发动机神经网络自适应PID转速控制
- 格式:pdf
- 大小:633.05 KB
- 文档页数:4
基于BP 神经网络的自适应PID 控制器设计一.基于BP 神经网络的自适应PID 控制器的原理PID 控制是最早发展起来的、 应用领域至今仍然广泛的控制策略之一,它是基于对象数学模型的方法,尤其适用于可建立精确数学模型的确定性控制系统。
其优点是算法简单、 鲁棒性好和可靠性高。
但是,由于实际工业生产过程往往具有非线性,许多非线性系统难以确定精确的数学模型,常规的PID 控制器就不能达到理想的控制效果,由于受到参数整定方法烦杂的困扰,参数往往整定不良、 性能欠佳。
神经网络所具有的任意非线性表达能力,可以通过对系统性能的学习来实现具有最佳组合的PID 控制。
基于BP 网络的自适应PID 控制器,通过BP 神经网络调整自身权系数,对PID 控制参数进行调节,以达到某种性能指标的最优。
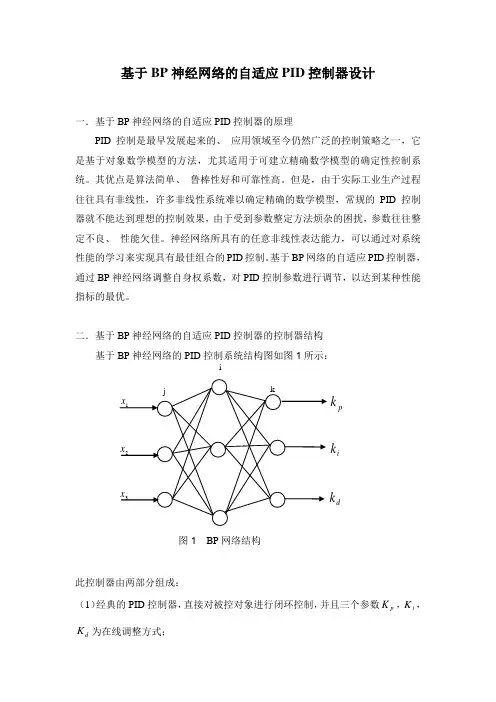
二.基于BP 神经网络的自适应PID 控制器的控制器结构基于BP 神经网络的PID 控制系统结构图如图1所示:此控制器由两部分组成:(1)经典的PID 控制器,直接对被控对象进行闭环控制,并且三个参数p K ,i K ,d K 为在线调整方式;图1 BP 网络结构p ki kd ki(2)神经网路,根据系统的运行状态,调节PID 控制器的参数,以期达到某种性能指标的最优化,是输出层神经元的输出状态对应于PID 控制器的一个可调参数p K ,i K ,d K 。
通过神经网络的自学习、加权系数调整,使神经网络输出对应于某种最优控制率下的PID 控制器参数。
基于BP 神经网络的自适应PID 控制器的控制器如图2所示:该控制器的算法如下:(1)确定BP 神经网络的结构,即确定输入节点数M 和隐含层节点数Q ,并给各层加权系数的初值)0(1ij w 和)0(2ij w ,选定学习速率η和惯性系数α,此时k=1; (2)采样得到rin(k)和yout(k),计算该时刻误差error(k)=rin(k)-yout(k);(3)计算神经网络NN 各层神经元的输入、输出,NN 输出层的输出即为PID 控制器的三个可调参数p K ,i K ,d K ;(4)根据经典增量数字PID 的控制算法(见下式)计算PID 控制器的输出u(k); ))2()1(2)(()())1()(()1()(-+--++--+-=k error k error k error K k error K k error k error K k u k u d i p (5)进行神经网络学习,在线调整加权系数)(1k w ij 和)(2k w ij 实现PID 控制参数的自适应调整;(6)置k=k+1,返回到(1)。
文档从互联网中收集,已重新修正排版,word格式支持编辑,如有帮助欢迎下载支持。
目录一、设计题目······································································································错误!未定义书签。
二、系统的工作原理 ··························································································错误!未定义书签。
自适应调速系统中的PID控制算法研究近年来,随着科技的不断发展,各种电机设备的应用也越来越广泛,电机的控制系统也得到了很大的提升。
在各种电机设备的控制系统中,PID控制算法是一种应用较为广泛的算法。
而在自适应调速系统中,PID控制算法也占据着非常重要的地位。
本文将从自适应调速系统的特点、PID控制算法的原理和应用、以及PID控制算法在自适应调速系统中的研究方面进行论述。
一、自适应调速系统的特点自适应调速系统是一种非常特殊的电机控制系统,它具有以下几个特点:1.系统的动态性能要求高一般来说,自适应调速系统中的电机设备应用较为广泛,因此系统的动态性能要求非常高。
