T T
T
f (t ) dt
f (t ) dt
2
2
(1.1-1)
1 P lim T 2T
T
T
( 1.1-2 )
上两式中,被积函数都是f ( t )的绝对值平方,所以信号能量 E 和信号功率P 都是非负实数。 若信号f ( t )的能量0 < E < , 此时P = 0,则称此信号 为能量有限信号,简称能量信号(energy signal)。 若信号f ( t )的功率0 < P < , 此时E = ,则称此信 号为功率有限信号,简称功率信号(power signal)。 信号f ( t )可以是一个既非功率信号,又非能量信号, 如单位斜坡信号就是一个例子。但一个信号不可能同时既是 功率信号,又是能量信号。
1.3 系统的数学模型及其分类
1.3.1 系统的概念 什么是系统( system )?广义地说,系统是由若干相互作用 和相互依赖的事物组合而成的具有特定功能的整体。例如, 通信系统、自动控制系统、计算机网络系统、电力系统、水 利灌溉系统等。通常将施加于系统的作用称为系统的输入激 励;而将要求系统完成的功能称为系统的输出响应。 1.3.2 系统的数学模型 分析一个实际系统,首先要对实际系统建立数学模型,在数 学模型的基础上,再根据系统的初始状态和输入激励,运用 数学方法求其解答,最后又回到实际系统,对结果作出物理 解释,并赋予物理意义。所谓系统的模型是指系统物理特性 的抽象,以数学表达式或具有理想特性的符号图形来表征系 统特性。
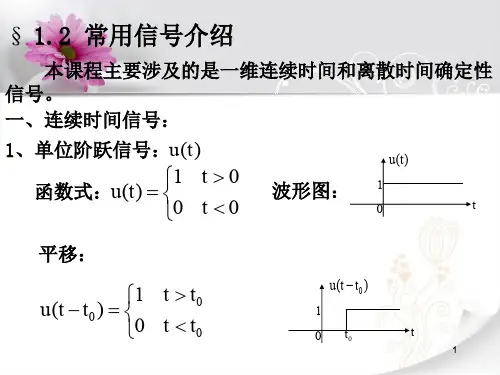
2.连续信号和离散信号 按照函数时间取值的连续性划分,确定信号可分为连续时 间信号和离散时间信号,简称连续信号和离散信号。 连续信号( continuous signal)是指在所讨论的时间内,对 任意时刻值除若干个不连续点外都有定义的信号,通常用f ( t ) 表示。 离散信号(discrete signal)是指只在某些不连续规定的时刻 有定义,而在其它时刻没有定义的信号。通常用 f(tk) 或 f(kT) [简写 f(k )] 表示,如图1.1-2所示。图中信号 f (tk) 只在t k = -2, -1, 0, 1, 2, 3,…等离散时刻才给出函数值。

![信号与系统_精解课件§1[1].5_奇异函数](https://uimg.taocdn.com/9edd53a4b0717fd5360cdc2c.webp)