一、视距测量的概念 视距测量是根据几何光学原理,利用仪器望远镜筒内的视距丝在标尺上截取读数,应用三角公式计算两点距离,可同时测定地面上两点间水平距离和高差的测量方法。视距测量的优点是,操作方便、观测快捷,一般不受地形影响。其缺点是,测量视距和高差的精度较低,测距相对误差约为1/200~1/300。尽管视距测量的精度较低,但还是能满足测量地形图碎部点的要求,所以在测绘地形图时,常采用视距测量的方法测量距离和高差。 二、视距测量的计算公式 (一)望远镜视线水平时测量平距和高差的计算公式 如图4-7 所示,测地面两点的水平距离和高差,在点安置仪器,在点竖立视距尺,当望远镜视线水平时,水平视线与标尺垂直,中丝读数为,上下视距丝在视距尺上的位置读数之差称为视距间隔,用表示。 1、水平距离计算公式 设仪器中心到物镜中心的距离为,物镜焦距为,物镜焦点到点的距离为,由图4-7可知两点间的水平距离为,根据图中相似三角形成比例的关系得两点间水平距离为: (4-7)式中:为视距乘常数,用表示,其值在设计中为100。为视距加常数,仪器设计为0。 则视线水平时水平距离公式:
(4-8) 式中—视距乘常数其值等于100。 —视距间隔。 2、高差的计算公式: 两点间的高差由仪器高和中丝读数求得,即: (4-9) 式中:—仪器高,地面点至仪器横轴中心的高度。 (二)望远镜视线倾斜时测量平距和高差的公式 在地面起伏比较大的地区进行视距测量时,需要望远镜倾斜才能照准视距标尺读取读数,此时视准轴不垂直于视距标尺,不能用式4-8计算距离和高差。如图4-8所示,下面介绍视准轴倾斜时求水平距离和高差的计算公式。 视线倾斜时竖直角为,上下视距丝在视距标尺上所截的位置为,,视距间隔为,求算、两点间的水平距离。 首先将视距间隔换算成相当于视线垂直时的视距间隔之距离,按式4-8求出倾斜视线的距离′,其次利用倾斜视线的距离′和竖直角计算为水平距离。因上下丝的夹角很小,则认为∠和∠为90°,设将视距尺旋转角,根据三角函数得视线倾斜时水平距离计算式为式(4-10),两点高差计算公式为式(4-11)。
方法简介 视距测量是利用经纬仪、水准仪的望远镜内十字丝分划板上的视距丝在视距尺(水准尺)上读数,根据光学和几何学原理,同时测定仪器到地面点的水平距离和高差的一种方法。这种方法具有操作简便、速度快、不受地面起伏变化的影响的优点,被广泛应用于碎部测量中。但其测距精度低,约为:1/200-1/300。 一、视距测量原理 1.视线水平时的距离与高差公式 欲测定A、B两点间的水平距离D及高差h,可在A点安置经纬仪,B 点立视距尺,设望远镜视线水平,瞄准B点视距尺,此时视线与视距尺垂直。求得上,下视距丝读数之差。上,下丝读数之差称为视距间隔或尺间隔。 2.视线倾斜时的距离与高差公式 在地面起伏较大的地区进行视距测量的,必须使视线倾斜才能读取视距间隔。由于视线不垂直于视距尺,故不能直接应用上述公式。 二、视距测量的观测与计算 施测时,安置仪器于A点,量出仪器高i,转动照准部瞄准B点视距尺,分别渎取上、下、中三丝的读数,计算视距间隔。再使竖盘指标水准管气泡居中(如为竖盘指标自动补偿装置的经纬仪则无此项操作),读取竖盘读数,并计算竖直角。用计算器计算出水平距离和高差。 三、视距测量误差及注意事项 1.视距测量的误差 读数误差用视距丝在视距尺上读数的误差,与尺子最小分划的宽度、水平距离的远近和望远镜放大倍率等因素有关,因此读数误差的大小,视使用的仪器,作业条件而定。 垂直折光影响祝距尺不同部分的光线是通过不同密度的空气层到达望远镜的,越接近地面的光线受折光影响越显著。经验证明,当视线接近地面在视距尺上读数时,垂直折光引起的误差较大,并且这种误差与距离的平方成比例地增加。 视距尺倾斜所引起的误差视距尺倾斜误差的影响与竖直角有关,尺身倾斜对视距精度的影响很大。
TDOA定位的Chan算法MATLAB源代码Chan算法是解决TDOA定位的经典算法,被众多的论文所引用。 function [POS_ref,POS1,POS2,POS3,POS4] = TDOA_chan(R,Pbs,Q) %% TDOA定位定位Chan算法 % GreenSim团队——专业级算法设计&代写程序 % 欢迎访问GreenSim团队主页→https://www.doczj.com/doc/fd157741.html,/greensim %********************************************************* % CHAN算法,假设移动台与各基站位置较近,需进行三四WLS计算 % 输入参数: % R(N-1×1): TDOA测量值 % Pbs(N×2): 基站的坐标,第一列为X,第二列为Y;参考基站坐标位于第一行% 输出参数: % POS_ref(2X1):第一次WLS的估计结果,作为参考作最终定位结果的判决% POS1(2X1) :定位结果1 % POS2(2X1) :定位结果2 % POS3(2X1) :定位结果3 % POS4(2X1) :定位结果4 %这段程序用于自己产生算法输入参数,用于算法测试 % delta = 10; %TDOA测量误差的标准差,用于产生Q矩阵 % M=4; %参考基站外的基站数量 % Xb = 20;Yb = 100; %参考的基站坐标 % X = zeros(M,2); % a = 2*pi/M; % for i=1:M %生成其他基站的坐标 % X(i,1) = 