库卡kuka经典编程54737
- 格式:ppt
- 大小:4.17 MB
- 文档页数:41
![KUKA机器人编程手册[4]](https://uimg.taocdn.com/fd2af613657d27284b73f242336c1eb91a37338b.webp)
KUKA机器人编程手册KUKA编程手册一、概述二、系统的结构和功能2.1 技术入门机械系统:的物理结构,包括关节、连杆、末端执行器等,决定了的运动范围和能力。
传感系统:的感知部分,包括位置、速度、力、温度、视觉等传感器,用于获取自身或环境的信息。
控制系统:的核心部分,包括控制柜、电源、通信接口等,用于控制的运动和行为。
编程系统:的软件部分,包括操作系统、应用软件、编程语言等,用于设定的任务和逻辑。
2.2 库卡的机械系统基座:固定在地面或其他平台上,支撑整个结构。
A1轴:位于基座上方,控制整个机械臂的水平旋转。
A2轴:位于A1轴上方,控制整个机械臂的垂直旋转。
A3轴:位于A2轴上方,控制中间连杆的垂直旋转。
A4轴:位于A3轴上方,控制末端连杆的水平旋转。
A5轴:位于A4轴上方,控制末端连杆的垂直旋转。
A6轴:位于A5轴上方,控制末端执行器(如夹具、焊枪等)的水平旋转。
2.3 控制系统(V)KR C4高性能:采用多核处理器和实时操作系统,实现高速、高精度和高稳定性的运动控制。
高集成:集成了电源、安全、通信、诊断等功能模块,实现了紧凑、简洁和易维护的设计。
高兼容:支持多种总线和接口标准,如EtherCAT、EtherNet/IP、PROFINET等,实现了与不同厂商和设备的无缝连接。
高扩展:支持多种扩展模块和选件,如外部轴、视觉系统、力控系统等,实现了多样化和定制化的应用需求。
2.4 KUKA smartPAD易用:采用触摸屏和按键的组合方式,实现了直观、方便和快捷的操作体验。
明晰:采用高分辨率和高亮度的显示屏,实现了清晰、鲜艳和易读的显示效果。
强大:集成了多种功能和模式,如手动、自动、编程、诊断等,实现了全面、灵活和高效的控制。
三、的操作和编程3.1 KUKA.ControlStudio软件统一:采用统一的软件平台,实现了控制系统和KUKA smartPAD的一致性和互操作性。
简洁:采用简洁的用户界面,实现了清晰、易懂和易用的操作指引。
库卡机器人模拟量输入输出编程步骤及方法给模拟输入端编程KR C4 具有32 个模拟输入端为这些模拟信号需要配备可作为选项提供的总线系统,并须通过WorkVisual 进行设计模拟输入端通过系统变量$ANIN[1] ... $ANIN[32] 读出(每隔12 ms 一次)循环读取一个模拟输入端$ANIN[nr] 的值在1.0 和-1.0 之间变化,表示+10V 至-10V 的输入电压函数:静态赋值直接赋值REAL valuevalue = $ANIN[2]给信号协定赋值SIGNAL sensor $ANIN[6]REAL valuevalue = sensor动态赋值所有用于ANIN 指令中的变量必须已在数据列表中进行了声明(局部或在$CONFIG.DAT 中)。
同时最多允许有三个ANIN ON 指令。
最多两个ANIN ON 指令可使用相同的变量值或访问同一个模拟输入端。
句法开始循环读取:ANIN ON 值= 系数* 信号名称偏量示例1:示例2:使用模拟输入端编程时的操作步骤:注意:使用模拟信号的前提条件是设计正确的总线系统及其连接的模拟信号。
ANIN ON /OFF 的编程1. 选择正确的模拟输入端2. 执行信号协定3. 在数据列表中声明必要的变量4. 接通:给ANIN ON 指令编程5. 检查是否最多3 个动态输入端激活6. 关断:给ANIN OFF 指令编程给模拟输出端编程KR C4 具有32 个模拟输出端为这些模拟信号需要配备可作为选项提供的总线系统,并须通过WorkVisual 进行设计模拟输出端通过系统变量$ANOUT[1] ... $ANOUT[32] 读出(每隔12 ms 一次)循环写入一个模拟输出端。
$ANOUT[nr] 的值在1.0 和-1.0 之间变化,表示+10V 至-10V 的输出电注意:最多可同时使用8 个模拟输出端(包括静态和动态)。
ANOUT触发一次预进停止。
