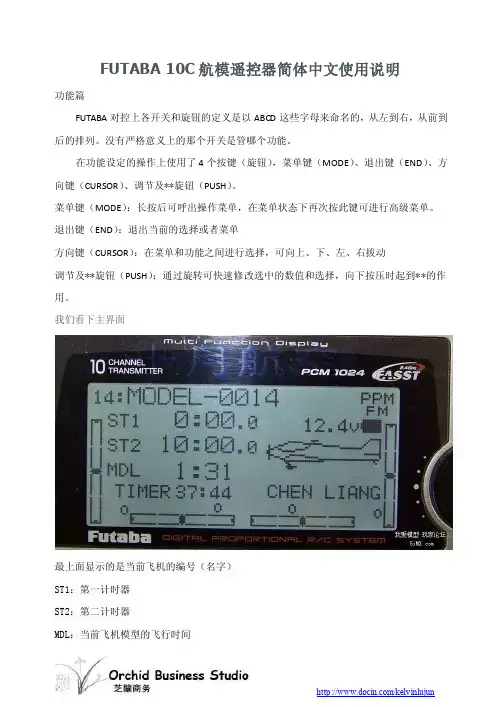
FUTABA 10C航模遥控器简体中文使用说明功能篇FUTABA对控上各开关和旋钮的定义是以ABCD这些字母来命名的,从左到右,从前到后的排列。
没有严格意义上的那个开关是管哪个功能。
在功能设定的操作上使用了4个按键(旋钮),菜单键(MODE)、退出键(END)、方向键(CURSOR)、调节及**旋钮(PUSH)。
菜单键(MODE):长按后可呼出操作菜单,在菜单状态下再次按此键可进行高级菜单。
退出键(END):退出当前的选择或者菜单方向键(CURSOR):在菜单和功能之间进行选择,可向上、下、左、右拔动调节及**旋钮(PUSH):通过旋转可快速修改选中的数值和选择,向下按压时起到**的作用。
我们看下主界面最上面显示的是当前飞机的编号(名字)ST1:第一计时器ST2:第二计时器MDL:当前飞机模型的飞行时间TIMER:开机总时间以上各时间都可以在主界面通过“方向键”选择后长按“PUSH”键来进行归零清除!在主界面的右下角可设定使用者的名字如果不进行设定的话就是默认的FUTABA字样。
右主界面的右上角显示的是当前信号发射的制式“PPM”或者是“PCM”,下方还有电池的容量。
接下来将详细介绍每个功能的使用,先从固定翼开始介绍。
普通功能菜单介绍我们先**主菜单,开机后长按“MODE”会有如下界面:如下图使用“CURSOR”键进行选择并向下翻动可**普通菜单的第二页,如图:我们将普通菜单下的各功能分列并解释一下:MODEL:模型选择/数据复制/模型命名D/R,EXP:大小舵及EXP曲线END POINT:舵机行程SUB-TRIM:舵机微调(电子中立点设定)REVERSE:正反舵TRIM:微调设定及微调清除THROTTLE CUT:熄火开关设置IDEL-DOWN:油门低速混控F/S:失控保护(在PPM模式下没有此选项)AUX-CH:通道自定义PARAMETER:参数设置TIMER:计时器TRAINER:教练功能LOGIC SW:逻辑开关SERVO:通道状态显示/测试固定翼普通功能分解MODEL:模型选择/数据复制/模型命名此项有三个功能分别是:模型选择(10C在不插扩展卡的情况下可记忆15个模型数据)、模型间的数据复制、对记忆模型的命名模型选择见下图使用“CURSOR”键移动到模型数据的编号上,如上图“14”转动“PUSH”进行选择会出现下图要求长按“PUSH”的提示。
INSTRUCTIONMANUALpermission.•The contents of this manual are subject to change without priornotice.•This manual has been carefully written. Please write to Futaba ifyou feel that any corrections or clarifications should be made.Thank you for buying an MC330CR. The MC330CR is a high-frequency drive FET amp with reversefunction developedfor model electriccars.It is compactandlight weight, and uses a simple digitalsetting system.FEATURES•High-frequency drive system•Forward, reverse, and brake operations are alllinear•Reverse operation cancellation function•One-touch input of neutral, high, and brakeMAX points by pushbutton switch•Overcurrent protection function•Heat protector•Low-voltage protection function•Power left on alarm function•Abnormal input signal cancellation function•Checker function (LED display, audible beep)SET UPNeutral, high, and brake MAX points settingBefore setting each point, set the transmitter throttle channel trim to neutral.CHECKER LED DISPLAYRelationship between amp operation and checker LED displayThe amp operates linearly in proportion to the amount of forward, reverse, and brake operation. The amp operatingstate can be checked with the checker LED as shown below.BRAKE/REVERSE OPERATING INSTRUCTIONSOperation can be switched to reverse operation by returning the throttle trigger (or throttlestick) from the brake position to the neutral position.PROTECTION CIRCUIT OPERATIONThe following protection circuits are built into the MC330CR. When a protection circuit operates, remove thecause before operating the model again.Cancelling the reverse functionThe amp reverse function can be cancelled by the following method so that the model can beused even in races that prohibit reverse running. (Brake operation only)[MC330CR T echnical Data]•Operating system: Forward, reverse, and brakeoperations are all linear.•Power requirement: Nicd battery 6~7 cells (7.2~8.4V)•PWM frequency: 1.5kHz (fixed)•Setting: One-touch input by pushbutton switch. Set datais saved to built-in EEPROM.•Current capacity (FET rating): Forward=200A,reverse=100AApplicable motors (Number of turns is criteria.)Use the MC330CR with a motor with 13Tormore turns.*If a motor with a number of turns smaller than the aboveis used, the heat protector and overcurrent protectioncircuit may operate. The number of turns of the motor is acriteria only. Depending on the running conditions, theprotection circuit may operate even if the condition aboveis satisfied.Power supplyNicd battery 6~7 cells (7.2~8.4V)Miniature screwdriverAccessory. Use to press thepushbutton switch.•Continuous rapid blinkcannot be set independently.* If the amp power was turned off during setting, the setting pointscannot be memorized. (The previous settings are retained.)* The confirmation beep sounds only when the motor wasconnected.* Confirmation beep only sounds when the motor was connected.was not performed normally. Repeat setting from"Neutral point setting".FUTABA CORPORATION Makuhari Techno Garden Bldg., B6F 1-3 Nakase, Mihama-ku, Chiba 261-8555, Japan Phone: (043) 296-5118 Facsimile: (043) 296-5124MOUNTING PRECAUTIONSOPERATING PRECAUTIONS(Specifications are subject to change without prior notice.)CONNECTION•Case size: 27.1x333x12.8mm (excluding protruding parts)•Silicon cord gauge size: AWG14 equivalent•Weight: 45g (including connectors and switches)•BEC voltage: 6.0V* When desired, you can enablethe cancelled reverse function byrepeating the operation shown atthe left. (The reverse function isswitched alternately.)*When using the ABS function,after setting up the MC330CR, stopthe reverse function, then turn onthe ABS function. If the ABSfunction is on, the MC330CRcannot be set up correctly.©FUTABA CORPORATION 2000, 7。