对于电机设备的控制与调速,系统需要快速、准确地响应,并能够带来稳定的运行效果。
2.系统具有较好的鲁棒性在自适应调速系统中,电机设备的应用场景因工作环境,受电源质量等多种因素的影响可能发生不确定的变化,而这些变化可能对系统带来很大的影响。
因此,自适应调速系统需要具备较好的鲁棒性,能够在各种环境条件下运行并稳定工作。
3.系统需要进行参数自适应、智能化控制自适应调速系统中的电机设备在运行的过程中,经常会面临着电流、电压、转速等参数的变化,在不同的工况下需要进行多种参数的自适应控制。
因此,自适应调速系统需要具备智能化控制,能够自动调节各种参数,实现最佳的运行效果。
二、PID控制算法的原理和应用PID控制算法是一种比较经典的控制算法,PID分别代表比例、积分、微分三个单词。
PID控制算法能够将控制系统的误差与控制输出之间的比例、积分和微分相结合,从而实现对系统的稳定控制。
更为具体的讲,PID控制器可以分为比例、积分、微分三部分:1. 比例部分比例部分是最简单、最容易实现的控制部分,它的主要作用是根据误差得出控制器的输出。
比例部分的输出与误差成比例,即输出值等于误差乘以系数Kp,其中Kp为比例系数。
2. 积分部分积分部分可以消除误差的稳定偏差,将慢速的反馈信号加入到控制器的输出中,从而实现控制系统当前误差和历史误差的累计。
自适应pid控制方法
自适应PID控制方法是一种基于PID控制器的改进控制方法。
它通过对系统参数进行实时监测和调整,自动调整PID控制器的参数,以适应系统参数变化和不确定性的影响。
这种控制方法能够有效提升系统的稳定性和响应速度,降低控制误差和能耗。
自适应PID控制方法主要分为两种类型:基于模型参考自适应PID控制和基于模型自适应PID控制。
前者通过建立系统模型,将模型输出与实际输出进行比较,从而调整PID参数;后者则是利用经验模型或数据模型,直接从实际输出中提取参数并进行调整。
这两种方法各有优缺点,选择合适的方法需要根据具体应用场景来决定。
自适应PID控制方法在工业自动化、机器人控制、航空航天等领域得到了广泛应用。
未来,随着智能化和自动化技术的不断发展,自适应PID控制方法将会有更广泛的应用和更深入的研究。
- 1 -。
基于神经网络的自适应PID控制策略研究近年来,神经网络技术逐渐成为控制领域中的热点研究方向之一。
在控制领域中,PID控制器是最常用的一种控制器,但是,在复杂的非线性系统中,PID控制器可能会失效,因此需要一种更为智能化的自适应控制策略。
本文将着重研究基于神经网络的自适应PID控制策略的原理和应用。
一、神经网络控制简介神经网络控制是一种使用神经网络技术实现控制的控制方法。
神经网络具有自学习和自适应能力,能够适应未知的非线性因素,因此能够有效地提高控制精度。
在神经网络控制中,通常使用BP神经网络进行训练,将网络的输入与输出之间的关系建模,进而得到控制器。
二、PID控制器PID控制器是最常用的一种控制器,它由比例项、积分项和微分项组成。
其中,比例项控制系统的静态误差,积分项控制系统的稳态误差,微分项控制系统的动态响应。
经过调整PID参数,可以实现对系统的稳态和动态性能的优化。
三、传统PID控制器的缺点通过传统PID控制器的参数调整,可以得到较好的控制效果。
但是,在非线性系统控制中,PID控制器的参数调整会变得更加困难,可能会导致系统不稳定或控制精度不高。
这是因为传统PID控制器中的参数是固定的,无法根据系统的变化进行自适应调整。
因此,需要一种更为灵活、智能的自适应控制方式。
四、基于神经网络的自适应PID控制策略与传统PID控制器不同,基于神经网络的自适应PID控制器能够在实时控制过程中不断调整控制器参数,以应对不同的情况。
它能够根据系统的输入和输出实时调整控制器的权值,从而实现对非线性系统的自适应控制。
基于神经网络的自适应PID控制策略的实现方法,一般是将系统的输入和输出作为训练数据,通过训练得到神经网络的权值。
在控制器实时控制过程中,根据系统输出实时调整神经网络的权值,从而实现自适应控制。
五、应用实例基于神经网络的自适应PID控制策略在实际应用中,可以针对不同的场景进行多样化应用。
下面以一个灯光控制系统为例来进行说明。
