Calypso4.2 训练手册(基础篇)
- 格式:xls
- 大小:7.03 MB
- 文档页数:111

QUICK GUIDE 快速应用指南WELCOME!欢迎!感谢并祝贺您选择Aixplorer®新声威特种鉴别诊断超声系统Aixplorer®新声威特种鉴别诊断超声系统包含以下文本文件:• 快速应用指南• 用户指南本《快速应用指南》包括关于产品使用的基础信息。
并不能替代《用户指南》。
为确保您正常、安全的使用本产品,请仔细阅读《用户指南》。
Aixplorer®新声威特种鉴别诊断超声系统的设计保证将临床操作和患者的安全风险降至合理可行的最低范围。
区域客服代表能够帮助解决您的疑问。
请与区域销售或客服人员联系,获得更多辅助信息。
GETTING STARTED系统开启1. 开/关系统开机按下位于机身后方的I 键按下控制面板左侧扬声器旁的On/Off 键系统启动关机按下控制面板上的On/Off 键主屏幕显示关机菜单选择Yes。
按下机身后方的0 键关闭系统电源。
2. 进入患者信息列表按下控制面板上的Patient 键。
您将看到以下内容:·主屏幕显示患者信息列表·触摸屏显示键盘使用轨迹球和/或键盘箭头移动光标位置。
填写相应数据。
GETTING STARTED系统开启触摸屏上会显示正在输入的文字(键盘上方的白色区域内)。
使用backspace 键删除刚刚输入的文字。
将光标移至需要删除的文字,然后单击Delete LINE,用来删除已经输入的文字。
编辑完成后,按下Patient 键退出患者信息列表。
3. 选择探头和预设置按下控制面板上的Probe 键。
触摸屏上显示探头选项。
单击tab 选择需要的应用系统。
触摸屏上将显示与此应用系统相关的探头。
单击preset 选择适合的探头和预设置条件。
系统将加在选定的预设置条件,并进入实时B-超成像模式。
更多关于系统开启、患者信息或探头选择的详细信息,敬请参考《用户指南》。
B-MODE IMAGINGB-超成像调节以下参数,以获得拥有最佳细节显示和更高分辨率的稳定图像。
理解
一般
不理解
□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□
□
□
理解
一般
不理解
□□□□□□□□□□□□□□□
空转轴、面转轴及坐标系原点常见类型坐标系建立方法坐标系的变换
机器坐标系、基本坐标系、辅助坐标系和元素坐标系
测量程序元素自动识别基本功能探针校准
手动/自动探针更换标准球主探针
探针系统与探针校准模式
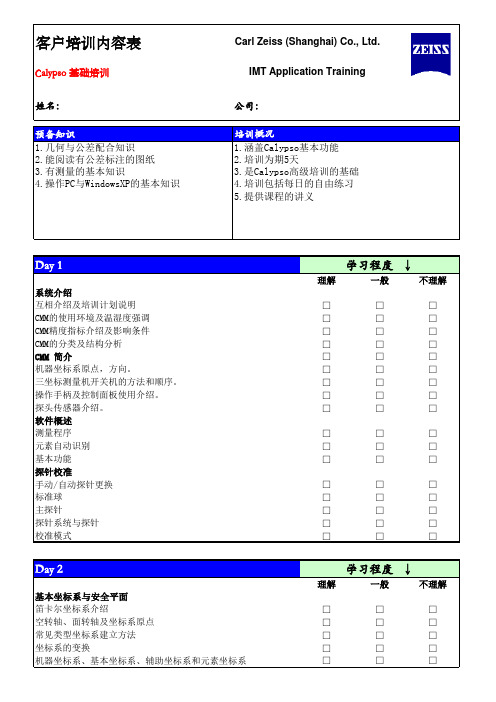
Day 1
学习程度 ↓
预备知识
1.涵盖Calypso基本功能姓名:
学习程度 ↓
系统介绍
互相介绍及培训计划说明CMM的分类及结构分析CMM 简介
机器坐标系原点,方向。
三坐标测量机开关机的方法和顺序。
操作手柄及控制面板使用介绍。
探头传感器介绍。
软件概述2.培训为期5天
3.是Calypso高级培训的基础
4.培训包括每日的自由练习
5.提供课程的讲义
2.能阅读有公差标注的图纸公司:
培训概况
1.几何与公差配合知识Day 2
笛卡尔坐标系介绍
3.有测量的基本知识
4.操作PC与WindowsXP的基本知识
CMM的使用环境及温湿度强调CMM精度指标介绍及影响条件基本坐标系与安全平面
姓名:公司:
姓名:公司:。
Calypso 基本培训大纲一.三坐标(CMM)简介及其维护保养1.硬件1.1 型号1.2 机器坐标系及零点1.3 量程1.4 精度1.5 机器连接方式2.软件2.1 软件模块2.2 软件版本3.使用环境3.1温度3.2湿度3.3气源3.4气压3.5电源4.开关机4.1开机过程4.1.1确认气压满足要求4.1.2开启稳压源及UPS4.1.3打开控制柜电源开关4.1.4打开驱动电源开关4.1.5等待直至控制面板灯不再闪烁4.1.6打开机器驱动开关4.1.7双击打开软件4.1.8机器回零4.2关机过程4.2.1探头移动到机器右上角,但三个方向都不到限位4.2.2关闭软件4.2.3关闭驱动开关4.2.4关闭驱动电源开关4.2.5关闭控制柜电源4.2.6关闭稳压源及UPS5.简单维护保养5.1每日酒精清理导轨5.2导轨上不能摆放物品5.3不要挤压导轨二.探针系统1.探头介绍1.1 探头类型1.2 探头允许最大承重1.3 探头允许最大接长2.手动装卸探针2.1 探针组装2.2 探针定义2.2.1 探针组定义2.2.2 测针定义2.2.2.1 旋转探头2.2.2.2 增加测针2.3 探针安装2.4 探针卸载3.手动校准探针3.1两种类型探针校准3.1.1主探针校准3.1.2工作探针校准3.2探针校准目的3.2.1获取红宝石球径3.2.2探针间的相互位置关系3.3校准模式3.3.1探针被动校准3.3.2探针几何再校准3.4校准范围3.5校准判断3.5.1主探针s<= 0.5μ3.5.2工作探针s<= 1μ3.6校准超差分析3.6.1红宝石球或标准球上灰尘3.6.2探针或标准球没有紧固3.6.3红宝石球或标准球损坏3.6.4手动探测第一点偏差大3.7校准周期3.7.1一般1次/1,2周3.7.2根据探针使用频率而定4.自动装卸探针4.1换上主探针4.2增加库位盒4.3定义主探针长度、4.4定义库位盒位置4.5定义库位盒探针4.6定义接近参数4.7自动取放探针5.自动校准探针5.1新建程序5.2建立机器坐标系5.3增加“探针校准”特性5.4选择校准的探针5.5定义“缺省输出报告”保存路径5.6选择“仅用中间点”模式5.7运行程序三.建立坐标系1.建立基本坐标系1.1空转轴1.2面转轴1.3原点2.建立附加坐标系3.坐标系的平移旋转3.1平移3.2角度旋转3.3距离旋转4.坐标系的种类4.1基本坐标系4.2附加坐标系4.3元素坐标系4.4机器坐标系四.元素采集1.几何元素1.1点1.22D直线1.3面1.4圆1.5圆柱1.6圆锥1.7球1.8椭圆1.9圆槽1.10方槽1.11圆环1.12对称点1.13对称面1.14台阶平面1.15半经点1.16球点1.17圆锥圆2.