Accessories: To purchase Bosch accessories, cleaners & parts please visit /us/store or call 1-800-944-2904 (Mon to Fri 5 am to 6 pm PST, Sat 6 am to 3 pm PST).SHXM78Z54N Black Stainless Steel Also available in:Stainless Steel SHXM78Z55N White SHXM78Z52N BlackSHXM78Z56NPatented CrystalDry™ technology transforms moisture into heat to get dishes, including plastics, 60% drier.142 dBA: dishwasher runs quietly so your kitchen conversations aren’t interrupted.The Flexible 3rd Rack with fold down sides adds 30% more 2 loading area, perfect for utensils and ramekins.The AquaStop® leakprotection system contains leaks through a precisely engineered system. If a leak occurs, the system contains it by shutting down operation andpumping out water. So you have the ultimate peace of mind whether you are away or at home.1Based on aggregate average drying performance of Bosch Dishwashers with CrystalDry on combined household load including plastics, glass, steel, and porcelain as compared to Bosch Dishwashers with PureDry. Drying performance may vary by dish type.2Compared to a Bosch dishwasher with 2 racks.3Certification to NSF/ANSI Standard 184 for residential dishwashers. 4September 2020 running production change to remove adhesive routing clips for power cord. These clips and the edge protector are now included in the dishwasher accessory kit # SMZEPCC1UC.Accessories: To purchase Bosch accessories, cleaners & parts please visit /us/store or call 1-800-944-2904 (Mon to Fri 5 am to 6 pm PST, Sat 6 am to 3 pm PST).Installation DetailsJunction box accessoryInstallation DetailsAccessories: To purchase Bosch accessories, cleaners & parts please visit /us/store or call 1-800-944-2904 (Mon to Fri 5 am to 6 pm PST, Sat 6 am to 3 pm PST).。

AzoteqFEATURES OF MA510-GL-00 Dimension: 22.2 x 20.2 x 2.1 mm Package: LCC + LGA, 86 Pin Operating frequency band:Cat.M1: B 1/B2/B3/B4/B5/B8/B12/B13/B14/B18/B19/B20/B25/B26/B27/B28/B66/B85Cat.NB2: B 1/B2/B3/B4/B5/B8/B12/B13/B18/B19/B20/B25/B26/B28/B66/B71/B85EGPRS: 850/900/1800/1900MHz GNSS: GPS / GLONASS / BeiDou / Galileo Power supply: 3.3 V ~ 4.5 V (typical 3.8 V) Operating temperature: -40 °C ~ +85 °C Cat.M1 (kbps): 589 (DL) / 1119 (UL) Cat.NB2 (kbps): 136 (DL) / 150 (UL) GPRS (kbps): 107 (DL) / 85.6 (UL) EDGE (kbps): 296 (DL) / 236.8 (UL) Antenna: Main x 1, GNSS x 1 Functional interfaces: SIM 1.8V / USB 2.0 x 1 / UART x 3, I2C, I2S, GPIO, SPI / ADC / System Indicator / ANT_TUNER Global certificationsAPPLICATIONSAsset trackingIndustrial monitoring and control Security systems Smart home Smart meteringAPPLICATIONS PC Peripherals IoT Mobile Application White Goods Home AutomationIQS620A IQS621IQS622IQS624The triple-mode (LTE Cat.M1, LTE Cat.NB2 and EGPRS), the dual-mode (LTE Cat.M1 and LTE Cat.NB2), as well as the single-mode module (LTE Cat.M1) are all compatible. The series is based on Qualcomm IC MDM9205, available with LCC and LGA footprint (22.2 x 20.2 x 2.1 mm), supports GNSS (GPS / GLONASS / BeiDou / Galileo), and has given all needed global certifications.The first generation of ProxFusion ® offers capacitive sensing, Hall-effect, IR, PIR, inductive, temperature and ambient light sensing.Replace up to 4 sensors with a single IC Reduce BOMLow Power Consumption High Reliability Less Board Space Less GPIO to MCU Reduce Cost The series is characterized by low power consumption and robust accessibility even inside buildings. In addition, it is very cost effective and has an enormous range, which opens up new possibilities for applications in cities or agriculture.The modules are primarily recommended for applications in which low data throughput rates have to be transmitted securely, like asset tracking, industrial monitoring and control, security systems, smart home, smart metering, etc.Fibocom has developed the brand new LPWA module series namedMA510-GL which will be available in several versions. The derivates enable your application to connect to the network types LTE Cat.M1, LTE Cat.NB2 and EGPRS.PIRH AL LI n du c it v eALSC a p a c i t i v eA c ti v eI RProxFusion ®HAVE A LOOKHAVE A LOOKHAVE A LOOKHAVE A LOOKHAVE A LOOKHAVE A LOOKHAVE A LOOK20CR08F-1-38ND-W 28CRG08-2-N50BD-W 28KUG04X-W 32-8C-2-W36CS08FN-21-N50BT-W 39KUG04XNT-2-W 40KT08-W 4028KSG08-WCSMS18S4.8-8S0.3-P580F CSMS29R8-8S0.6-P700F CMS40R5C-8N1-2A600R CLS50R14-16N3-T700-C32W150R CLS50RN18.2E-8F1.5-B380R CLS87S32.5-8F6-E500RCPA26D12-3.2R CPA36B515TU2C17W80VMW4015B-RRAC383G-7FA VMW6027B-8C464G-7FA32-8C-2-W CSMS18S4.8A-8S0.3-P580F 28CRG08-2-N50BD-W HAVE A LOOK HAVE A LOOK HAVE A LOOK HAVE ALOOK HAVE A LOOK HAVE A LOOK HAVE A LOOK HAVE A LOOK HAVE A LOOKHAVE A LOOK HAVE A LOOK HAVE A LOOK HAVE A LOOK HAVE A LOOK HAVE ALOOK HAVE A LOOKHAVE A LOOKHAVE A LOOKHAVE A LOOKLOCOSYS RTK-4671-SHDR/MHDR is a high-precision GNSS RTK solution targeting for the smart driving and lane level navigation markets. The newly designed LOCO II engine architecture is optimized to offer a seamless experience in dense urban canyons. The high-precision Positioning/Dead Reckoning receiver offers centimeter-accurate positioning and heading with low-power consumption, takes the shortest time to fix position and continues to work wherever they are.LOCOSYS RTK-4671-SHPF /MHPF is a high-precision GNSSRTK board for accurate positioning and heading and direction. It supports GPS, GLONASS, BeiDou, GALILEO, QZSS and SBAS constellations to improve the continuity and reliability of the RTK solution even in harsh environment. This board offers real-time, cost-efficient and cm-level-positioning. It supports flexible interfaces, inside great anti-jamming performance (thanks to multi-tone active interference compensator) for a variety of applications, such as precision navigation, precision agriculture, surveying and UAVs.APPLICATIONSAutonomous Vehicle Guidance Autonomous Vehicle Internet of Vehicles Unmanned Aerial Vehicles Precision Agriculture Hand-Held Device AGV Robotics V2V / V2X System Geographical Measurement Geographical Survey Points Offshore / Marine Applications TrackerAPPLICATIONSAutonomous Vehicle Guidance Unmanned Aerial Vehicles Precision Agriculture AGV Robotics V2X / ETC / 5G Station Structural / Land Monitoring Offshore / Marine ApplicationFEATURESSupports