基于神经网络的电机转速控制方案设计电机转速是控制电机工作的重要参数之一,合理的转速控制方案设计不仅可以保证电机的正常工作,还可以提高电机的效率和使用寿命。
基于神经网络的电机转速控制方案设计是目前研究的热点之一,本文将详细介绍基于神经网络的电机转速控制方案设计方法及其优势。
一、引言电机是一种将电能转化为机械能的装置,广泛应用于各个领域。
在许多应用中,电机的转速需要根据实际需求进行控制,如机械设备的调速、航空器和船舶的控制等。
传统的电机转速控制方法存在调节范围窄、响应速度慢、稳定性不高等问题,因此,基于神经网络的电机转速控制方案成为了一种新的解决方法。
二、基于神经网络的电机转速控制方案设计1. 神经网络的基本原理神经网络是一种模拟生物神经网络的人工智能方法,它通过模拟大脑神经元之间的连接和相互作用来实现学习和自适应能力。
神经网络由输入层、隐藏层和输出层组成,通过训练样本的学习,可以得到网络的权重和偏置,从而实现对输入数据的良好拟合。
2. 电机转速控制方案设计步骤(1)数据采集:收集电机转速与输入变量的数据,如电压、电流、负载等。
需要足够多样的数据以保证训练的准确性和泛化能力。
(2)数据预处理:对采集的数据进行标准化处理,如归一化、去除异常值等,以提高神经网络的训练效果。
(3)网络结构设计:确定神经网络的层数和节点数,可以根据实际需求和数据情况进行调整和优化。
(4)样本划分:将采集的数据集划分为训练集、验证集和测试集,用于神经网络的训练、验证和评估。
(5)网络训练:使用训练集对神经网络进行训练,通过反向传播算法不断调整网络的权重和偏置,以提高网络的性能。
(6)网络验证与调优:使用验证集对已训练好的网络进行验证,并根据验证结果对网络进行调优,如调整学习率、增加正则化等。
(7)网络测试与应用:使用测试集对训练好的网络进行测试,并评估转速控制方案的性能和准确性。
(8)方案优化:根据测试结果对转速控制方案进行优化和改进,以进一步提高控制效果和稳定性。
基于BP神经网络的自适应PID控制器设计自适应PID控制器是一种基于BP神经网络的控制器设计方法,它结合了传统的PID控制器与神经网络的优势,可以适应系统参数变化、非线性和模型误差的情况。
本文将详细介绍基于BP神经网络的自适应PID控制器的设计原理和实现步骤。
1.简介PID控制器是一种经典的控制方法,通过计算误差的比例、积分和微分部分,调节输出控制量来实现对系统的控制。
然而,传统的PID控制器无法处理非线性和参数变化的系统,容易产生较大的误差。
而BP神经网络则具有非线性映射和自适应学习的能力,可以对非线性系统进行建模和控制。
2.BP神经网络的建模BP神经网络是一种前馈神经网络,具有输入层、隐含层和输出层。
输入层接收系统的输入量,输出层输出控制量,隐含层则通过一系列的神经元进行信息传递和处理。
BP神经网络通过训练集的样本进行学习,调整网络的权值和偏置,使得网络的输出与期望输出尽可能一致。
3.PID控制器的设计PID控制器由比例、积分和微分三个部分组成。
比例部分通过调节误差的大小来控制输出,积分部分可以控制持续的误差,微分部分则可以控制误差的变化率,提高系统的响应速度。
PID控制器的参数可以根据系统的特性进行调整。
4.自适应PID控制器的设计a.构建BP神经网络模型,通过训练集对模型进行学习,得到网络的权值和偏置。
b.使用PID控制器的比例、积分和微分部分计算出控制量,并将控制量作为输入量输入到BP神经网络中。
c.根据神经网络的输出,计算系统的输出,将其与期望输出进行比较,得到误差。
d.根据误差的大小,调整PID控制器的参数。
e.重复步骤b-d,直到系统达到期望输出。
5.应用实例自适应PID控制器可以应用于各种系统的控制中,如温度控制、位置控制等。
以温度控制为例,系统输入为温度传感器的读数,输出为控制器输出的控制量。
通过采集训练集数据和期望温度值,利用BP神经网络对系统进行建模和学习,然后根据PID控制器的参数计算出控制量,进而控制温度的变化。

基于深度神经网络的自适应PID控制自适应 PID 控制是现代控制理论中的一种重要方法,它通过不断地对实际控制系统的反馈信息进行分析,来实现对系统参数的自适应优化,从而达到更优的控制效果。
