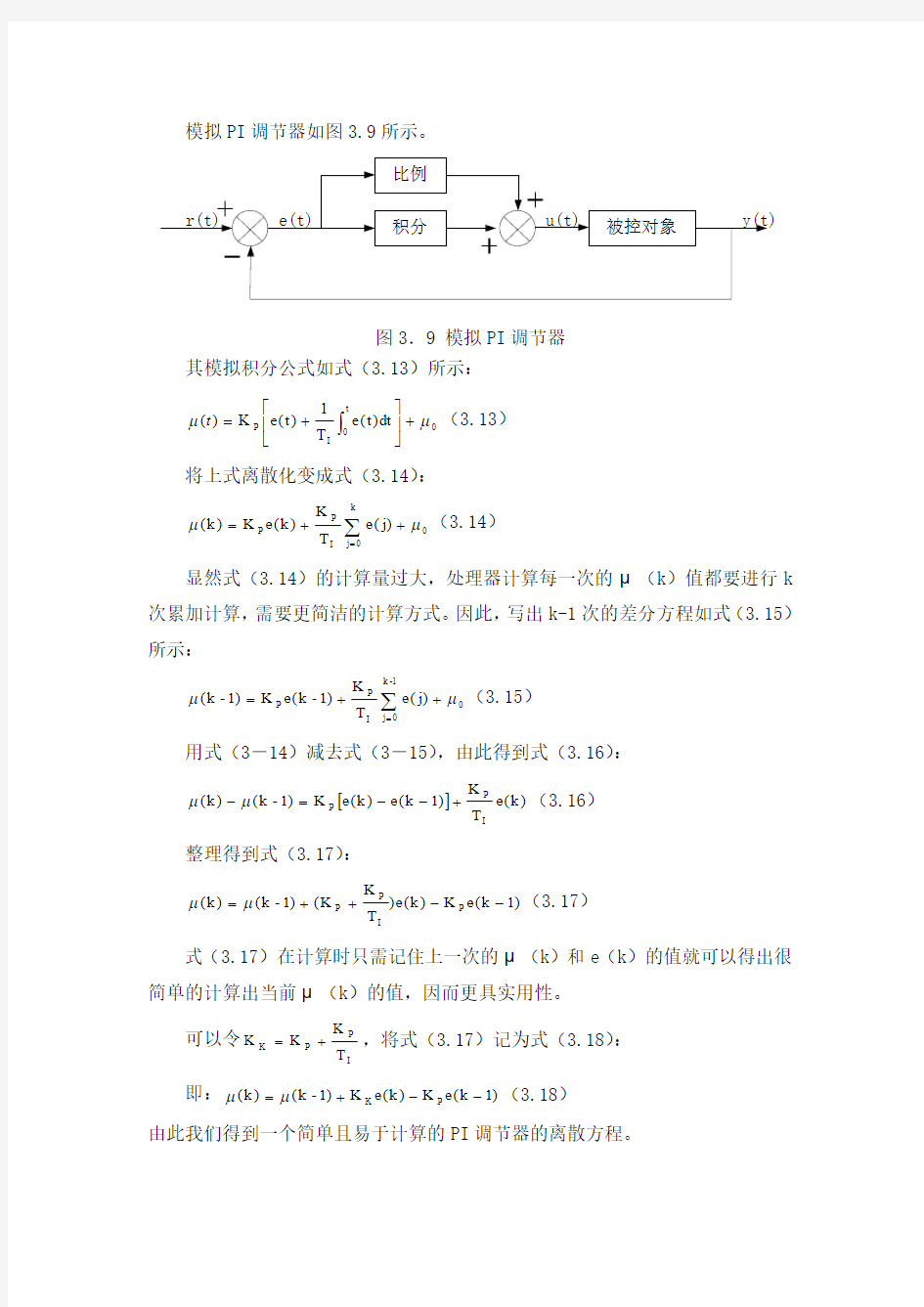
模拟PI 调节器如图3.9所示。 比例积分被控对象r(t)e(t)u(t)y(t)
图3.9 模拟PI 调节器
其模拟积分公式如式(3.13)所示:
0t 0I P dt )t (e T 1)t (e K )(μμ+??????+
=?t (3.13)
将上式离散化变成式(3.14):
0k 0
j I P P )j (e T K )k (e K )k (μμ++=∑=(3.14) 显然式(3.14)的计算量过大,处理器计算每一次的μ(k )值都要进行k 次累加计算,需要更简洁的计算方式。因此,写出k-1次的差分方程如式(3.15)所示:
01-k 0
j I P P )j (e T K )1-k (e K )1-k (μμ++=∑=(3.15) 用式(3-14)减去式(3-15),由此得到式(3.16):
[])k (e T K )1k (e )k (e K )1-k ()k (I P P +--=-μμ(3.16)
整理得到式(3.17):
)1k (e K )k (e )T K K ()1-k ()k (P I P P --++=μμ(3.17)
式(3.17)在计算时只需记住上一次的μ(k )和e (k )的值就可以得出很简单的计算出当前μ(k )的值,因而更具实用性。
可以令I P P K T K K K +=,将式(3.17)记为式(3.18):
即:)1k (e K )k (e K )1-k ()k (P K --+=μμ(3.18)
由此我们得到一个简单且易于计算的PI 调节器的离散方程。
离散数学考试(试题及答案) 一、(10分)某项工作需要派A、B、C和D4个人中的2个人去完成,按下面3个条件,有几种派法?如何派? (1)若A去,则C和D中要去1个人; (2)B和C不能都去; (3)若C去,则D留下。 解设A:A去工作;B:B去工作;C:C去工作;D:D去工作。则根据题意应有:ACD,(B∧C),CD必须同时成立。因此 (ACD)∧(B∧C)∧(CD) (A∨(C∧ D)∨(C∧D))∧(B∨C)∧(C∨D) (A∨(C∧ D)∨(C∧D))∧((B∧C)∨(B∧D)∨C∨(C∧D)) (A∧B∧C)∨(A∧B∧D)∨(A∧C)∨(A∧C∧D) ∨(C∧D∧B∧C)∨(C∧D∧B∧D)∨(C∧D∧C)∨(C∧ D∧C∧D) ∨(C∧D∧B∧C)∨(C∧D∧B∧D)∨(C∧D∧C)∨(C∧D F∨F∨(A∧C)∨F∨F∨(C∧ D∧B)∨F∨F∨(C∧D∧B)∨F∨(C∧D)∨F (A∧C)∨(B∧C∧ D)∨(C∧D∧B)∨(C∧D) (A∧C)∨(B∧C∧ D)∨(C∧D) T 故有三种派法:B∧D,A∧C,A∧D。 二、(15分)在谓词逻辑中构造下面推理的证明:某学术会议的每个成员都是专家并且是工人,有些成员是青年人,所以,有些成员是青年专家。 解:论域:所有人的集合。():是专家;():是工人;():是青年人;则推理化形式为: (()∧()),()(()∧())