GPS, GLONASS, BeiDou, GALILEO and QZSS L1 Capable of SBAS (WAAS, EGNOS, MSAS) Precise navigation, positioning Great anti-jamming performance(due to multi-tone active interference canceller) Built-in LOCOSYS Dead Reckoning (ADR / UDR) both technology software Built-in MEMS sensor(3-axis gyroscope and 3-axis accelerometer) Supports odometer (wheel-tick pulse) inputFEATURESLow cost, commercial chip level, with high precision and accuracy Centimeter-level positioning in RTK mode Supports GPS, GLONASS, BeiDou, GALILEO and QZSS L1 Capable of SBAS (WAAS, EGNOS, MSAS) Precise navigation, positioning Great anti-jamming performance(due to multi-tone active interference compensator) Dual antenna input and precise heading calculation Current limited feature (limited to 50 mA typ.) 2 x 99 channels each independent signal chains Heading accuracy (RMS) < 0.2 degree Industrial operating temperature range -40 °C to +85 °C Low-power consumption and compact size Easy and simple to integrate LOCOSYS IATF 16949 certified production sitesRTK-4671-SHDR/MHDR not only supports GPS, GLONASS, Beidou, GALILEO, QZSS and SBAS, but also has a flash memory, TCXO, RTC crystal, LNA and SAW filter, and embedded MEMS sensors (6-axis accelerometers + gyros).Supports MEMS raw data output, high update rate(up to 100 Hz) Supports sensors data feed through the UART port Supports ADR / UDR automatic fast learning calibration Low-power consumption and compact size Current limited feature (limited to 50 mA typ.) with active GNSS antennas Industrial operating temperature range -40 °C to +85 °C Easy and simply to integrate LOCOSYS IATF 16949 certified production sitesHAVE ALOOKHAVE A LOOKHAVE A LOOKHAVE A LOOK@ SALES OFFICES IN EUROPESwitzerland − Novitronic Zurich:T +41/44 306 91 91info @novitronic.chFrance Paris:T +33/186653215france @ Lyon:T +33/186653215france2@Bulgaria Sofia:bulgaria @Spain Barcelona:T +34/93 217 31 44spain @ Hungary Budapest:T +361/2 97 41 91hungary @ Austria & Slovenia Brunn am Gebirge:T +43/1 665 25 25austria @ Romania Timisoara:romania @On September 12, 2019, the award ceremony of the magazine Elektronik for "Distributor of the Year" took place.1st placeActive Components:Technical Competence & Support2nd placeActive Components: Delivery service Volume3rd placeActive Components: Samples delivery serviceWe would like to thank you very much for your trust! Thanks to your votes we were awarded 3 prizes which we see as a confirmation of our efforts to support you as a reliable partner! We will continue to offer our customers the best possible service, from the component up to the finished solution for their applications.。
45.0 g40.9×20.1×36.1 mm4.8V:4.8V:9.6 千克/厘米0.15 秒/60°6.0V:6.0V:73.0 g 40.4×21.1×38.4 mm 31.0 千克/厘米0.14 秒/60°4.8V:4.8V:26.0 g35.5×15.0×28.6 mm5.5 千克/厘米0.15 秒/60°6.0V:6.0V:7.0 千克/厘米0.12 秒/60°4.8V:4.8V:51.0 g 48.0×27.9×24.9 mm 8.0 千克/厘米0.13 秒/60°4.8V:4.8V:64.0 g39.9×20.1×36.8 mm14.4 千克/厘米0.19 秒/60°6.0V:6.0V:18.0 千克/厘米0.15 秒/60°4.8V:4.8V:59.5 g 39.9×20.1×36.8 mm 3.8 千克/厘米0.06 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm10.0 千克/厘米0.16 秒/60°6.0V:6.0V:12.6 千克/厘米0.13 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm8.4 千克/厘米0.13 秒/60°6.0V:6.0V:10.6 千克/厘米0.10 秒/60°4.8V:4.8V:51.0 g 39.9×20.1×36.8 mm 3.8 千克/厘米0.06 秒/60°4.8V:4.8V:26.0 g 36.1×15.0×27.9 mm 2.6 千克/厘米0.07 秒/60°4.8V:4.8V:63.0 g39.9×20.1×37.1 mm12.5 千克/厘米0.16 秒/60°6.0V:6.0V:15.6 千克/厘米0.13 秒/60°4.8V:4.8V:63.0 g39.9×20.1×37.1 mm14.4 千克/厘米0.19 秒/60°6.0V:6.0V:18.0 千克/厘米0.15 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm8.5 千克/厘米0.13 秒/60°6.0V:6.0V:10.6 千克/厘米0.10 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm11.2 千克/厘米0.18 秒/60°6.0V:6.0V:14.0 千克/厘米0.14 秒/60°4.8V:4.8V:44.0 g40.9×20.1×24.9 mm7.3 千克/厘米0.13 秒/60°6.0V:6.0V:9.2 千克/厘米0.10 秒/60°4.8V:4.8V:26.0 g36.1×15.0×27.9 mm5.5 千克/厘米0.15 秒/60°6.0V:6.0V:7.0 千克/厘米0.12 秒/60°28.0 g 35.8×19.6×24.9 mm 7.4V:7.4V:7.1 千克/厘米0.11 秒/60°28.0 g 35.8×19.6×24.9 mm 7.4V:7.4V:7.1 千克/厘米0.11 秒/60°21.0 g 36.8×19.6×24.9 mm 7.4V:7.4V:5.0 千克/厘米0.16 秒/60°21.0 g36.8×19.6×24.9 mm7.4V:7.4V:5.0 千克/厘米0.16 秒/60°Futaba BLS151数字无刷双轴承金属Futaba BLS152数字无刷双轴承Futaba BLS153数字无刷Futaba BLS154数字无刷双轴承金属Futaba BLS155数字无刷双轴承金属Futaba BLS251数字无刷双轴承金属Futaba BLS252数字无刷双轴承金属Futaba BLS253数字无刷双轴承Futaba BLS254数字无刷Futaba BLS257数字无刷双轴承金属Futaba BLS351数字无刷双轴承混合Futaba BLS352数字无刷双轴承金属Futaba BLS451数字无刷金属Futaba BLS452数字无刷双轴承金属Futaba BLS551数字无刷Futaba BLS651数字无刷双轴承金属Futaba RS301CR-F1数字空心杯金属Futaba RS301CR-F2数字金属Futaba RS302CD-F1数字金属Futaba RS302CD-F2数字63.0 g39.9×20.1×37.6 mm 6.0V: 6.0V:14.1 千克/厘米0.13 秒/60°47.5 g39.9×20.1×39.1 mm 6.0V: 6.0V:8.9 千克/厘米0.20 秒/60°6.2 g22.9×10.2×20.3 mm 4.8V: 4.8V:1.6 千克/厘米0.10 秒/60°65.2 g39.6×22.4×42.9 mm 4.8V: 6.0V:9.3 千克/厘米0.62 秒/60°4.8V: 4.8V:42.0 g46.0×23.1×24.9 mm 4.3 千克/厘米0.60 秒/60°6.0V: 6.0V:5.5 千克/厘米0.50 秒/60°4.8V: 4.8V:44.4 g39.9×20.1×36.1 mm 2.4 千克/厘米0.28 秒/60°6.0V: 6.0V:3.0 千克/厘米0.22 秒/60°4.8V: 4.8V:45.0 g39.9×20.1×36.1 mm 2.4 千克/厘米0.28 秒/60°6.0V: 6.0V:3.0 千克/厘米0.22 秒/60°4.8V: 4.8V:35.0 g31.0×16.0×30.0 mm 2.7 千克/厘米0.25 秒/60°6.0V: 6.0V:3.3 千克/厘米0.20 秒/60°4.8V: 4.8V:37.0 g39.9×20.1×36.1 mm 3.2 千克/厘米0.23 秒/60°6.0V: 6.0V:4.1 千克/厘米0.19 秒/60°4.8V: 4.8V:37.0 g39.9×20.1×36.1 mm 3.2 千克/厘米0.23 秒/60°6.0V: 6.0V:4.1 千克/厘米0.19 秒/60°4.8V: 4.8V:41.0 g39.9×20.1×38.1 mm 5.2 千克/厘米0.20 秒/60°6.0V: 6.0V:6.5 千克/厘米0.16 秒/60°41.1 g39.9×20.1×38.1 mm 6.0V: 6.0V:6.5 千克/厘米0.16 秒/60°4.8V: 4.8V:49.0 g39.9×20.1×38.1 mm 5.2 千克/厘米0.20 秒/60°6.0V: 6.0V:6.5 千克/厘米0.16 秒/60°Futaba S30514.8V: 4.8V:17.0 g26.7×12.7×28.4 mm 2.5 千克/厘米0.18 