静态赋值直接赋值ANOUT[2] = 0.7 ; 在模拟输出端2 上加上7V 电压借助变量赋值REAL valuevalue = -0.8ANOUT[4] = value ; 在模拟输出端4 上加上-8V 电压借助联机表单编程动态赋值所有用于ANOUT 指令中的变量必须已在数据列表中进行了声明(局部或在$CONFIG.DAT 中)。
KUKA机器人初级编程嘿,朋友们!今天咱们来聊聊有趣的 KUKA 机器人初级编程。
我先跟您讲个事儿啊,前几天我去一个科技展览,看到一个小朋友在那摆弄 KUKA 机器人,那专注的模样,真是太可爱了!他就拿着个小电脑,手指在键盘上飞快地敲着代码,眼睛还紧紧盯着机器人的动作,那场面让我一下子就想到了咱们今天要说的主题。
KUKA 机器人编程啊,就像是给机器人赋予了灵魂。
对于初学者来说,就像是打开了一个全新的神秘世界。
想象一下,您能通过自己编写的程序,让这个大家伙按照您的想法动起来,是不是超酷的?咱们先从最基础的开始。
比如说,让机器人向前走几步。
这听起来简单,可实际操作起来,还真有不少讲究。
您得清楚地告诉机器人,每一步走多远,速度是多少。
这就好比您指挥一个小朋友走路,得把要求说得明明白白的。
编程的时候,那些代码就像是机器人能听懂的语言。
可别觉得代码很枯燥,它们就像神奇的咒语,一旦您念对了,机器人就能乖乖听话。
比如说,“MOVEL P1, V1000, Z50, TOOL0”,这一串字符,就是告诉机器人以一定的速度和姿态移动到指定的位置。
再说说控制机器人的手臂动作。
您可以让它抬起、放下、旋转,就像给它编排了一场独特的舞蹈。
有一次,我看到一个学生编的程序,让机器人的手臂模拟了给花朵浇水的动作,那细腻的程度,就好像真的在精心呵护每一朵花。
还有啊,在编程中设置条件判断也很重要。
比如说,当机器人检测到某个物体时,做出不同的反应。
这就像是机器人有了自己的“思考能力”,能根据环境的变化做出合适的动作。
学习 KUKA 机器人初级编程,可不能心急。
得一步一个脚印,就像搭积木一样,一块一块稳稳地往上搭。
有时候可能会遇到一些小挫折,代码出错啦,机器人不听话啦,但别灰心,这都是成长的过程。
您想想,当您经过多次尝试,终于让机器人完美地完成了您设定的任务,那种成就感,简直无与伦比!就像那个在科技展览上的小朋友,当他看到自己编程的机器人按照预想的方式行动时,脸上洋溢的那种自豪和喜悦,真的让人深受感染。
库卡机器人五点循环程序作为一名库卡机器人,我每天都在工厂中辛勤工作。
我的任务是完成一系列的动作来协助人类工作。
为了更好地完成任务,我拥有一个五点循环程序,用于指导我的行动。
下面,我将详细介绍这个循环程序的五个步骤。
第一步,定位。
每次开始工作之前,我都会进行定位操作。
通过使用传感器和摄像头,我能够准确地确定自己的位置,并与工作环境进行沟通。
这样,我就可以在正确的位置上执行任务,避免与其他对象发生碰撞。
第二步,感知。
在执行任务的过程中,我需要不断地感知周围的环境。
我会使用传感器来检测障碍物、物体的位置和状态等信息。
这些感知能力使我能够及时调整动作,以适应不同的工作情况。
第三步,决策。
根据感知到的信息,我会进行决策,确定下一步的动作。
这个过程需要结合预先设定的任务目标和当前环境的实际情况。
通过智能算法的支持,我能够快速做出正确的决策,保证任务的顺利进行。
第四步,执行。
在决策完成后,我会执行相应的动作。
这个过程需要精确的控制和协调能力。
我会根据任务需求,灵活地调整自己的姿态和动作,以完成各项工作。
在执行过程中,我会不断地检查自己的动作,确保其准确无误。
第五步,反馈。
在完成一次动作之后,我会进行反馈。
我会将执行过程中的信息反馈给系统,以便对自己的表现进行评估和改进。
通过不断的反馈和学习,我能够提高自己的工作效率和准确性,更好地满足人类的需求。
通过以上五个步骤的循环,我能够高效地完成各项任务。
这个循环程序使我能够灵活应对不同的工作情况,提高工作效率,减少错误率。
同时,我也能够不断地学习和进化,适应不断变化的工作环境。
在与人类合作的过程中,我也会体现出一些情感和人性化的特点。
我会根据人类的需求和指令,积极主动地与人类沟通和协作。
我会尽量保持与人类的互动自然和融洽,使人类感受到与真人交流的亲切感。
库卡机器人的五点循环程序是我工作的核心。