在传统的控制方法中,PID 控制器是最常见的一种控制器,它通过改变比例、积分、微分三个参数来控制系统的输出行为。
虽然 PID 控制的思想简单而直观,但它往往需要通过人工调整控制器参数才能达到最佳的控制效果,这使得传统的PID 控制方法在复杂的工业控制系统中应用受到了很大的限制。
近年来,随着深度学习技术的快速发展,越来越多的控制问题开始通过深度神经网络来解决。
深度神经网络通过多层的非线性映射来实现复杂的数据处理和表达,具有非常强的模型适应力和自适应能力,并且能够从大量的数据中学习到系统的隐含规律,从而提高控制性能。
基于深度神经网络的自适应 PID 控制是一个典型的应用场景。
它通过将深度神经网络嵌入到PID 控制器中,实现对系统参数的自适应学习,从而优化控制效果。
具体实现上,基于深度神经网络的自适应PID 控制可以分为以下两个步骤:首先,通过采集真实系统的数据,训练一个深度神经网络,用来对系统的动态特性进行建模和预测。
其次,在 PID 控制器中将这个深度神经网络作为预估器,根据预测误差来自适应调整 PID 控制器的参数,从而达到更优的控制效果。
在实际应用中,基于深度神经网络的自适应 PID 控制已经得到了广泛的应用。
例如在工业自动化领域,它可以通过对温度、压力等参数的自适应调整来实现对化工过程的控制;在机器人控制中,它可以实现对机械臂的精确控制和路径规划;在无人驾驶汽车中,它可以通过对车速、转向等参数的自适应调整来实现对车辆的自动驾驶。
总之,基于深度神经网络的自适应 PID 控制是现代控制理论中的一种重要方法,它能够实现对复杂工业系统的自适应优化。
随着深度学习技术的发展,我们相信基于深度神经网络的自适应 PID 控制将会在更多的领域得到应用,并取得更加突出的成果。
HUNAN UNIVERSITY2016 年6 月 25 日课程 智能控制理论题目 基于神经网络的自适应PID控制器的设计学生姓名 学生学号 专业班级 学院名称基于神经网络的自适应PID控制器的设计摘要神经网络由于其固有的自学习、自适应、自组织和大规模并行处理能力,已经在控制及其优化领域取得了广泛的应用。
利用神经网络来可以处理控制系统的非线性、不确定性和逼近系统的辨识函数等问题并取得了大量研究成果。
PID控制是最经典的控制算法,其简单、稳定、高效的性能使其在工业控制领域具有绝对的统治地位。
但是面对现代控制系统规模大,复杂度高的情况,单纯使用传统的PID控制已经无法满足要求。
本文结合神经网络与PID两者的优势,提出了一种基于神经网络的自适应PID控制器的设计的方法。
实验证明该方法具有一定的实际应用价值。
近年来,智能控制在工业领域的应用受到了广泛的关注,硬件性能的不断提高与硬件成本的不断降低起到了至关重要的作用。
目前在工业中单纯使用传统的控制方法具有一定的局限性,在面对复杂系统与大规模控制的情况下不能保证在任何时刻都提供准确无误的控制信号,将传统的PID控制方法结合智能控制中的神经网络控制可以克服信息的不完备性和不确定性,更加准确地控制被控对象,从而做出正确的判断和决策。
1.神经网络控制神经网络用于控制系统设计主要是针对系统的非线性、不确定性和复杂性进行的。
资料显示,国内外将神经网络用于控制系统设计的方式和结构还未有一种统一的分类方法。
目前,对神经网络控制系统比较公认地研究方向可以分为监督控制、神经自适应控制、预测控制和逆控制,这时根据控制系统的结构划分的。
本文利用到的就是神经自适应控制。
本文结合神经网络自适应控制与PID控制,提出了一种有效的控制器设计方法,并在在MA TLAB中进行控制系统仿真。
2.控制器原理根据当前产生误差的输入和输出数据,以及误差的变化趋势作为神经网络的输入条件,神经网络将根据当前PID控制器的误差情况以及过去所有进行的PID控制历史数据,共同作为样本数据,重新进行神经网络的参数的训练,得到神经网络内部传递函数的新的表达式,之后PID参数调整将依据新的神经网络进行自动的控制和调整,从而以实现PID控制器具备自适应调节的能力。
神经网络PID控制系统的研究神经网络PID控制系统是一种将神经网络与PID控制策略相结合的控制方法。
