⑶运用DTPSⅡ仿真软件制图
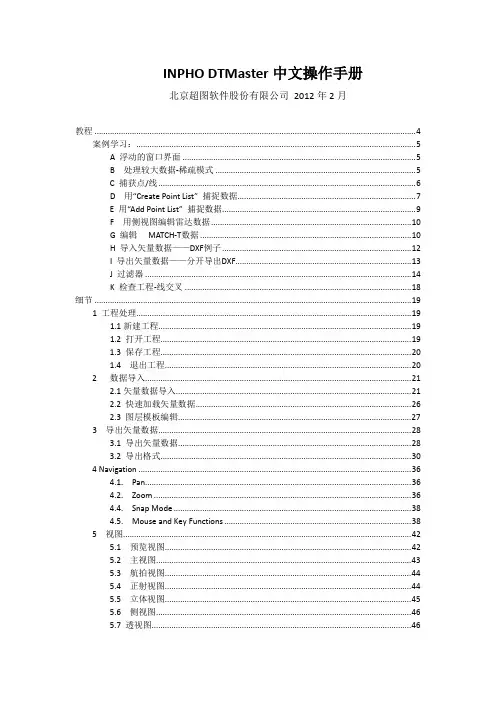
- 格式:pdf
- 大小:1.34 MB
- 文档页数:10
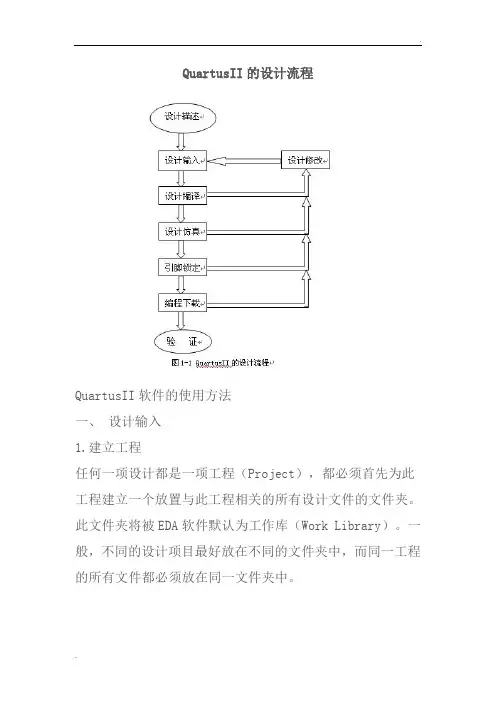
QuartusII的设计流程QuartusII软件的使用方法一、设计输入1.建立工程任何一项设计都是一项工程(Project),都必须首先为此工程建立一个放置与此工程相关的所有设计文件的文件夹。
此文件夹将被EDA软件默认为工作库(Work Library)。
一般,不同的设计项目最好放在不同的文件夹中,而同一工程的所有文件都必须放在同一文件夹中。
首先建立工作库目录,以便存储工程项目设计文件。
在D盘下新建文件夹并取名Mydesign。
双击QuartusII软件启动图标,即可启动QuartusII软件,启动界面如图1-2所示。
使用New Project Wizard 可以为工程指定工作目录、分配工程名称以及指定最高层设计实体的名称,还可以指定要在工程中使用的设计文件、其他源文件、用户库和EDA 工具,以及目标器件系列和具体器件等。
在此要利用“New Preject Wizard”工具选项创建此设计工程,并设定此工程的一些相关的信息,如工程名、目标器件、综合器、仿真器等。
(1)打开建立新工程管理窗。
选择菜单File→New Preject Wizard 命令,即弹出“工程设置”对话框(图1-3),以此来建立新的工程。
(2)在单击图1-3后,出现了设置工程的基本信息,如图1-4所示。
单击此对话框最上一栏右侧的“… ”按钮,可以选择工程存放在硬盘上的位置,此例中将工程放在D盘Mydesign文件夹下。
这三行的第一行的d:\Mydesign表示工程所在的工作库文件夹;第二行的half_add 表示此项工程的工程名,工程名可以取任何其他的名,也可直接用顶层文件的实体名作为工程名,在此就是按这种方式取的名;第三行是当前工程顶层文件的实体名,这里即为half_add。
(2)将设计文件加入工程中。
单击图1-4中的Next 按钮,弹出对话框如图1-5所示,在对话框中单击File name 右侧的“… ”按钮,可以将与工程相关的所有VHDL 文件(如果有的话)加入进此工程,此工程文件加入的方法有两种:第1 种方法是单击“Add … ”按钮,从工程目录中选出相关的VHDL 文件;第2 种方法是单击Add All 按钮,将设定的工程目录中的所有VHDL 文件加入到工程文件栏中。

中国焊接协会机器人焊接(厦门)培训基地推荐教材《焊接机器人离线编程及仿真系统应用》教学大纲适用专业:焊接技术及自动化专业相关专业修订年月:2013年10月修订人:刘伟、林庆平、纪承龙机械工业出版社一、课程名称课程中文名称:焊接机器人离线编程及仿真系统应用课程英文名称:Application For Robotic Arc Welding Off-Line Programming And Simulation System二、课程简介机器人离线编程系统是在机器人编程语言的基础上发展起来的,是机器人语言的拓展。
它利用机器人图形学的成果,建立起机器人及其作业环境的模型,再利用一些规划算法,通过对图形的操作和控制,在离线的情况下进行轨迹规划。
用机器人离线编程方式编制的机器人离线编程系统,在不接触实际机器人及机器人作业环境的情况下,通过图形技术,在计算机上提供一个和机器人进行交互作用的虚拟现实环境。
近年以来,离线编程引起了人们的广泛重视,并成为机器人学中一个十分活跃的研究方向。
目前,工业生产所采用的焊接机器人编程方式大多为示教编程。
操作人员利用示教盒控制机器人运动,使焊枪到达完成焊接作业所需位姿,并记录下各个示教点的焊枪位姿数据,随后,机器人便可以在"再现"状态完成这条焊缝的焊接。
