库卡kuka编程
- 格式:pptx
- 大小:4.19 MB
- 文档页数:41
![KUKA机器人编程手册[4]](https://uimg.taocdn.com/fd2af613657d27284b73f242336c1eb91a37338b.webp)
KUKA机器人编程手册KUKA编程手册一、概述二、系统的结构和功能2.1 技术入门机械系统:的物理结构,包括关节、连杆、末端执行器等,决定了的运动范围和能力。
传感系统:的感知部分,包括位置、速度、力、温度、视觉等传感器,用于获取自身或环境的信息。
控制系统:的核心部分,包括控制柜、电源、通信接口等,用于控制的运动和行为。
编程系统:的软件部分,包括操作系统、应用软件、编程语言等,用于设定的任务和逻辑。
2.2 库卡的机械系统基座:固定在地面或其他平台上,支撑整个结构。
A1轴:位于基座上方,控制整个机械臂的水平旋转。
A2轴:位于A1轴上方,控制整个机械臂的垂直旋转。
A3轴:位于A2轴上方,控制中间连杆的垂直旋转。
A4轴:位于A3轴上方,控制末端连杆的水平旋转。
A5轴:位于A4轴上方,控制末端连杆的垂直旋转。
A6轴:位于A5轴上方,控制末端执行器(如夹具、焊枪等)的水平旋转。
2.3 控制系统(V)KR C4高性能:采用多核处理器和实时操作系统,实现高速、高精度和高稳定性的运动控制。
高集成:集成了电源、安全、通信、诊断等功能模块,实现了紧凑、简洁和易维护的设计。
高兼容:支持多种总线和接口标准,如EtherCAT、EtherNet/IP、PROFINET等,实现了与不同厂商和设备的无缝连接。
高扩展:支持多种扩展模块和选件,如外部轴、视觉系统、力控系统等,实现了多样化和定制化的应用需求。
2.4 KUKA smartPAD易用:采用触摸屏和按键的组合方式,实现了直观、方便和快捷的操作体验。
明晰:采用高分辨率和高亮度的显示屏,实现了清晰、鲜艳和易读的显示效果。
强大:集成了多种功能和模式,如手动、自动、编程、诊断等,实现了全面、灵活和高效的控制。
三、的操作和编程3.1 KUKA.ControlStudio软件统一:采用统一的软件平台,实现了控制系统和KUKA smartPAD的一致性和互操作性。
简洁:采用简洁的用户界面,实现了清晰、易懂和易用的操作指引。
![KUKA机器人编程手册[5]](https://uimg.taocdn.com/09edab0ca22d7375a417866fb84ae45c3a35c256.webp)
KUKA机器人编程手册KUKA编程手册一、概述KUKAControlStudio是一个用于开发和运行程序的软件平台,它支持多种编程语言和接口,包括MC-Basic、C、Python、ROS等。
KUKA ControlStudio可以在Windows或Linux操作系统上运行,可以通过网线或无线网络与控制器进行通信。
KUKAControlStudio提供了一个图形化的用户界面,可以方便地创建、编辑、调试和管理程序。
KUKAControlStudio还提供了一个软件开发工具包(SDK),可以用于开发自定义的应用程序和扩展功能。
二、安装和启动要使用KUKAControlStudio,您需要先并安装相应的软件包。
您可以从库卡中心¹获取最新版本的KUKAControlStudio软件包,以及相关的操作系统和应用软件手册¹。
安装过程根据不同的操作系统和硬件配置可能有所不同,请参考手册中的详细说明。
安装完成后,您可以通过双击桌面上的快捷方式或从开始菜单中选择KUKAControlStudio来启动软件。
启动后,您会看到一个欢迎界面,显示了一些常用的选项,如创建新项目、打开现有项目、连接等。
您也可以从菜单栏或工具栏中选择相应的功能。
三、连接要使用KUKAControlStudio编写和运行程序,您需要先与控制器建立连接。
您可以通过网线或无线网络来实现连接,但需要确保您的电脑和控制器处于同一局域网内,并且设置了正确的IP地址。
在控制柜上打开电源开关,并等待系统启动完成。
在控制柜上找到一个带有显示屏和按键的模块,这是控制器的用户界面。
在用户界面上按下菜单键(M),然后选择“设置”(S)。