构造元素2.1垂直线2.2相交2.3对称2.4边界点2.5投影2.6相切2.7最小坐标2.8最大坐标2.9最小元素2.10最大元素2.11平均结果2.12圆锥计算2.13平移平面2.143D直线2.15回叫2.16回叫元素点2.17回叫一个元素2.18阵列2.18.11D直线阵列2.18.22D直线阵列2.18.3回转阵列2.18.4环形阵列五.元素策略及评定1.圆的策略1.1点策略1.2宏程序1.3圆路径策略1.4螺旋线策略2.圆柱的策略2.1点策略2.2宏程序2.3圆路径策略2.4母线策略2.5螺旋线策略3.平面的策略3.1点策略3.2多义线策略3.3圆路径策略3.4网格线策略3.5环形线策略4.元素的评定4.1计算方法4.2探针半径修正4.3滤波4.4去除粗大点六.输出特性1.尺寸输出1.1基本1.1.1X1.1.2Y1.1.3Z1.1.4直径1.1.5半径1.1.6半径测量1.1.72点直径1.1.8轴线长度1.1.9极半径1.1.10极角1.1.11极高1.2角度1.2.1投影角I1.2.2投影角II1.2.3圆锥角1.2.4半锥角1.2.5倾斜角1.2.6旋转角1.2.7元素角1.3距离1.3.13D距离1.3.22D距离1.3.3笛卡尔距离1.3.4对称点距离1.3.5空间点距离1.3.6综合距离1.4其他1.4.1焦点1.4.1.1焦点笛卡尔坐标系XYZ值1.4.1.2焦点极坐标系RAH值1.4.2短径1.4.3短半径1.4.4槽长1.4.5槽宽1.4.6圆周齿距评定1.4.7线性阵列评定1.4.8最小结果1.4.9最大结果1.4.10平均值1.4.11结果元素2.形位公差输出2.1形状公差2.1.1圆度2.1.2参考圆度2.1.3平面度2.1.4参考平面度2.1.5直线度2.1.6参考直线度2.1.7圆柱度2.1.8面轮廓度2.1.9线轮廓度2.1.10形状度2.1.11曲线轮廓度2.2位置公差2.2.1位置度2.2.2同心度2.2.3同轴度2.2.4垂直度2.2.5平行度2.2.6倾斜度2.2.7对称度2.2.8跳动2.2.8.1径向跳动2.2.8.2轴向跳动3.元素夹角七.CNC编程及运行程序1.编程的步骤1.1查看图纸,组装并校准探针1.2建立工件坐标系1.3建立安全平面1.4采集测量元素1.5元素策略及评定设置1.6输出测量特性1.7安全五项检查1.7.1安全平面1.7.2安全距离1.7.3回退距离1.7.4探针组1.7.5探针1.8报告设置1.8.1报告格式选择1.8.2报告自动保存1.9调试程序1.10运行程序进行测量2.运行程序2.1点击运行程序图标2.2设置运行程序参数八.基于CAD模型编程1.导入CAD模型2.模型上采集元素3.编程九.报告设置1.报告格式修改2.报告表头修改3.报告保存路径修改十.数据备份及机器配置1.数据备份1.1inspection文件夹1.2config文件夹2.机器配置。
AAIAAOxygen 2操作手册0.1配图版Zcy2015/7/29基础设置Basic setup (4)1术语解释Terminology (5)3 O2界面视角控制Viewport Navigation (6)3.1 Buldozer控制 (6)3.2 Buldozer 菜单 (7)4 Pin 工具 (8)5 创建与选择对象 (9)6 编辑Editing (9)6.1 局部坐标Local Axis (10)6.2 隐藏与锁定Hiding and Locking (11)6.3测量Measuring (11)7 锐化与平滑边缘Sharp and Smooth Edges (12)8 导入与导出Import / Export (12)9 表面Surfaces (13)9.1纹理贴图Texture Mapping (13)9.1.1相邻贴图Neighbour Mapping (14)9.2UV展开UV unwrap (14)9.3资源库Resources Library (14)9.4MAT 插件(找不到) (15)10名称选集Named Selections (16)10.1代理对象Proxy objects (16)11属性Properties (18)11.2距离细节名称设定Resolution LOD named property (21)11.3可见几何体名称VIEW geometry named property (22)11.4面属性FACE property (22)11.5顶点属性Vertex Properties (23)12动作Animations (24)12.1动作角色优化Animated character optimize (24)12.2RTM回放 (25)12.3用户动作User animations (25)13模型细节图层LODs (26)13.1分辨率图层Resolution LODs (26)13.2几何图层Geometry LODs (27)13.2.1物理碰撞几何Collision Geometry (27)13.2.2击中几何FIRE Geometry (28)13.2.3人工智能识别几何VIEW Geometry (28)13.3阴影锥量图层ShadowVolume LOD (29)13.4损伤HitPoints (30)13.5地面接触点LandContact (30)13.6记忆层Memory (31)13.7路径Paths (31)13.8路径Roadway (31)13.9编辑EDIT LODs (32)14批处理脚本Automation (32)14.1宏Macro (32)14.2 快捷键List of Shortcuts (33)14.2.1 单键 (33)14.2.2 Ctrl+按键 (35)14.2.3 Ctrl+Shift+按键 (36)14.2.4 Alt+Keys (36)14.2.5 鼠标操作 (36)基础设置Basic setup外部浏览器路径External Viewer格式: C:\program files\bohemia interactive\arma\ArmA.exe -window -buldozer -nolandDLL Folder– O2程序目录Path for textures贴图路径–工作盘路径,作为贴图根路径(默认 P:\)Source Safe Database安全数据库源–登录 MicrosoftVisualStudioSource Safe database1术语解释Terminology点Point–空间中的独立点顶点Vertex–两个或更多面的交点边Edge - 两个顶点间的连接多边形Polygon–有任意边的平整表面三角面Triangle–三条边的面四边形Quad–四条边的面面Face–在O2 中可以是三角面或四边形法线Normal - 法线是垂直于平面上某一面的一条线,O2中它显示为在每个顶点上的蓝线骨骼Skeleton - 模型可活动部件的简化模型骨Bone–用于组成骨骼节点Section - 当图形卡(GPU)需要修改参数时会被创建。