离线编程系统则是借助模拟与离线编程软件,在办公室内完成机器人编程,无需中断生产。
机器人程序可提前准备就绪,提高整体生产效率,还可借助软件提供的各种工具,在不影响生产的前提下执行培训、编程和优化等任务,提升机器人系统的盈利能力,获得多种利益,如风险降低、投产更迅速、换线更快捷。
离线编程系统应用了模拟仿真技术,在虚拟现实环境下创建三维互动模型,便于观察模型结构、了解动态过程,执行十分逼真的模拟,所用的系统模型均为生产车间实际使用的真实机器人系统和相同的程序配置文件,可以不受时间和空间限制,完成机器人的编程(示教)工作。
DT Ⅱ(A )型带式输送机计算机辅助设计软件说明书一. 概述DT Ⅱ(A )型固定带式输送机是通用型系列产品,可广泛用于冶金、煤炭、交通、电力、建材、化工、轻工、粮食和机械等行业。
本软件依据GB/T17119-1997连续搬运设备带承载托辊的带式输送机运行功率和张力计算标准,参照《DT Ⅱ(A )型带式输送机设计手册》,对设备选型及计算运用Visual Baic 进行编程,可直接在Windows 环境下安装运行,可辅助设计人员快速准确的进行设计计算和选型,该软件计算中目前提供了十二种最常用的侧型,适用于带宽为400、500、650、800、1000、1200、1400、1600、1800、2000、2200、2400的输送机设计,计算输出结果包括:圆周驱动力、轴功率、电机功率、各相关参数值、各关键点输送带张力以及主要滚筒合力、拉紧力等。
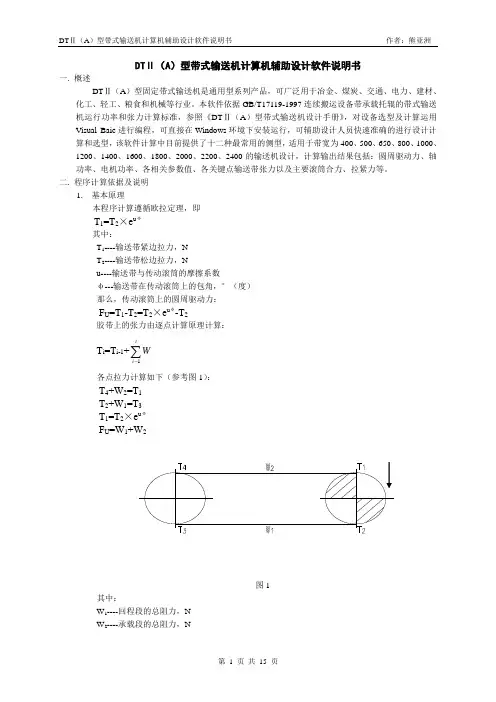
二. 程序计算依据及说明1. 基本原理本程序计算遵循欧拉定理,即T 1=T 2×e u φ其中:T 1----输送带紧边拉力,N T 2----输送带松边拉力,N u----输送带与传动滚筒的摩擦系数φ---输送带在传动滚筒上的包角,°(度) 那么,传动滚筒上的圆周驱动力:F U =T 1-T 2=T 2×e u φ-T 2胶带上的张力由逐点计算原理计算: T i =T i-1+∑-ii W 1各点拉力计算如下(参考图1):T 4+W 2=T 1T 2+W 1=T 3 T 1=T 2×e u φ F U =W 1+W 2图1其中:W 1----回程段的总阻力,N W 2----承载段的总阻力,N2. 主要计算公式1) 圆周驱动力计算F U =W 1+W 2=F H +F N +F s1+F s2+F st当机长大于80米时,水平输送的圆周力可简化为:F U =C·F H + F s1+F s2+F st其中:C-----系数,由表1查出,或由C=LL L 0计算,L 0=70m ~100m 之间 L------输送机长度,m F H ----主要阻力,NF N ----附加阻力,N ,程序在计算中将该力忽略不计 F s1----特种主要阻力,N F s2----特种附加阻力,N F st ----倾斜阻力,N 表1a)主要阻力F HF H =f L g [q RO +q RU +(2q B +qG )cos δ]式中:f-----模拟摩擦系数 L----输送机长度,单位:米g----重力加速度, g=9.81m/s 2~10 m/s 2q RO ----承载托辊单位质量,单位:千克/米,q RO =G1/a o G1-----承载分支每组托辊旋转部分质量,单位:千克 a o -------承载分支托辊间距,单位:米q RU ----回程托辊单位质量,单位:千克/米,q RU =G2/a u G2-----回程分支每组托辊旋转部分质量,单位:千克 a u -------回程分支托辊间距,单位:米 qB------输送带单位长度质量,单位:千克/米 qG-----物料单位长度上质量,单位:千克/米,qG=vQ 6.3 