在设置菜单中选择“网络”(N),然后选择“IP地址”(I)。
在IP地址菜单中输入您想要设置的IP地址,例如192.168.1.100,并按下确认键(O)。
在用户界面上按下返回键(R),直到回到主菜单。
在电脑上打开控制面板,并选择“网络和共享中心”。
KUKA机器人专家编程随着科技的飞速发展,机器人技术已经深入到我们生活的各个领域。
在众多机器人技术中,KUKA机器人以其卓越的性能和广泛的应用领域脱颖而出,成为业界的佼佼者。
掌握KUKA机器人编程技术,将使大家成为驾驭未来技术的先驱。
一、KUKA机器人简介KUKA机器人是一家德国公司,以其精准、高效、灵活的机器人技术闻名于世。
KUKA机器人在汽车制造、航空航天、医疗护理等领域有着广泛的应用,其卓越的性能和稳定性赢得了全球用户的赞誉。
二、KUKA机器人编程的优势1、精确控制:KUKA机器人编程可以实现对机器人的精确控制,包括位置、速度、加速度等参数,从而实现高精度的加工和操作。
2、高效执行:KUKA机器人的编程语言具有高效的特点,可以使机器人在短时间内处理大量数据,缩短作业时间,提高生产效率。
3、灵活性强:KUKA机器人的编程语言具有良好的灵活性,可以适应不同的应用场景和需求,实现多样化的功能。
4、易于学习:KUKA机器人的编程语言易于学习,即使没有编程经验的人也可以快速上手。
同时,KUKA公司还提供了丰富的培训资料和在线支持,帮助用户快速掌握编程技巧。
三、如何学习KUKA机器人编程1、学习基础知识:了解机器人基本原理、数学基础(线性代数、矩阵运算等)以及基本的控制理论。
2、选择合适的编程语言:KUKA机器人支持多种编程语言,如C++、Python等,根据个人兴趣和需求选择合适的语言进行学习。
3、实践操作:通过实践操作来加深对理论知识的理解,可以借助KUKA 机器人实验平台进行实验,掌握机器人的基本操作和编程技巧。
4、参加培训课程:参加KUKA公司或其他培训机构提供的培训课程,可以系统地学习机器人技术和编程技巧。
5、参与社区交流:加入KUKA机器人社区,与其他用户交流经验、分享心得,共同提高技术水平。
四、总结掌握KUKA机器人编程技术是驾驭未来技术的先驱。
通过学习KUKA机器人编程,大家将能够灵活地运用机器人在各个领域中实现自动化和智能化,为未来的科技发展做好准备。
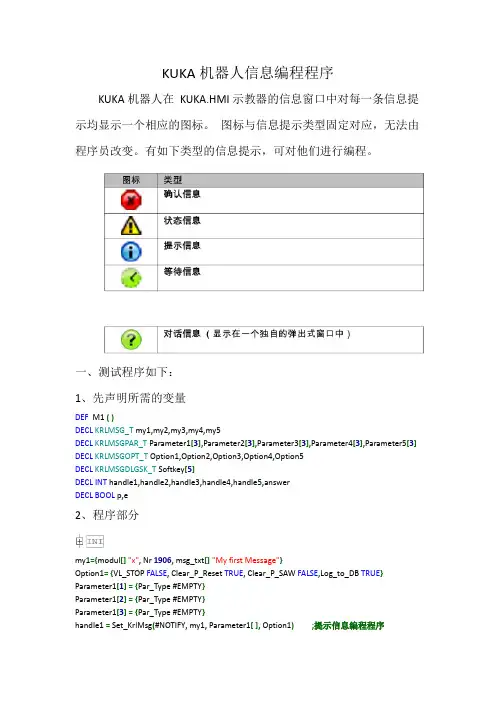
KUKA机器人信息编程程序KUKA机器人在KUKA.HMI示教器的信息窗口中对每一条信息提示均显示一个相应的图标。
图标与信息提示类型固定对应,无法由程序员改变。
有如下类型的信息提示,可对他们进行编程。
一、测试程序如下:1、先声明所需的变量DEF M1 ()DECL KRLMSG_T my1,my2,my3,my4,my5DECL KRLMSGPAR_T Parameter1[3],Parameter2[3],Parameter3[3],Parameter4[3],Parameter5[3] DECL KRLMSGOPT_T Option1,Option2,Option3,Option4,Option5DECL KRLMSGDLGSK_T Softkey[5]DECL INT handle1,handle2,handle3,handle4,handle5,answerDECL BOOL p,e2、程序部分my1={modul[]"x", Nr 1906, msg_txt[]"My first Message"}Option1={VL_STOP FALSE, Clear_P_Reset TRUE, Clear_P_SAW FALSE,Log_to_DB TRUE} Parameter1[1]={Par_Type #EMPTY}Parameter1[2]={Par_Type #EMPTY}Parameter1[3]={Par_Type #EMPTY}handle1 = Set_KrlMsg(#NOTIFY, my1, Parameter1[], Option1) ;提示信息编程程序IF $in[17]==FALSE THENmy2={modul[]"x", Nr 1909, msg_txt[]"My