下面给出证明: (1)() P (2)(c) T(1),ES (3)(()∧()) P (4)( c)∧( c) T(3),US (5)( c) T(4),I (6)( c)∧(c) T(2)(5),I (7)(()∧()) T(6) ,EG 三、(10分)设A、B和C是三个集合,则AB(BA)。 证明:ABx(x∈A→x∈B)∧x(x∈B∧xA)x(xA∨x∈B)∧x(x∈B∧xA) x(x∈A∧xB)∧x(xB∨x∈A)x(x∈A∧xB)∨x(x∈A∨xB) (x(x∈A∧xB)∧x(x∈A∨xB))(x(x∈A∧xB)∧x(x∈B→x∈A)) (BA)。 四、(15分)设A={1,2,3,4,5},R是A上的二元关系,且R={<2,1>,<2,5>,<2,4>,<3,4>,<4,4>,<5,2>},求r(R)、s(R)和t(R)。 解 r(R)=R∪I A={<2,1>,<2,5>,<2,4>,<3,4>,<4,4>,<5,2>,<1,1>,<2,2>,<3,3>,<4,4>,<5,5>} s(R)=R∪R-1={<2,1>,<2,5>,<2,4>,<3,4>,<4,4>, <5,2>,<1,2>,<4,2>,<4,3>} R2={<2,2>,<2,4>,<3,4>,<4,4>,<5,1>,<5,5>,<5,4>} R3={<2,1>,<2,5>,<2,4>,<3,4>,<4,4>,<5,2>,<5,4>} R4={<2,2>,<2,4>,<3,4>,<4,4>,<5,1>,<5,5>,<5,4>}=R2 t(R)=R i={<2,1>,<2,5>,<2,4>,<3,4>,<4,4>,<5,2>,<2,2>,<5,1>,<5,4>,<5,5>}。
1 离散数学模拟试题Ⅰ 一、单项选择题(本大题共15小题,每题1分,共15分)在每小题列出的四个备选项中只有一个就是符合题目要求的,请将其代码填写在题后的括号内。错选、多选或未选均无分 1.设 }16{2<=x x x A 是整数且,下面哪个命题为假( A )。 A 、A ?}4,2,1,0{; B 、A ?---}1,2,3{; C 、A ?Φ; D 、A x x x ?<}4{是整数且。 2.设}}{,{,ΦΦ=Φ=B A ,则B -A 就是( C )。 A 、}}{{Φ; B 、}{Φ; C 、}}{,{ΦΦ; D 、Φ。 3.右图描述的偏序集中,子集},,{f e b 的上界为 ( B )。 A 、b,c; B 、a,b; C 、b; D 、a,b,c 。 4.设f 与g 都就是X 上的双射函数,则1)(-g f ο为( C )。 A 、11--g f ο; B 、1)(-f g ο; C 、11--f g ο; D 、1-f g ο。 