Q-------每小时输送量,单位:吨/小时 v--------输送速度,单位:米/秒δ------输送机倾角,单位:度 模拟摩擦系数参照下表2选取:表2b) 附加阻力F NF N =F ba +F f +F I +F t式中:F ba ---加料段、加速段输送物料与输送带间的惯性阻力和摩擦阻力,N F f ----加速段物料与导板间的摩擦阻力,N F I ----输送带经过滚筒时的弯曲阻力,N F t ----滚筒轴承阻力,N 其中:F ba =I v ρ(v-v 0)F f =2120b22)2(gl b v v v I u v +ρF I =9B(140+0.01F/B)(d/D) (帆布输送带) F I =12B(200+0.01F/B)(d/D) (钢绳芯输送带) F t =0.005(d 0/D)F T 式中:I v -----输送量,m 3/s ρ----物料的密度,kg/m 3 v-----带速,m/sv 0----在输送带运行方向上物料的输送速度分量,m/s u 2----物料与导料板间的摩擦系数,u 2=0.5~0.7 l b -----加速段长度,m B-----带宽,mF-----滚筒上输送带的平均张力,N d-----输送带厚度,m D-----滚筒直径,m d 0-----轴承直径,mF T -----作用于滚筒上的两个输送带拉力和滚筒旋转部分质量的向量和,N c)特种主要阻力F S1F S1=F e +F gl式中:F e -----托辊前倾阻力,NF gl -----输送物料与导料板间的摩擦阻力,N 其中:F e =C e u 0L e (qB+qG)gcos δsine (三个等长前倾托辊) F e =u 0L e qBgcos λcos δsine (二个等长前倾托辊) F gl =21222V gl b I u v ρ式中:C e ----槽角槽形系数,槽角λ=30°时,C e =0.4;槽角λ=45°时,C e =0.5 u 0----承载托辊和输送带间的摩擦系数,u 0=0.3~0.4 L e ----装有前倾托辊的设备长度,m e-----前倾角,°l-----装有导料板设备的长度,m b 1---导料槽两拦板间的宽度,mu 2----物料与导料板间的摩擦系数,u 0=0.5~0.7 d) 特种附加阻力F s2F s2=n r·F r +F a式中:n r -----清扫器个数,一个空段清扫器等于1.5个清扫器 F r -----输送带清扫器的摩擦阻力,N F a -----犁式卸料器的摩擦阻力,N 其中:F r =A·p·u 3 F a =B·k a式中:A-----输送带和清扫器的接触面积,m 2p------输送带和清扫器间的压力,一般p=30~100N/m 2 u 3-----输送带和清扫器接触的摩擦系数,u 3=0.5~0.7 k a -----刮板系数,一般k a =1500N/m e)倾斜阻力F stF st =qG×H×g×cos δH-----物料提升高度,m ,向上为正值;向下为负值2) 功率计算传动滚筒轴功率: P A =F U ×v (w) 电动机功率: P M =P A /η (w) 3) 输送带不打滑输送带不打滑,要求: F min >15.1-⨯φu Ue FF min 为驱动段皮带松边张力 4) 输送带垂度输送带在托辊间的垂度不能过小,应满足: 承载段:F czmin ≥8)(1000gqG qB a +回程段:F hcmin ≥8100gqB a u ⋅⋅⋅3. 最小张力的确定1) 先以输送带不打滑条件Fmin 初定皮带最小张力,即松边张力T2=Fmin ,将其与回程段皮带在托辊间垂度条件Fhcmin 进行对比,如果T2小于Fhcmin ,那么令T2=Fhcmin ,再根据逐点张力计算法推算出T3点的张力,将T3与Fczmin 进行比较,如果T3小于Fczmin ,则令T3=Fczmin ,这样T3就确定下来,由T3用逐点张力计算法推算出T2、T1及T4。