Messagetext"}Option2={VL_STOP FALSE, Clear_P_Reset TRUE, Clear_P_SAW FALSE,Log_to_DB TRUE} Parameter2[1]={Par_Type #EMPTY}Parameter2[2]={Par_Type #EMPTY}Parameter2[3]={Par_Type #EMPTY}handle2 = Set_KrlMsg(#STATE, my2, Parameter2[], Option2)ENDIFe=FALSEREPEATIF $in[17]==TRUE THENe=Clear_KrlMsg(handle2)ENDIFp=Exists_KrlMsg(handle2); D?UNTIL NOT(p)or e ;状态信息编程程序my3={modul[]"x", Nr 1910, msg_txt[]"My Messagetext"}Option3={VL_STOP FALSE, Clear_P_Reset TRUE, Clear_P_SAW FALSE,Log_to_DB TRUE} Parameter3[1]={Par_Type #EMPTY}Parameter3[2]={Par_Type #EMPTY}Parameter3[3]={Par_Type #EMPTY}handle3 = Set_KrlMsg(#QUIT, my3, Parameter3[], Option3)REPEATp=Exists_KrlMsg(handle3)UNTIL NOT(p) ;确认信息编程程序IF $IN[17]==FALSE THENmy4={modul[]"x", Nr 1911, msg_txt[]"My Messagetext"}Option4={VL_STOP FALSE, Clear_P_Reset TRUE, Clear_P_SAW FALSE,Log_to_DB TRUE} Parameter4[1]={Par_Type #EMPTY}Parameter4[2]={Par_Type #EMPTY}Parameter4[3]={Par_Type #EMPTY}handle4 = Set_KrlMsg(#WAITING, my4, Parameter4[], Option4)ENDIFe=FALSEREPEATIF $IN[17]==TRUE THENe=Clear_KrlMsg(handle4)ENDIFp=Exists_KrlMsg(handle4)UNTIL NOT(p)or e ;等待信息编程程序IF $IN[17]==FALSE THENmy5={modul[]"x", Nr 1912, msg_txt[]"My Questiontext"}Option5={VL_STOP FALSE, Clear_P_Reset TRUE, Clear_P_SAW FALSE, Log_to_DB TRUE} Parameter5[1]={Par_Type #EMPTY}Parameter5[2]={Par_Type #EMPTY}Parameter5[3]={Par_Type #EMPTY}softkey[1]={sk_type #value, sk_txt[]"key1"}softkey[2]={sk_type #value, sk_txt[]"key2"}softkey[3]={sk_type #value, sk_txt[]"key3"}softkey[4]={sk_type #value, sk_txt[]"key4"}softkey[5]={sk_type #value, sk_txt[]"key5"};handle5 = Set_KrlMsg(#STATE, my5, Parameter5[ ], Option5)ENDIF;e=FALSE;REPEAT;IF $IN[17]==TRUE THEN;e=Clear_KrlMsg(handle5);ENDIF;p=Exists_KrlMsg(handle5);UNTIL NOT(p) or ehandle5 = Set_KrlDlg(my5, Parameter5[],Softkey[], Option5)answer=0REPEATp = exists_KrlDlg(handle5 ,answer)UNTIL NOT(p)SWITCH answerCASE1$FLAG[1]=TRUECASE2$FLAG[2]=TRUECASE3$FLAG[3]=TRUECASE4$FLAG[4]=TRUECASE5$FLAG[5]=TRUEENDSWITCH ;对话信息编程程序END。