秒/60°6.0V: 6.0V:3.1 千克/厘米0.14 秒/60°4.8V: 4.8V:21.0 g27.9×13.0×30.0 mm 3.7 千克/厘米0.25 秒/60°6.0V: 6.0V:4.6 千克/厘米0.20 秒/60°4.8V: 4.8V:9.6 g21.8×10.9×19.8 mm 1.3 千克/厘米0.11 秒/60°6.0V: 6.0V:1.5 千克/厘米0.09 秒/60°4.8V: 4.8V:95.0 g58.9×29.0×50.0 mm9.2 千克/厘米0.21 秒/60°双轴承金属Futaba RS403PR数字空心杯金属Futaba RS404PD数字3-poleFutaba S110M模拟单轴承塑料Futaba S125模拟双轴承塑料Futaba S136G模拟3-pole衬套塑料Futaba S148模拟3-pole单轴承塑料Futaba S3001模拟3-pole双轴承金属Futaba S3002模拟3-pole塑料Futaba S3003模拟双轴承塑料Futaba S3004模拟3-pole单轴承塑料Futaba S3010模拟3-poleFutaba S3014金属Futaba S3050数字Futaba S31015-pole衬套混合Futaba S3102模拟3-pole金属Futaba S31033-pole衬套塑料Futaba S3104模拟3-pole9.6 g21.6×10.9×19.8 mm 1.3 千克/厘米0.11 秒/60°6.0V: 6.0V:1.5 千克/厘米0.09 秒/60°9.0 g22.1×10.9×20.1 mm 4.8V: 4.8V:1.2 千克/厘米0.12 秒/60°7.7 g20.6×11.4×22.1 mm 4.8V: 4.8V:1.2 千克/厘米0.12 秒/60°7.3 g22.9×10.2×20.3 mm 4.8V: 4.8V:1.2 千克/厘米0.12 秒/60°4.8V:0.14 秒/60°6.5 g22.9×10.2×20.3 mm 4.8V: 4.8V:0.5 千克/厘米0.14 秒/60°7.3 g21.8×10.9×19.8 mm 4.8V: 4.8V:1.6 千克/厘米0.10 秒/60°6.3 g22.1×10.9×20.1 mm 4.8V: 4.8V:0.6 千克/厘米0.12 秒/60°4.8V: 4.8V:6.3 g22.1×10.9×20.1 mm0.6 千克/厘米0.12 秒/60°4.8V: 4.8V:9.6 g21.8×10.9×20.3 mm 1.2 千克/厘米0.11 秒/60°6.0V: 6.0V:1.5 千克/厘米0.10 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×20.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×20.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°17.0 g27.9×13.0×30.0 mm 4.8V: 4.8V:2.8 千克/厘米0.15 秒/60°4.8V: 4.8V:8.5 g22.1×10.9×23.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°23.0 g30.0×10.9×29.0 mm 4.8V: 4.8V:3.7 千克/厘米0.24 秒/60°4.8V: 4.8V:42.0 g40.9×20.1×36.1 mm 3.1 千克/厘米0.21 秒/60°6.0V: 6.0V:3.9 千克/厘米0.17 秒/60°4.8V: 4.8V:41.0 g39.9×20.1×38.1 mm 5.0 千克/厘米0.22 秒/60°6.0V: 6.0V:6.3 千克/厘米0.18 秒/60°4.8V: 4.8V:9.6 g22.1×10.9×20.1 mm 1.4 千克/厘米0.11 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:9.6 g22.1×10.9×20.1 mm 1.4 千克/厘米0.13 秒/60°6.0V: 6.0V:1.7 千克/厘米0.11 秒/60°4.8V: 4.8V:7.9 g22.1×10.9×20.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°塑料Futaba S31063-pole塑料Futaba S3107模拟3-poleFutaba S3108Futaba S3108M3-poleFutaba S3109Futaba S3109MFutaba S3110模拟塑料Futaba S3111模拟塑料Futaba S3111M模拟塑料Futaba S3113模拟衬套塑料Futaba S3114模拟3-pole衬套塑料Futaba S3114M模拟3-pole塑料Futaba S3115模拟塑料Futaba S3117模拟双轴承金属Futaba S3150数字空心杯单轴承塑料Futaba S3151数字3-pole单轴承塑料Futaba S3152数字空心杯塑料Futaba S3153数字金属Futaba S3153MG数字塑料Futaba S3154数字20.0 g30.0×10.9×29.0 mm 2.0 千克/厘米0.16 秒/60°6.0V:0.13 秒/60°4.8V: 4.8V:9.3 g22.1×10.9×22.1 mm 2.0 千克/厘米0.13 秒/60°6.0V: 6.0V:2.4 千克/厘米0.11 秒/60°4.8V: 4.8V:8.3 g22.1×10.9×23.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×23.1 mm 1.5 千克/厘米0.10 秒/60°6.0V: 6.0V:1.7 千克/厘米0.09 秒/60°4.8V: 4.8V:26.0 g35.1×16.0×25.9 mm 6.8 千克/厘米0.57 秒/60°6.0V: 6.0V:8.5 千克/厘米0.47 秒/60°4.8V: 4.8V:103.0 g58.9×29.0×50.0 mm 6.4 千克/厘米0.24 秒/60°6.0V: 6.0V:8.0 千克/厘米0.19 秒/60°4.8V: 4.8V:19.9 g30.0×9.9×29.0 mm 2.2 千克/厘米0.15 秒/60°4.8V: 4.8V:47.0 g39.9×20.1×38.1 mm7.1 千克/厘米0.25 秒/60°6.0V: 6.0V:8.9 千克/厘米0.20 秒/60°4.8V: 4.8V:126.0 g66.0×30.0×56.9 mm19.2 千克/厘米0.20 秒/60°6.0V: 6.0V:24.0 千克/厘米0.16 秒/60°4.8V: 4.8V:47.1 g40.6×20.1×37.3 mm 2.6 千克/厘米0.19 秒/60°6.0V: 6.0V:3.2 千克/厘米0.15 秒/60°4.8V: 4.8V:107.0 g58.9×29.0×50.0 mm11.2 千克/厘米0.30 秒/60°6.0V: 6.0V:14.0 千克/厘米0.26 秒/60°4.8V: 4.8V:72.0 g43.9×23.1×42.9 mm8.8 千克/厘米0.70 秒/60°6.0V: 6.0V:11.0 千克/厘米0.56 秒/60°4.8V: 4.8V:127.0 g58.9×29.0×50.0 mm15.2 千克/厘米0.25 秒/60°6.0V: 6.0V:19.0 千克/厘米0.20 秒/60°4.8V: 4.8V:125.0 g58.9×29.0×50.0 mm16.8 千克/厘米0.29 秒/60°6.0V: 6.0V:21.0 千克/厘米0.23 秒/60°4.8V: 4.8V:125.0 g58.9×29.0×50.0 mm13.6 千克/厘米0.19 秒/60°6.0V: 6.0V:17.0 千克/厘米0.15 秒/60°金属Futaba S3155数字金属Futaba S3156MG数字Futaba S3157数字Futaba S3157M数字双轴承金属Futaba S3170G数字双轴承混合Futaba S3302模拟3-poleFutaba S3303数字双轴承金属Futaba S3305模拟3-pole双轴承塑料Futaba S3306模拟3-pole金属Futaba S34015-pole双轴承混合Futaba S3801模拟3-pole双轴承混合Futaba S3802模拟3-pole双轴承金属Futaba S5050数字5-pole双轴承金属Futaba S5301模拟5-pole双轴承金属Futaba S5302模拟5-pole83.0 g46.0×24.9×43.9 mm7.8 千克/厘米0.10 秒/60°7.2V:7.2V:9.8 千克/厘米0.08 秒/60°4.8V: 4.8V:48.0 g39.9×20.1×36.1 mm 3.9 千克/厘米0.22 秒/60°6.0V: 6.0V:5.2 千克/厘米0.18 秒/60°4.8V: 4.8V:31.0 g31.0×16.0×31.0 mm 2.5 千克/厘米0.18 秒/60°6.0V: 6.0V:3.1 千克/厘米0.14 秒/60°4.8V: 4.8V:32.0 g35.8×19.6×24.9 mm 4.5 千克/厘米0.18 秒/60°6.0V: 6.0V:5.5 千克/厘米0.15 秒/60°7.2V:7.2V:6.8 千克/厘米0.12 秒/60°4.8V: 4.8V:42.5 g38.6×20.3×34.5 mm 2.5 千克/厘米0.20 秒/60°6.0V: 6.0V:3.1 千克/厘米0.16 秒/60°4.8V: 4.8V:48.0 g39.9×20.1×36.1 mm 2.9 千克/厘米0.16 秒/60°6.0V: 6.0V:3.6 千克/厘米0.13 秒/60°53.0 g48.0×26.9×24.9 mm 4.8V: 4.8V:5.8 千克/厘米0.18 秒/60°50.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:9.5 千克/厘米0.19 秒/60°4.8V: 4.8V:85.0 g49.0×24.9×39.9 mm16.0 千克/厘米0.23 秒/60°6.0V: 6.0V:20.0 千克/厘米0.19 秒/60°4.8V: 4.8V:85.0 g49.0×24.9×39.9 mm12.0 千克/厘米0.19 秒/60°6.0V: 6.0V:15.0 千克/厘米0.15 秒/60°53.0 g48.0×26.9×24.9 mm 4.8V: 4.8V:4.6 千克/厘米0.14 秒/60°4.8V: 4.8V:61.0 g39.9×20.1×37.1 mm11.0 千克/厘米0.16 秒/60°6.0V: 6.0V:13.8 千克/厘米0.13 秒/60°4.8V: 4.8V:63.0 g39.9×20.1×37.1 mm19.6 千克/厘米0.21 秒/60°6.0V: 6.0V:24.5 千克/厘米0.17 秒/60°71.0 g40.9×21.1×37.1 mm 6.0V: 6.0V:30.6 千克/厘米0.14 秒/60°48.2 g40.4×20.1×35.6 mm 6.0V: 6.0V:5.0 千克/厘米0.22 秒/60°4.8V: 4.8V:53.0 g40.9×20.1×38.1 mm 4.0 千克/厘米0.27 秒/60°6.0V: 6.0V:5.0 千克/厘米0.22 秒/60°53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V:5.5 千克/厘米0.11 秒/60°53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V:9.5 千克/厘米0.19 秒/60°双轴承金属Futaba S5801模拟5-pole单轴承塑料Futaba S9001模拟空心杯双轴承混合Futaba S9002模拟空心杯双轴承金属Futaba S9070数字无刷Futaba S9101空心杯双轴承塑料Futaba S9102模拟空心杯双轴承塑料Futaba S9150数字空心杯双轴承塑料Futaba S9151数字空心杯双轴承金属Futaba S9152数字空心杯双轴承金属Futaba S9153数字空心杯塑料Futaba S9154数字空心杯金属Futaba S9155数字空心杯双轴承金属Futaba S9156数字空心杯双轴承金属Futaba S9157数字空心杯Futaba S9201模拟双轴承塑料Futaba S9202模拟空心杯双轴承Futaba S9203模拟空心杯双轴承金属Futaba S9204模拟空心杯53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V:5.5 千克/厘米0.11 秒/60°53.0 g40.9×20.1×38.1 mm 4.8V: 4.8V:9.5 千克/厘米0.19 秒/60°54.0 g40.9×20.1×38.1 mm 4.8V: 4.8V:5.5 千克/厘米0.11 秒/60°57.