这种控制系统在处理具有非线性、不确定性和时变性等特性的系统时具有显著的优势。
随着人工智能和自动化技术的不断发展,神经网络PID控制在工业过程控制、航空航天、机器人等领域的应用越来越广泛。
本文将介绍神经网络PID控制系统的研究背景、意义和现状,分析相关文献,并探讨未来的研究方向。
神经网络PID控制系统的研究始于20世纪90年代。
自那时以来,许多学者致力于研究神经网络PID控制系统的理论和实践。
其中,最具代表性的工作是利用神经网络对PID控制器的参数进行自适应调整。
例如,王占林等(2005)提出了一种基于神经网络的PID参数自适应控制器,用于解决传统PID控制器难以适应被控对象变化的问题。
该方法通过神经网络学习和调整PID控制器的参数,以提高控制系统的性能。
然而,他们的方法未能在复杂的实际应用场景中进行验证。
在另一方面,一些研究者于利用神经网络对PID控制器进行改进。
例如,赵春娜等(2007)提出了一种基于RBF神经网络的PID控制器,以解决传统PID控制器在处理非线性系统时的不足。
RBF神经网络具有较好的逼近能力和较低的计算复杂度,可以用于非线性系统的建模和控制。
然而,他们的方法需要选择适当的RBF神经网络结构和参数,这在实际应用中可能具有一定的挑战性。
本文提出了一种基于深度学习的神经网络PID控制系统。
我们通过数据采集和预处理,建立了被控系统的模型。
我们使用加速度传感器和角度传感器对机器人手臂进行了数据采集,包括位置、速度和加速度等参数。
然后,我们利用这些数据训练了一个深度神经网络模型,以实现对机器人手臂的高效控制。
在神经网络模型建立后,我们通过调整PID控制器的参数,实现了对传统PID控制器的优化。
具体地,我们利用神经网络的自适应学习能力,动态地调整PID控制器的Kp、Ki和Kd等参数。
这样,PID控制器可以根据实时数据自动调整其参数,以适应不同的运行条件和环境。
目录一、设计题目 (1)二、系统的工作原理 (2)三、BP神经网络 (3)3.1BP神经网络结构 (3)3.2BP网络学习算法 (4)四、基于BP神经网络的PID控制器 (6)4.1PID控制器 (6)4.2基于BP神经网络的PID控制器 (7)五、程序代码及结果分析 (10)5.1程序代码 (10)5.2仿真结果 (13)六、结论 (15)一、设计题目柴油-电力机车传动电机的转速控制柴油机有着十分广泛的用途,它可用来驱动内燃机车的传动电机,从而保证重型列车的正常运行。
但是柴油机的工作效率对转速非常敏感,因此为了提高其工作效率,应该控制传动电机的转速。
图中给出了柴油内燃机车的电力传动模型。
图1-1 转速控制模型移动输入电位计的游标,可设置控制阀的位置,从而设定传动电机的预期转速w r 。
负载转速w 0是受控变量,其实际值由测速机测量。
测速机由电机轴上的皮带驱动,其输出电压v 0是系统的反馈变量。
由于输入电位计提供了预期参考电压,由此可求得参考电压与反馈电压间的偏差为( v r - v 0 )。
放大器将偏差电压放大后,生成电压信号v f ,并用作直流发电机的线圈磁场电压。
在电力传动系统中,柴油机的输出转速恒为w q ,直流发电机由柴油机驱动,其输出电压V g 是电枢控制直流电机的驱动电压。
此外电枢控制直流电机的励磁磁场电流i 也保持恒定不变。
在上述条件下,由于V R 的作用,直流电机将产生力矩T ,并使负载转速w 0逐渐趋近于预期转速w r 。
已知:● 电机的反电动势系数为Kb =31/50;● 与电机有关的参数为J=1,b=1,La=0.2,Ra=1; ● 发电机有关的参数为励磁电阻Rf=1,励磁电感Lf=0.1,Lg=0.1,Rg=1;柴油机 w rv rv 0v d 常量放大器i f L f R fi a L a R a发电机电机测速机负载w 0,J ,bv fV g● 测速机增益Kt=1;●发电机常数Kg ,电机常数Km 自定;二、系统的工作原理本系统利用移动输入电位计的游标,可设置控制阀的位置,从而设定传动电机的预期转速w r ,在移动输入电位计两端加有电源,每当游标移动一定距离,电位计上输出电压也跟随变化,该变化的电压(由输入电位计提供的的预期参考电压)与电动机反馈回来的电压值v 0进行比较,得到一个电压差v r - v 0。
