基于stcc单片机的智能交通灯设计
- 格式:docx
- 大小:122.02 KB
- 文档页数:47

基于单片机的智能交通灯控制器设计一、本文概述随着城市化进程的加快,交通拥堵问题日益严重,智能交通系统的应用与发展成为解决这一问题的关键。
其中,智能交通灯控制器作为交通系统的重要组成部分,对于提高道路通行效率、保障行车安全具有重要意义。
本文旨在设计一种基于单片机的智能交通灯控制器,通过优化算法和硬件设计,实现交通灯的智能控制,以适应不同交通场景的需求,提升城市交通的整体运行效率。
本文将首先介绍智能交通灯控制器的研究背景和意义,阐述现有交通灯控制系统的不足和改进的必要性。
接着,文章将详细介绍基于单片机的智能交通灯控制器的设计方案,包括硬件电路的设计、控制算法的选择与优化等方面。
在此基础上,本文将探讨如何通过软件编程实现交通灯的智能控制,并讨论如何在实际应用中调试和优化系统性能。
文章将总结研究成果,展望智能交通灯控制器在未来的发展方向和应用前景。
通过本文的研究,旨在为城市交通管理提供一种新的智能化解决方案,为缓解交通拥堵、提高道路通行效率提供有力支持。
本文的研究也有助于推动单片机技术和智能交通系统的发展,为相关领域的研究和实践提供有益的参考和借鉴。
二、单片机技术概述单片机,即单片微型计算机(Single-Chip Microcomputer),是一种集成电路芯片,它采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、多种I/O 口和中断系统、定时器/计时器等功能集成到一块硅片上,构成一个小而完善的微型计算机系统。
单片机以其体积小、功能强、成本低、可靠性高、应用广泛等特点,广泛应用于工业控制、智能仪表、家用电器、医疗设备、航空航天、军事装备等领域。
单片机作为智能交通灯控制器的核心部件,具有不可替代的重要作用。
它负责接收来自传感器的交通信号输入,根据预设的交通规则和算法,快速作出判断,并输出相应的控制信号,以驱动交通信号灯的亮灭和变化,从而实现交通流量的有序控制和疏导。

基于STC89C52单片机的数显交通灯设计方案1.1 课题背景随着我国国民经济的迅速发展,城市街道车辆大幅度增长,给城市交通带来巨大压力,交通拥堵已经成为影响城市可持续发展的一个全局性问题。
而街道各十字路口,又是车辆通行的瓶颈所在。
已有的许多建立在精确模型基础上的交通系统控制方案都存在着一定的局限性。
研究车辆通行规律,找出提高十字路口车辆通行效率的有效方法,对缓解交通阻塞,提高畅通率具有十分现实的意义。
地面道路是一个庞大的网络,交通状况十分复杂,使目前交通灯控制器的单一时段控制已不能满足现代交通流量的多变性,特别是在交通流量高峰时,往往会造成交通路口的通过率下降,甚至出现交通混乱现象,城市的交通拥挤问题正逐渐引起人们的注意。
道路平面交叉口(简称交叉口)是交通网中通行能力的“隘口”和交通事故的“多发源”,国内外城市的交通事故约有一半发生在交叉口。
因此,交叉口这个事故多发源不能不引起人们的高度关注。
随着交通技术、电子技术的发展及微机技术的应用,人们设计出了适应各种需要的交通检测器、信号控制机和交通信号灯。
交通灯是交管部分管理城市交通的重要工具。
现在交通灯一般设在十字路口,在醒目位置用红、绿、黄三种颜色的指示灯,加上一个倒计时的显示计时器来控制行车,对于一般情况下的安全行车、车辆分流发挥着作用。
目前绝大部分交通灯其时间都是设定好的,采用的是单段式定时控制或多段式定时控制,其最大的缺点是绿灯时间和绿信比是固定的或是分时段固定的,且最佳绿灯时间和最佳绿信比的整定较为困难,需要大量的实测统计数据, 且很多情况下整定所得值并不是最优的,甚至是不合理的。
控制起来都不是很灵活,这使得城市车流的调节不能达到最优。
这次设计正是针对这一弊端进行了改进,较好地解决了这一问题。
根据实时车流量对各路口的绿灯时间进行动态调节,大大加强了其灵活性和实时性,本系统本着“先到先服务”的原则,在保证交通安全性不降低的条件下提高了交通效率。

基于STC90C51单片机的智能交通灯设计智能交通灯是一种通过感知道路车辆、行人等信息,根据交通流量和
需求来控制交通的一种系统。
它能够根据道路的实际情况及交通流量自动
调整红绿灯的时间,并通过显示屏来提醒司机行车注意事项,从而提高道
路交通的效率和安全性。
本文将基于STC90C51单片机,设计一个智能交
通灯系统。
首先,我们需要一块合适的开发板,STC90C51是一片广泛应用的单
片机,并且具有丰富的外设接口,适合作为智能交通灯系统的控制主板。
我们可以通过这个单片机来实现对交通灯的控制,以及对传感器信号的处理。
其次,交通灯的设计需要注意车辆和行人的感知和控制。
我们可以通
过红外传感器来感知车辆和行人的存在。
通过对传感器信号的采集和处理,我们可以确定交通流量,从而根据实际情况来调整交通灯的通行时间。
接下来,我们需要一个显示屏来提醒司机行车注意事项。
我们可以通
过数码管或LCD显示屏来显示交通灯的状态,如红灯、绿灯和黄灯的时间等,以便司机及时了解当前交通情况。
最后,我们需要一个交通灯控制算法来实现智能交通灯的自动调整。
在实际交通中,不同道路的通行需求以及交通流量是不断变化的,因此需
要一个智能的算法来根据实时数据来调整交通灯的时间。
可以根据不同情
况设置不同的时间参数,如高峰期和低峰期,根据实际情况来灵活调整交
通信号灯的时间。
总结起来,基于STC90C51单片机的智能交通灯设计,需要考虑交通灯的感知和控制、显示屏的显示和交通灯的控制算法。
通过合理设计和实现,可以提高道路交通的效率和安全性,为人们的行车提供更好的体验。

基于单片机的交通灯设计XXX traffic light system based on two STC89C52 microcontrollers as the core control components。
three-color LED lights as signal light state displays。
and two common cathode seven-segment displays to describe the time that each n's signal light state is maintained。
The system is initialized by a button switch。
and the LED light state maintenance time is displayed in countdown。
with a maximum display time of 99 seconds。
Two sets of left-turn green。
green。
red。
and yellow three-color LED lights are used as the signal light display module for the north-south and east-west ns。
and four sets of red and green two-color LED lights are used as the pedestrian crossing traffic signal indicators for the east-west and north-south ns。
respectively。
This design can handle the basic control of the traffic signal system at XXX。