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:3.7 千克/厘米0.07 秒/60°50.0 g39.9×20.1×37.1 mm4.8V: 4.8V:6.6 千克/厘米0.14 秒/60°49.3 g38.1×19.1×35.6 mm 4.8V: 4.8V:2.0 千克/厘米0.08 秒/60°49.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:3.4 千克/厘米0.06 秒/60°55.0 g39.9×20.1×37.1 mm4.8V: 4.8V:9.0 千克/厘米0.16 秒/60°4.8V: 4.8V:57.0 g39.9×20.1×37.1 mm 3.4 千克/厘米0.06 秒/60°26.0 g36.1×15.0×29.0 mm 4.8V: 4.8V:2.0 千克/厘米0.08 秒/60°65.2 g40.4×20.1×39.4 mm 4.8V: 4.8V:7.1 千克/厘米0.19 秒/60°51.0 g40.4×20.1×35.6 mm 4.8V: 4.8V:4.1 千克/厘米0.28 秒/60°6.0V: 6.0V:5.0 千克/厘米0.22 秒/60°61.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:8.0 千克/厘米0.15 秒/60°6.0V: 6.0V:10.0 千克/厘米0.12 秒/60°4.8V: 4.8V:61.0 g39.9×20.1×37.1 mm11.0 千克/厘米0.16 秒/60°6.0V: 6.0V:13.8 千克/厘米0.13 秒/60°4.8V: 4.8V:55.0 g40.9×20.1×38.1 mm 6.4 千克/厘米0.12 秒/60°6.0V: 6.0V:8.0 千克/厘米0.10 秒/60°48.2 g40.4×20.1×35.6 mm 4.8V: 4.8V:3.2 千克/厘米0.16 秒/60°55.0 g39.1×20.1×37.3 mm4.8V: 4.8V:5.7 千克/厘米0.11 秒/60°4.8V: 4.8V:55.0 g40.9×20.1×38.1 mm 5.8 千克/厘米0.13 秒/60°6.0V: 6.0V:7.2 千克/厘米0.11 秒/60°4.8V: 4.8V:55.0 g40.4×20.1×37.6 mm 6.4 千克/厘米0.10 秒/60°6.0V: 6.0V:8.0 千克/厘米0.08 秒/60°4.8V: 4.8V:56.0 g40.0×20.0×36.0 mm7.0 千克/厘米0.13 秒/60°6.0V: 6.0V:8.0 千克/厘米0.10 秒/60°4.8V: 4.8V:50.0 g39.9×20.1×34.0 mm7.3 千克/厘米0.13 秒/60°6.0V: 6.0V:9.2 千克/厘米0.11 秒/60°金属Futaba S9205双轴承金属Futaba S9206模拟空心杯双轴承金属Futaba S9250数字空心杯双轴承金属Futaba S9251数字空心杯双轴承塑料Futaba S9252数字空心杯双轴承塑料Futaba S9253数字空心杯双轴承塑料Futaba S9254数字空心杯单轴承金属Futaba S9255数字空心杯塑料Futaba S9256数字双轴承塑料Futaba S9257数字空心杯金属Futaba S9303模拟空心杯Futaba S9304空心杯双轴承金属Futaba S9350数字空心杯金属Futaba S9351数字空心杯双轴承金属Futaba S9402模拟空心杯Futaba S9403空心杯金属Futaba S9404空心杯双轴承金属Futaba S9405模拟空心杯金属Futaba S9450空心杯双轴承金属Futaba S9451数字空心杯双轴承金属Futaba S9452数字空心杯4.8V: 4.8V:43.9 g40.4×20.8×25.4 mm 4.8 千克/厘米0.11 秒/60°6.0V: 6.0V:6.0 千克/厘米0.09 秒/60°4.8V: 4.8V:45.0 g40.9×20.1×24.9 mm7.1 千克/厘米0.14 秒/60°6.0V: 6.0V:8.8 千克/厘米0.11 秒/60°4.8V: 4.8V:31.0 g36.1×15.0×31.0 mm 2.2 千克/厘米0.11 秒/60°6.0V: 6.0V:2.7 千克/厘米0.09 秒/60°4.8V: 4.8V:26.0 g36.1×15.0×29.0 mm 3.6 千克/厘米0.14 秒/60°6.0V: 6.0V:4.5 千克/厘米0.11 秒/60°金属Futaba S9550空心杯双轴承金属Futaba S9551数字空心杯双轴承金属Futaba S9602模拟空心杯双轴承塑料Futaba S9650数字空心杯。
黑线(接地),红线(电源线)和白色(控制线)。
以下为Futaba S3010的参数说明:S表示舵机,3表示它用的是三级马达,0表示是泛用型,10是指此舵机为模拟电路控制舵机。
舵机S3010技术规格规格,舵机,技术整体介绍:主用途通用伺服器特征低成本,高扭矩基板S256马达Tricore GM1510VR TR133-15其他MATAL轴承,引线长300mm,HORND寸法(L×W×H)40.0×20×38.1[mm]重量41[g]消费电流:停止时MAX15[mA](无负荷)(4.8V时)动作时130+25[mA](无负荷)消费电流:停止时MAX15[mA](无负荷)(参考值:6.0V时)动作时145+30[mA](无负荷)输出扭矩:6.0V时 6.5+1.3[Kg.cm]动作速度 6.0V时0.16+0.02[Sec/60度](以下数据说明了当S3010:高电平为1520us时:一定为中间位置;高电平为920us时:一定为最左边位置;高电平为2120us时:一定为最右边位置;这些数据说明了该舵机的转角只与高电平脉宽有关,与占空比无关。
)动作方向:CW pulse窄(1520→920[us])CCW pulse宽(1520→2120[us])动作角度:CW60+10[度]CCW60+10[度]左右差MAX10[度]dead Band:6+3us(除去自动检查夹具)静电耐量:接触8KV以上Backlash:MAX0.7[度]晃动量:MAX0.3[mm]摆动:MAX1[回]/600[us]微动,不灵敏带:动作速度100ms/度,不在动作范围使用电压范围:4.0~6.0[V]使用温度范围:-10~+45[℃]保存温度范围:-20~+60[℃]其他:非指定时之测量电压=4.8[V]幅率=14.25[mS]。
感谢您购买本产品!无刷动力系统功率强大,错误的使用可能造成人身伤害和设备损坏。
我们强烈建议您在使用设备前仔细阅读本说明书,并严格遵守规定的操作程序。
我们不承担因使用本产品而引起的任何责任,包括但不限于对附带损失或间接损失的赔偿责任;同时,我们不承担因擅自对产品进行修改所引起的任何责任。
我们有权在不经通知的情况下变更产品设计、外观、性能及使用要求。
· 电调与相关连接部件连接前,请确保所有电线和连接部件绝缘良好,短路会毁坏电调。
· 请务必仔细连接好各部件,若连接不良,您可能不能正常控制赛车,或出现设备损坏等其他不可预知的情况。
· 使用此电调前,请认真查看各动力设备以及车架说明书,确保动力搭配合理,避免因错误的动力搭配导致电机超载,最终损坏电调。
· 内置多种常用模式(如:零进角Zero Timing闪灯模式、一般练习模式、STOCK 竞赛模式),适合所有竞赛,即选即用。
电调的设定参数可以导入导出,便于车手相互交流和借鉴彼此的设定。
· 体积非常之小(31.6x25.8x16.2mm),车架布局更方便;重量非常之轻(不含线重量仅为23.5g),低重量为车架的平衡提供更多的可调空间。
· 内置BEC升压电路,BEC最大输出电流高达6A,且支持 6V和7.4V 切换,轻松驱动各种强力舵机及高压舵机。
03产品特色02注意事项05连接电子调速器06设置电子调速器设定油门行程1XERUN XR10 STOCK SPEC 1S车用无刷电子调速器使用说明书01声明1. 连接马达:连接有感无刷马达与无感无刷马达的方式有差异,请务必遵照如下接线方式: · 连接有感无刷马达时:电调与马达相连有严格的线序要求,电调的#A/#B/#C必须与电机的#A/#B/#C三线严格一一对应,用6针感应线把电调与电机的感应口对接。
若有感无刷马达未接上感应线,则电调会工作 在无感模式,相当于电调连接无感无刷电机。
Wave Bathing & Transfer SystemZ210, Z220, & Z230 Product ManualZ210, Z220 & Z230 Product ManualContentsImportant information 3Safety messages 4Recommended use and item dimensions 5Check your order 6Basic componentsLegs 6Back 7Seat 7Seat with calf rest 7Head blocks 8Soft fabric cover 8Chest strap and leg straps 8 AccessoriesTub stand 9Shower stand 10Tub transfer base 11-12Conversion kit 12 Operation and maintenance 13Cleaning and warranty 14Materials and user modifi cations 15© 2018 Rifton Equipment2IMPORTANTPlease save this product manual for future reference. Additional copies areavailable at /customer-service/product-manuals.3• Thoroughly read and understand the information in this product manual beforeattempting to use this product. If the procedures and instructions in this product manualare not followed, serious injury or death could occur.• A qualifi ed professional must assess the appropriateness and safety of all equipment foreach user.• This product is intended for use by clients of unreliable judgment. Adult supervision isrequired at all times.• To prevent falls and injuries:○Do not use this product on rough and uneven terrain, around swimming pools, ornear stairways.○Ensure the appropriate use of straps and supports at all times. Straps and supportsare provided for the safety of the user and must be carefully adjusted for comfort andsecurity.○Tighten all adjustment knobs before use and immediately after making anyadjustments.• Do not use this product for clients outside the height and weight limits specifi ed in thismanual.