DT Ⅱ(A )型带式输送机计算机辅助设计软件说明书一. 概述DT Ⅱ(A )型固定带式输送机是通用型系列产品,可广泛用于冶金、煤炭、交通、电力、建材、化工、轻工、粮食和机械等行业。
本软件依据GB/T17119-1997连续搬运设备带承载托辊的带式输送机运行功率和张力计算标准,参照《DT Ⅱ(A )型带式输送机设计手册》,对设备选型及计算运用Visual Baic 进行编程,可直接在Windows 环境下安装运行,可辅助设计人员快速准确的进行设计计算和选型,该软件计算中目前提供了十二种最常用的侧型,适用于带宽为400、500、650、800、1000、1200、1400、1600、1800、2000、2200、2400的输送机设计,计算输出结果包括:圆周驱动力、轴功率、电机功率、各相关参数值、各关键点输送带张力以及主要滚筒合力、拉紧力等。
二. 程序计算依据及说明1. 基本原理本程序计算遵循欧拉定理,即T 1=T 2×e u φ其中:T 1----输送带紧边拉力,N T 2----输送带松边拉力,N u----输送带与传动滚筒的摩擦系数φ---输送带在传动滚筒上的包角,°(度) 那么,传动滚筒上的圆周驱动力:F U =T 1-T 2=T 2×e u φ-T 2胶带上的张力由逐点计算原理计算: T i =T i-1+∑-ii W 1各点拉力计算如下(参考图1):T 4+W 2=T 1T 2+W 1=T 3 T 1=T 2×e u φ F U =W 1+W 2图1其中:W 1----回程段的总阻力,N W 2----承载段的总阻力,N2. 主要计算公式1) 圆周驱动力计算F U =W 1+W 2=F H +F N +F s1+F s2+F st当机长大于80米时,水平输送的圆周力可简化为:F U =C·F H + F s1+F s2+F st其中:C-----系数,由表1查出,或由C=LL L 0计算,L 0=70m ~100m 之间 L------输送机长度,m F H ----主要阻力,NF N ----附加阻力,N ,程序在计算中将该力忽略不计 F s1----特种主要阻力,N F s2----特种附加阻力,N F st ----倾斜阻力,N 表1a)主要阻力F HF H =f L g [q RO +q RU +(2q B +qG )cos δ]式中:f-----模拟摩擦系数 L----输送机长度,单位:米g----重力加速度, g=9.81m/s 2~10 m/s 2q RO ----承载托辊单位质量,单位:千克/米,q RO =G1/a o G1-----承载分支每组托辊旋转部分质量,单位:千克 a o -------承载分支托辊间距,单位:米q RU ----回程托辊单位质量,单位:千克/米,q RU =G2/a u G2-----回程分支每组托辊旋转部分质量,单位:千克 a u -------回程分支托辊间距,单位:米 qB------输送带单位长度质量,单位:千克/米 qG-----物料单位长度上质量,单位:千克/米,qG=vQ 6.3 Q-------每小时输送量,单位:吨/小时 v--------输送速度,单位:米/秒δ------输送机倾角,单位:度 模拟摩擦系数参照下表2选取:表2b) 附加阻力F NF N =F ba +F f +F I +F t式中:F ba ---加料段、加速段输送物料与输送带间的惯性阻力和摩擦阻力,N F f ----加速段物料与导板间的摩擦阻力,N F I ----输送带经过滚筒时的弯曲阻力,N F t ----滚筒轴承阻力,N 其中:F ba =I v ρ(v-v 0)F f =2120b22)2(gl b