《单片机课程设计》课程设计说明书专业班级:姓名:学号:指导教师:设计时间:目录1 概述 (3)1.1 设计的意义 (3)1.2 设计的思想 (3)1.3 设计满足的基本功能 (4)2 系统方案设计 (4)2.1 系统方案的选择................ . (4)2.2 系统方案的确定 (4)3 系统硬件设计3.1 显示部分电路设计 (5)3.2 时钟部分电路设计 (6)3.3 复位部分电路设计 (6)3.4 LED显示电路 (7)4 系统软件设计 (7)4.1 应用系统软件设计要求 (7)4.2 主程序模块的设计 (8)4.3 延时程序模块的设计 (10)5 Protel软件仿真 (10)5.1 具体仿真结果显示 (10)6 课程设计体会 (10)参考文献 (11)7.附录 (12)附1:源程序代码 (12)附2:系统原理图 (19)摘要本设计是关于单片机控制的交通灯模拟系统的设计。
该设计中用LED灯来模拟信号灯。
利用STC89C52RC单片机,调用延时程序对通行时间进行倒计时,从P0口输出并显示在数码管上,P1控制LED的显示,P2通过74LS138译码器控制数码管的位选,以此来实现十字路口交通灯的指示功能,当出现紧急情况时,通过按下P3.2产生中断,路口全部显示红灯,一段时间后可恢复原来的状态。
根据交通灯系统所需要实现的功能要求,先画出程序部分的流程图和主程序流程图,然后根据流程图写出其子程序。
从而通过模拟系统的仿真来实现该设计所要求的功能。
此交通灯系统要求实现如下的的功能:1)南北方向(主干道)车道和东西方向(支干道)车道两条交叉道路上的车辆交替运行,主干道每次通行时间都设为80秒、支干道每次通行间为60秒。
2)在绿灯转为红灯时,要求黄灯先闪亮3秒钟,才能变换运行车道;3)当出现紧急情况时,四个路口全部显示红灯,一段时间后恢复原来状态。
关键字:单片机交通灯系统 LED指示灯 74LS138译码器1概述1.1设计意义交通的发达程度,是一个城市发达程度的指标之一,由此可见对交通的管理则显得越来越重要。

基于单片机的交通灯控制系统设计交通灯控制系统是城市交通管理的重要组成部分,它通过灯光信号的方式来引导车辆和行人的交通流动,提高道路交通的安全性和效率。
基于单片机的交通灯控制系统设计可以实现对交通灯灯光的控制、时序的调整和故障的检测等功能,下面将对该系统的设计进行详细介绍。
首先,系统将采用单片机作为控制核心,选择一种性能稳定、功能强大的单片机芯片,例如STC89C51单片机。
该单片机具有强大的I/O口、定时器和中断功能,适用于交通灯控制系统的设计和开发。
其次,系统将采用红绿灯的设计,包括车行红灯、车行绿灯、行人红灯和行人绿灯。
通过控制单片机的输出口和定时器,实现灯光的切换和时序的控制。
例如,当车行红灯亮起时,行人绿灯亮起,车行绿灯和行人红灯同时熄灭,车辆停车等待;当车行绿灯亮起时,行人红灯亮起,车行红灯和行人绿灯同时熄灭,车辆可以通行。
此外,系统还需要设置手动模式和自动模式两种工作状态。
在手动模式下,可以手动切换灯光,例如按下按钮切换车行红灯和车行绿灯;在自动模式下,系统将按照预设的时序自动切换灯光,例如每个方向的绿灯亮起时间为30秒,红灯亮起时间为10秒。
为了提高系统的可靠性和可调整性,还可以采用传感器来检测交通流量和车辆排队情况,并根据实际情况动态调整灯光的时序。
例如,当一些方向的车辆排队较多时,可以延长该方向的绿灯时间,以提高交通流畅度。
此外,系统还需要具备故障检测和自动恢复功能。
例如,当一些灯光故障时,系统可以通过检测到异常信号来判断故障情况,并自动切换到备用灯光,通知维修人员进行维修。
在硬件设计方面,除了单片机和灯光模块外,还需要设计电路板、电源供应、按钮、指示灯等部分。
电路板可以通过软件进行设计,包括电源管理、IO口的连接和定时器的设置。
电源供应可以采用稳压电源,保证系统的正常运行。
按钮和指示灯可以通过IO口进行连接,实现对灯光和模式的切换。
总之,基于单片机的交通灯控制系统设计可以实现交通灯灯光的控制、时序的调整和故障的检测等功能,提高了交通管理的自动化程度和可调整性,为城市交通的安全和效率提供了重要的支持。