• To prevent pinching or crushing, ensure that all hands and feet are clear of moving partsduring adjustment.• To prevent structural failure, which may result in serious injury or death:○Inspect this product and accessories regularly for loose or missing screws, metalfatigue, cracks, broken welds, missing attachments, general instability or other signsof excessive wear.○Immediately remove this product from use when any condition develops that mightmake operation unsafe.○Do not use Rifton components or products for any purpose other than theirintended use.• To prevent drowning, use extra caution when using the bath chair in a bathtub.4Recommended useThe Rifton Wave bathing and transfer system is a Class 1 medical device. It is intendedto provide a stable, quick-drying seat for bathing or showering for individuals with disabilities. Adjustments and additional supports are available for the safety and comfort of the user. The tub transfer base enables easier transfers over the bathtub for large users.Seat depth10½ (27)13 (33)17 (43)Seat width15 (38)15 (38)17½ (44)Back height23 (58)26½ (67)32 (81)Seat height2/7 (5/18)2/7 (5/18)2/7 (5/18)Seat height including tub stand12½-18½ (32-47)12½-18½ (32-47)12½-18½ (32-47)Seat height including shower stand27½ (70)27½ (70)27½ (70)Seat height including transfer base with long leg inserts21-26 (53-66)24½ - 29½ (62-75)21-26 (53-66)24½ - 29½ (62-75)21-26 (53-66)24½ - 29½ (62-75)Length of mesh area when fl at(without calf rest)35 (89)41 (104)50½ (128) Length of mesh area when fl at(with calf rest)42½ (108)49 (124)61 (155) Width of base18 (46)18 (46)21 (53) Length of base when fl at29½ (75)29½ (75)29½ (75) Tub stand height (legs fl at)8 (20)8 (20)8 (20) Tub stand length (legs fl at)39 (99)39 (99)39 (99) Tub stand width (legs fl at)17½ (44)17½ (44)17½ (44) Shower stand height22 (56)22 (56)22 (56) Shower stand width27 (69)27 (69)27 (69) Shower stand length34 (86)34 (86)34 (86) Tub transfer base footprint28 x 30 (71 x 76)28 x 30 (71 x 76)28 x 30 (71 x 76)Max. tub height for transfer base with long leg inserts 20 (51)24 (61)20 (51)24 (61)20 (51)24 (61)Max. working load - Lbs. (kg)75 (34)150 (68)250 (114)Back and seat angle adjustments0˚, 15˚, 30˚, 45˚, 60˚, 75˚User and item dimensions56Check your orderYour Wave bathing and transfer system comes with the bath chair completely assembled. You will only need to attach it to whatever base you are using, and position the backrest, seat and headblocks appropriately before use.If your shipment is incomplete or in any way damaged on arrival, please call Customer Service, 800.571.8198.Figure 6a132Figure 6bThe Wave bath chair comes in small, medium, and large sizes. It can be used with or without a tub stand, shower stand, or tub transfer base. A soft fabric cover with padding is part of the standard product.LegsThe bath chair legs adjust to raise or lower the chair by 7" (18 cm). You can also get an intermediate height by raising the front legs only.Figure 6a: To raise or lower the chair:1. Pull crossbar outward.2. Rotate legs up or down.3. Push crossbar in to engage.Figure 6b: The bath chair folds fl at forstorage.Basic itemFigure 7aFigure 7bBackFigure 7a: The bath chair back adjusts in15° increments with a one-hand latch. Toadjust the back:1. Squeeze gray handle (A) up behindchair back.2. Rotate back to desired position.3. Release gray handle to engage thelatches at desired angle.SeatFigure 7b: The seat angle adjusts in 15°increments. Increasing the angle can helpprevent the user from sliding forward on theseat. To adjust the seat:1. Pull the two gray triggers (B) under thefront edge of the seat towards you.2. Rotate the seat to the appropriateposition.3. Release both triggers to engage thelatches.Seat with calf restTo prevent seriousinjury, fold calf restdown during transfers. Full weight oncalf rest may break it or tip chair.Figure 7c: If you purchased the calf restoption, it is attached to the seat front andadjusts independently of the seat. To adjustthe calf rest:1. Hold the calf rest fi rmly while pressingthe gray buttons (C) on both sides.2. Adjust the calf rest to the desired angle.3. Release both gray buttons engagelatches.Figure 7cABC78Head blocksFigure 8a: Slide the head blocks in and outon the strap to adjust spacing. They can also be positioned at any height using the hook and loop fasteners at the back.Soft fabric coverThe fabric cover for the bath chair is made of soft polyester knit for comfort. Extra padding between the fabric and the frame softens surface contact.Chest strapsTo preventstrangulation, ensurecorrect adjustment and positioning of the chest strap at each use.Two choices of chest straps are available in soft polyester knit material.Figure 8b: The standard chest strap’s topportion encircles the user, and the back portion attaches around the bath chair back with a buckle.Figure 8c: The chest strap with lateral positioning also buckles around the backof the chair, but has additional side pieces (A) that stabilize the chest strap laterally.Leg strapsFigure 8d: Fasten the leg straps to the seatwith the buckle underneath. Use the legstraps to secure the user’s legs.Figure 8b: standard chest strapFigure 8aFigure 8c: chest strap with lateral positioningFigure 8dA9Figure 9bFigure 9cFigure 9aAccessoriesTub standTo prevent falls, make sure all fourchair legs are fi rmly latched in the sockets on the stand before using the tub stand.Figure 9a: The tub stand raises the bathchair to a seat height of either 12½" (32 cm) or 18½" (47 