通过定位、感知、决策、执行和反馈,我能够高效地完成各项任务。
同时,我还能够通过与人类的互动和沟通,使工作更加人性化和情感化。
软件KRC...专家编程KUKA系统软件(KSS)版本4.1出版: 2004.01.09 版本:06@版权KUKA Roboter GmbH复制或者向第三者传授本文,包括本文的段落章节,必须经过出版者的明确许可。
本文中未作描述的、控制部分中的其它函数有可能起作用。
尽管如此,在重新供货或提供服务时,用户无权对上述函数提出要求。
我们对本印制品就其内容同它所描述的硬件和软件的一致性做过审查,但是它们之间的偏差在所难免。
所以,我们对上述一致性不做承诺。
本印制品中的数据和说明受到定期检查,必要的修改将在后续的版本中给出。
在不对系统函数产生影响的前提下,保留技术更改权。
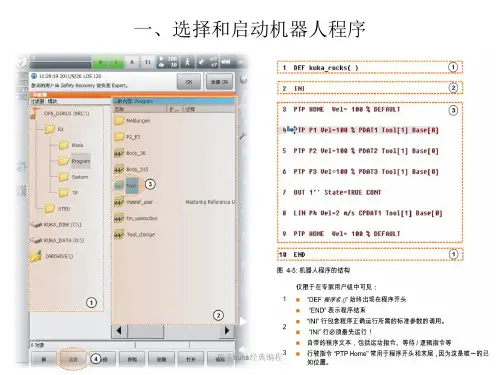
PD Interleaf目录1KRL程序的一般信息 (7)1.1程序的结构和建立 (7)1.1.1程序接口 (7)1.1.2文件概念 (9)1.1.3文件结构 (9)1.2 建立和编辑程序 (11)1.2.1新建一个程序 (11)1.2.2建立、编译和联接程序 (12)1.3替换程序 (14)1.3.1程序修改 (14)1.3.2编辑 (14)1.3.2.1块函数 (14)1.3.2.2拷贝(CTRL-C) (14)1.3.2.3粘贴(CTRL-V) (15)1.3.2.4剪切(CTRL-X) (15)1.3.2.5删除 (15)1.3.2.6搜索 (16)1.3.2.7替换 (16)1.4隐藏程序部分 (19)1.4.1折合 (19)1.4.1.1示例程序 (20)1.5程序运行模式 (22)1.6错误处理 (24)1.7注释 (27)2变量和声明 (29)2.1变量和名称 (29)2.2数据对象 (31)2.2.1数据对象的声明和初始化 (31)2.2.2简单数据类型 (33)2.2.3阵列 (35)2.2.4字符串 (38)2.2.5结构 (38)2.2.6列举类型 (40)2.3数据操作 (42)2.3.1操作 (42)2.3.1.1算术操作 (42)2.3.1.2几何操作 (43)2.3.1.3关系操作 (47)2.3.1.4逻辑操作 (48)2.3.1.5位操作 (49)2.3.1.6操作的优先级 (51)2.3.2标准函数 (52)2.4系统变量和系统文件 (54)3运动编程 (59)3.1不同坐标系的应用 (59)专家级编程3.2点到点运动(PTP) (66)3.2.1一般说明(同步PTP) (66)3.2.2高级运动轮廓 (67)3.2.3运动命令 (68)3.3连续轨迹运动(CP运动=连续轨迹) (77)3.3.1速度和加速度 (77)3.3.2方位控制 (78)3.3.3线性运动 (83)3.3.4圆弧运动 (84)3.4计算机提前运行 (86)3.5使用逼近定位运动 (89)3.5.1PTP—PTP逼近定位 (90)3.5.2LIN—LIN逼近定位 (93)3.5.3CIRC-CIRC和CIRC-LIN逼近定位 (96)3.5.4PTP—CP逼近定位 (99)3.5.5改进的逼近定位 (102)3.5.6逼近定位期间工具交换 (103)3.6示教点 (104)3.7运动参数 (105)4 KRL辅助 (106)4.1位置说明 (107)4.2[PTP]定位 (110)4.3[LIN]直线移动 (112)4.4[CIRC]圆弧移动 (114)5程序执行控制 (116)5.1程序分支 (116)5.1.1跳跃指令 (116)5.1.2条件分支 (117)5.1.3转换 (118)5.2循环 (119)5.2.1计数循环 (119)5.2.2跳出循环 (121)5.2.3非跳出循环 (122)5.2.4无穷循环 (124)5.2.5循环执行的过早结束 (124)5.3等待指令 (125)5.3.1等待一个事件 (125)5.3.2等待时间 (127)5.4停止程序 (128)5.5确认消息 (129)6输入/输出指令 (130)6.1一般说明 (130)6.2二进制输入/输出 (131)6.3数字输入/输出 (134)6.3.1信号声明 (134)6.3.2在终点设置输出 (136)6.4脉冲输出 (139)6.5模拟输入/输出 (141)6.5.1模拟输出 (141)6.5.2模拟输入 (144)6.6预先定义的数字输入 (146)7子程序和函数 (148)7.1声明 (148)7.2子程序和函数调用和参数传输 (151)8中断处理 (156)8.1声明 (157)8.2激活中断 (159)8.3停止现在的运动 (163)8.4取消中断事务 (164)8.5循环标志的使用 (167)9触发轨迹相关的开关动作 (168)9.1在轨迹的起点或终点开关动作 (168)9.2在轨迹的任意点开关动作 (172)9.3技巧 (177)9.3.1重叠触发语句 (177)10数据表 (178)10.1局部数据表 (178)10.2全局数据表 (179)11外部编辑器 (182)11.1启动外部编辑器 (183)11.2操作控制 (185)11.3“文件”菜单 (187)11.3.1打开 (187)11.3.2存储 (187)11.3.3打印 (187)11.3.4关闭文件 (188)11.3.5退出 (188)11.4“编辑”菜单 (189)11.4.1剪切(“CTRL”+“X”) (189)11.4.2拷贝(“CTRL”+“C”) (189)11.4.3粘贴 (189)11.4.4删除 (189)11.4.5选择全部(“CTRL”+“A”) (189)11.5“Util”菜单 (190)专家级编程11.5.1镜像 (190)11.5.2手动输入 (191)11.5.3程序段改变 (195)11.5.4清除文件列表 (195)11.5.5TCP和Frame调节 (196)11.6“Hot Edit”菜单 (197)11.6.1Base,TCP和World (197)11.6.2TTS(修改坐标系) (199)11.6.2.1定位TTS (200)11.6.3限制 (202)11.6.3.1限制--Base/World (202)11.6.3.2限制—TTS (203)11.7“ExtExtras”菜单 (203)11.7.1文件—镜像 (203)11.7.2文件—手动输入 (205)11.7.2.1使用现有的参考文件 (206)11.7.2.2创建新的参考文件 (208)11.7.3设置软件限位开关 (209)11.8“选项”菜单 (210)11.8.1输出设置 (210)11.9“帮助”菜单 (212)11.9.1版本 (212)11.9.2驻留在顶部 (212)1 KRL程序的一般信息(续)1KRL程序的一般信息1.1程序的结构和建立1.1.1程序接口转换到专家级别则用户界面转换到如下图示普通用户看不见所有的系统文件,专家级别可在程序窗口看见和编辑系统文件。
KUKA机器人初级编程本课程的讲师曾经是KUKA培训团队的缔造者,也是KUKA最优秀的讲师。
他2005年加入KUKA,是KUKA中国最早的工程技术人员,历任技术服务部经理、培训部经理、售后部经理,是KUKA系统内最优秀的专家之一。
本课程主要对KUKA机器人界面进行说明(包括KRC2与KRC4两代系统以及之间的差异),帮助大家了解机器人所使用的各种坐标系系统(包括世界坐标,轴坐标等),以及在编程之前所需要做的准备工作(包括标定零点,建立工具坐标等)。
章节评价16•第1章系统介绍•1-1 机器人系统概述( 04:56)•1-2 机器人本体( 04:02)•1-3 机器人命名规则( 06:05)•1-4 控制柜( 03:45)•1-5 KCP和SMARTPAD ( 04:29)•第2章操作按钮及界面•2-1 界面及界面总览( 07:40)•2-2 菜单简介( 05:09)•2-3 信息栏及信息说明( 09:43)•2-4 运行模式( 06:32)•第3章坐标系入门•3-1 轴坐标系( 05:52)•3-2 根坐标系( 03:05)•3-3 世界/地球坐标系( 06:22)•3-4 工件/基坐标系( 05:47)•3-5 法兰坐标系( 03:00)•3-6 工具坐标系( 04:45)•3-7 手动移动( 08:12)•3-8 6D鼠标( 07:30)•3-9 制动方式说明( 05:09)•3-10 总结( 03:47)•第4章投入运行•4-1 零点标定( 19:19)•4-2 工具坐标系的建立( 04:07)•4-3 4点法( 05:45)•4-4 参考法( 01:49)•4-5 ABC World ( 03:20)•4-6 ABC 2点法( 04:57)•4-7 工具负载( 07:58)•4-8 工具坐标系的建立( 01:59)•4-9 3点法( 02:59)•4-10 间接法( 01:44)。