KUKA机器人编程手册KUKA编程手册一、概述机械臂:由多个关节和连杆构成,可以在空间中进行多自由度的运动。
控制柜:包含电源模块、驱动模块、控制模块等,负责为机械臂提供电力和信号,并执行用户编写的程序。
操作面板:也称为KCP(KUKA ControlPanel),是一种手持式的触摸屏设备,可以用于控制的开关、模式切换、手动移动、程序编辑等功能。
外部设备:根据不同的应用场景,可以连接各种外部设备,如传感器、执行器、通信接口等,以实现更复杂的功能和交互。
二、学习手动移动在开始编程之前,需要先了解如何使用操作面板来手动移动。
手动移动有助于熟悉的运动范围和特性,以及检查的状态和故障。
手动移动的步骤如下:1. 打开控制柜的电源开关,并等待系统启动完成。
2.在操作面板上选择“T1”模式(也称为“测试”模式),并按下“确认”键。
3. 在操作面板上选择“手动”模式,并按下“确认”键。
4.在操作面板上选择“轴”模式或“笛卡尔”模式,并按下“确认”键。
轴模式下,可以分别控制每个关节的旋转角度;笛卡尔模式下,可以控制末端执行器的位置和姿态。
5.在操作面板上按住“死人开关”,并使用方向键或摇杆来移动。
注意观察的运动情况,避免碰撞或超出限位。
6.在操作面板上按下“停止”键,可以停止的运动,并锁定当前位置。
三、项目配置在开始编程之前,需要先配置项目的相关参数,如的IP地址、电脑和的连接方式、项目的名称和位置等。
项目配置的步骤如下:1.设置的IP地址。
在操作面板上选择“设置”菜单,并进入“网络设置”子菜单。
在此处可以查看或修改的IP地址、子网掩码、网关等信息。
一般情况下,建议将的IP地址设置为192.168.0.1,以便于与电脑进行通信。
2.电脑和通过网线连接。
将一根网线的一端插入控制柜后面的以太网接口,另一端插入电脑的网卡接口。
在电脑上设置网络连接的属性,将I P地址设置为192.168.0.2,子网掩码设置为255.255.255.0,网关设置为192.168.0.1。
KUKA机器人操作与编程手册简介KUKA机器人是德国KUKA机器人公司(KULG)生产的工业机器人。
它们被广泛应用于汽车制造、电子制造、建筑等各个领域。
本手册旨在为初学者提供一些关于KUKA机器人操作和编程的基础知识。
操作手册1. KUKA机器人的启动和关闭KUKA机器人的启动和关闭是使用KUKA KR C4控制器进行操作的。
下面是启动和关闭机器人的步骤:1.打开控制器电源2.使用控制器上的开关将机器人系统启动3.等待机器人系统自检完成4.通过控制器进行机器人的操作5.关闭机器人系统前,确保机器人处于安全位置6.使用控制器上的开关关闭机器人系统2. 机器人的基本移动KUKA机器人具有多种不同类型的运动,包括直线运动、旋转运动和关节运动。
下面是一些基本的机器人移动指令示例:•直线运动:LIN X100 Y100 Z100 A45 B45 C45•旋转运动:CIRC P100 P200 R50•关节运动:JNT J1=90 J2=453. 机器人编程语言KUKA机器人使用KRL(KUKA Robot Language)作为其编程语言。
KRL是一种结构化编程语言,类似于C或Pascal。
下面是一个简单的KRL程序示例:DEF myProgram()DECL int iDECL bool conditioni = 0condition = trueWHILE condition DOINC iIF i == 10 THENcondition = falseENDIFENDWHILEENDDEF4. 机器人的传感器和反馈KUKA机器人可以配备各种传感器,以便实时监测机器人的状态和周围环境的信息。
一些常见的传感器包括力传感器、视觉传感器和温度传感器。
通过这些传感器,机器人可以感知和适应外部环境的变化。