智能手机开发Basic4ppc教程第一章Basic4ppc简介Basic4ppc是一种用于Windows Mobile移动设备开发应用程序的编程工具。
通过Basic4ppc 你能直接地开发在Pocket PC / Window Mobile或桌面电脑上的应用程序。
. Basic4ppc包括一可视化程序设计环境。
Basic4ppc应用程序可以把代码编译成可运行文件(EXE文件)而不需要其他运行库。
(Windows Mobile 2003 SE设备需要安装微软的Net Framework 1.0 )Basic4ppc支持:Pocket PC 2000, Pocket PC 2002, Smartphone 2003, Windows Mobile 2003, Windows Mobile5.0, Windows Mobile Smartphone 5.0, Windows Mobile Classic 6.0, Windows Mobile Standard 6.0 (智能手机) 和Windows Mobile Professional 6.0.1.1 Basic4ppc特色及优势可以在桌面或设备上编写程序代码,方便代码的调试。
桌面不需安装Windows Mobile虚拟机。
而且在桌面可以把代码编译成可执行文件,在设备上没有编译功能。
可视化的编成设计系统本身提供了大量的可视化控件,可以很方便的使用可视化方式直接绘制用户的图形界面,直观动态的调整位置,直到用户满意为止,不必用大量的代码来描述界面控件的外观和位置。
面向对象的编程思路。
事件驱动的编程机制。
可扩展性:系统提供了特殊的控件和函数,属性、方法和事件。
Basic4ppc 6.50版本引入了新概念的模块。
您可以把项目分割到几个模块里编写,更利于开发和维护大型项目和代码组件在不同项目中的重复使用。
每个模块可以包含任意数量的窗体、控件和对象。
自动完成功能(Ctrl+Space ) 键完善对所有关键字以及模块的支持。
PCL432Voltage CalibratorOperator’s ManualM1891/0994GENERAL DESCRIPTIONThe OMEGA®PCL432 Hand-Held Voltage Calibrator is designed to be a complete process voltagecalibrator delivering high accuracy in a small, easy to use package. Its microprocessor based circuitrygives the user a large number of input/output options and operating modes without unnecessarycomplexity.Commonly used outputs (up to 3) can be stored in the PCL432’s non-volitile memory for quick recall. In addition, an auto-step mode allows the calibrator to step through the selected setpoints at a user defined dwell time of 5 to 60 seconds.INSTALLATIONUNPACKINGRemove the Packing List and verify that you have received all equipment. If you have any questions about the shipment, please call the OMEGA Customer Service Department at 1-800-622-2378 or (203) 359-1660.When you receive the shipment, inspect the container and equipment for any signs of damage. Note any evidence of rough handling in transit. Immediately report any damage to the shipping agent.NOTE: The carrier will not honor any claims unless all shipping material is saved for theirexamination. After examining and removing contents, save packing material and carton in theevent reshipment is necessary.Check to see if your calibrator kit is complete. It should include:1. Carrying case (Qty=1)2. T est leads (Qty=1 set)3. 