400*cos(a*(i-1)); % X(i,2) = 400*sin(a*(i-1)); % end % Xreal = -150;Yreal = 200;%移动台真实坐标 % %产生TDOA测量结果 % Rb = sqrt((Xreal - Xb)^2+(Yreal - Yb)^2);%移动台到基站的真实距离 % N = normrnd(0,delta,1,M);%产生TDOA测量误差 % Kb = Xb^2+Yb^2; % R = zeros(M,1); % for i=1:M %产生TDOA测量值 % R(i) = -Rb+sqrt((Xreal - X(i,1))^2+(Yreal - X(i,2))^2)+N(i); % end % Q = (0.5*eye(M)+0.5*ones(M))*(delta^2); % Pbs = [Xb Yb;X]; % N = 5; % [POS_ref POS1 POS2 POS3 POS4] = TDOA_chan(R,Pbs,Q) N = size(Pbs,1);
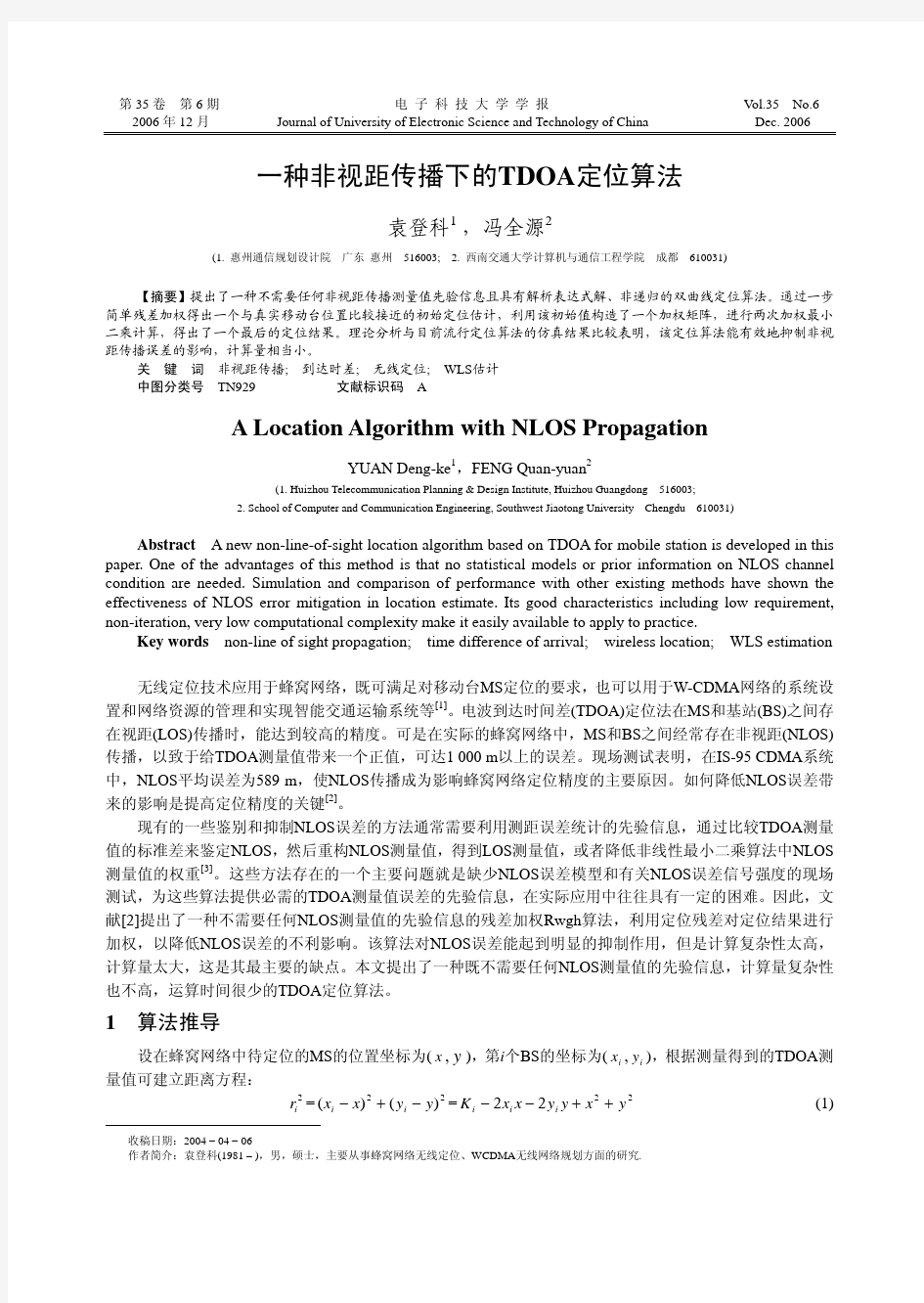
如图8-5所示,如果我们把竖立在B 点上视距尺的尺间隔MN ,化算成与视线相垂直的尺间隔M ′N ′,就可用式(8-2)计算出倾斜距离L 。然后再根据L 和垂直角α,算出水平距离D 和高差h 。 从图8-5可知,在△EM ′M 和△EN ′N 中,由于φ角很小(约34′),可把∠EM ′M 和∠EN ′N 视为直角。而∠MEM ′=∠NEN ′=α,因此 ααααcos cos )(cos cos MN EN ME EN ME N E E M N M =+=+='+'='' 式中M ′N ′就是假设视距尺与视线相垂直的尺间隔l ′, 图8-5 视线倾斜时的视距测量原理
MN 是尺间隔l ,所以 αcos l l =' 将上式代入式(8-2),得倾斜距离L αcos Kl l K L ='= 因此,A 、B 两点间的水平距离为: αα2cos cos Kl L D == (8-4) 式(8-4)为视线倾斜时水平距离的计算公式。 由图8-5可以看出,A 、B 两点间的高差h 为: v i h h -+'= 式中 h ′——高差主值(也称初算高差)。 α ααα2sin 2 1 sin cos sin Kl Kl L h = ==' (8-5) 所以 v i Kl h -+=α2sin 2 1 (8-6) 式(8-6)为视线倾斜时高差的计算公式。
二、视距测量的施测与计算 1.视距测量的施测 (1)如图8-5所示,在A 点安置经纬仪,量取仪器高i ,在B 点竖立视距尺。 (2)盘左(或盘右)位置,转动照准部瞄准B 点视距尺,分别读取上、下、中三丝读数,并算出尺间隔l 。 (3)转动竖盘指标水准管微动螺旋,使竖盘指标水准管气泡居中,读取竖盘读数,并计算垂直角α。 (4)根据尺间隔l 、垂直角α、仪器高i 及中丝读数v ,计算水平距离D 和高差h 。 2.视距测量的计算 例8-1 以表8-1中的已知数据和测点1的观测数据为例,计算A 、1两点间的水平距离和1点的高程。 解 ()[]m 14.15784812cos m 574.1100cos 2 2 1 ='''?+??==αKl D A v i Kl h A -+=α2sin 2 1 1
摘要 无线定位服务是一种有着广阔市场前景的移动增值业务,基本原理是利用现有蜂窝网络,通过对各种位置特征参数,包括到达时间(TOA)、到达时间差(TDOA)、到达方向(DOA)的测量和估计,来实现移动用户的定位。本论文对无线通信网络中基于TDOA的无线定位技术进行了研究。 本文分析了国内外相关研究现状,给出了移动台定位的几种基本方法,并给出了TDOA定位的双曲线数学模型,分析了基于TDOA定位的Chan算法、遗传算法(GA)和差分演进算法(DE),并对其进行了计算机仿真。仿真结果表明,三种算法各有优缺点:Chan算法定位精度较低但运算速度很快,GA算法和DE算法定位精度高但收敛时间较长。 在上述研究的基础上,本论文提出了三种新的定位算法:基于TDOA的Chan-GA算法、Chan-DE算法和Chan-IDE算法。并在相同的仿真环境下进行比较,仿真结果表明,在保证种群数量的情况下,所提的算法性能稳定,能找到逼近全局最优点的解,相对于Chan算法精度更高,相对于以前的算法在保证收敛性能的前提下有更快的收敛速度。 关键词:移动台定位;到达时间差;遗传算法;差分演进算法;免疫算法
ABSTRACT Cellular wireless location service is a new mobile value-added service with a good market future. Its basic principle is to implement mobile user location through estimating characteristic parameters relative to position, including time-of-arrival (TOA), time-difference-of-arrival (TDOA), direction-of-arrival (DOA), etc. This thesis aims at the research of wireless location technology