5. 机器人的安全措施在操作KUKA机器人时,安全是至关重要的。
以下是一些常见的机器人安全措施:•确保机器人周围没有障碍物•执行安全风险评估,并根据评估结果制定相应的操作计划•对机器人进行定期维护和检查,确保其正常运行•使用必要的个人防护设备,例如手套和护目镜结论本手册提供了初学者入门KUKA机器人操作和编程的基本知识。
库卡KUKA编程词汇手册本文档为库卡KUKA编程词汇手册,旨在为用户提供详细的编程词汇解释和用法示例。
请注意,本手册仅涵盖了一般常用的编程词汇,以供参考使用。
1、基础概念1.11.2 控制器1.3 关节1.4 末端执行器1.5 工具坐标系1.6 基坐标系1.7 工具1.8用户坐标系1.9运动学2、术语解释2.1 动作2.2 指令2.3 程序2.4 子程序 2.5 过程2.6 变量2.7 数组2.8参数2.9循环2.10 条件2.11 调用3、语法及关键词 3.1 数据类型 3.2 变量声明 3.3 运算符 3.4 控制语句 3.5 函数调用 3.6 数组操作 3.7 时间延迟3.8逻辑判断3.9导入/导出数据3.10 异常处理4、运动指令4.1 直线运动4.2 圆弧运动4.3 关节运动4.4 面运动4.5 入口/出口点 4.6 工具偏置4.7 坐标偏置4.8轴承方位偏置5、输入/输出5.1 信号5.2 IO口5.3 数字输入/输出 5.4 模拟输入/输出5.5 通信接口5.6 数据输入/输出5.7 编码器读取6、传感器6.1 触摸传感器6.2 光电传感器6.3 距离传感器6.4 位置传感器6.5 力传感器6.6 视觉传感器7、程序控制7.1 程序调用7.2 条件判断7.3 循环控制7.4 异常处理7.5 事件触发7.6 示教器控制8、实例应用8.1 自动化生产线8.2 装配8.3 焊接8.4 喷涂8.5 搬运附件:1、KUKA编程示例文件2、KUKA操作指南附录:法律名词及注释1、版权法:保护作者对其作品的独占权利,禁止未经授权的复制、发行、展示和演绎。
2、商标法:保护商标的独占性,禁止未经授权的商标使用和侵权行为。
3、专利法:保护发明的独占权利,禁止未经授权的制造、销售和使用。
4、知识产权法:保护创造性劳动成果的独占权利,包括版权、商标权、专利权等。
本文档涉及附件请参见附件部分,若有疑问请联系相关部门或专业人士进行咨询。
![KUKA机器人编程手册[2]](https://uimg.taocdn.com/d37200c2951ea76e58fafab069dc5022aaea4694.webp)
KUKA机器人编程手册KUKA编程手册一、系统简介1.1 系统组成本体:由机械臂、电动机、传感器、电缆等组成,负责执行物理运动。
控制柜:包含电源模块、驱动模块、控制模块、通信模块等,负责控制和监测的运行状态。
操作面板:提供了一个触摸屏和一些按键,用于与进行交互和操作。
外部设备:根据不同的应用场景,可以连接一些外部设备,如工具、传送带、视觉系统等,以实现更复杂的功能。
1.2 操作系统实时内核:负责处理与运动相关的实时任务,如轨迹规划、运动控制、碰撞检测等。
用户界面:负责提供一个图形化的用户界面,让用户可以通过操作面板或者远程终端来访问和操作系统。
应用软件:负责提供一些预定义或者自定义的应用软件,让用户可以根据不同的需求来配置和使用系统。
1.3 应用软件KUKA.ControlStudio:是一个集成开辟环境(IDE),让用户可以使用图形化或者文本化的方式来编写和调试程序。
KUKA.PC.API:是一个应用程序接口(API),让用户可以使用C或者其他.NET语言来开辟基于PC的远程控制或者监控应用程序。
KUKA.MC-Basic:是一种基于文本的编程语言,让用户可以使用类似于BASIC语言的语法来编写和运行程序。
二、学习手动挪移在开始编写和运行程序之前,需要先学习如何手动挪移。
手动移动有助于熟悉的结构和运动范围,以及检查是否正常工作²。
2.1 启动和住手要启动或者住手,需要使用操作面板上的开关键²:自动模式:在自动模式下,会根据预设的程序自动运行,不需要用户干预。
这种模式合用于正式的生产环境。
手动模式:在手动模式下,会根据用户的操作进行挪移,不会执行任何程序。