cm), depending on whether the tub stand legs are raised or lowered (see page 6).Figure 9b: To attach the chair onto the tubstand:1. Rotate front and back bath chair legs down into the vertical position (see page 6).2. Insert the legs into the four sockets.3. Press down fi rmly until the latches click into place.To release :Figure 9c:1. Press down on both gray latches at one end of the tub stand.2. Firmly lift up the bath chair, so that the two latches on the other end disengage.The tub stand is not sized to fi t onto the showerstand or another tub stand.NOTICE10Figure 10aFigure 10bShower standTo prevent falls, make sure all fourchair legs are fi rmly latched in the sockets on the stand before using the shower stand.Figure 10a: The shower stand puts the bathchair on wheels at standing height for the caregiver. All three sizes of bath chair fi t on the same shower stand.To attach:Figure 10b:1. Rotate front and back bath chair legs down into the vertical position (see page 6).2. Insert bath chair legs into the shower stand sockets.3. Press down fi rmly until the gray latches (A) engage.To release :Figure 10c:1. Press down on both gray latches (A) at one end of the shower stand.2. Lift up the bath chair, and the latches at the other end will disengage.Figure 10cAA11Figure 11cFigure 11aFigure 11bABCFigure 11dFigure 11eDTub transfer baseTo prevent falls and injuries:• Make sure front wheels are locked during transfers.• Make sure both front and rear bath chair legs are securely latched onto the base.The tub transfer base enables clients in the bathchair to be transferred over a bath tub with zero lifting.Figure 11a: To set up base:1. Squeeze latches (A) on underside of base at both ends, fold legs out until they click into place.2. Place legs of the wider end of the transfer base in bathtubFigure 11b: To install bath chair onto tubtransfer base:1. Rotate front and back bath chair legs up into the horizontal position (see page 6).2. Slide crossbar of front legs under the white hook (B) on the narrower end of the transfer base.3. Push back of bath chair down fi rmly to latch bar of rear bath chair legs under the gray latch (C).Transfers:1.Figure 11c: To rotate top platform, press either of the gray buttons (D) at one of the front corners. Start transfers with bath chair facing out from the tub.2. Figure 11c: Pull tub transfer base forward if desired and lock wheels. This allows room to use a mechanical lift if needed.3. Transfer user onto bath chair seat and secure with strap(s).4. Figure 11d: Release wheel brakes, push tub transfer base over the tub and lock wheels.5. Figure 11e: Rotate bath chair 90°, lifting user’s legs over side of tub.12Figure 12aSwitching your tub transfer base from counterclockwise to clockwise confi guration (or the reverse):1. Figure 12a: Remove the two screws with a 5/32” hex tool. Lift the top platform off. Remove the two plastic glides (A) and the plastic plug (B) from the third hole (easier to do from the back).2. Figure 12b: Pry out the long plastic stop (C) from the groove as shown. You may need a screwdriver or other tool to pull it out.3. Figure 12c: Insert the plastic stop (C) on the other end of the same groove as shown. Then slide the rear slider (D) over until it hits the stop.4. Figure 12d: Set the top platform on again; now the rear slider (D) should be in the other rear hole as shown.5. Insert the two screws again and tighten with the 5/32” hex tool. Press the plastic plug (B) into the empty third hole. Now your tub transfer base is ready to use in the opposite confi guration.Conversion kitFigure 12e: The conversion kit convertsthe small pink or blue Rifton bath chairs to a medium size, tool-free. Call customer service to order.Figure 12bFigure 12cFigure 12dABCCDBFigure 12eWithout calf rest With calf restDOperationThe Rifton bath chair is intended for use in a bathtub or shower. It’s adjustability and accessories enable bathing or showering clients with a wide range of disabilities. Theseat and back angles adjust easily to accommodate positioning needs. Head Blocks,chest straps, and leg straps are designed for the safety of the user, and must be carefullyadjusted for comfort and security. The bath chair legs can be placed securely in twopositions to raise or lower the bath chair prior to use.MaintenanceThis product is designed and tested for an expected life of 5 years when used andmaintained in accordance with this manual. At all times, users must ensure that theproduct remains in a safe and useable condition, including regular maintenance andinspections as specifi ed in this manual.To prevent structural failure, which may result in serious injury or death:• Inspect this product and accessories regularly for loose or missing screws, metalfatigue, cracks, broken welds, missing attachments, general instability or other signs of excessive wear.• Immediately remove this product from use when any condition develops that mightmake operation unsafe.• Do not use Rifton components or products for any purpose other than theirintended use.• Replace or repair components or products that are damaged or appear to be unstable.