基于单片机的智能交通灯控制系统的设计说明智能交通灯控制系统是一个重要的交通管理系统,在现代城市交通中起到了不可或缺的作用。
本文将介绍一个基于单片机的智能交通灯控制系统的设计说明,包括系统架构、工作原理和实现要点。
1.系统架构智能交通灯控制系统的基本架构包括三个关键部分:交通灯设备、控制器设备和通信设备。
交通灯设备:由红灯、黄灯和绿灯组成,根据交通信号控制规则进行颜色变换。
控制器设备:使用单片机作为控制器,接收输入信号并控制交通灯的状态转换,同时与通信设备进行数据交互。
通信设备:用于与其他交通信号系统进行通信,如与车辆传感器、行人信号系统等进行信息交换。
2.工作原理智能交通灯控制系统的工作原理如下:2.1接收输入信号系统通过车辆传感器、行人传感器等设备,实时接收交通流量和行人流量的信号。
2.2分析交通情况控制器设备对接收到的信号进行分析和处理,判断交通流量和行人流量的大小和方向。
2.3生成控制指令控制器根据交通信号控制规则,生成对应的控制指令,包括红灯、黄灯和绿灯的时间长度。
2.4控制交通灯状态控制器将生成的控制指令发送给交通灯设备,控制交通灯的状态进行转换。
2.5与其他系统进行通信控制器还可以与其他交通信号系统进行通信,实现信息交换和协同工作,如与行人信号系统进行同步。
3.实现要点在设计基于单片机的智能交通灯控制系统时,需要考虑以下几个要点:3.1硬件选择选择合适的单片机型号,具备足够的计算能力和接口功能,满足系统的需求。
同时,选用高亮度的LED灯作为交通灯设备,以确保可见性。
3.2软件设计编写控制器的软件程序,包括输入信号的处理、交通流量分析、控制指令生成和交通灯状态控制等功能。
同时,采用合适的算法和数据结构,提高系统的效率和稳定性。
3.3通信接口设计设计与其他交通信号系统进行通信的接口,包括通信协议和数据格式等。
确保系统能够与其他设备实现信息的交互和协同工作。
3.4安全保障考虑系统的安全性,采取必要的安全措施,如加密通信、备份控制器程序、实时监测和故障报警等,以保障系统的正常运行和数据的安全性。
基于STC89C52RC单片机的智能交通灯控制系统设计Design of Traffic Lights Control Module Based on STC89C52RC摘要:交通灯控制系统是智能交通系统中重要的组成部分。
选择微处理器STC89C52RC作为核心芯片,设计了一种通用化、可独立挂接的交通灯控制模块。
硬件电路围绕STC89C52RC搭建,由单片机的I/0口给出控制信号,数码管显示倒计时,LED放光二极管模拟交通灯运行。
软件体系在总体上按照串口通信机理设计了自定义通信协议,并编写了指令以实现系统运行所要求的功能。
关键词:交通灯控制模块 STC89C52RC 单片机倒计时 Proteus1 引言城市智能交通系统(ITS)中,路口信号灯控制子系统是现代城市交通监控指挥系统中重要的组成部分。
交通控制灯是我们日常生活中重要的交通控制设施,安装在各个交叉路口,在疏导车辆通行中有着很重要的意义。
交通控制灯有红黄绿三种颜色组成,红灯代表停止,绿灯代表通行,黄灯代表警示,在车辆逐渐增多的今天,交通灯的出现大大缓解了交通堵塞,以及减少了交通事故的发生。
目前交通信号灯控制系统有多种的实现方法,本文采用STC89C52RC为核心器件配以数码管,发光二极管来进行交通控制灯的设计,采用Proteus软件来进行模拟仿真,提高了系统的可实用性,使过程更加形象生动。
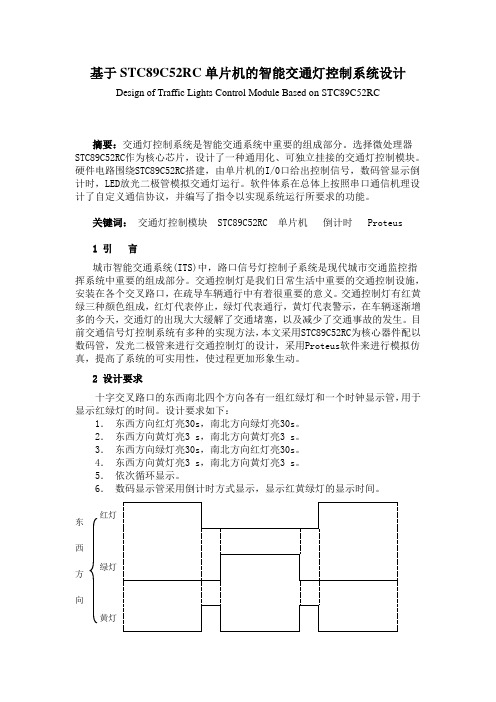
2 设计要求十字交叉路口的东西南北四个方向各有一组红绿灯和一个时钟显示管,用于显示红绿灯的时间。
设计要求如下:1.东西方向红灯亮30s,南北方向绿灯亮30s。
2.东西方向黄灯亮3 s,南北方向黄灯亮3 s。
3.东西方向绿灯亮30s,南北方向红灯亮30s。
4.东西方向黄灯亮3 s,南北方向黄灯亮3 s。
5.依次循环显示。
6.数码显示管采用倒计时方式显示,显示红黄绿灯的显示时间。
东西方向红灯绿灯黄灯南北方向红灯绿灯黄灯30s3s30s3s30s图1 交通灯工作时序3 系统总体设计及硬件电路系统系统设计为独立模块,模块可以采用智能总线的形式与上位机相连接,这种分布式开放体系结构使得交通灯控制系统可以自由组合与自由发展。


基于S T C C单片机的智能交通灯设计HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】基于STC90C51单片机的交通灯设计1、设计题目基于STC90C51单片机的智能交通灯设计2、设计要求、系统功能(1)按照交通规则,控制宝田路和前进路方向及其人行道的交通信号灯(红﹑黄﹑绿)的通断。
(2)设置信号灯的通断时间。
(3)可人工干预,使交通信号灯开启不同模式。
、性能参数:(1)电源:5VDC(2)LED灯电流:10mA(3)定时时间:10s-200s3、总体设计根据系统功能和设计要求,系统采用单片机控制的方案,基于HC6800S开发板,由STC90C51,74HC573,交通灯模块,动态数码显示管以及4*2独立按键组成。
系统工作原理在十字路口,分为宝田路和前进路,正常情况下,在任一时刻只有一个方向通行,另一方向禁行,持续一定时间,经过短暂的过渡时间,将通行禁行方向对换。
其具体状态如下:(1)普通模式:状态一:宝田路通行阶段(宝田路及其人行道亮绿灯30秒、前进路及其人行道亮红灯30秒);状态二:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒);状态三:前进路通行阶段(前进路及其人行道亮绿灯30秒、宝田路及其人行道亮红灯30秒);状态四:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒);返回到状态一。
(2)高峰期模式(设宝田路为主干道):按下按键2(key2),开启高峰期模式;状态一:宝田路通行阶段(宝田路及其人行道亮绿灯60秒、前进路及其人行道亮红灯30秒);状态二:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒);状态三:前进路通行阶段(前进路及其人行道亮绿灯30秒、宝田路及其人行道亮红灯30秒);状态四:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒);返回到状态一;按键2释放,回到普通模式。
(3)紧急模式:按下按键1(key1),开启紧急模式,所有道路及其人行道均红灯亮,数码管不显示。