based on time-related measurements in Wireless Communication System. The thesis analyzes the domestic and foreign correlation research of present situation, and gives several essential methods of mobile location. After that, the mathematical model of TDOA hyperbolic equations is established, three location algorithms based on time-difference-of-arrival (TDOA), Chan, genetic algorithm and Differential Evolution are analyzed, and have been carried on the simulation to them. The simulation results show that all the algorithms have the advantages and disadvantages.The Chan algorithm has bad location accuracy and very quick operating speed. To the contrary, the genetic algorithm and Differential Evolution have a high accuracy and a fast convergence time. Based on the above investigation, three new location algorithms called Chan-GA algorithm, Chan-DE algorithm and Chan-IDE algorithm based on TDOA measurements are put forward. Carrying on the computer simulation to them under the same environment, the simulation results show that if the population size is big enough, the algorithm is robust and can find the coordinates. It has a higher accuracy than Chan algorithms and a faster convergence time than genetic algorithm. Key words: Mobile location; TDOA; Genetic algorithm; Differential Evolution; Immune algorithm
TDOA定位的Chan算法MATLAB源代码。 function [POS_ref,POS1,POS2,POS3,POS4] = TDOA_chan(R,Pbs,Q) %********************************************************* % CHAN算法,假设移动台与各基站位置较近,需进行三四WLS计算 % 输入参数: % R(N-1×1): TDOA测量值 % Pbs(N×2): 基站的坐标,第一列为X,第二列为Y;参考基站坐标位于第一行% 输出参数: % POS_ref(2X1):第一次WLS的估计结果,作为参考作最终定位结果的判决 % POS1(2X1) :定位结果1 % POS2(2X1) :定位结果2 % POS3(2X1) :定位结果3 % POS4(2X1) :定位结果4 %这段程序用于自己产生算法输入参数,用于算法测试 % delta = 10; %TDOA测量误差的标准差,用于产生Q矩阵 % M=4; %参考基站外的基站数量 % Xb = 20;Yb = 100; %参考的基站坐标 % X = zeros(M,2);%M行2列0 % a = 2*pi/M; % for i=1:M %生成其他基站的坐标 % X(i,1) = 400*cos(a*(i-1)); % X(i,2) = 400*sin(a*(i-1)); % end % Xreal = -150;Yreal = 200;%移动台真实坐标 % %产生TDOA测量结果 % Rb = sqrt((Xreal - Xb)^2+(Yreal - Yb)^2);%移动台到基站的真实距离 % N = normrnd(0,delta,1,M);%产生TDOA测量误差正态分布均值0 标准差delta 返回一个N数组,下标为1 到M % Kb = Xb^2+Yb^2; % R = zeros(M,1); % for i=1:M %产生TDOA测量值 % R(i) = -Rb+sqrt((Xreal - X(i,1))^2+(Yreal - X(i,2))^2)+N(i); % end % Q = (0.5*eye(M)+0.5*ones(M))*(delta^2); % Pbs = [Xb Yb;X];%矩阵 % N = 5; % [POS_ref POS1 POS2 POS3 POS4] = TDOA_chan(R,Pbs,Q) N = size(Pbs,1);%维度 K = zeros(1,N); K = Pbs(:,1).^2 + Pbs(:,2).^2; ha = 0.5*(R.^2-K(2:N)+K(1)) Ga = -[Pbs(2:N,1)-Pbs(1,1) Pbs(2:N,2)-Pbs(1,2) R]