9V battery (Installed)4. Operator’s Manual (Qty=1)SET-UPBefore beginning, become familiar with the keypad layout and the configuration of the input/output jacks.Remember, these jacks are used in multiple configurations so pay careful attention to how the test leads are connected for the specific application.CJS0994RAF2BAOPERATING PROCEDURE1. Turn on power and select the desired range by depressing the “RANGE SELECT” key, then place theslide switch in the desired position (Read or Source).2. Connections are made as follows:Red Jack - Positive Input/OutputBlack Jack - Negative Input/Output3. The and keys adjust the output value up or down. Holding the ramp keys continuously forseveral seconds will increase the scroll rate. Going beyond the endpoints will cause the output to wraparound, thus allowing a quick return to either end of the scale.4. Three calibration points can be stored in non-volatile memory by scrolling to the desired output,depressing the Store key, and then the desired setpoint key.5. The auto step will automatically step through the stored setpoints at pre-defined intervals. When theauto-step key is first depressed, the display will indicate the dwell time (in seconds) between steps.The factory set value is 15 seconds but you can set this value, from 5 to 60 seconds, by usingthe and keys when the dwell time is being displayed. Once you have scrolled to the desireddwell time, release the or key and wait approximately 3 seconds until the calibrator begins toautomatically step through the 3 setpoints. The calibrator will continue the stepping process until anykey is pressed. Your chosen dwell time will remain in a non-volatile memory location until you chooseto change it.OPERATING CONSIDERATIONS AND PRECAUTIONS1. When operating in the voltage source mode, the PCL432 has the capability to drive loads up to 20 mAas shown in Figure 1.Minimum Resistance:200 mV Range - 10 ohm20 V Range - 1 KohmFigure 1 - Voltage Source Mode2. When reading a voltage, the PCL432 can measure over a range of 0-200 mV or 0-20 Volts.Connections are shown in Figure 2.Figure 2 - Voltage Loop ReadingsACCURACYThe PCL432 is checked against an NIST traceable reference before shipment to verify that each range falls within the 0.05%, ±1 count, of full scale accuracy specification. Long term accuracy should remain within 0.1%, ±1 count, of FSR. All of these ratings are based on a 25°C ambient temperature. A change of 10°C will cause approximately a 1000 ppm change (based on 100 ppm/C temp.) in the output or the equivalent of a 0.1% output change. Therefore, allowances must be made for error caused by wide temperature variations.SPECIFICATIONS Input/output Ranges0 to 200 mV 0 to 20 Volts Accuracy±0.05% ±1 LSD Maximum Load Driving±20 mA Operating Modes ReadorSource Operating