基于单片机STC89C52RC的交通灯摘要:本交通灯系统采用STC89C52RC作为核心控制器,控制红绿黄三盏灯,来达到模拟日常交通灯系统,其中倒计时时间通过1602显示出来。
关键词:交通灯1602液晶一、设计方案整个模拟交通灯系统用单片机STC89C52RC作为核心控制器,有序的控制着红黄绿三盏灯的运行,实际交通灯系统所需的倒计时时间采用1602显示出来,并且其倒计时时间可通过独立式键盘进行调整。
系统框图二、主程序流程图三、附录------源程序(C)一、the main function of this system/**用stc52实现简易交通灯*/#include<reg52.h>#include<intrins.h>#include "define.h"#include "lcd_1602.h"#include "delay.h"#include "some_inits.h"#include "control.h"/****************************************主函数void main()****************************************/void main(){sys_init();while(1){key_scan(); //扫描键盘delay_ms(100);}}二、include Some .h files(1)defines.h#ifndef _define_h#define _define_h#define uchar unsigned char#define unint unsigned int/* 液晶数据区*/sfr lcd_bus=0x80; //液晶数据口sbit E=P2^7;sbit RW=P2^6;sbit RS=P2^5;/* 定义三盏led */sbit red=P2^0;sbit green=P2^1;sbit yellow=P2^2;/* 定义三个开关*/sbit jia=P1^0; //加一键sbit jian=P1^1; //减一键sbit ok=P1^2; //确认键uchar flag=1; //1,2,3:绿灯,黄灯,红灯bit first=0;/* 蜂鸣器*/sbit bell=P1^4;uchar sec_h; //秒针十位uchar sec_l; //秒针个位uchar g_h=1,g_l=0;//绿灯计时数据uchar y_h=1,y_l=0;//黄灯计时数据uchar r_h=1,r_l=0;//红灯计时数据#endif(2)some_inits.h#ifndef _some_inits_h#define _some_inits_h#include "lcd_1602.h"#include "define.h"//state some functionsvoid L1602_init();void Time0_init();/*系统初始化*/void sys_init(){flag=1; //绿灯green=1;red=0;yellow=0;L1602_init();//1602液晶初始化Time0_init();//定时器0初始化}/*1602初始化*/void L1602_init(void){enable(0x01);enable(0x38);enable(0x0c);enable(0x06);enable(0xd0);L1602_string(1,2,"traffic lights");sec_h=g_h;sec_l=g_l;L1602_char(2,8,sec_h+0x30);L1602_char(2,9,sec_l+0x30);}/* 定时器0初始化*/void Time0_init(){TMOD=0x01; //time0,time1工作在方式一IE=0x8a; //开EA,允许ET0,允许ET1TH0=0x4c; //50ms,晶振是11.0592MTL0=0x00;//TH1=0xfc; //1ms//TL1=0x66;TR0=1; //time0开始计数}#endif(3)control.h #ifndef _control_h_#define _control_h_#include <intrins.h>#include "lcd_1602.h"#include "define.h"#include "delay.h"/* state some functions */void inc();void dec();void fmq();/* 键盘扫描函数*/void key_scan(){if(ok==0){delay_ms(5);if(ok==0){fmq();enable(0x0c); //关光标first=0;TR0=1; //开始计数}else _nop_();}else if(jia==0 || jian==0){delay_ms(5);if(jia==0 || jian==0){TR0=0; // 停止计数fmq();while(!first){first=1;enable(0x0f); //开光标,开反白}if(jia==0) inc();else if(jian==0) d ec();}else{_nop_();}}}/* 加一*/void inc(void){_nop_();if(green==1 && yellow==0 && red==0) {if(g_l<9 && g_h<5) g_l++;else{if(g_h<5){g_h++;g_l=0;}else{g_h=5;g_l=0;}}sec_h=g_h;sec_l=g_l;}else if(yellow==1 && red==0 && green==0) {if(y_l<9 && y_h<5) y_l++;else{if(y_h<5){y_h++;y_l=0;}else{y_h=5;y_l=0;}}sec_h=y_h;sec_l=y_l;}else if(red==1 && green==0 && yellow==0 ) {if(r_l<9 && r_h<5) r_l++;else{if(r_h<5){r_h++;r_l=0;}else{r_h=5;r_l=0;}}sec_h=r_h;sec_l=r_l;}L1602_char(2,9,sec_l+0x30);L1602_char(2,8,sec_h+0x30);}/* 减一*/void dec(void){_nop_();if(green==1 && yellow==0 && red==0){if(g_l>0 && g_h>0){g_l--;}else{if(g_h>0){g_h--;g_l=9;}else if(g_l>0){g_l--;}else{g_h=0;g_l=0;}}sec_h=g_h;sec_l=g_l;}else if(yellow==1 && green==0 && red==0) {if(y_l>0 && y_h>0){y_l--;}else{if(y_h>0){y_h--;y_l=9;}else if(y_l>0){y_l--;}else{y_h=0;y_l=0;}}sec_h=y_h;sec_l=y_l;}else if(red==1 && yellow==0 && green==0) {if(r_l>0 && r_h>0){r_l--;}else{if(r_h>0){r_h--;r_l=9;}else if(r_l>0){r_l--;}else{r_h=0;r_l=0;}}sec_h=r_h;sec_l=r_l;}L1602_char(2,9,sec_l+0x30);L1602_char(2,8,sec_h+0x30);}/* 蜂鸣器鸣响一声*/void fmq(){unint i=150;while(i--){bell=~bell;delay_ms(1);}}/* time0 service function */void time0() interrupt 1{static count=0;TR0=0;if(count==20) //1s{count=0;if(sec_l==0){if(sec_h==0) //30s结束{if(flag==1){flag++;green=1;red=0;yellow=0;sec_h=g_h;sec_l=g_l;}else if(flag==2) //状态二,亮黄灯{flag++;green=0;red=0;yellow=1;sec_h=y_h;sec_l=y_l;}else if(flag==3)//状态三,红灯亮{flag=1; //回到状态一,绿灯亮green=0;red=1;yellow=0;sec_h=r_h;sec_l=r_l;}}else //个位为0而已{sec_h--;sec_l=9;}}else{sec_l--;}L1602_char(2,8,sec_h+0x30);L1602_char(2,9,sec_l+0x30);}else{count++;}TH0=0x4c;TL0=0x00;TR0=1;}#endif(4)lcd_1602.h#ifndef _lcd_1602_h#define _lcd_1602_h#include "define.h"#include "delay.h"uchar Convert(uchar In_Date){uchar i, Out_Date = 0, temp = 0;for(i=0; i<8; i++){temp = (In_Date >> i) & 0x01;Out_Date |= (temp << (7 - i));}return Out_Date;}/*写命令*/void enable(uchar del){P0 = Convert(del);RS = 0;RW = 0;E = 0;delay();E = 1;delay();}/*写数据*/void write(uchar del){P0 = Convert(del);RS = 1;RW = 0;E = 0;delay();E = 1;delay();}/*写字符*/void L1602_char(uchar hang,uchar lie,char sign) {uchar a;if(hang == 1) a = 0x80;if(hang == 2) a = 0xc0;a = a + lie - 1;enable(a);write(sign);}/*写字符串*/void L1602_string(uchar hang,uchar lie,uchar *p) {uchar a;if(hang == 1) a = 0x80;if(hang == 2) a = 0xc0;a = a + lie - 1;enable(a);while(1){if(*p == '\0') break;write(*p);p++;}}#endif。