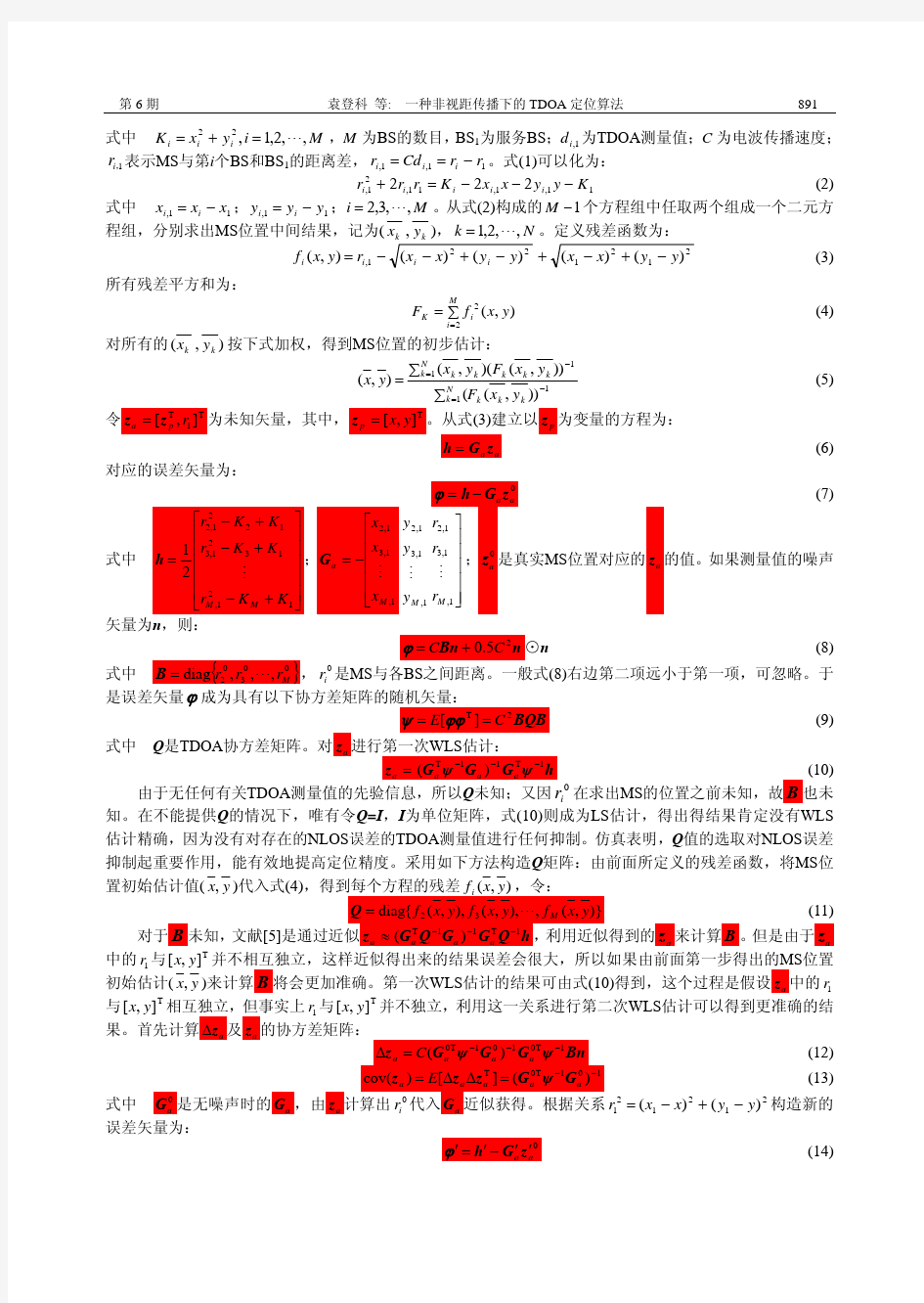
经纬仪视距法测距 视距法测距所用的工具是经纬仪和视距尺。利用经纬仪望远镜中十字丝的上下两根短横丝,在视距尺上读得的上下两数之差以及其他一些数据,即可算出安置仪器点到立尺点的水平距离和高差。一、视距法测距原理 若在等腰三角形中有一条边和一个角为已知,就可以推算出另一条边长,这便是视距法测距的简单工作原理。 二、视距计算公式 (一)视准轴水平时的视距公式 如图,mn p =为视距丝间隔,MFN ∠为定角,F 为物镜前焦点,f 为焦距,s 为物镜离仪器中心的距离,'''N M t =为尺间隔,d’为焦点到视距尺的距离,D’为AB 之间的水平距离。 由图可以看出:MFN ?≌mFn ?,所以有: p f t d =' ',即''t p f d ?= 因 )(''s f d D ++=,故有)(''s f t p f D ++?=。设 p f C =,s f Q +=,则上式改写为:Q t C D +?='' C ——视距乘常数。制造仪器时,一般将C 设计为100。 Q ——视距加常数。对于内调焦望远镜,其加常数接近于0,可忽略不计。 (二)视准轴倾斜时的视距公式 1、水平距离公式
若两点高差很大,则不可能用水平 视线进行视距测量,必须把望远镜视准轴 放在倾斜位置,如尺子仍竖直立着,则视 准轴不与尺面垂直,上面推导的公式就不 适用了。若要把视距尺与望远镜视准轴垂 直,那是办不到的。因此在推导水平距离 的公式时,必须导入两项改正:(1)对于 视距尺不垂直于视准轴的改正;(2)视线 倾斜的改正。水平距离公式为: δ2 S其中:δ为竖角。 =D cos ? 2、高差公式 + ? L h- =δ其中:i为仪器高,L为目标高。 i tg D 三、视距法测距的作业方法 1、将经纬仪安置在测站上,对中、整平; 2、量仪器高i(量至厘米); 3、将视距尺立于待测点上,用望远镜瞄准视距尺,分别读出上、下视距丝和中丝读数,再读取竖盘读数,并将所有读得的数据记入视距测量手簿中。 4、根据上、下丝视距读数,算出尺间隔t,把竖盘读数换算为竖角,再计算测站到测点的水平距离和高差。
如图8-5所示,如果我们把竖立在B点上视距尺得尺间隔MN,化算成与视线相垂直得尺间隔M′N′,就可用式(8-2)计算出倾斜距离L。然后再根据L与垂直角α,算出水平距离D与高差h。 图8-5 视线倾斜时得视距测量原理 从图8-5可知,在△EM′M与△EN′N中,由于φ角很小(约34′),可把∠EM′M与∠EN′N视为直角。而∠MEM′
=∠NEN ′=α,因此 ααααcos cos )(cos cos MN EN ME EN ME N E E M N M =+=+='+'='' 式中M ′N ′就就是假设视距尺与视线相垂直得尺间隔l ′,MN 就是尺间隔l ,所以 αcos l l =' 将上式代入式(8-2),得倾斜距离L αcos Kl l K L ='= 因此,A 、B 两点间得水平距离为: αα2 cos cos Kl L D == (8-4) 式(8-4)为视线倾斜时水平距离得计算公式。 由图8-5可以瞧出,A 、B 两点间得高差h 为: v i h h -+'= 式中 h ′——高差主值(也称初算高差)。 α ααα2sin 21 sin cos sin Kl Kl L h ===' (8-5)
所以 1 =α2 sin + v h- i Kl 2 (8-6) 式(8-6)为视线倾斜时高差得计算公式。 二、视距测量得施测与计算 1.视距测量得施测 (1)如图8-5所示,在A点安置经纬仪,量取仪器高i,在B点竖立视距尺。 (2)盘左(或盘右)位置,转动照准部瞄准B点视距尺,分别读取上、下、中三丝读数,并算出尺间隔l。 (3)转动竖盘指标水准管微动螺旋,使竖盘指标水准管气泡居中,读取竖盘读数,并计算垂直角α。 (4)根据尺间隔l、垂直角α、仪器高i及中丝读数v,计算水平距离D与高差h。 2.视距测量得计算
第四章距离测量 一、学习目的与要求 学习目的 认识距离测量设备的组成部分及其用途,清楚距离测量原理,掌握距离测量方法。通过实验,达到独立操作仪器设备,完成水平距离的测量、检核、成果整理所必须具备的实践能力。 学习要求 1.认识距离丈量工具,了解钢尺量距的一般方法方法,学会量距成果的整理。 2.清楚视距测量的原理,掌握用视距测量的方法进行水平距离和高差的测定。 3.了解电磁波测距的基本原理原理。 二、课程内容与知识点 1.钢尺量距 丈量工具:钢尺、测钎、垂球、标杆。 直线定线:在两点间定线、两点延长线上定线。 2.一般精度量距方法:前尺手,后尺手。标点、定点、对点、持平投点。往测、返测。相对误差,相对成果。 公式: 3.视距测量 视距测量的原理,视准轴水平、视准轴倾斜。 公式: 观测方法和步骤。