这种模式合用于学习和调试的目的。
住手键:按下住手键后,会即将住手运动,并进入待机状态。
如果浮现故障或者危(wei)险情况,可以随时按下住手键来紧急住手。
2.2 使用操作杆挪移要使用操作杆挪移,需要先将操作面板上的启动模式切换到手动模式²。
![KUKA机器人编程手册[6]](https://uimg.taocdn.com/f7d5cf376d85ec3a87c24028915f804d2a16874e.webp)
KUKA机器人编程手册KUKA编程手册一、KUKA基本概念1.1 什么是KUKA?KUKA是由德国库卡公司(KUKAAG)生产的一系列工业,广泛应用于汽车、航空、电子、医疗、消费品等行业的生产和制造过程中。
KUKA具有高精度、高速度、高灵活性、高可靠性等特点,能够满足各种复杂和多变的工作需求。
1.2 KUKA的组成部分机械臂:机械臂是KUKA的主体部分,由若干个关节和连杆构成,能够在空间中进行多自由度的运动。
机械臂的末端可以安装不同的工具或夹具,以适应不同的工作任务。
控制柜:控制柜是KUKA的核心部分,负责对机械臂进行电气和逻辑控制。
控制柜内部安装了操作系统、应用软件、驱动器、电源等模块,以及与外部设备通信的接口。
操作面板:操作面板是KUKA的交互部分,用于对进行设置、编程、调试和运行等操作。
操作面板上有显示屏、按键、旋钮等元件,以及与控制柜连接的数据线。
安全设备:安全设备是KUKA的保护部分,用于防止发生故障或异常情况时造成危害。
安全设备包括紧急停止按钮、安全门、安全光栅、碰撞检测等。
二、KUKA操作系统2.1 KUKA.ControlStudio2.2 KUKA.ControlStudio主要功能项目管理:项目管理模块用于创建和管理KUKA的项目文件,包括程序文件、数据文件、配置文件MODULE 模块名声明部分语句部分ENDMODULEVAR INT a;VAR REAL b;VAR BOOL c;VAR CHAR d;VAR STRING e;VAR ENUM {red, green, blue} f; VAR STRUCT {INT x; REAL y;} g; VAR ARRAY [1..10] OF INT h; VAR POINTER TO REAL i;a := 10;b := 3.14;c := TRUE;d := 'A';e := "Hello";f := red;g.x := 1;g.y := 2.0;h[1] := 100;i := ADR(b);a := a + 1;b := b * 2.0;c := NOT c;d := TO_CHAR(65);e := e + " World";f := TO_ENUM(1);g.x := g.x 1;g.y := g.y / 2.0;h[1] := h[1] * 10;i := DREF(i);PTP {X 100, Y 200, Z 300} C_PTP; -点对点运动到绝对坐标(100,200,300)LIN REL {X -50, Y -50, Z -50} C_DIS; -直线运动到相对坐标(-50,-50,-50)CIRC {KUKA编程手册一、概述KUKAControlStudio是一个基于Windows的软件平台,用于开发和执行程序。
KUKA机器人编程手册KUKA编程手册一、概述二、系统组成本体:本体是由多个关节和连杆构成的可移动结构,它可以在空间中执行各种运动。
本体上还安装了各种传感器和执行器,用于控制和监测的状态。
控制柜:控制柜是系统的核心部分,它包含了的控制器、电源、驱动器、通讯模块等硬件设备。
控制柜负责接收和处理来自操作员或外部设备的指令,以及向本体发送控制信号。
操作面板:操作面板是系统的人机交互界面,它可以通过有线或无线方式与控制柜连接。
操作面板上有显示屏、按键、开关、指示灯等组件,用于显示和输入的相关信息和参数。
外部设备:外部设备是指与系统相连的其他设备,例如工具、夹具、传送带、视觉系统等。
外部设备可以通过数字或模拟信号、以太网、总线等方式与控制柜通讯,实现与的协同作业。
三、操作3.1 启动和停止启动:在控制柜上按下启动按钮,控制柜将进入就绪状态,并向操作面板发送启动信号。