基于STCC单片机的智能交通灯设计设计一个基于STCC单片机的智能交通灯系统,该系统可以根据路况和交通流量实时调整交通灯的信号,以提高交通效率和减少交通事故。
系统设计概述:该智能交通灯系统由三个主要部分组成:道路监控模块、数据处理模块和信号控制模块。
1.道路监控模块:该模块通过使用传感器(如图像传感器、红外传感器等)来监测道路上的车辆数量和流量。
传感器将车辆数量和流量信息传输给数据处理模块进行分析。
2.数据处理模块:数据处理模块接收道路监控模块传来的数据,并根据设定的算法进行数据处理。
该模块分析车辆数量和流量信息,以及其他相关数据,例如时间、天气和特殊事件等。
根据这些信息,数据处理模块可以确定交通信号灯应该如何调整。
3.信号控制模块:信号控制模块基于数据处理模块提供的分析结果,控制交通灯的信号。
该模块可以控制红、黄、绿三种信号灯的亮灭,以指示车辆前行、减速或停止。
这些信号灯可以通过使用有效的算法(如时间片、车辆优先级等)来调整,以最大程度地优化交通流量和减少拥堵。
这个系统具有以下几个关键特点:1.实时性:所有模块都能够实时高效地处理数据,并基于当前的交通情况进行决策。
2.灵活性:数据处理模块可以根据不同的条件和环境调整交通灯的信号,以适应特定情况。
3.高效性:通过实时分析交通流量和调整信号灯,可以优化交通流动,减少拥堵和等待时间。
4.安全性:系统可以根据特殊事件(如交通事故、紧急情况)调整信号灯,保证交通安全。
在设计中,我们可以使用STCC单片机作为主控制器,它具有强大的数据处理能力和多个输入/输出引脚,适合处理复杂的算法和与其他模块的数据交互。
单片机接收传感器数据并将其发送到数据处理模块进行分析,并根据结果控制信号灯的状态。
此外,我们可以利用具有较高分辨率和帧率的图像传感器来检测道路上的车辆数量和流量,利用红外传感器检测车辆的离来,以收集更准确的数据。
总结:基于STCC单片机的智能交通灯设计,该设计通过道路监控模块、数据处理模块和信号控制模块实现交通灯信号的实时调整。

学年论文题目:基于STC89C52RC单片机交通灯设计与实现学院:计算机科学与工程学院专业:计算机科学与技术(物联网方向)学生姓名:钟昌材学号:201171060149指导教师:黄萍目录1绪论 (1)1.1背景 (1)1.2城市交通的作用 (1)1.3国内外交通系统发展现状及存在的主要问题 (2)1.4城市交通解决的主要途径 (3)2基础知识 (4)2.1信号控制方式的分类 (4)2.2交通规则介绍 (4)2.3交通信号控制硬件设备简介 (4)2.4交通信号控制系统信息传输系统简介 (5)2.5常用交通标志简介 (5)2.6交通信号控制原理 (6)3系统总体设计 (7)3.1设计方案 (7)3.2总体设计 (8)3.2.1功能概述 (8)3.2.2系统构成 (8)4系统硬件设计 (9)4.1交通灯通行模式及行车方向指示 (9)4.2各单元电路模块功能 (100)4.2.1时钟电路模块 (10)4.2.2复位电路模块 (10)4.2.3主控制系统模块 (11)4.2.4交通灯输出控制模块 (12)4.2.5时间显示电路模块 (13)4.2.6系统电源模块电路 (13)4.2.7按键输入模块 (14)5系统软件设计 (15)5.1软件总体流程图 (15)6系统调试分析及结果 (16)6.1电路板实物的制作 (16)6.1.1印制电路板PCB图的绘制 (16)6.1.2实物的制做 (16)6.2系统硬件调试 (17)6.3系统软件调试 (17)6.4系统总体调试 (17)7结论 (18)致谢 (19)参考文献 (20)附录 (21)附录A:元器件清单 (21)附录B:总体电路原理图、PCB、仿真图 (21)附录C:程序 (23)摘要交通灯控制系统是城市道路管理中极为重要的一个环节,其在加强道路交通管理,减少交通事故的发生,提高道路使用效率等方面具有不可替代的作用。
近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制技术日益更新。

在城市的十字路口,车辆前后移动,行人交通繁忙,车行道,人们非常人性化,一切都在秩序之中,依靠一个稳定有序的交通信号灯,根据一定的规则引导行人和车辆。
交通。
单片机和微电子技术作为核心和信息技术的交通灯控制系统,单片机的内部输出信号、控制电路和保护电路自动运行代码。
1 交通信号控制和无线传感器无线传感器具有成本低、体积小、能够将现场实时路况信息和交通信息传输到监控现场的优点,非常适合智能交通控制系统。
无线传感器网络在智能交通系统中的应用具有许多优点。
例如,由于传感器本身的尺寸小,智能交通系统的维护和施工相对容易,智能交通系统的扩展能力强。
该无线传感器具有良好的分布式检测和计算机同步与合作,便于交通条件的综合控制,避免了信息丢失造成的交通拥塞。
2 基于单片机的交通信号控制系统当车辆或行人在交叉口时,交叉口信号灯的指挥状态应为绿色、红色和其他车辆。
或者当行人在交叉路口时,交通灯应当是绿色的和红色的。
交通冲突应该是红色和绿色的。
当交通灯的状态即将改变时,将有数字管显示器,其对灯的当前状态进行计数,特别是当绿光变为红色时,将存在3秒黄色光警告以驱动车辆。
因此,使用单片机来控制交通灯主要是通过每个灯的计时器和数字显示定时,当时间到达时,即,通过数据端口发送控制信号,改变当前交通灯打开和关闭,然后改变车辆的交叉点和行人的状态。
2.1 交通信号控制系统框架基于单片机的交通信号控制系统可以采用51系列单片机作为控制系统,但由于51单片机提供较少的数据接口,单的C。
控制系统的控制接口。
用户可以根据需要选择扩展芯片的数量,并通过发送控制字改变工作模式。
一般交叉口的交通信号灯需要指导方向、南北道路和交通,每个指挥行人和机动车需要两路交通,指挥机动车和数码管显示线路需要总共四套交通信号灯(前后均为同一交通光显示电路,左前为同一交通光显示电路,左前为同一交通光显示电路,左前为同一交通光显示电路,右前为同一交通光显示电路,右后为同一交通灯,车辆右侧为绿色,通常在路上,不考虑设计,并引导八组交通灯和行人数码管显示电路。