视距常数测定,视距测量误差分析。 掌握用视距测量的方法进行水平距离和高差的测定。 5.电磁波测距简介 电磁波测距仪的分类:激光测距仪、微波测距仪及红外测距仪。 电磁波测距原理:通过光波在两点间传播的时间来确定距离。 公式: L=(1/2ct 三、本章小结 识记:水平距离,直线定线,量距相对误差,往返测量,视距测量,视距常数。 领会:定线原理,钢尺量距的方法,相对误差。视距测量计算公式中各符号的含义。光电测距原理。 应用:用钢尺按往返测,用一般的方法进行距离测量;再用经纬仪按视距测量的方法进行测量;比较计算结果和精度。 四、习题与思考题 1.如何衡量距离测量精度?用钢尺丈量了AB、CD两段距离,AB的往测值为307.82m,返测值为307.72m,CD的往测值为10 2.34m,返测值为102.44m,问两段距离丈量的精度是否相同?哪段精度高? 2.下列为视距测量成果,计算各点所测水平距离和高差。 测站H0=50.OOm 仪器高i=1.56m 中丝读数竖盘读数竖直角高差水平距离高程备注 点号上丝读数 下丝读数 尺间隔 1 1.845 1.40 86°28′ 0.960 2 2.165 1.40 97°24′
如图8-5所示,如果我们把竖立在B点上视距尺的尺间隔MN,化算成与视线相垂直的尺间隔M′N′,就可用式(8-2)计算出倾斜距离L。然后再根据L和垂直角α,算出水平距离D和高差h。 图8-5 视线倾斜时的视距测量原理 从图8-5可知,在△EM′M和△EN′N中,由于φ角很小(约34′),可把∠EM′M和∠EN′N视为直角。
而∠MEM ′=∠NEN ′=α,因此 ααααcos cos )(cos cos MN EN ME EN ME N E E M N M =+=+='+'='' 式中M ′N ′就是假设视距尺与视线相垂直的尺间隔l ′,MN 是尺间隔l ,所以 αcos l l =' 将上式代入式(8-2),得倾斜距离L αcos Kl l K L ='= 因此,A 、B 两点间的水平距离为: αα2 cos cos Kl L D == (8-4) 式(8-4)为视线倾斜时水平距离的计算公式。 由图8-5可以看出,A 、B 两点间的高差h 为: v i h h -+'= 式中 h ′——高差主值(也称初算高差)。 α ααα2sin 21 sin cos sin Kl Kl L h ==='
(8-5) 所以 1 sin v i =α2 + h- Kl 2 (8-6) 式(8-6)为视线倾斜时高差的计算公式。 二、视距测量的施测与计算 1.视距测量的施测 (1)如图8-5所示,在A点安置经纬仪,量取仪器高i,在B点竖立视距尺。 (2)盘左(或盘右)位置,转动照准部瞄准B 点视距尺,分别读取上、下、中三丝读数,并算出尺间隔l。 (3)转动竖盘指标水准管微动螺旋,使竖盘指标水准管气泡居中,读取竖盘读数,并计算垂直角α。
经纬仪视距法测距 视距法测距所用的工具是经纬仪和视距尺。利用经纬仪望远镜中十字丝的上下两根短横丝,在视距尺上读得的上下两数之差以及其他一些数据,即可算出安置仪器点到立尺点的水平距离和高差。一、视距法测距原理 若在等腰三角形中有一条边和一个角为已知,就可以推算出另一条边长,这便是视距法测距的简单工作原理。 二、视距计算公式 (一)视准轴水平时的视距公式 如图,mn p =为视距丝间隔,MFN ∠为定角,F 为物镜前焦点,f 为焦距,s 为物镜离仪器中心的距离,'''N M t =为尺间隔,d ’为焦点到视距尺的距离,D ’为AB 之间的水平距离。 由图可以看出:MFN ?≌mFn ?,所以有: p f t d ='',即 ''t p f d ?= 因)(''s f d D ++=,故有 )(''s f t p f D ++?=。设 p f C =,s f Q +=,则上式改写为:Q t C D +?=''
C——视距乘常数。制造仪器时,一般将C设计为100。 Q——视距加常数。对于内调焦望远镜,其加常数接近于0,可忽略不计。 (二)视准轴倾斜时的视距公式 1、水平距离公式 若两点高差很大,则不可能用水平视线进行视距测量,必须把望远镜视准轴放在倾斜位置,如尺子仍竖直立着,则视准轴不与尺 面垂直,上面推导的公式就不 适用了。若要把视距尺与望远 镜视准轴垂直,那是办不到 的。因此在推导水平距离的公 式时,必须导入两项改正:(1) 对于视距尺不垂直于视准轴 的改正;(2)视线倾斜的改正。水平距离公式为: δ2 =D S其中:δ为竖角。 cos ? 2、高差公式 + ? =δ其中:i为仪器高,L为目标高。 h- i D L tg 三、视距法测距的作业方法 1、将经纬仪安置在测站上,对中、整平;
TDOA定位的Chan算法Matlab源码 (2009-07-26 12:47:49) 标签: 杂谈 TDOA定位的Chan算法Matlab源码 function [POS_ref,POS1,POS2,POS3,POS4] = TDOA_chan(R,Pbs,Q) %% TDOA定位定位Chan算法 % GreenSim团队原创作品,转载请注明 % Email:greensim@https://www.doczj.com/doc/fd157741.html, % GreenSim团队主页:https://www.doczj.com/doc/fd157741.html,/greensim % [color=red]欢迎访问GreenSim——算法仿真团队 →[url=https://www.doczj.com/doc/fd157741.html,/greensim]https://www.doczj.com/doc/fd157741.html,/gree nsim[/url][/color] %********************************************************* % CHAN算法,假设移动台与各基站位置较近,需进行三四WLS计算 % 输入参数: % R(N-1×1): TDOA测量值 % Pbs(N×2): 基站的坐标,第一列为X,第二列为Y;参考基站坐标位于第一行