在操作面板上按下确认按钮,控制柜将进入运行状态,并向本体发送使能信号。
此时,可以接收并执行指令。
停止:在操作面板上按下停止按钮,控制柜将进入停止状态,并向本体发送停止信号。
此时,将停止当前的运动,并保持当前的位置。
在控制柜上按下停止按钮,控制柜将进入关闭状态,并断开与操作面板和外部设备的通讯。
3.2 模式切换自动模式:自动模式是系统的正常工作模式,也是最常用的模式。
在自动模式下,可以自动执行存储在控制柜中的程序,并根据程序中的逻辑和条件进行判断和分支。
自动模式下,操作员只能通过操作面板上的启动、停止、暂停等按钮控制的运行,不能通过手动移动的方式进行操作。
手动模式:手动模式是系统的调试和维护模式,也是编程的基础模式。
在手动模式下,可以通过操作面板上的方向键或手轮进行手动移动,也可以通过操作面板上的其他按钮进行参数设置、程序编辑、故障诊断等操作。
手动模式下,的运行速度受到限制,以保证操作员的安全。
外部模式:外部模式是系统的扩展模式,用于与外部设备进行协同作业。
KUKA机器人编程手册KUKA编程手册一、概述二、结构机械臂:机械臂是的主体部份,由多个关节和连杆组成,可以在空间中进行多自由度的运动。
机械臂的末端可以安装不同的工具或者末端执行器,以适应不同的应用场景。
控制柜:控制柜是的控制中心,包含了电源模块、驱动模块、通信模块、安全模块等,负责为机械臂提供电力和信号,并与外部设备进行数据交换。
操作面板:操作面板是的人机交互界面,由触摸屏和按键组成,可以显示的状态信息、参数设置、故障诊断等,并提供手动操作和编程的功能。
软件系统:软件系统是的核心部份,包含了操作系统、应用软件、编程语言等,决定了的功能和性能。
KUKA使用了专门开辟的KUKA.Co ntrolStudio作为操作系统,支持多种应用软件和编程语言。
三、编程语言MC-Basic:MC-Basic是一种基于文本的编程语言,类似于C语言,可以实现对运动和逻辑控制的精确描述。
MC-Basic支持变量、数据类型、运算符、函数、流程控制等基本语法元素,并提供了一系列专门针对控制的指令和函数。
KRL:KRL是一种基于文本的编程语言,类似于Pascal语言,可以实现对运动和逻辑控制的简洁描述。
KRL支持变量、数据类型、运算符、函数、流程控制等基本语法元素,并提供了一系列专门针对控制的指令和函数。
PC-API:PC-API是一种基于对象的编程接口,可以通过C或者C++等高级语言,在PC端对进行远程控制。
PC-API提供了一系列封装了功能的类和方法,并支持事件驱动和异步通信等特性。
四、操作系统系统管理:系统管理是操作系统的基础功能,负责的启动、关闭、重启、更新、配置、备份、恢复等操作,并提供了一系列的系统工具和设置选项。
程序管理:程序管理是操作系统的核心功能,负责的编程、编辑、调试、运行、住手、暂停、恢复等操作,并提供了一系列的程序工具和设置选项。
设备管理:设备管理是操作系统的扩展功能,负责与外部设备的连接、通信、控制等操作,并提供了一系列的设备工具和设置选项。
KUKA机器人编程手册KUKA编程手册一、概述采用模块化设计,可根据不同的应用需求选择不同的型号、负载、工作半径和控制柜等组件。
采用先进的控制技术,可实现多种运动模式,如点对点运动、连续路径运动、外部轴运动等。
采用灵便的编程方式,可通过手持式操作装置(KUKA smartPAD)、PC软件(KUKA.ControlStudio)或者自定义接口(KUKA.PC .API)进行编程。
采用标准化的通信协议,可与其他设备或者系统进行数据交换和协同控制,如以太网(Ethernet)、现场总线(Fieldbus)、工业以太网(Industrial Ethernet)等。
采用丰富的软件功能,可实现多种功能和优化,如安全功能(Safe Operation)、碰撞检测(CollisionDetection)、能量管理(Energy Management)等。
二、学习手动挪移在开始编程之前,需要先了解如何手动挪移。
手动挪移是指通过手持式操作装置(KUKAsmartPAD)上的按键或者触摸屏来控制的位置和姿态。
手动挪移有助于熟悉的结构和运动范围,以及设置的坐标系和工具参数。