基于STC89C52单片机的交通灯设计摘要一个完整的交通灯相当于一个简单的单片机系统,该系统有交通灯设置电路、单片机、显示电路等构成。
信号灯控制的实现是通过电路与汇编程序的结合来完成,其中信号灯的模拟采用了发光二极管,发光二极管有熄灭、点亮和闪烁三种信号,其中闪烁信号的产生运用了延时程序来实现,而时间倒数方面引进了LED数字显示,克服了人们在等待时的心急的心情,减少了红灯未灭,闯红灯的现象。
电路部分原理图是通过用 DXP 软件绘制设计,汇编程序的设计与调试都在KEIL上完成。
最后使用DXP软件上的虚拟元件来代替所有的电路元件完成整个系统的调试和仿真,这样就大大保证了焊制硬件实物能正常运行。
本系统功能设计完善,采用AT89C51单片机为核心,具有实用,方便,灵活的特点。
随着电子技术的广泛应用,车辆日益增多将成为一种发展趋势,所以要有一套安全可靠的交通指示灯。
本设计以单片机AT89S52为控制核心,以红、绿、黄三种LED发光管作为直行和左右拐弯以及行人通行的指示,以LED数码管作为倒计时指示,完成了题目要求的所有功能。
在此基础上增设了LED灯和数码管实时显示系统各种状态,还可根据交通拥挤情况分别设置主干道和次干道的通行时间以及紧急情况时可根据需要手动设置某干道车辆通行状态,紧急情况结束后再转成自动状态,并对系统机械结构进行了优化设计,整体性好,人性化强、可靠性高。
关键词:单片机;交通灯;显示目录摘要 (2)1绪论 (5)1.1 交通灯的历史和现状 (5)1.2 单片机相关介绍 (5)2 系统设计 (6)2.1 课程内容 (6)2.2 系统硬件设计部分 (6)2.2.1 单片机系统 (6)2.2.2 复位电路 (7)2.2.3 晶振电路 (8)2.2.4 交通灯演示系统 (8)2.2.5 电源供电电路 (9)2.2.6 74HC573的功能 (9)2.2.7 发光二极管 (11)2.2.8 数码管 (12)3 软件设计 (12)4设计结果与分析 (16)4.1 proteus简介 (16)4.2 proteus仿真过程 (16)4.3 制板印制电路板PCB (18)4.3.1 DXP简介 (18)4.3.2 电路原理图制作 (18)4.3.3 PCB制作 (19)5实物图 (22)5.1 印制电路板概述 (22)5.1.1 印制电路板 (22)5.1.2 印制电路板结构 (22)5.1.3 印制电路板的种类 (22)5.2 印制电路板流程 (23)5.3 元器件安装与焊接 (24)5.3.1 手工安装 (24)5.3.2 手工焊接 (24)6 系统调试 (26)6.1 断电调试 (26)6.2 通电调试 (26)6.3 基本要求部分的测试与分析 (27)7 结论 (27)参考文献 (28)1 绪论今天,红绿灯安装在各个道口上,已经成为疏导交通车辆最常见和最有效的手段。

基于单片机的智能交通灯的设计交通灯是城市交通管理中不可或缺的一部分,它对于保障道路交通安全、提高交通效率起着至关重要的作用。
传统的交通灯通常采用固定的时间设置,无法根据实时的交通流量进行灵活调整,导致交通拥堵和资源浪费。
为了解决这一问题,基于单片机的智能交通灯应运而生。
单片机是一种集成在一块芯片上的微型计算机,具有体积小、成本低、性能可靠等优点,非常适合用于控制交通灯系统。
在基于单片机的智能交通灯设计中,需要考虑硬件电路设计、软件程序编写以及交通流量检测等多个方面。
硬件电路设计是整个系统的基础。
首先,需要选择合适的单片机型号,如常见的STC89C52 单片机。
它具有足够的存储空间和处理能力,可以满足交通灯控制的需求。
其次,要设计交通灯的显示电路,通常使用发光二极管(LED)来表示红、黄、绿三种颜色的信号灯。
通过控制单片机的引脚输出高低电平,可以实现LED 的点亮和熄灭。
此外,还需要考虑电源电路、时钟电路、复位电路等辅助电路的设计,以确保单片机能够正常工作。
为了实现智能控制,还需要对交通流量进行检测。
常用的检测方法有地感线圈检测、视频检测和红外检测等。
地感线圈检测是在道路下埋设感应线圈,当车辆通过时会引起线圈电感的变化,从而检测到车辆的存在。
视频检测则是通过摄像头拍摄道路画面,利用图像处理技术分析车辆的数量和速度。
红外检测是利用红外线传感器检测车辆的通过。
根据实际情况选择合适的检测方法,并将检测到的交通流量信息传输给单片机进行处理。
软件程序编写是智能交通灯的核心部分。
通过编写 C 语言或汇编语言程序,实现对交通灯的控制逻辑。
在程序中,需要根据交通流量的变化调整信号灯的时间。
例如,当某一方向的车流量较大时,适当延长该方向的绿灯时间,以减少车辆等待时间,提高交通效率。
同时,还要考虑特殊情况的处理,如紧急车辆优先通过、故障报警等。
在实际设计中,还需要考虑系统的可靠性和稳定性。
采取抗干扰措施,如电源滤波、信号隔离等,以防止外部干扰对系统造成影响。

单片机与嵌入式系统作品设计报告专业:电气工程及自动化摘要根据STC10F04单片机的特点及交通灯在实际控制中的特点,本文提出一种用单片机自动控制交通灯及时间显示的方法。
同时给出了软硬件设计方法,设计过程包括硬件电路设计和程序设计两大步骤,对在单片机应用中可能遇到的重要设计问题都有涉足。
本文对十字路口状态预设为三种,一种是正常状态,一种是紧急状态,另一种是方程式状态。
增设路段遇忙调整时方程式控制状态和紧急情况处理模块,通过手动控制开关按钮A0和A1方便系统在正常状态和紧急状态、方程式控制间来回切换,进一步完善了交通灯控制系统。
并分别用红、黄、绿灯的不同组合来指挥两个方向通车与禁行,用LED数码管作为倒计时指示,实时的控制当前交通灯时间使LED显示器进行倒计时工作并与状态灯保持同步,在保持交通安全的同时最大限度的提高交通能顺畅交替运行。
本文介绍了控制基本原理以及控制的表现,同时,论述了系统中交通现状、交通管理、交通规则及背景信息。
关键词:自动控制,时间显示器,外部中断,延时,方程式控制AbstractAccording to the characteristics of single-chip STC10F04 and traffic lights in the actual control of the characteristics of this paper, a single-chip automatic control with traffic lights and the method of time display. At the same time, given the hardware and software design methodology, design process, including the hardware circuit design and program design two major steps in the single-chip applications that may be encountered in the design of the important issues are involved. In this paper, the default state of the crossroads for three, one is the normal state is a state of emergency, and the other is a state formula. Additional sections of busy status adjustment formula and an emergency control module Through the manual control switch button convenience A0 and A1 system in the normal state and a state of emergency, the equation between the control switch back and forth, and further improve the traffic light control system. And were red, yellow and green light to direct different combinations of traffic in both directions and cut-line, with LED digital tube as a countdown to the instructions, real-time control of the current time for traffic lights to LED countdown display work and to keep pace with the state of light in the to maintain safety while minimizing the increase in traffic to alternate running smoothly. This paper introduces the basic principles of control, as well as the performance of control at the same time, traffic on the system status, traffic management, traffic regulations and background information.Key words:automatic control; time display; external interrupt; delay; control equation目录摘要 (1)Abstract (3)目录 (4)1 绪论 (5)1.1 交通灯研究的背景和意义 (5)1.2 交通灯国内外发展概况 (5)2 系统工作原理及设计方案 (8)2.1 交通灯的工作原理 (8)2.2 交通灯总体设计方案 (8)3 硬件系统设计 (12)3.1 硬件系统组成 (12)3.1.1 单片机最小系统 (12)3.1.2 信号显示驱动电路 (16)3.1.3 键盘输入电路 (17)4 交通灯系统详细设计 (19)4.1 软件总体设计思想 (19)4.2 交通控制算法实现 (21)4.3 系统初始化模块 (22)4.4信息显示模块 (23)4.4.1 信号灯模块 (23)4.4.2 LED倒计时显示子程序 (27)4.5键盘扫描模块 (30)5 调式总结 (38)6 致谢 (39)参考文献 (40)附录 (41)附录一程序清单 (41)附录二交通灯PCB图 (49)附录三交通灯电路原理图 (50)1 绪论1.1 交通灯研究的背景和意义交通是城市经济活动的命脉,对城市经济发展、人民生活水平的提高起着十分重要的作用。