v v v I u v +ρF I =9B(140+0.01F/B)(d/D) (帆布输送带) F I =12B(200+0.01F/B)(d/D) (钢绳芯输送带) F t =0.005(d 0/D)F T 式中:I v -----输送量,m 3/s ρ----物料的密度,kg/m 3 v-----带速,m/sv 0----在输送带运行方向上物料的输送速度分量,m/s u 2----物料与导料板间的摩擦系数,u 2=0.5~0.7 l b -----加速段长度,m B-----带宽,mF-----滚筒上输送带的平均张力,N d-----输送带厚度,m D-----滚筒直径,m d 0-----轴承直径,mF T -----作用于滚筒上的两个输送带拉力和滚筒旋转部分质量的向量和,N c)特种主要阻力F S1F S1=F e +F gl式中:F e -----托辊前倾阻力,NF gl -----输送物料与导料板间的摩擦阻力,N 其中:F e =C e u 0L e (qB+qG)gcos δsine (三个等长前倾托辊) F e =u 0L e qBgcos λcos δsine (二个等长前倾托辊) F gl =21222V gl b I u v ρ式中:C e ----槽角槽形系数,槽角λ=30°时,C e =0.4;槽角λ=45°时,C e =0.5 u 0----承载托辊和输送带间的摩擦系数,u 0=0.3~0.4 L e ----装有前倾托辊的设备长度,m e-----前倾角,°l-----装有导料板设备的长度,m b 1---导料槽两拦板间的宽度,mu 2----物料与导料板间的摩擦系数,u 0=0.5~0.7 d) 特种附加阻力F s2F s2=n r·F r +F a式中:n r -----清扫器个数,一个空段清扫器等于1.5个清扫器 F r -----输送带清扫器的摩擦阻力,N F a -----犁式卸料器的摩擦阻力,N 其中:F r =A·p·u 3 F a =B·k a式中:A-----输送带和清扫器的接触面积,m 2p------输送带和清扫器间的压力,一般p=30~100N/m 2 u 3-----输送带和清扫器接触的摩擦系数,u 3=0.5~0.7 k a -----刮板系数,一般k a =1500N/m e)倾斜阻力F stF st =qG×H×g×cos δH-----物料提升高度,m ,向上为正值;向下为负值2) 功率计算传动滚筒轴功率: P A =F U ×v (w) 电动机功率: P M =P A /η (w) 3) 输送带不打滑输送带不打滑,要求: F min >15.1-⨯φu Ue FF min 为驱动段皮带松边张力 4) 输送带垂度输送带在托辊间的垂度不能过小,应满足: 承载段:F czmin ≥8)(1000gqG qB a +回程段:F hcmin ≥8100gqB a u ⋅⋅⋅3. 最小张力的确定1) 先以输送带不打滑条件Fmin 初定皮带最小张力,即松边张力T2=Fmin ,将其与回程段皮带在托辊间垂度条件Fhcmin 进行对比,如果T2小于Fhcmin ,那么令T2=Fhcmin ,再根据逐点张力计算法推算出T3点的张力,将T3与Fczmin 进行比较,如果T3小于Fczmin ,则令T3=Fczmin ,这样T3就确定下来,由T3用逐点张力计算法推算出T2、T1及T4。
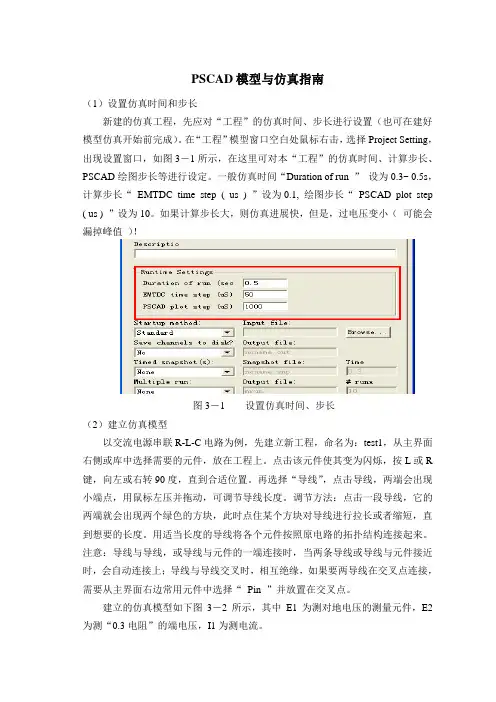
PSCAD模型与仿真指南(1)设置仿真时间和步长新建的仿真工程,先应对“工程”的仿真时间、步长进行设置(也可在建好模型仿真开始前完成)。
在“工程”模型窗口空白处鼠标右击,选择Project Setting,出现设置窗口,如图3-1所示,在这里可对本“工程”的仿真时间、计算步长、PSCAD绘图步长等进行设定。