• Use only Rifton authorized replacement parts. Order information for replacement partsis provided on the back of this product manual.1314Figure 14aCleaningThe Rifton bathing system is designed for easy cleaning.Figure 14a: Remove the fabric cover byadjusting both the seat and back to a near vertical position and pulling cover from frame, seat part fi rst.Fabric parts should be washed and dried at a warm (100°F/40°C) setting. Use mild detergent. Rinse well. Disinfect frame and fabric with a commercial disinfectant, or a solution of up to 10% bleach. Rinse well. The straps with hook and loop closures may be laundered. Engage the closures before washing. Do not iron.Excessive use of bleach and high temperatures may damage the fabric. Do not iron.Tub stand, shower stand, tub transfer base and frame parts may be cleaned using normal cleaning products. Casters will give the best performance if cleaned regularly by spraying from underneath with a high-pressure water hose. Do not use chemicals or lubricants.Warranty statementIf a Rifton product breaks or fails in service during the fi rst year, we will replace itfree of charge.Materials• Steel hardware items (nuts, bolts, screws, etc) are stainless steel.• Fabric is a polyester knit, cushioned with polyester spacer fabric, with nylon hook andloop fasteners.• Frames are made with powder-coated aluminum.• Plastic components are typically injection molded from a variety of industrial resins.All materials are latex, lead and phthalates free.User modifi cationsTo prevent serious injury or death, do not modify or alter Riftonin conjunction with products from other manufacturers. Rifton does not accept responsibility for any modifi cations or alterations made to our components orproducts after they leave our premises. Customers modifying or altering ourcomponents or products, or using them in conjunction with products from othermanufacturers, do so at their own risk.15ZC24 ECO3504 Revision01 Find letters of medical necessityand more information at:/wave16。
Futaba S3010参数说明Futaba S3010参数说明2011-04-13 21:22黑线( 接地) , 红线( 电源线) 和白色(控制线)。
以下为Futaba S3010的参数说明:S表示舵机,3表示它用的是三级马达,0表示是泛用型,10是指此舵机为模拟电路控制舵机。
舵机S3010 技术规格规格, 舵机, 技术整体介绍: 主用途通用伺服器特征低成本,高扭矩基板 S256马达 Tricore GM1510VR TR133-15其他 MATAL 轴承,引线长 300mm,HORND 寸法(L×W×H) 40.0×20×38.1 [mm]重量 41 [g]消费电流: 停止时 MAX 15 [mA](无负荷)(4.8V 时) 动作时 130 + 25 [mA](无负荷)消费电流: 停止时 MAX 15 [mA](无负荷)(参考值:6.0V 时) 动作时 145 + 30 [mA](无负荷)输出扭矩: 6.0V 时 6.5 + 1.3 [ Kg.cm]动作速度 6.0V 时 0.16 + 0.02 [Sec/60 度](以下数据说明了当S3010:高电平为1520us时:一定为中间位置;高电平为920us时:一定为最左边位置;高电平为2120us时:一定为最右边位置;这些数据说明了该舵机的转角只与高电平脉宽有关,与占空比无关。
)动作方向: CW pulse 窄(1520 → 920 [us]) CCW pulse 宽(1520 → 2120 [us])动作角度: CW 60 + 10 [度]CCW 60 + 10 [度]左右差 MAX 10 [度]dead Band: 6 + 3 us( 除去自动检查夹具) 静电耐量: 接触 8KV 以上Backlash: MAX 0.7 [度]晃动量: MAX 0.3 [mm]摆动: MAX 1 [回]/600 [us]微动,不灵敏带: 动作速度 100ms/度,不在动作范围使用电压范围: 4.0 ~ 6.0 [V]使用温度范围: -10 ~ + 45[℃]保存温度范围: -20 ~ + 60[℃]其他: 非指定时之测量电压 = 4.8 [V]幅率 = 14.25[mS]数字舵机与模拟舵机数字舵机与模拟舵机数字舵机与模拟舵机_控制方法与性能比较之二(我觉得你应该看看)数码舵机常见问题原理分析及解决:一、数码舵机与模拟舵机的区别传统模拟舵机和数字比例舵机(或称之为标准舵机)的电子电路中无MCU微控制器,一般都称之为模拟舵机。
老式模拟舵机由功率运算放大器等接成惠斯登电桥,根据接收到模拟电压控制指令和机械连动位置传感器(电位器)反馈电压之间比较产生的差分电压,驱动有刷直流电机伺服电机正/反运转到指定位置。
数字比例舵机是模拟舵机最好的类型,由直流伺服电机、直流伺服电机控制器集成电路(IC),减速齿轮组和反馈电位器组成,它由直流伺服电机控制芯片直接接收PWM(脉冲方波,一般周期为20ms,脉宽1~2 ms,脉宽 1 ms为上限位置, 1.5ms为中位,2ms 为下限位置)形式的控制驱动信号,迅速驱动电机执行位置输出,直至直流伺服电机控制芯片检测到位置输出连动电位器送来的反馈电压与PWM控制驱动信号的平均有效电压相等,停止电机,完成位置输出。
数码舵机电子电路中带MCU微控制器故俗称为数码舵机,数码舵机凭借比之模拟舵机具有反应速度更快,无反应区范围小,定位精度高,抗干扰能力强等优势已逐渐取代模拟舵机在机器人、航模中得到广泛应用。
数码舵机设计方案一般有两种:一种是MCU+直流伺服电机+直流伺服电机控制器集成电路(IC)+减速齿轮组+反馈电位器的方案,以下称为方案1,另一种是MCU+直流伺服电机+减速齿轮组+反馈电位器的方案,以下称为方案2。
市面上加装数码驱动板把模拟舵机改数码舵机属方案1。
二、舵机电机调速原理及如何加快电机速度常见舵机电机一般都为永磁直流电动机,如直流有刷空心杯电机。
直流电动机有线形的转速-转矩特性和转矩-电流特性,可控性好,驱动和控制电路简单,驱动控制有电流控制模式和电压控制两种模式。
舵机电机控制实行的是电压控制模式,即转速与所施加电压成正比,驱动是由四个功率开关组成H桥电路的双极性驱动方式,运用脉冲宽度调制(PWM)技术调节供给直流电动机的电压大小和极性,实现对电动机的速度和旋转方向(正/反转)的控制。
电机的速度取决于施加到在电机平均电压大小,即取决于PWM驱动波形占空比(占空比为脉宽/周期的百分比)的大小,加大占空比,电机加速,减少占空比电机减速。
所以要加快电机速度:1、加大电机工作电压;2、降低电机主回路阻值,加大电流;二者在舵机设计中要实现,均涉及在满足负载转矩要求情况下重新选择舵机电机。
三、数码舵机的反应速度为何比模拟舵机快很多模友错误以为:“数码舵机的PWM驱动频率300Hz比模拟舵机的50Hz高6倍,则舵机电机转速快6倍,所以数码舵机的反应速度就比模拟舵机快6倍” 。
这里请大家注意占空比的概念,脉宽为每周期有效电平时间,占空比为脉宽/周期的百分比,所以大小与频率无关。
占空比决定施加在电机上的电压,在负载转矩不变时,就决定电机转速,与PWM的频率无关。
模拟舵机是直流伺服电机控制器芯片一般只能接收50Hz频率(周期20ms)~300Hz左右的PWM外部控制信号,太高的频率就无法正常工作了。
若PWM外部控制信号为50Hz,则直流伺服电机控制器芯片获得位置信息的分辨时间就是20ms,比较PWM控制信号正比的电压与反馈电位器电压得出差值,该差值经脉宽扩展(占空比改变,改变大小正比于差值)后驱动电机动作,也就是说由于受PWM外部控制信号频率限制,最快20ms才能对舵机摇臂位置做新的调整。
数码舵机通过MCU可以接收比50Hz频率(周期20ms)快得多的PWM外部控制信号,就可在更短的时间分辨出PWM 外部控制信号的位置信息,计算出PWM信号占空比正比的电压与反馈电位器电压的差值,去驱动电机动作,做舵机摇臂位置最新调整。
结论:不管是模拟还是数码舵机,在负载转矩不变时,电机转速取决于驱动信号占空比大小而与频率无关。
数码舵机可接收更高频率的PWM外部控制信号,可在更短的周期时间后获得位置信息,对舵机摇臂位置做最新调整。
所以说数码舵机的反应速度比模拟舵机快,而不是驱动电机转速比模拟舵机快。
四、数码舵机的无反应区范围为何比模拟舵机小根据上述对模拟舵机的分析可知模拟舵机约20ms才能做一次新调整。
而数码舵机以更高频率的PWM驱动电机。
PWM 频率的加快使电机的启动/停止,加/减速更柔和,更平滑,更有效的为电机提供启动所需的转矩。
就象是汽车获得了更小的油门控制区间,则启动/停止,加/减速性能更好。
所以数码舵机的无反应区比模拟舵机小。
五、模拟舵机加装数码舵机驱动板并未提升反应速度根据以上分析可知,模拟舵机加装数码舵机驱动板,要提升反应速度,PMW外部控制信号(如陀螺仪送来的尾舵机信号)的频率必须加快,如果还是50Hz,那舵机反应速度当然就没提升了。
六、如何选择舵机电机舵机电机按直流伺服电机的标准选用,根据电机种类、负载力矩、转速、工作电压等要求。
舵机一般都用空心杯电动机,有用有刷的,也有用无刷无感的。
空心杯电动机属于直流永磁、伺服微特电机,与普通电机的主要区别采用是无铁芯转子,也叫空心杯型转子。
具有以下优势:1、最大的能量转换效率(衡量其节能特性的指标):其效率一般在70%以上,部分产品可达到90%以上(普通铁芯电机在15-50%);2、激活、制动迅速,响应极快:机械时间常数小于28毫秒,部分产品可以达到10毫秒以内,在推荐运行区域内的高速运转状态下,转速调节灵敏;3、可靠的运行稳定性:自适应能力强,自身转速波动能控制在2%以内;4、电磁干扰少:采用高品质的电刷、换向器结构,换向火花小,可以免去附加的抗干扰装置;5、能量密度大:与同等功率的铁芯电机相比,其重量、体积减轻1/3-1/2;转速-电压、转速-转矩、转矩-电流等对应参数都呈现标准的线性关系。
七、如何选择舵机反馈电位器舵机反馈电位器按种类、精度,耐用性的标准选用,导电塑料电位器的精度和耐磨程度大大优于其他如线绕电位器类型。
八、舵机控制死区、滞环、定位精度、输入信号分辨率、回中性能的认识每一个闭环控制系统由于信号的振荡等原因,输入信号和反馈信号不可能完全相等,这就涉及到控制死区和滞环的问题,系统无法辨别输入信号和反馈信号的差异范围就是控制死区范围。
舵机自动控制系统由于信号震荡、机械精度等原因造成控制系统在控制死区范围外的小范围老是做调整,为使舵机在小范围内不对震荡做调整,这就需要引入滞环的作用了。
滞环比控制死区大,一般控制死区范围为±0.4%,滞环可设置为±2%,输入信号和反馈信号的差值在滞环内电机不动作,输入信号和反馈信号的差值进入滞环,电机开始制动-停止。
定位精度取决于舵机系统的整体精度:如控制死区、机械精度、反馈电位器精度、输入信号分辨率。
输入信号分辨率指舵机系统对输入信号最小分辨范围,数码舵机输入信号分辨率大大优于模拟舵机。
回中性能取决于滞环和定位精度。
原创文章:"/bbs/viewthread.php?tid=2673&extra=page=1"。