% 输出参数: % POS_ref(2X1):第一次WLS的估计结果,作为参考作最终定位结果的判决 % POS1(2X1) :定位结果1 % POS2(2X1) :定位结果2 % POS3(2X1) :定位结果3 % POS4(2X1) :定位结果4 %%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%% %这段程序用于自己产生算法输入参数,用于算法测试 % delta = 10; %TDOA测量误差的标准差,用于产生Q矩阵 % M=4; %参考基站外的基站数量 % Xb = 20;Yb = 100; %参考的基站坐标 % X = zeros(M,2); % a = 2*pi/M; % for i=1:M %生成其他基站的坐标 % X(i,1) = 400*cos(a*(i-1)); % X(i,2) = 400*sin(a*(i-1)); % end % Xreal = -150;Yreal = 200;%移动台真实坐标 % %产生TDOA测量结果 % Rb = sqrt((Xreal - Xb)^2+(Yreal - Yb)^2);%移动台到基站的真实
用经纬仪测量视距及高差的步骤及方法 淮安供电公司市郊农电葛进进 一、三脚架架设操作步骤及方法 1、架设前,先把三脚架的三条腿拉出张开,三脚架的高度和测量者的下巴高度相等,然后钮紧。 2、对准被测物的方向,将三脚架有前支架支在标桩前向两脚处(约50cm),再把后两脚左右分开,使支架底盘中点能对准地面上的标桩,并尽量让三脚架的底座大概水平,然后将两脚支好。 3、三脚架架好后,打开经纬仪箱,左手抓住仪器支架,右手托住仪器底部,放在三脚架上,并使仪器架底座的方向与三脚架座的方向一致,旋上下面的旋钮。(注意:未旋上旋钮前,左手不能松开仪器) 1、经纬仪对中时,双手握住三脚架两面左右支架,前后左右移动,目光通过光学对中器(可以向外拉或旋转,来调节清楚)寻找中心桩,(可将脚放在中心桩处)进行对中。(中心桩在前向前移动,中心桩在后向后移动,中心桩在左向右移动,中心桩在右向左移动。) 2、光学对中器对准中心桩后,将三个支架用脚轻踩一下。 三、经纬仪整平的操作步骤及方法 1 2、粗整平:用微调整三角支架升降使仪器圆水准器的水泡调至居中;方法:可用精整平的方法,用长条水准管两次来调整圆水准器的水泡。 调整水平泡的技巧:如果水泡在水准器中心的左边,则三脚架螺旋逆时针转,如果在右边,则顺时针转。 3、精整平:精调调整仪器三脚螺旋旋钮,使横向水准管的水泡居中。 精调的方法: 第一步,仪器支架与前面两个三脚螺旋旋钮调致平行后,用两手同时向内或向外慢慢旋转前面两个三脚螺旋旋钮,使水准管水泡调到中央; 第二步,把仪器旋转90度。使仪器支架与第三个三脚螺旋旋钮在一直线上,调整第三个三脚螺旋旋钮,向内或向外慢慢旋转,使水准管水泡调到中央, 以上二步骤反复进行,直至横向水准管的水泡全部居中为止。 四、测量视距 1、对中、整平以后,把望远镜对向被测目标,旋转目镜调焦手轮(靠近眼的黑旋钮),使十字线清晰。 2、把望远镜上的光学瞄准器准星大致对准被测点,转动望远镜上望远镜调焦手轮(远离眼的银色旋钮)使被测点使远处测量物最清晰,并在十字线附近。 3、经纬仪瞄准目标后,锁紧水平制动手轮。再转动望远镜的水平微动旋钮(最下面侧过来的大银色旋钮)使望远镜中的十字线的中线靠近标尺。 4、旋紧度盘和望远镜上的制动螺旋(在正面靠近读数显微镜旁,三个最上面的小银色旋钮),再转动度盘和望远镜上的垂直微动旋钮(中间的黑皮旋钮)来调节中丝,让中丝大约对准备1.3米~1.5米, 5、打开右侧上面的采光镜,关下面的采光镜。 6、观看显微镜角度镜,如能看到说明角度垂直,如不垂直,则调整采光镜旋钮(左侧下面有白色横线的旋钮)到看到刻度盘清楚, 7、调整微调:先调整角度垂直手轮(左侧上面大的银色旋钮),使左、右两边的0对齐,
第四章→第二节→视距测量 一、视距测量的概念 视距测量是根据几何光学原理,利用仪器望远镜筒内的视距丝在标尺上截取读数,应用三角公式计算两点距离,可同时测定地面上两点间水平距离和高差的测量方法。视距测量的优点是,操作方便、观测快捷,一般不受地形影响。其缺点是,测量视距和高差的精度较低,测距相对误差约为1/200~1/300。尽管视距测量的精度较低,但还是能满足测量地形图碎部点的要求,所以在测绘地形图时,常采用视距测量的方法测量距离和高差。 二、视距测量的计算公式 (一)望远镜视线水平时测量平距和高差的计算公式 如图4-7 所示,测地面两点的水平距离和高差,在点安置仪器,在点竖立视距尺,当望远镜视线水平时,水平视线与标尺垂直,中丝读数为,上下视距丝在视距尺上的位置读数之差称为视距间隔,用表示。 1、水平距离计算公式 设仪器中心到物镜中心的距离为,物镜焦距为,物镜焦点到 点的距离为,由图4-7可知两点间的水平距离为,根据图中相似三角形成比例的关系得两点间水平距离为:
(4-7) 式中:为视距乘常数,用表示,其值在设计中为100。 为视距加常数,仪器设计为0。 则视线水平时水平距离公式: (4-8) 式中—视距乘常数其值等于100。 —视距间隔。 2、高差的计算公式: 两点间的高差由仪器高和中丝读数求得,即: (4-9) 式中:—仪器高,地面点至仪器横轴中心的高度。 (二)望远镜视线倾斜时测量平距和高差的公式 在地面起伏比较大的地区进行视距测量时,需要望远镜倾斜才能照准视距标尺读取读数,此时视准轴不垂直于视距标尺,不能用式4-8计算距离和高差。如图4-8所示,下面介绍视准轴倾斜时求水平距离和高差的计算公式。 视线倾斜时竖直角为,上下视距丝在视距标尺上所截的位置为,,视距间隔为,求算、两点间的水平距离。 首先将视距间隔换算成相当于视线垂直时的视距间隔之距离,按式4-8求出倾斜视线的距离′,其次利用倾斜视线的距离′
__________________________________________________ TDOA定位算法研究 院(系):专业: 学号:指导教师: 年月日毕业设计(论文)
__________________________________________________ 题目基于TDOA的 定位算法研究 专业 学号 学生 指导教师 答辩日期
__________________________________________________ 摘要 无线传感器网络可以看成是由数据获取网络、数据分布网络和控制管理中心三部分组成的。其主要组成部分是集成有传感器、数据处理单元和通信模块的节点, 各节点通过协议自组成一个分布式网络, 再将采集来的数据通过优化后经无线电波传输给信息处理中心。因此,其最重要的核心部位是节点传感器,应用的范围是面对广大使用用户和各种科技创新范围,其功能的关键所在是为用户提供可靠的、准确的、实时的研究数据。那么,定位技术作为将这个“核心”和“关键”连接的纽带,它的重要性不言而喻。 本文首先通过调查无线传感器网络的发展历程,然后再研究其能够实现的各种功能,结合国内外在其各个领域像组网方式等的研究现状,通过分析,在分析的过程当中选择研究方向,最后通过选择,在定位算法上得到了突破口,然后研究的后续内容得以展开。其次介绍了无线传感器的基础概念,分析其各个基本单元在其组成的网络当中的主要实现的功能,然后在其测距算法的类别中,介绍了三种经典算法理论,并同时与非测距算法对比,得出非测距算法的优越性,分析和研究目前已有的三种应用算法,最后整理出算法的改进方法。 通过对于TDOA定位查恩算法、TDOA定位最小二乘法算法以及TDOA定位最小二乘法加权算法来进行研究,按照提高精度的思路,最终在三种算法基础上尝试一种优化算法即进行质心处理的算法。然后用仿真软件matlab软件进行组网和仿真,并且最终通过matlab进行仿真并且得到成功的验证。然后大量的实验数据证明,通过质心加权处理的TDOA定位算法可以在实际中得到应用。 关键词:无线传感器网络;chan算法;TDOA;质心加权;锚节点
计算题库及参考答案 1、设A 点高程为15.023m ,欲测设设计高程为16.000m 的B 点,水准仪安置在A 、B 两点之间,读得A 尺读数a=2.340m ,B 尺读数b 为多少时,才能使尺底高程为B 点高程。 【解】水准仪的仪器高为=i H 15.023+2.23=17.363m ,则B 尺的后视读数应为 b=17.363-16=1.363m ,此时,B 尺零点的高程为16m 。 2、在1∶2000地形图上,量得一段距离d =23.2cm ,其测量中误差=d m ±0.1cm ,求该段距离的实地长度 D 及中误差D m 。 【解】==dM D 23.2×2000=464m ,==d D Mm m 2000×0.1=200cm=2m 。 3、已知图中AB 的坐标方位角,观测了图中四个水平角,试计算边长B →1,1→2,2→3, 3→4的坐标方位角。 【解】=1B α197°15′27″+90°29′25″-180°=107°44′52″ =12α107°44′52″+106°16′32″-180°=34°01′24″ =23α34°01′24″+270°52′48″-180°=124°54′12″ =34α124°54′12″+299°35′46″ -180°=244°29′58″ 4、在同一观测条件下,对某水平角观测了五测回,观测值分别为:39°40′30″,39°40′48″,39°40′54″,39°40′42″,39°40′36″,试计算: ① 该角的算术平均值——39°40′42″; ② 一测回水平角观测中误差——±9.487″; ③ 五测回算术平均值的中误差——±4.243″。 5、在一个直角三角形中,独立丈量了两条直角边a ,b ,其中误差均为m ,试推导由a ,b 边计算所得斜边c 的中误差c m 的公式? 【解】斜边c 的计算公式为22b a c += ,全微分得 db c b da c a bdb b a ada b a d c +=+++=--2)(212)(21212 22122 应用误差传播定律得2 22 222222222m m c b a m c b m c a m c =+=+= 6、已知=AB α89°12′01″,=B x 3065.347m ,=B y 2135.265m ,坐标推算路线为B →1→2,测得坐标推算路线的右角分别为=B β32°30′12″,=1β261°06′16″,水平距离分别为=1B D 123.704m ,=12D 98.506m ,试计算1,2点的平面坐标。 