T emperature0 to 50°C (32 to 122°F)Storage T emperature-20 to 60°C (-4 to 140°F)T emperature Stability0.01% F .S./°C Setpoints3 user programmed calibration points stored in non-volatile RAM.Power9V alkaline battery Auto Step FunctionT oggle through SP1, SP2 and SP3 with user defined display.Case Size1.43” x 3.15” x 5.7” (36.3 x 80.0 x 144.8mm)Weight 12 oz (340g)MAINTENANCEGenerally, with normal usage, this calibrator should hold its rated specifications for at least 6 months.Beyond this, it should remain within 0.05% of FSR over its useful life, provided it is not abused or tampered with. If after the stated warranty period, the device falls out of calibration, it can be returned to OMEGA Engineering, Inc. for re-calibration.}0-200.0 mV 0-20.00 V。
扫描式三次元软件操作手册台 湾 仪 器 行第一章操作流程4第二章开始Calypso / 结束Calypso5第三章主窗口介绍 ( 一 )8第四章回到机械坐标原点 ( Homing the CMM )10第五章安装和校正探头 ( Installing and Qualifying Probes )11第六章设定工件坐标系统 ( Defining the Base Alignment )20第七章移动,旋转和删除坐标系统28第八章设定安全平面 ( Setting the Clearance Planes )31第九章量测几何元素 ( Defining Part Features )38第十章几何元素窗口内的功能43第十一章特征的量测路径产生 - Strategy47第十二章特征评定区 ( 量测特征的结果是否公差内之评定 )51第十三章准备区其他功能介绍53第十四章执行CNC程序窗口57第十五章工件重置后 , 再执行CNC程序60第十六章档案 - 基本指令功能62第十七章几何元素的合成元素63第十八章特征计算 -- 尺寸67第十九章计算 -- 形状和位置68第二十章结果输出79第二十一章单位设定84第 二十二 章CAD档的应用85第二十三章工具栏编辑88第二十四章编辑报表表头89第二十五章以 Excel 输出报表92第二十六章重新叫回之前之量测结果97第二十七章曲线之量测 (选配)99第二十八章第 一 章 操 作 流 程开 始 Calypso回 到 机 械 座 标 原 点离 开 Calypso[开 始 Calypso] :一 , 硬件开机 :1. 打开气压 .2.打开MAINS ( 主电源 ) .3. 打开RUN ( 控制箱电源 ) , 并等操作盘上的灯 , 闪烁完毕 .4. 打开START ( 马达电源 ) .5. 选择AUTO ( 全速 ) 或 MAN ( 有速限 ) .二 , 软件开机 :1. 计算机开机 . 进入操作系统 .2. 点选 桌面的 Calypso 快捷方式 .3. 出现登入窗口 . 选择用户和输入密码 , 按 OK .4. 按" OK " . CMM 便会回归到左上角的机械坐标原点 .第 二 章 开 始 Calypso / 结 束 Calypso5. 进入Calypso 窗口后 . 开新档案 .6. 按 OK .7. 即可开始作量测 .注意 : 进入 Calypso 后 , 会同时开启 Traffic light , Scheme ACIS Interface Driver Extension ,Status Windows , 3个窗口 . 在执行Calypso期间 , 绝不可关闭任一窗口 , 否则会影响程序的执行 . [结束 Calypso] :一 , 软件关机 :1. 离开 Calypso .2. 计算机关机 .二 , 硬件关机 :依开机顺序反向关机 .* Traffic light 窗口 :程序执行CNC时 , 可" 取消 " , " 暂停 " ," 继续 " 的动作 .显示目前的坐标系统 , 刚开机时都是机械坐标系统( Machine Coordinate System ) .探头中心的坐标位置若已建立了工件坐标系统( Workpiece Coordinate System ) , 打勾后 , 便切换成工件坐标系统显示 .主要选单CAD 窗口:量测所产生的几何元素 -- 点 , 线 , 圆 ,平面 , 圆柱 , 曲线等 , 及加载的CAD档 ,会以图形显示在此区域 .按此图形即出现右图 ( 一 ) 的窗口 .此区为 " 预先准备区 " . 要做CNC量测前 ,图 ( 一 )要先完成此区的预备工作 ( 坐标系统的设定 ,安全平面的设定等 ) , 才能作量测 .按此图形即出现右图 ( 二 ) 的窗口 .量测所产生的几何元素 -- 点 , 线 , 圆 ,平面 , 圆柱 , 曲线等 ,会显示在此区域 .按此图形即出现右图 ( 三 ) 的窗口 .此区为计算 , 评定区 . 如求 --距离 , 角度 , 平面度 , 圆柱度等 .图 ( 三 )图 ( 二 )并设定上下公差自动作是否合格的判断 .