基于神经网络自适应PID的发动机转速控制对策分析【摘要】为确保发动机转速控制准确率得以有效提升,对系统中非线性及复杂问题进行良好控制,笔者从发动机模型的构建、转速神经控制结构及神经网络形式三方面进行阐释,在PID控制和神经网络有效结合的基础上,实现了对发动机转速有效控制的目标。
【关键词】发动机;神经网络;自适应PID;转速控制对策发动机作是一个典型的非线性系统,并且具有明显的时滞、时变特征,这些复杂问题都为对其有效控制提出了难题,因此,将智能控制融入其中是解决这些问题的必然选择。
在这个过程中,转速控制一直是研究的关键,尤其是针对发动机的怠速控制,作为评价发动机的一项十分重要的性能指标,更是得到愈来愈多的重视。
对于发电用发动机,转速控制尤为重要,转速控制的稳定性对发电机组的供电稳定将产生直接影响。
但是,由于发动机的性能受诸多参数的影响,比如通常会忽略的进气歧管截面积温度的高低变化、发动机部件出现磨损问题等等,导致发动机模型构建并不精确,而且相对可靠性也较差。
为此,笔者在发动机转速神经网络控制的基础上,对其结构和形式予以阐释,同时将神经网络和自适应PID控制两者有效结合,基本实现了对发动机转速的良好控制,确保了发动机的最优工作状态。
一、发动机控制现状及问题要有效提高发动机性能,其控制系统的性能提升和调整是重中之重,因此,在开发发动机控制系统性能时,要综合考虑,以提高系统稳定性为前提,以实现其使用、维护、调整更为灵活和便捷为目的,鉴于此,采用基于模型的PID控制对发动机转速进行智能控制是目前研究的重点。
但一般的发动机数学模型都很难精确,此种情况下为确保系统的性能稳定,就必须寻求一种拥有自适应能力的控制算法。
随着科技的快速发展,神经网络自适应控制逐渐为大家认识并愈发受到青睐,其鲜明的可随着系统自身和外界环境接触改善自身参数和性能,进而改变控制效果的特点,显示了其较强的适应能力,成为实际工作中的主要选择。
发动机神经网络自适应PID转速控制吴笑伟;史雷鸣【期刊名称】《农业科技与装备》【年(卷),期】2014(000)001【摘要】为提高发动机怠速控制的准确性,解决非线性、复杂的系统控制问题,详细介绍发动机模型建立方法、转速神经控制的结构和神经网络的形式,并将神经网络同PID控制很好的结合起来,以有效解决发动机转速控制问题。
%In order to improve the accuracy of engine idle speed control, and to solve the control problem of nonlinear, complex system, this article offers a detailed description of the establishment of engine model, the structures of speed neuron control and the form of neural network, and combines neural network PID control, to effectively solve the problem of engine speed control.【总页数】3页(P30-32)【作者】吴笑伟;史雷鸣【作者单位】河南交通职业技术学院汽车学院,郑州 450005;河南交通职业技术学院汽车学院,郑州 450005【正文语种】中文【中图分类】U467.2【相关文献】1.航空发动机自适应神经网络PID控制 [J], 张凯;谢寿生2.基于神经网络自适应PID的发动机转速控制对策分析 [J], 孙强;吴黎辉;姚峰;何敏;杨志杰3.基于神经网络PID的发动机转速控制系统 [J], 邢科龙;暨仲明4.基于神经网络自适应PID的发动机转速控制对策分析 [J], 孙强;吴黎辉;姚峰;何敏;杨志杰;5.神经元自适应PID控制的应用--以汽车发动机转速控制为例 [J], 林敬;朱伟兴因版权原因,仅展示原文概要,查看原文内容请购买。