【解】 1) 推算坐标方位角 =1B α89°12′01″-32°30′12″+180°=236°41′49″ =12α236°41′49″-261°06′16″+180°=155°35′33″ 2) 计算坐标增量 =?1B x 123.704×cos236°41′49″=-67.922m , =?1B y 123.704×sin236°41′49″=-103.389m 。 =?12x 98.506×cos155°35′33″=-89.702m , =?12y 98.506×sin155°35′33″=40.705m 。 3) 计算1,2点的平面坐标 图 推算支导线的坐标方位角
仪器水准仪水准尺观测者 日期2012.6.24 记录者 视距测量记录 测站:A 测站高程:仪器高: 照准点号下丝读数 上丝读数 视距间隔 中丝读数 l 竖盘读数 L 垂直角 α 水平距 离 D 高差 h 高程 H I 2349 2500 2°8’40”30.16 2651 302 B 2354 2500 2°28’50”29.54 2650 296 测站:B 测站高程:仪器高: 照准点号下丝读数 上丝读数 视距间隔 中丝读数 l 竖盘读数 L 垂直角 α 水平距 离 D 高差 h 高程 H A 2353 2500 1°7’30”29.59 2649 296 C 2319 2500 1°54’27”34.06 2660 341 班级小组三姓名 11工管测量实习
仪器水准尺观测者 日期记录者 视距测量记录 测站:C 测站高程:仪器高: 照准点号下丝读数 上丝读数 视距间隔 中丝读数 l 竖盘读数 L 垂直角 α 水平距 离 D 高差 h 高程 H B 2320 2500 1°47’20”34.27 2663 343 D 2417 2500 3°6’50”16.95 2587 170 测站:D 测站高程:仪器高: 照准点号下丝读数 上丝读数 视距间隔 中丝读数 l 竖盘读数 L 垂直角 α 水平距 离 D 高差 h 高程 H C 2408 2500 3°57’30”17.11 2580 172 E 2380 2500 2°36’40”22.85 2609 229 班级小组姓名
仪器水准尺观测者 日期记录者 视距测量记录 测站:E 测站高程:仪器高: 照准点号下丝读数 上丝读数 视距间隔 中丝读数 l 竖盘读数 L 垂直角 α 水平距 离 D 高差 h 高程 H D 2381 2500 2°6’16”22.75 2609 228 F 2399 2500 2°15’20”20.17 2601 202 测站:F 测站高程:仪器高: 照准点号下丝读数 上丝读数 视距间隔 中丝读数 l 竖盘读数 L 垂直角 α 水平距 离 D 高差 h 高程 H E 2401 2500 2°9’00”19.97 2601 200 G 2320 2500 1°47’30”35.77 2678 358 班级小组姓名
工程测量A第一次作业 二、主观题(共20道小题) 11.已知水准点5的高程为531.272米,四次测量隧道洞内各点高程的过程和尺读数如下图所示(测洞顶时,水准尺倒置),试求1、2、3、4点的高程。 12. 水准测量中,为什么一般要求前后视距尽量相等? 答:因为保持前后视距相等,可以消除仪器角的影响,并尽可能地消减地球曲率和大气折光的影响。 13. 经纬仪上有几对制动、微动螺旋?它们各起什么作用?如何正确使用它? 答:(1)经纬仪上有两对制动、微动螺旋,分别是照准部制动与微动螺旋和望远镜制动与微动螺旋。(2)照准部制动、微动螺旋一般是控制水平方向的精确照准,望远镜制动、微动螺旋一般是控制竖直方向的精确照准。(3)两者在使用时,先松开制动螺旋,粗略照准目标,再关紧制动螺旋后,用微动螺旋进行精确照准目标。 测站竖盘位 置目 标 水平度盘读 数 半测回角 值 一测回角 值 草图 0 盘左 A 130°8.1′ A 0 B B 190°15.4′ 盘右 B 10°16.3′
A 310°8.7′ 15.相邻两导线点坐标之差称坐标增量。 16.高程控制测量的主要方法有水准测量和三角高程测量。 17.已知边长和坐标方位角,求坐标增量的计算称为坐标正算。 18.根据表中所列数据,试进行附合导线角度闭合差的计算和调整,并计算各边的坐标方位角。参考答案:主观题答案暂不公布,请先自行离线完成。 19. 相邻两等高线高程之差称为高差。 20. 地面的高低变化和起伏形状称为地貌。 21. 测定碎部点平面位置的基本方法有极坐标法、直角坐标法、角度交会法 22. 象限角的取值范围是:大于等于0度且小于等于90度(或[0°, 90°])。 23. 地形图符号按照比例尺可分为比例符号、非比例符号和半依比例符号。 24. 水准测量时对前后视距的要求是尽可能相等。 25. 经纬仪进行测量前的安置工作包括对中和整平两个主要步骤。 26. 测量的基本工作为测量角度、测距和测高差。 19. 相邻两等高线高程之差称为高差 20.地面的高低变化和起伏形状称为 21.测定碎部点平面位置的基本方法有 22.象限角的取值范围是:。 23.地形图符号按照比例尺可分为比例符号、________________和半依比例符号。 24.水准测量时对前后视距的要求是。 25.经纬仪进行测量前的安置工作包括对中和____________两个主要步骤。