摘要一个完整的交通灯相当于一个简单的单片机系统,该系统有交通灯设置电路、单片机、显示电路等构成。
信号灯控制的实现是通过电路与汇编程序的结合来完成,其中信号灯的模拟采用了发光二极管,发光二极管有熄灭、点亮和闪烁三种信号,其中闪烁信号的产生运用了延时程序来实现,而时间倒数方面引进了LED数字显示,克服了人们在等待时的心急的心情,减少了红灯未灭,闯红灯的现象。
电路部分原理图是通过用PROTEL软件绘制设计,汇编程序的设计与调试都在KEIL上完成。
最后使用PROTEUS软件上的虚拟元件来代替所有的电路元件完成整个系统的调试和仿真,这样就大大保证了焊制硬件实物能正常运行。
本系统功能设计完善,采用AT89C51单片机为核心,具有实用,方便,灵活的特点。
随着电子技术的广泛应用,车辆日益增多将成为一种发展趋势,所以要有一套安全可靠的交通指示灯。
关键字:AT89C51;LED显示;交通灯目录第一部分设计任务 (3)1.1 设计题目及要求 (3)1.2 备选方案设计与比较 (3)1.2.1方案一 (3)1.2.2方案二 (3)1.2.3方案三 (3)1.2.4各方案分析比较 (3)第二部分系统硬件平台的设计 (4)2.1 总体设计方案说明 (4)2.1.1 设计原理分析 (4)2.2 单片机概述 (5)2.2.1 单片机处理器 (5)2.3 硬件电路的设计 (9)2.4 时钟电路设计 (9)2.4.1 时钟电路及参数计算 (9)2.4.2 工作原理和功能说明 (9)2.5 复位电路设计 (10)2.5.1 复位电路及参数计算 (10)2.5.2 工作原理和功能说明 (10)第三部分系统软件的设计与实现 (10)3.1 程序框图及主程序流程图 (10)3.1.1 软件设计思路 (10)3.1.2 程序框图如图5所示 (11)3.1.3 主程序设计 (11)3.1.4 定时中断子程序 (11)3.2 十字路口交通灯仿真 (12)3.2.1 仿真软件简介 (12)3.2.2 仿真电路图 (13)3.2.3 仿真结果(附图) (13)第四部分安装调试与性能测量 (14)4.1 电路安装 (14)4.2 系统软件、硬件调试 (15)4.2.1 调试步骤及测量数据 (15)4.2.2 故障分析及处理 (16)参考文献: (17)课程设计总结 (17)注:报告正文的排版: (18)第一部分设计任务1.1 设计题目及要求1、通过单片机课程设计,熟练掌握单片机C语言的编程方法,将理论联系到实践中去,提高我们的动脑和动手的能力。
基于S T C90C51单片机的交通灯设计1、设计题目基于STC90C51单片机的智能交通灯设计2、设计要求2.1、系统功能(1)按照交通规则,控制宝田路和前进路方向及其人行道的交通信号灯(红﹑黄﹑绿)的通断。
(2)设置信号灯的通断时间。
(3)可人工干预,使交通信号灯开启不同模式。
2.2、性能参数:(1)电源:5VDC(2)LED灯电流:10mA(3)定时时间:10s-200s3、总体设计根据系统功能和设计要求,系统采用单片机控制的方案,基于HC6800S开发板,由STC90C51,74HC573,交通灯模块,动态数码显示管以及4*2独立按键组成。
3.1系统工作原理在十字路口,分为宝田路和前进路,正常情况下,在任一时刻只有一个方向通行,另一方向禁行,持续一定时间,经过短暂的过渡时间,将通行禁行方向对换。
其具体状态如下:?(1)普通模式:状态一:宝田路通行阶段(宝田路及其人行道亮绿灯30秒、前进路及其人行道亮红灯30秒);状态二:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒);状态三:前进路通行阶段(前进路及其人行道亮绿灯30秒、宝田路及其人行道亮红灯30秒);状态四:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒);返回到状态一。
(2)高峰期模式(设宝田路为主干道):按下按键2(key2),开启高峰期模式;状态一:宝田路通行阶段(宝田路及其人行道亮绿灯60秒、前进路及其人行道亮红灯30秒);状态二:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒);状态三:前进路通行阶段(前进路及其人行道亮绿灯30秒、宝田路及其人行道亮红灯30秒);状态四:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒);返回到状态一;按键2释放,回到普通模式。
(3)紧急模式:按下按键1(key1),开启紧急模式,所有道路及其人行道均红灯亮,数码管不显示。
释放按键1,回到普通模式。
3.2?单片机交通控制系统的功能要求?本设计能模拟基本的交通控制系统,用红绿黄灯表示禁行,通行和等待的信号发生,还能进行倒计时显示,通行时间调整功能和紧急情况全面禁行。
?(1)倒计时显示?倒计时显示可以提醒驾驶员在信号灯灯色发生改变的时间、在“停止”和“通过”两者间作出合适的选择。
驾驶员和行人普遍都愿意选择有倒计时显示的信号控制方式,并且认为有倒计时显示的路口更安全。
倒计时显示是用来减少驾驶员在信号灯色改变的关键时刻做出复杂判断的一种方法,它可以提醒驾驶员灯色发生改变的时间,帮助驾驶员在“停止”和“通过”两者间作出合适的选择?。
?(2)时间的设置?本设计中对时间进行了人为控制设置,正常情况下宝田路和前进路的绿灯通行与红灯禁行时间均设置为30秒、黄灯等待时间设置为5秒。
假设前进路为主干道,考虑到主干道在上下班高峰期车流量和人流量较大,人为增加开关K2。
当K2开启时,主干道前进路上绿灯通行时间和宝田路上的红灯禁行时间更改为60秒,其余设置均不变;当K1关闭时,又恢复正常情况下的时间设置。
(3)紧急情况全面禁行本设计中在紧急情况下增加了全面禁行状态,增加开关K1。
当K1开启时,宝田路和前进路及其各自人行道均量红灯禁行;当K1关闭时,交通灯恢复正常状态。
4、详细设计—硬件设计为了实现本设计要求的具体功能,选用STC90C51单片机及外围器件构成最小控制系统,10个发光二极管分别分成两组红黄绿和两组红绿灯构成信号灯指示模块,4个LED动态数码管构成各个方向倒计时显示模式,两个按键分别用来设置高峰期模式和紧急模式。
4.1、单片机系统设计单片机设计交通灯控制系统,可用单片机直接控制信号灯的状态变化,基本上可以指挥交通的具体通行,当然,接入LED数码管就可以显示倒计时以提醒行使者,更具人性化。
单片机上电后,系统进入正常工作状态,执行交通灯状态显示控制,同时将时间数据倒计时输入到LED数码管上实时显示。
HC6800S整体结构视图:STC90C51内部结构图:STC90C51芯片引脚图:4.2、LED数码管显示屏设计LED动态数码管的显示原理为:2位8段数码管电路采用“共阳”连接驱动代码,如右图所示。