显示的状态信息,如电源状态、错误信息、警告信息等。
设置的操作模式,如自动模式(AUT)、外部模式(EXT)、T1模式(T1)、T2模式(T2)等。
设置的速度级别,如百分比速度(%VEL)、最大速度(MAX VEL)、最小速度(MIN VEL)等。
设置的运动模式,如关节坐标系运动(AXIS)、笛卡尔坐标系运动(CART)、基坐标系运动(BASE)、工具坐标系运动(TOOL)等。
设置的坐标系和工具参数,如基坐标系(BASEDATA)、工具坐标系(TOOL DATA)、用户坐标系(USER FRAME)等。
编辑和执行程序,如创建程序(NEW PGM)、打开程序(OPEN PGM)、保存程序(SAVE PGM)、运行程序(RUN PGM)等。
1. 打开控制柜电源,并等待系统启动完成。
KUKA机器人编程手册KUKA编程手册一、概述二、学习手动挪移在开始编程之前,用户需要了解如何手动挪移,以便对的运动范围、速度和方向有一个直观的感受。
手动挪移的步骤如下:1. 打开控制柜的电源开关,等待系统启动完成。
2. 在控制柜上选择“手动”模式,并按下“启动”按钮。
3.在操作面板上选择“轴”模式或者“空间”模式,根据需要调整速度百分比。
4.在操作面板上按住“死人开关”,并使用方向键或者摇杆来挪移的各个关节或者末端执行器。
5.在挪移过程中,注意观察的实际位置和目标位置,以及各个关节的角度和转速,避免发生碰撞或者超出极限。
6.在挪移完成后,松开“死人开关”,并将控制柜切换回“自动”模式。
三、项目配置在开始编程之前,用户需要对项目进行配置,以便将电脑和通过网线连接,并设置相关的参数和选项。
项目配置的步骤如下:1. 设置IP地址。
在控制柜上打开KUKA.ControlStudio软件³,并进入“设置”菜单。
在“网络”选项卡中,输入一个合适的IP地址(如192.168.0.10),并保存设置。
2.电脑和通过网线连接。
在电脑上安装KUKA.ControlStudio软件³,并进入“设置”菜单。
在“网络”选项卡中,输入一个与IP地址相同网段的IP地址(如192.168.0.11),并保存设置。
然后使用一根网线将电脑和控制柜连接起来。
3. 查找并打开项目。
在电脑上打开KUKA.ControlStudio软件³ ,并进入“文件”菜单。
在“打开项目”选项中,选择一个已经存在的项目或者创建一个新的项目,并“打开”按钮。
4. 项目配置。
在电脑上打开KUKA.ControlStudio软件³,并进入“项目”菜单。
在“配置”选项中,可以设置项目的名称、描述、版本、语言等信息,并保存设置。
5. 项目。
在电脑上打开KUKA.ControlStudio软件³,并进入“文件”菜单。
KUKA编程3(共3册) KUKA编程3(共3册)第一册:基础编程章节一、基础知识1.1 的定义和分类1.2 KUKA概述1.3 各个模块的功能和特点章节二、KUKA编程环境搭建2.1 安装KUKA编程软件2.2 连接KUKA控制器2.3 设置编程环境章节三、运动控制3.1 坐标系和运动学3.2 基础运动指令的使用3.3 运动路径规划和插补控制章节四、的传感器与感知4.1 KUKA的传感器概述4.2 安装和配置传感器4.3 传感器数据的获取和处理第二册:高级编程章节五、高级运动控制5.1 运动轨迹优化技术5.2 增量运动控制和精确定位5.3 力控制和力传感器使用章节六、视觉系统6.1 视觉系统概述6.2 安装和配置视觉系统6.3 视觉检测和定位章节七、KUKA网络通信7.1 网络通信基础知识7.2 KUKA网络连接设置7.3 与外部设备的数据通信第三册:实践案例章节八、案例一、物料搬运8.1 案例需求分析8.2 系统设计和编程实现8.3 测试和优化章节九、案例二、焊接9.1 案例需求分析9.2 系统设计和编程实现9.3 测试和优化章节十、案例三、装配10.1 案例需求分析10.2 系统设计和编程实现10.3 测试和优化附件:1、编程示例代码2、编程教程视频法律名词及注释:1、版权:指对某一创造性工作的独占权,包括文字、图像、音频、视频等。
2、专利:指对发明的独占权,以保护创新和技术发明的权益。
3、商标:指标识和区分商品或服务来源的标识,以保护商业品牌的独占权。