一般仿真时间“Duration of run ”设为0.3~ 0.5s,计算步长“EMTDC time step ( us ) ”设为0.1, 绘图步长“PSCAD plot step ( us ) ”设为10。
如果计算步长大,则仿真进展快,但是,过电压变小(可能会漏掉峰值)!图3-1 设置仿真时间、步长(2)建立仿真模型以交流电源串联R-L-C电路为例,先建立新工程,命名为:test1,从主界面右侧或库中选择需要的元件,放在工程上。
点击该元件使其变为闪烁,按L或R 键,向左或右转90度,直到合适位置。
再选择“导线”,点击导线,两端会出现小端点,用鼠标左压并拖动,可调节导线长度。
调节方法:点击一段导线,它的两端就会出现两个绿色的方块,此时点住某个方块对导线进行拉长或者缩短,直到想要的长度。
用适当长度的导线将各个元件按照原电路的拓扑结构连接起来。
注意:导线与导线,或导线与元件的一端连接时,当两条导线或导线与元件接近时,会自动连接上;导线与导线交叉时,相互绝缘,如果要两导线在交叉点连接,需要从主界面右边常用元件中选择“Pin ”并放置在交叉点。
建立的仿真模型如下图3-2所示,其中E1为测对地电压的测量元件,E2为测“0.3电阻”的端电压,I1为测电流。
图3-2 工程中的元件、导线和电路模型建立电路模型时应该注意:(1)模型中的元件,特别是同类元件的名字绝对不得重复。
(2)模型图上若有任何无关的东西,例如:一条悬空线、点,或者参数设置不对,例如:负荷及其变压器的容量大于电源变压器的容量,则运行时就会出错。
DTPS for GII 操作顺序1、建立Installation link (设备链接) ● 启动DTPS 程序。
● 单击菜单栏“File ”,选择下拉菜单“Add Control ”的子菜单“Installation link ”。
● 在弹出的对话框中,Installation Link Name 框中输入您所要建立的Link 的名称;Link 框中输入要保存数据的位置;并将New 选中。
单击“OK ”后就建立了新的Link 。
√2、建立Installation。
●单击Installation左侧的,显示下一级文件夹。
右键单击刚才建立的Installation link(例:DTPSDATA),选中Property,出现Property对话框。
●单击“Add Installation”按钮,●在弹出的对话框中输入Installation名称,并选择要使用的机器人台数,单击“OK”。
●出现“It creates installation. Are you sure?”后,单击“是”。
这样,在刚才的Installation Link中就新建了一个Installation。
(例:PWST-TEST)3、添加Group和Object,并给新的文件重命名。
●在左侧窗口中单击已经建立的Installation(PWST-TEST)后,在右侧出现3个窗口,左上角是Group窗口,右上角是Object窗口。
在这两个窗口中单击New,可新建Group和Object。
单击Rename可将建立的Group 和Object重命名。
4、设定机器人参数。
●右键单击建立的Installation(PWST-TEST),选择Property,单击Installation Editor。
出现下面的编辑窗口。
●单击菜单栏的Robot,从下拉菜单中选择Property。
或者双击左侧窗格中的R001-ROBOT。
●出现Robot information窗口。
PDPS仿真软件之点云技术随着计算机、微电子、信息和自动化技术的迅速发展,并在制造业中得到越来越广泛的应用,而先后出现了数控、柔性制造单元、柔性制造系统、计算机辅助设计/制造、计算机集成制造系统、制造资源规划、精益生产、敏捷制造、可重组技术、三维扫描技术、快速原型制造等多项先进制造技术与制造模式。