段码和位码,段码即段选信号SEG,它负责数码管显示的内容,图中a~g、dp组成的数据(a 为最低位,dp 为最高位)就是段码。
位码即位选信号DIG,它决定哪个数码管工作,哪个数码管不工作。
LED数码管显示代码表如下表所示:显示数值dp,g,f,e,d,c,b,a代码0011111110x3f1000001100x064.3、交通灯设计HC6800S开发板中交通灯模块原理图如下图所示,宝田路红黄绿灯及其人行道上的红绿灯和前进路上的红黄绿灯由JP1控制,前进路人行道上的红绿灯由J22控制。
5、详细设计—软件设计5.1、软件开发工具和环境keil C51 μVision6.125.2、软件总体设计程序流程简图如下:程序源代码如下:while(1){if(S==71)S=0;/*宝田路通行,宝田路绿灯亮30秒*/if(S<31){Data[0]=0x00;Data[1]=0x00;Data[2]=duan[(30-S)/10];Data[3]=duan[(30-S)%10];Data[4]=0x00;Data[5]=0x00;Data[6]=Data[2];Data[7]=Data[3];Display();led=0xFF; // 将所有的灯都熄灭RED00=1;GREEN00=1;GREEN10=0; //宝田路人行道绿灯亮GREEN11=0; //宝田路绿灯亮RED00=0; //前进路人行道红灯亮RED01=0; //前进路红灯亮}/*黄灯阶段,5秒*/else if(S<36){Data[0]=0x00;Data[1]=0x00;Data[2]=duan[(35-S)/10];Data[3]=duan[(35-S)%10];Data[5]=0x00;Data[6]=Data[2];Data[7]=Data[3];Display();led=0xFF; //将所有的灯都熄灭RED00=1;GREEN00=1;RED10=0; //宝田路人行道红灯亮YELLOW11=0; //宝田路黄灯亮RED00=0; //前进路人行道红灯亮YELLOW01=0; //前进路黄灯亮}/*前进路通行,前进路绿灯亮30秒*/else if(S<66){Data[1]=0x00;Data[2]=duan[(65-S)/10]; Data[3]=duan[(65-S)%10]; Data[4]=0x00;Data[5]=0x00;Data[6]=Data[2];Data[7]=Data[3]; Display();led=0xFF;RED00=1;GREEN00=1;RED10=0;RED11=0;GREEN00=0;}/*黄灯阶段,5秒*/else {Data[0]=0x00;Data[1]=0x00;Data[2]=duan[(70-S)/10];Data[3]=duan[(70-S)%10];Data[4]=0x00;Data[5]=0x00;Data[6]=Data[2];Data[7]=Data[3];Display();led=0xFF;RED00=1;RED10=0;YELLOW11=0;RED00=0;YELLOW01=0;} }(2)按键检测流程图如下:NYvoid delayms(){ //延时子函数,延时约10msuint a,b;for(a=10;a>0;a--)for(b=110;b>0;b--);}(3)紧急模式程序流程简图如下:程序源代码如下:/*按下按键1,开启紧急模式,所有红灯亮,数码管不显示*/ if(key1==0){delayms(); //去抖延时if(key1==0){Data[0]=0x00;Data[1]=0x00;Data[2]=0x00;Data[3]=0x00;Data[4]=0x00;Data[5]=0x00;Data[6]=0x00;Data[7]=0x00;Display();led=0xFF;RED00=1;GREEN00=1;RED10=0;RED11=0;RED00=0;RED01=0;while(!key1); //按键1释放} }keyscan();}}(4)高峰模式程序流程简图如下:程序源代码如下:/*按下按键2,开启上下班高峰期模式,主干道宝田路绿灯时间为60秒*/ void keyscan(){if(key2==0){delayms(); //去抖延时if(key2==0){while(1){if(key2!=0) break; //当按键2释放,跳出循环if(M==101)M=0;if(M<61){Data[0]=0x00;Data[1]=0x00;Data[2]=duan[(60-M)/10]; Data[3]=duan[(60-M)%10]; Data[4]=0x00;Data[5]=0x00;Data[6]=Data[2];Data[7]=Data[3]; Display();led=0xFF;RED00=1;GREEN00=1;GREEN10=0;GREEN11=0;RED00=0;RED01=0;}else if(M<66){Data[0]=0x00;Data[1]=0x00;Data[2]=duan[(65-M)/10];Data[3]=duan[(65-M)%10];Data[4]=0x00;Data[5]=0x00;Data[6]=Data[2];Data[7]=Data[3];Display();led=0xFF;RED00=1;GREEN00=1;YELLOW11=0;RED00=0;YELLOW01=0;}else if(M<96){Data[0]=0x00;Data[1]=0x00;Data[2]=duan[(95-M)/10];Data[3]=duan[(95-M)%10];Data[4]=0x00;Data[5]=0x00;Data[6]=Data[2];Data[7]=Data[3];Display();RED00=1;GREEN00=1;RED10=0;RED11=0;GREEN00=0;GREEN01=0;}else {Data[0]=0x00;Data[1]=0x00;Data[2]=duan[(100-M)/10];Data[3]=duan[(100-M)%10];Data[4]=0x00;Data[5]=0x00;Data[6]=Data[2];Data[7]=Data[3];Display();led=0xFF;RED00=1;GREEN00=1;RED10=0;YELLOW11=0;RED00=0;YELLOW01=0;} }while(!key2); //等待按键释放}}}5.3、定时程序设计进入主程序后,首先要对定时器和中断有关的寄存器初始化。