第 三 章 主 视 窗 介 绍 ( 一 )合格为绿色 , 不合格为红色 .CAD 窗口 :只显示选取的几何元素缩小顺时钟旋转 , 每次10度显示所有的几何元素 使用鼠标缩放逆时钟旋转 , 每次10度加载的CAD 文件窗口放大使用鼠标移动CAD图形 特征着颜色(按住鼠标左键然后移动)各种视图 选择旋转的轴向最适合CAD窗口大小 isometric ( 3D ) +X , -X 使用鼠标自由旋转 +Y , -Y (按住鼠标右键然后移动) +Z , -ZCAD 文件窗口的功能请参考第86页的介绍第 三 章 主 视 窗 介 绍 ( 一 )第四章回到机械坐标原点 ( Homing the CMM )一开机 , 进入Calypso , 机器便会自动往左上角移动 , 会移动是因为机器有内建的机械坐标 ,会移到左上角是因为机械坐标原点 ( 0 , 0 , 0 ) 在左上角 . 这个动作叫做 " Homing the CMM " .顺利完成此动作 , 在" 预先准备区 " 会出现绿灯则可继续量测动作 . 机器正常情况下, 皆可顺利完成 .若失败 , 则出现红灯则机器无法再动作 .此情况可能是CMM与Calypso联机失败 . 可在主要选单的 Extras \ workroom \ CMM 窗口中 ,按 " connect " 键重新连接 .Z Y( 0,0,0)XCMM* 若在平常的操作状态时 , 要使CMM回到机械坐标原点 , 可在操作盘上同时按住" Return " 和 " Shift " 不放 , 再按住 " F12 " , CMM就会回到机械坐标原点 .一开机 , 进入Calypso , 若在" 预先准备区 " 出现绿灯则表示CMM上已装有探头 , 且是已校正过的 , 可继续量测动作 .若出现红灯则要完成此项设定才可继续作量测 .[定义] :吸盘探头 ( Probe )探针 ( Stylus )每台CMM都会配 1 只标准探针 ( Master ) , 此探针有红点 . 如右图 .并在Calypso内有一个内建的探头档名叫 "Master Probe " .当使用标准探针时 , 其探头档名请用其内建的档名 "Master Probe " .其它的探针可用任意名称的探头档名 .每个探头可装 1 到 5 只探针 , 探针可给1,或2,3,4,5的数字名称 , 或文字的名称 . 建议按操作盘上的顺序给数字名称 .例如 :一个名为demo的探头有 5 只探针 , 配置如下图 .1 号探针 : 下方2 号探针 : 后方3 号探针 : 右方4 号探针 : 前方5 号探针 : 左方[RDS 探头的定义] : 有A 与 B 2种旋转角度RDS 的标准探针 ( Master )[安装探头] :一, 手动安装 :选主选单 Resources \ Manual Probes Changes 则出现图 (一) 的窗口 .取下探头 :用鼠标快速点2下此图则出现图 (二) 的窗口 ,按 "OK" , 5秒后探头便会掉下 ,要注意用手去接好 .安装探头 :图 ( 一 )先将探头直接放在吸盘下 ,会自动吸住 , 再用鼠标快速点2下此图 ,听到 " 喀 " 的声音后 ,会出现一个窗口 , 此窗口会显示所有已校正过的探头名称供选择 , 选择正确的名称 ,Calypso 便知道你安装了那只探头 .即完成安装 .图 ( 二 )若安装的是一只新的 , 未经校正过的探头 , 则选择 " New " 这个选项 , 会出现下面的窗口 ,输入这只新探头的名称输入第一只探针的名称按" OK " , 即完成安装 .二, 自动安装 : ( 选配 )选主选单 Resources \ Automatic Probe Change 则出现下图的窗口 .用鼠标直接点选要安装的探头位置 ,该探头位置会变成绿色 ,选择 " Load " , 按 OK后 ,即会自动更换 .例如 :现在CMM装的是原本放在A位置的MasterProbe 探头 . 要换装成在B位置的demo 探头 . 按上述的方法 , 按 OK后 .CMM即会自动先把MasterProbe 探头放回A位置 , 再去B位置取demo 探头安装 .一开始的设定 :若我们有1只 Master Probe 和3只量测用的Probe ( demo , 0.5mm , multi )先用" 手动更换探头 "的方式分别安装校正 demo , 0.5mm , multi 这3只探头 .然后把Master Probe放到 A ( 建议 ) , 其它3只分别放到 B, C , D 的位置 .再从此处选取 " Assign probe to …." ( 分配探头位置 ) 的指令 . 把Master Probe分配到此位置 .依此方法一一分配其它3个探头到 B, C, D 的位置 .其它指令 :Load : 把CMM .Set stylus system to stylus system holder :从新设定探针架上的探针组名字[探头校正] :一, 校正什么 ?1, 探头的直径 :量测时如右图 ,会有探头直径误差 ,实际尺寸 所以要校正探头 . 量测尺寸2, 探头的长度 , 位置 :二, 校正流程 :1. 先安装MasterProbe( 标准探针 ) 校正 " 参考球位置( Ref. Sphere Position ) " .2. 再安装其它的探头作校正 .三, 校正步骤 :1. 先在花岗岩台上安装好参考球 , 并在CMM 上装上MasterProbe( 标准探针 ) .2. 在" 预先准备区 " 按即会出现右图 ( 一 ) 的窗口 .此时 Probe name 应选择为MasterProbe .x,y,z 值则自动显示为0 . 表示以此标准探针的球中心为参考原点 . 再作其他探针的校正时 ,此处就会显示该校正探针的相对位置 , CMM 第 五 章 安装和校正探头( Installing and Qualifying Probes )工件图 ( 一 )第五章安装和校正探头( Installing and Qualifying Probes )例如 : demo探头的 1 号探针的x,y,z为 (0,0,-20 ) .这表示(0,0,0)20MasterProbe的1号探针( 标准探针)(0,0,-20 )demo探头的 1 号探针3. 检查 Qualify mode :扫描式测头选 " Tensor " , 其它选 " Six point " .4. 按 " 参考球位置( Ref. Sphere Position ) " .会出现右下方的窗口 .依参考求摆放的位置 ( 俯视图 )直接用鼠标去点选正确的图形此处的角度便会自动修正然后按 " OK " .5. 