单自由度机械振动系统谐和力激励的受迫振动教程
- 格式:ppt
- 大小:711.00 KB
- 文档页数:64
第13例谐响应分析实例—单自由度系统的受迫振动单自由度系统是动力学中的一个基本模型,用于描述质点或弹性系统在其中一方向上的振动。
在实际应用中,往往会遇到系统受到外力作用的情况,这时系统的运动方程称为受迫振动方程。
本文将基于第一章学习的单自由度系统的动力学原理,通过一个实际的例子,展示如何利用谐响应分析方法来解决单自由度系统的受迫振动问题。
假设一个质量为m的小球通过一根无摩擦的弹簧与固定点相连,并受到一个周期性外力的作用。
我们的目标是求解小球的运动方程,并分析系统在谐响应下的特性。
首先我们需要建立系统的动力学方程。
根据牛顿第二定律,可以得到受迫振动方程:m*a + c*v + k*x = F0*sin(ω*t)其中,m是小球的质量,a是小球的加速度,c是阻尼系数,v是小球的速度,k是弹簧的刚度,x是小球与平衡位置的位移,F0是外力的振幅,ω是外力的角频率,t是时间。
根据系统的初始条件,可以得到小球的初始位移和初始速度:x(0)=x0,为了求解受迫振动方程的特解,假设系统在稳态下的解为:x = A*sin(ωt + φ).将上式代入受迫振动方程,可以得到A和φ的关系式:A*[(-mω^2 + k)*sin(ωt + φ) + cω*cos(ωt + φ)] =F0*sin(ωt).由于上式中左右两侧的正弦项和余弦项的系数相等,根据同角正弦和余弦函数的和差公式,可以得到:A*[(-mω^2 + k)*sinφ + cω*cosφ] = F0,为了使得上述两个方程成立,可得到A和φ应满足的条件:解以上方程可以得到稳态下的解A和φ。
得到稳态解之后,我们可以分析系统的振动特性。
首先,可以计算出系统的谐响应函数:谐响应函数H(ω)描述了系统在不同外力频率下的响应强度。
图像的幅频响应特性被称为频率响应曲线。
为了绘制频率响应曲线,我们可以通过改变外力的频率ω来计算不同的稳态解A,进而得到H(ω)的数值。
其次,还可以分析系统的幅频特性。
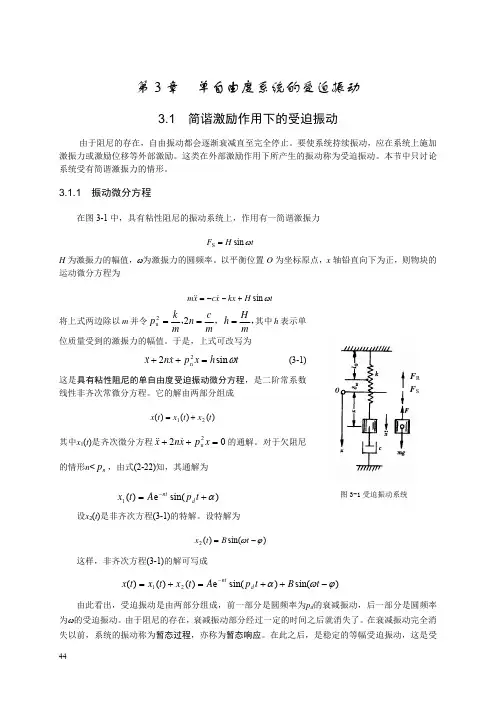
第三章单自由度系统的简谐激励强迫振动第一节导引从本章起,讨论系统由外界持续激励引起的振动,称为强迫振动。
激励按来源分:1.力激励:①直接作用于机械运动部件上的力②有旋转机械或往复运动机械中不平衡质量引起的惯性力2. 支承运动而导致的位移激励、速度激励及加速度激励激励按随时间变化规律分:1. 简谐激励2.周期激励3.任意激励外界激励所引起的系统的振动状态称为响应。
对应于不同的外界激励,系统将具有不同的响应。
系统的响应一般以位移形式表示,称为位移响应。
有时也以速度形式或加速度形式表示,分别称为速度响应或加速度响应。
简谐激励是激励形式中最简单的一种,但掌握系统对于简谐激励的响应的规律,是理解系统对于周期激励或更一般形式激励的响应的基础。
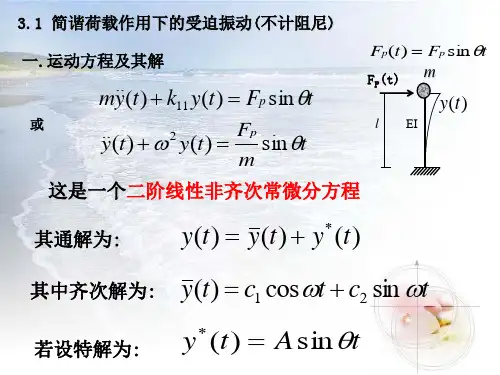
第二节 简谐激励下的响应一、运动方程及其解o sin tω在质量-弹簧-阻尼系统中,质量块上作用有简谐激励力0()sin F t F t ω=其中 0F --- 激励力幅ω --- 激励频率以静平衡位置为坐标原点,建立坐标系。
系统的运动微分方程为0sin mx cx kx F t ω++= (3-1)由高数知,上式是二阶常系数非齐次常微分方程。
该方程的通解()x t 由相应的齐次方程的通解()c x t 和非齐次方程的特解()p x t 两部分组成,即()()()c p x t x t x t =+(1)齐次方程的通解()c x t齐次方程的通解()c x t 对应于有阻尼自由振动的解,在弱阻尼(1ζ<)的情况下为()()()cos sin sin n n t c d d td x te A t B t Aet ζωζωωωωψ--=+=+式中A 和B 为待求常数,由初始条件确定。
(2)非齐次方程的特解()p x t根据高数,非齐次方程的特解()p x t 假设为()sin()p x t X t ωϕ=- (3-4)将()p x t 及其一阶导数、二阶导数代入式(3-1),得20()sin()cos()sin k m X t c X t F tωωϕωωϕω--+-=利用三角公式,将上式右端改写成如下形式0000sin sin[()]cos sin()sin cos()F t F t F t F t ωωϕϕϕωϕϕωϕ=-+=-+-代入上式,得200()sin()cos()cos sin()sin cos()k m X t c X t F t F t ωωϕωωϕϕωϕϕωϕ--+-=-+-比较方程左右两侧sin()t ωϕ-和cos()t ωϕ-的系数,得200()cos sin k m X F c X F ωϕωϕ⎧-=⎨=⎩ 联立求解,得F X =(3-2)2c tg k m ωϕω=- (3-5) (3)方程的通解()x t ()()()()cos sin sin()n c p td d x t x t x t eA tB t X t ζωωωωϕ-=+=++-(3-6)设000,(0),(0)t x x x x ===,将初始条件代入方程(3-6)和它的一次导数,解出A 和B ,再回代入方程(3-6),得000()cos sin n tn d d d x x x t e x t t ζωζωωωω-⎛⎫+=+⎪⎝⎭① sin cos sin cos sin nt n d d d Xe t t ζωζωϕωϕϕωωω-⎛⎫-++⎪⎝⎭② sin()X t ωϕ+- ③这就是初始条件为0x 、0x ,在简谐激励力0sin F ϕ作用下系统的响应(系统的强迫振动)。