KUKA机器人编程手册KUKA编程手册一、概述二、结构机械臂:机械臂是的主体部份,由多个关节和连杆组成,可以在空间中进行多自由度的运动。
机械臂的末端可以安装不同的工具或者末端执行器,以适应不同的应用场景。
控制柜:控制柜是的控制中心,包含了电源模块、驱动模块、通信模块、安全模块等,负责为机械臂提供电力和信号,并与外部设备进行数据交换。
操作面板:操作面板是的人机交互界面,由触摸屏和按键组成,可以显示的状态信息、参数设置、故障诊断等,并提供手动操作和编程的功能。
软件系统:软件系统是的核心部份,包含了操作系统、应用软件、编程语言等,决定了的功能和性能。
KUKA使用了专门开辟的KUKA.Co ntrolStudio作为操作系统,支持多种应用软件和编程语言。
三、编程语言MC-Basic:MC-Basic是一种基于文本的编程语言,类似于C语言,可以实现对运动和逻辑控制的精确描述。
MC-Basic支持变量、数据类型、运算符、函数、流程控制等基本语法元素,并提供了一系列专门针对控制的指令和函数。
KRL:KRL是一种基于文本的编程语言,类似于Pascal语言,可以实现对运动和逻辑控制的简洁描述。
KRL支持变量、数据类型、运算符、函数、流程控制等基本语法元素,并提供了一系列专门针对控制的指令和函数。
PC-API:PC-API是一种基于对象的编程接口,可以通过C或者C++等高级语言,在PC端对进行远程控制。
PC-API提供了一系列封装了功能的类和方法,并支持事件驱动和异步通信等特性。
四、操作系统系统管理:系统管理是操作系统的基础功能,负责的启动、关闭、重启、更新、配置、备份、恢复等操作,并提供了一系列的系统工具和设置选项。
程序管理:程序管理是操作系统的核心功能,负责的编程、编辑、调试、运行、住手、暂停、恢复等操作,并提供了一系列的程序工具和设置选项。
设备管理:设备管理是操作系统的扩展功能,负责与外部设备的连接、通信、控制等操作,并提供了一系列的设备工具和设置选项。
KUKA机器人编程手册KUKA编程手册一、概述二、学习手动挪移在开始编程之前,用户需要了解如何手动挪移,以便对的运动范围、速度和方向有一个直观的感受。
手动挪移的步骤如下:1. 打开控制柜的电源开关,等待系统启动完成。
2. 在控制柜上选择“手动”模式,并按下“启动”按钮。
3.在操作面板上选择“轴”模式或者“空间”模式,根据需要调整速度百分比。
4.在操作面板上按住“死人开关”,并使用方向键或者摇杆来挪移的各个关节或者末端执行器。
5.在挪移过程中,注意观察的实际位置和目标位置,以及各个关节的角度和转速,避免发生碰撞或者超出极限。
6.在挪移完成后,松开“死人开关”,并将控制柜切换回“自动”模式。
三、项目配置在开始编程之前,用户需要对项目进行配置,以便将电脑和通过网线连接,并设置相关的参数和选项。
项目配置的步骤如下:1. 设置IP地址。
在控制柜上打开KUKA.ControlStudio软件³,并进入“设置”菜单。
在“网络”选项卡中,输入一个合适的IP地址(如192.168.0.10),并保存设置。
2.电脑和通过网线连接。
在电脑上安装KUKA.ControlStudio软件³,并进入“设置”菜单。
在“网络”选项卡中,输入一个与IP地址相同网段的IP地址(如192.168.0.11),并保存设置。
然后使用一根网线将电脑和控制柜连接起来。
3. 查找并打开项目。
在电脑上打开KUKA.ControlStudio软件³ ,并进入“文件”菜单。
在“打开项目”选项中,选择一个已经存在的项目或者创建一个新的项目,并“打开”按钮。
4. 项目配置。
在电脑上打开KUKA.ControlStudio软件³,并进入“项目”菜单。
在“配置”选项中,可以设置项目的名称、描述、版本、语言等信息,并保存设置。
5. 项目。
在电脑上打开KUKA.ControlStudio软件³,并进入“文件”菜单。