将探头移到参考球正上方 , 以探针的轴向对准参考球面中心 ,如下图 ( 二 )~( 四 ) .( 1 号探针的方向 )图 ( 二 )( 3 号探针的方向 )( 5 号探针的方向 )图 ( 三 )图 ( 四 )直接操作探针去碰参考球 . 探针便会自动作校正 , 完成参考球位置的校正了 .6. 再换上其他要校正的探头( 如demo探头 ) 作校正 .7. 再按" Stylus Qualification " 钮 , 来校正此探头 .依步骤 5 , 完成校正 .校正后此处会显示出探针的半径值 ,及标准偏差等资料 .8. 此时demo探头上就已经完成第一只探针的校正了 .若demo探头上还有第二只探针要校正 .先按此按钮增加第二只探针 ,出现右边的窗口 , 输入第二只探针的名称 ,按 " OK " .再依步骤 7 和 5 , 完成校正 .依此方法完成所有探针的校正 .建立新探头1.给新探针输入新的名字2.给新探针第一支探,输入新的名字自动更正探头管理标准球管理RDS 探头角度旋转( 删除 , 编辑探头数据 )手动更换探头建立新探头探针改名称自动更换探头建立新探针Tensor : 扫描式探头用的自动更正校正方式Six Points : 自动更正Manual : 手动校正探头名称探针名称校正探针定义参考球位置校正的探针名称参考球信息和日期半径标准偏差Sphere coverage : 校正时 , 参考球的覆盖范围 .第 五 章 安装和校正探头( Installing and Qualifying Probes )第 六 章 设定工件坐标系统 ( Defining the Base Alignment ) CMM刚开机时 , 坐标系统是机械坐标 . 而要量工件时 , 就要建立工件自己的坐标系统,而且此建立的工件坐标系统也同时存成一个档名 ( 与此程序的文件名一样 ) . 下次要量相同的工件 , 若工件摆放的位置与上次一模一样,则可直接叫出此工件坐标系统的文件名,不用重做工件坐标系统 .一, 建立新工件坐标系统 :( 以图 ( 一 ) 的工件为例子 )1. 在" 预先准备区 " 按即出现图 ( 二 ) 的窗口 .2. 按 OK 键 .即出现图 ( 三 ) 的窗口 .图 ( 一 )图 ( 二 )3. 用 " 3-2-1法则 " 取点 .即点3点成一平面 , 点2点成一直线 , 点1点成一点 .即可构成一立体坐标系统图 .看下页图 ( 三 )第 六 章 设定工件坐标系统 ( Defining the Base Alignment )直接在工件表面点3点 , 如图( 一 ) 后 , 会出现图 ( 二 ) ,按 OK 键 .图( 一 )图 ( 二 )接着在工件侧面点2点 , 如图( 三 ) 后 , 会出现图 ( 四 ) ,按 OK 键 .图( 三 )图 ( 四 )接着在工件右侧面点1点 , 如图( 五 ) 后 , 会出现图 ( 六 ) ,按 OK 键 .4. 出现图( 一 )窗口 , 按OK 键后 , 即完成 , "预先准备区 "图 ( 二 ) 也变成绿色 .图( 一 ) 图 ( 二 )二, 加载旧工件坐标系统 :在" 预先准备区 " 按即出现图( 三 ) 的窗口 .选载入档名 ,按OK 键后即可 .图( 三 )三, 编辑工件坐标系统 :1. 在" 预先准备区 " 按即出现图 ( 四 ) 的窗口 .选按OK 键 .第 六 章 设定工件坐标系统 ( Defining the Base Alignment )图 ( 四 )第 六 章 设定工件坐标系统 ( Defining the Base Alignment ) 2. 出现右图( 一 )窗口 .例如若要修改原点 X 的坐标 ,则直接用鼠标点选3. 会出现图 ( 二 ) 的窗口 .图( 一 )此区会列出既有的几何组件 , 直接用鼠标点选要选用的几何组件即可 .若所要重新定义的原点 X 的坐标是新的几何组件 ,则选 " NEW " , 直接去量该组件 .图 ( 二 )4. 完成后会显示出新的坐标系统 .四, " Execute During Run As " 图( 三 ) 的意义 :Manual Run : 作CNC量测时 , 坐标系统设定的步骤 , 都要再用手动量一便 .Automatic Measurement : 作CNC量测时 , 坐标系统设定的步骤 , 都会自动执行.Set Base Alignment to zero : 将工件坐标系统变成机械坐标系统 .Execute Manual Run Now : 工件摆放位置不同了 ,可在跑程序前 , 先进入到此窗口 , 按此功能 ,可立刻用手动量测建立实时的坐标系统 ,再跑程序 , 此实时的坐标系统只是 " 实时的 ' ,不会覆盖之前的坐标系统文件 .五, 坐标系统设定的练习 :范例一,如何作此图的坐标系统 ?1取一平面2取一圆 , 设其为 (0,0,Z)3取一圆XY Z范例二,如何作此图的坐标系统 ?原点在圆柱与平面交界处* 此范例的"安全平面的建立" ,较特别 , 请看第七章的范例 ( 20页) .1取一平面2量一直线 , 设其为X轴3取一圆 , 设其为 (0,0,Z)XYZ范例三,假设此工件只有黄色的那面有几何组件,可供作坐标系统 .如何作此图的坐标系统 ?假设此三面为曲面* 此范例的"安全平面的建立" ,要特别注意 , 请看第七章的范例 ( 31页 ) .1取一平面Y-Origin 设为Plane2量一直线 , 设其为X轴3取一圆 , 设其为 (0,Y,0)YZ X設為-Y第 六 章 工件坐标系统窗口坐标系统的名称 ( 与程序名称相同 )Spatial Rotation设定空间轴向Planar Rotation设定平面轴向X-Origin原点 XY-Origin原点 YZ-Origin原点 ZManual Run : 作CNC量测时 , 坐标系统设定的步骤 , 都要再用手动量一便 .Automatic Measurement : 作CNC量测时 , 坐标系统设定的步骤 , 都会自动执行.Set Base Alignment to zero : 将工件坐标系统变成机械坐标系统 .Execute Manual Run Now : 工件摆放位置不同了 ,可在跑程序前 , 先进入到此窗口 , 按此功能 ,可立刻用手动量测建立实时的坐标系统 ,再跑程序 , 此实时的坐标系统只是 " 实时的 ' ,不会覆盖之前的坐标系统文件 .