制造业正经历一场新的技术革命。
目前制造技术已发展成为一个蕴涵整个生产过程,跨学科高度复杂的集成技术,三维扫描技术正是其中重要的一项。
三维重建技术是计算机视觉、逆向工程、虚拟现实等研究领域中的一个重要问题,是计算机图形学的重要组成部分。
随着科学技术的不断发展,传统的基于图像的三维重建方法由于在精确度上、重建速度上、算法适用性上都有着不可避免的缺陷,已很难满足人们对高精度、真实感三维模型建模和绘制的要求,而基于点云的三维重建技术可以直接通过物体表面离散点简单快捷地重构出高度真实的三维模型,因此已成为当前三维重建技术研究的热点,也是其中的重点和难点。
通过三维激光扫描仪采集物体表面点云,接着对采样点云进行简化处理,进而对简化后的点云采用网格前沿生成算法进行三角网格化,从而恢复出具有真实感的三维物体网格表面模型。
工厂激光扫描的点云和仿真技术的应用流程如下:结合Tecnomatix 软件将在工厂激光扫描的点云和仿真技术紧密地融合,利用扫描设备对象扫描成点云,可直接导入Process Designer 中,从而更紧密地将现实工厂与虚拟工厂结合,不断地优化和仿真确认得到最佳的工厂设计方案。
点云是一组数据点,表示一个三维系统,通常由一个三维扫描仪创建。
在点云的点代表一个扫描三维物体的外表面。
使用3D 扫描仪,可以扫描复杂的对象(例如,制造厂),创建扫描物体的3D 模型,并存储该结果作为一个点云文件。
然后,您可以导入POD 格式(如果需•调查&扫描•仿真验证要的话,首先将其转换为POD格式)的点云到Process Designer,就像任何其他的对象,它可以显示在图形查看器和对象树。
电力系统仿真软件的使用方法电力系统是现代社会中不可或缺的基础设施,电力系统的稳定运行对于社会经济发展至关重要。
为了确保电力系统的可靠性和安全性,电力系统的仿真分析工作变得越来越重要。
而电力系统仿真软件则是进行仿真分析的重要工具之一。
本文将介绍电力系统仿真软件的使用方法,以帮助用户利用该软件进行电力系统的仿真分析。
一、安装电力系统仿真软件步骤1:从官方网站下载电力系统仿真软件的安装程序;步骤2:运行安装程序,按照提示完成软件的安装;步骤3:根据软件提供的许可证信息进行激活。
二、软件界面的主要组成部分电力系统仿真软件的界面一般包括以下主要部分:1. 菜单栏:提供各种软件功能的入口,例如文件管理、模型设置、仿真参数配置等;2. 工具栏:提供常用的功能按钮,方便用户快速执行特定操作;3. 绘图区:用于显示电力系统的拓扑结构、物理参数及仿真结果;4. 属性栏:显示当前选中元件或对象的属性信息,并提供相应的配置选项;5. 运行状态栏:显示仿真运行状态、进度等相关信息。
三、建立电力系统模型1. 导入或创建电力系统模型:可以从外部文件导入电力系统模型(如PSS/E、PSLF等格式),也可以直接在软件中创建电力系统模型;2. 定义电力系统元件:根据实际情况,选择并添加合适的电力系统元件,如变压器、发电机、传输线等;3. 连接电力系统元件:使用软件提供的连接功能,将各个电力系统元件按照其在实际电力系统中的连接关系进行连接。
四、配置仿真参数1. 选择仿真模式:根据需要选择仿真模式,如稳态仿真、暂态仿真、短路分析等;2. 设置仿真时间:根据仿真目的和要求,设定仿真的开始时间和结束时间;3. 定义负载情况:根据实际情况,设置电力系统的负载情况,如负载功率、负载模型等;4. 配置仿真计算参数:根据需要设置仿真的精度和收敛要求等。
五、运行仿真和分析仿真结果1. 运行仿真:点击软件界面上的“运行”按钮,启动仿真计算;2. 监视仿真过程:在仿真计算过程中,可以监视仿真的运行状态和进度,并根据需要进行调整;3. 分析仿真结果:仿真计算完成后,可以查看仿真结果,并进行进一步的分析。