可对坐标系统作移动 ( Offset ) , 旋转 ( Rotate by an angle , Rotate by distances ) .在坐标系统窗口上 , 按 " Special " .出现下面窗口 ,按 " Offset "直接输入要移动的距离 , 原点就会移动到新位置 .按选择旋转轴坐标系统就会旋转到新位置 .按选择旋转轴输入坐标值坐标系统就会旋转到新位置 .若把" Keep CAD Origin " 打勾 , 则 Offset , Rotate by an angle , Rotate by distances 所作的改变就会取消 ,回复到原先的坐标系统 . 取消勾选 , 则 Offset , Rotate by an angle , Rotate by distances 又会发生作用 .如何删除工件坐标系统 ( base alignment ) :从主选单 File \ Delete Base Alignment , 即可选择要删除那些已经建立的坐标系统 .一, 为何要设定安全平面 ?在作量测时 , 我们人知道工件在那里 , 有多大 . 但执行 CNC量测时 , 机器并不知道 , 会造成撞机 .例如 :( OK )( 撞机 )若设定安全平面 :( OK )二, 如何设定安全平面 : ( 以图 ( 一 ) 为例 )1. 在" 预先准备区 " 按即出现图 ( 二 ) 的窗口 .图 ( 一 )图 ( 二 )工件工件工件工件2. 将探头移到工件的右上角 , 在操作盘的游戏杆上按3下 ( 代表输入X,Y,Z的坐标 ) .3. 再将探头移到工件的左下角 , 在操作盘的游戏杆上按3下 ( 代表输入X,Y,Z的坐标 ) .4. 按 OK 键即可 .三, 安全平面设定的练习 :范例一,完成右图的坐标系统及安全平面的设定后 ( 参考16页) .在此区域会出现3个几何组件 .执行 CNC 量测时 , 执行 到Plane 时 , 仍会撞机 ?因为安全平面是介于几何组件与几何组件间的 .此范例的Plane1的量测路径如下 , 所以会撞机 .不会移到安全平面外 , 所以撞机 .( 改善方法一 )1. 选Plane1 , 开启 Plane1量測Plane1探頭移到安全平面外量測2D Line 1量測Circle1探頭移到安全平面外2. 出现( 图一 ) 窗口 , 按strategy 后 , 出现 ( 图二 ) 窗口 .( 图二 ) ( 图一 )3.选Clearance Data 并打开 , 出现( 图三 ) 窗口 .Retract Distance 为碰到工件后离开的距离 . 所以加大此值 ,会变成就不会撞机了 .( 图三 )( 改善方法二 )将CMM的探头移到空间中的任一点后 , 按后会出现选CMM Position 按鼠标中键 , 会出现copy ,cut 等功能 ,可将CMM Position剪贴至其它Probing Point 中会变成 ( CMM Position )就不会撞机了 .Probing PointProbing PointCMM PositionProbing Point范例二,完成右图的坐标系统及安全平面的设定后 ( 参考25页) .在此区域会出现3个几何组件 .执行 CNC 量测时 , 执行 到Circle 时 , 仍会撞机 ?因为要注意Circle 1 的 Clearance Data 中Clearance Plane 要设成CP-Y .如此探头量完 Circle 后 , 才会往正确的方向 , 退到安全平面外 .就不会撞机了 .ZYX-YSCP安全全平面组CP (准备区设定的安全平面高度)SCP安全全平面组 :是另一组回退距离的设定,它让探针不用每次都回退安全平面之外SCP安全全平面组的距离设定第 九 章 几何元素Point点Circle圆Plane平面2-D Line线( 所有用探头量的线都是 2D 线 )3-D Line3D 线( 所有用 recall 功能形成的线都是3D 线 )Cylinder圆柱Cone圆锥Sphere球Curve曲线( 选配软件 )3d-Curve曲面( 选配软件 )Additional Features其他几何元素Ellipse椭圆Slot长圆Rectangle矩形Offset Plane平面偏移Symmetry Point对称点Radius Point半径点(点到原点的2D距离,量圆柱用) Sphere Point球点(点到原点的3D距离,量球用) Angle Point角度点(点与基准面的角度,量2个平面的角度用)Circle on Cone圆在圆锥(与圆的定义相同)General on Cone( 选配软件 )General Curve( 选配软件 )Free Form Surface( 选配软件 )Holos( 选配软件 )Gear( 选配软件 )Turbime Blade( 选配软件 )一 , 方法一 :1. 在主选单 " Feature " 选择想要量测的元素 .2 . 然候打开该元素的Feature窗口 , 再直接量测即可 .二 , 方法二 :直接量测工件 , Calypso会自动判断出你是要量何种几何元素 .若判断错误 , 可在此处选择正确的几何元素 ,量测到的数据就会自动更正 .* 量测时 , 若取点错误 , 可按操作盘上的" F3 " 取消上一个点的量测 .量测的建议 :1. 量测点数是数学点数" 至少 " 再加 1 . 例如3点在数学上可成一圆 , 量测圆时要加 1 ,也就是至少要量4点 . 以此类推 ,线 : 2 +1 = 3 以上圆 : 3+1 = 4 以上平面 : 3+1 = 4 以上若量一长圆 , 长圆是由2的圆弧和2条直线组成 .所以最好要量14点 .2. 量圆时 , 尽量4个方向都取点 , 取点时 , Z 轴不可移动 .3. 量平面时 , 取点范围尽量涵盖整个平面 , 不要只在平面上的一小范围取点 .4. 量斜面时 , 尽量同一方向取点 .或5. 量圆柱和圆锥 , 至少要量3个圆 , 上下圆的点数尽量在相同的位置方向 .各种特征的最少量测点数 :ELLIPSE 椭圆在一个平面截面上至少探测5 点。