仿真软件的使用教程与案例展示一、引言随着信息技术的迅速发展,仿真软件在各个领域得到了广泛的应用。
仿真软件使用教程的编写可以帮助用户快速掌握软件的操作技巧,并展示一些已经成功运用仿真软件的案例,为用户提供实际应用的参考。
二、仿真软件的概念仿真软件是指通过计算机模拟和复制实际运行的系统或过程,以便研究该系统或过程的行为和性能。
它可以对各种系统进行数字模拟,帮助用户进行样品测试、参数优化、风险评估和决策分析等工作。
三、仿真软件的使用教程1. 界面介绍:用户第一次打开仿真软件时,需要了解软件的界面布局和功能按钮的作用。
一般来说,仿真软件的界面分为菜单栏、工具栏、视图窗口和属性设置栏等部分。
详细了解界面布局可以让用户更高效地进行后续操作。
2. 创建模型:仿真软件通常需要用户自行创建模型,模型是仿真的对象,可以是一个物理系统、一个流程或一个决策场景等。
用户需要根据模型的特点和需求选择合适的模型创建方式,并设置模型的各项参数。
创建模型可以通过图形化界面操作,也可以通过编程实现。
3. 参数设置:在创建模型的过程中,用户需要设置各种参数,如模型的尺寸、材料属性、初始状态等。
这些参数的设置会直接影响到仿真模拟的结果。
教程中需要详细说明各个参数的含义和调整方法,以及参数设置对仿真结果的影响。
4. 仿真运行:模型创建完成后,用户需要进行仿真运行以获取模型的行为和性能数据。
教程应该详细介绍仿真运行的操作步骤,包括设置仿真时间、选择仿真方法、运行仿真等。
此外,也需要介绍仿真运行过程中的状态监测和结果输出等功能。
5. 结果分析:仿真软件通常会生成大量的仿真结果数据,用户需要对这些数据进行分析和解释。
教程可以介绍常用的结果分析方法,如数据绘图、统计分析和数据对比等。
同时,还可以引导用户根据结果分析来优化模型参数,以达到更好的仿真效果。
四、仿真软件的案例展示1. 航空航天领域仿真案例:使用仿真软件可以模拟飞机的飞行轨迹、燃料消耗和机身载荷等,为飞机设计和改进提供参考。
维修电⼯实训仿真软件使⽤说明书⼀、概述本软件为维修电⼯实验装置的配套仿真软件,利⽤多媒体技术提⾼学⽣对实验的兴趣,促进学⽣对维修电⼯知识的掌握,软件中每个实验分为对实验器材的介绍,对实验原理的简单仿真,实验的模拟仿真,以及实验线路的设置故障和排除故障等⼏部分组成。
⼆、操作说明运⾏"维修电⼯"安装⽂件,安装完毕。
点击桌⾯的"维修电⼯.swf",进⼊主菜单,如下图:在界⾯左侧中部是实验仿真项⽬选择,⼀共可以进⾏15个实验项⽬的仿真,点击其中⼀个进⼊某⼀个仿真实验界⾯如下图:默认进⼊所选择实验项⽬的"实验⽬的"页⾯,点击页⾯左下侧的实验步骤选择按钮或者页⾯正下部分的箭头,可以分别进⼊"实验器材"、"实验原理"、"实验操作"、"设故排故障"页⾯分别进⾏操作。
以下分别为"⼯作台⾃动往返运动控制线路实验"的实验器材页⾯、实验原理页⾯、实验操作页⾯和设故排故页⾯:实验器材实验原理实验操作设故排故实验⽬的页⾯:说明本次实验的⽬的;实验器材页⾯:对实验所需要⽤到的实验器材进⾏图⽚展⽰和⽂字说明,移动⿏标到相应的图⽚均会出现相对应的⽂字说明;实验原理页⾯:本软件的实验项⽬分为电⼒拖动系列和模拟电路系列,其中电⼒拖动系列的实验原理为对实验原理图进⾏操作仿真,使⽤者可以对其中的开关、按钮进⾏操作,模拟电路系列为实验原理动画播放⽅式浏览;实验操作页⾯:对实验现象进⾏交互式设计,使⽤者可对线路的原件进⾏操作仿真,模拟现实实验现象(注:当⿏标移动⾄可操作位置将会有声⾳提⽰);设故排故页⾯:使⽤者可以⼿动设置故障,根据对故障现象的⽂字说明,判断线路的具体故障点,然后使⽤万⽤表的两个探针放置在可疑故障点两端,如果判断正确,系统会给出判断结果并停⽌倒计时,如错误就继续测试,直⾄检测出故障点。