5.下面集合( B )关于减法运算就是封闭的。 A 、N ; B 、}2{I x x ∈; C 、}12{I x x ∈+; D 、}{是质数x x 。 6.具有如下定义的代数系统>*<,G ,( D )不构成群。 A 、G={1,10},*就是模11乘 ; B 、G={1,3,4,5,9},*就是模11乘 ; C 、G=Q(有理数集),*就是普通加法; D 、G=Q(有理数集),*就是普通乘法。 7.设 },32{I n m G n m ∈?=,*为普通乘法。则代数系统>*<,G 的幺元为( B )。 f
2 A 、不存在 ; B 、0032?=e ; C 、32?=e ; D 、1132--?=e 。 8.下面集合( C )关于整除关系构成格。 A 、{2,3,6,12,24,36} ; B 、{1,2,3,4,6,8,12} ; C 、{1,2,3,5,6,15,30} ; D 、{3,6,9,12}。 9.设},,,,,{f e d c b a V =, },,,,,,,,,,,{><><><><><><=e f e d d a a c c b b a E ,则有向图 >= 北京语言大学网络教育学院 《离散数学》模拟试卷一 注意: 1.试卷保密,考生不得将试卷带出考场或撕页,否则成绩作废。请监考老师负责监督。 2.请各位考生注意考试纪律,考试作弊全部成绩以零分计算。 3.本试卷满分100分,答题时间为90分钟。 4.本试卷分为试题卷和答题卷,所有答案必须答在答题卷上,答在试题卷上不给分。 一、【单项选择题】(本大题共15小题,每小题3分,共45分)在每小题列出的四个选项中只有一个选项是符合题目要求的,请将正确选项前的字母填在答题卷相应题号处。 1、在由3个元素组成的集合上,可以有 ( ) 种不同的关系。 [A] 3 [B] 8 [C]9 [D]27 2、设{}{}1,2,3,5,8,1,2,5,7A B A B ==-=,则( )。 [A] 3,8 [B]{}3 [C]{}8 [D]{}3,8 3、若X 是Y 的子集,则一定有( )。 [A]X 不属于Y [B]X ∈Y [C]X 真包含于 Y [D]X∩Y=X 4、下列关系中是等价关系的是( )。 [A]不等关系 [B]空关系 [C]全关系 [D]偏序关系 5、对于一个从集合A 到集合B 的映射,下列表述中错误的是( )。 [A]对A 的每个元素都要有象 [B] 对A 的每个元素都只有一个象 [C]对B 的每个元素都有原象 [D] 对B 的元素可以有不止一个原象 6、设p:小李努力学习,q:小李取得好成绩,命题“除非小李努力学习,否则他不能取得好成绩”的符号化形式为( )。 [A]p→q [B]q→p [C]┐q→┐p [D]┐p→q 7、设A={a,b,c},则A 到A 的双射共有( )。 [A]3个 [B]6个 [C]8个 [D]9个 目录 第一章 模拟化设计基础 数字控制系统的设计有两条道路,一是模拟化设计,一是直接数字设计。如果已经有成熟的模拟控制器,可以节省很多时间和部分试验费用,只要将模拟控制器离散化即可投入应用。如果模拟控制器还不存在,可以利用已有的模拟系统的设计经验,先设计出模拟控制器,再进行离散化。 将模拟控制器离散化,如果用手工进行,计算量比较大。借助数学软件MATLAB 控制工具箱,可以轻松地完成所需要的全部计算步骤。如果需要的话,还可以使用MATLAB 的SIMULINK 工具箱,进行模拟仿真。 第一节 步骤 步骤1 模拟控制器的处理 在数字控制系统中,总是有传输特性为零阶保持器的数模转换器(DAC ),因此,如果模拟控制器尚未设计,则应以下 图的方式设计模拟控制器,即在对象前面加上一个零阶保持器,形成一个新对象Ts 1e G s s ()--,然后针对这个新对象求模拟 控制器D(s)。事实上,模拟控制器一般是已经设计好的,无法或不方便更改了,离散化后的系统只好作为近似设计了。 然而,按照上述思路,可否将已有的控制器除以一个零阶保持器再离散化呢?还没有这方面的实际经验。 以下假设选定的G(s),D(s)如下图,而且不对G(s)作添加保持器的预处理。 步骤2 离散化模拟控制器 离散化模拟控制器之前,先要确定离散化算法和采样时间。离散化算法有好几种,第二章中有详细的论述,现假定采用双线性变换法。确定采样时间,需要考虑被控对象的特性,计算机的性能,以及干扰信号的影响等,初步可按采样时间T<,Tp 为被控对象时间常数,或T=~τ,为被控对象的纯滞后,初步确定后再综合平衡其它因素,当然这需要一定的经验,现在假定取秒。 假设模拟控制器为s 2 D s 8s 15 +=?+(),在MATLAB 中,用c2d 函数进行离散化,过程为: 转换结果为: 步骤3 检验数字控制器的性能 数字控制器的性能项目比较多,我们仅以直流增益,频率特性,零极点分布说明。 直流增益 dcgain(dz) 返回直流增益 频率特性 bode(ds,'r',dz,'g') 伯德图,见下页左图 零极点分布 pzmap(dz) 零极点分布图,见下页右图 步骤4 离散化控制对象 为了进行模拟仿真,需要对控制对象进行离散化,由于步骤1所说的原因,应把被控对象视为零阶保持器与原对象的串连,即应对 Ts 1e G s s ()--进行离散化,这时可在c2d 函数中使用零阶保持器(zoh)方法,如果认为不需要添加零阶保持器,即直接对G(s)离散化,则应在c2d 函数中使用冲击响应不变法(imp )。 借用零阶保持器(zoh)方法,将对象20 G s s s 2()() =+带一阶保持器离散化的过程如下: 转换结果为: 步骤5 模拟仿真 求离散系统的闭环传递函数和连续系统的闭环传递函数。 ds=zpk(-2,-15,8) %建立模拟控制器的s 传递函数 dz=c2d(ds,,'tustin') %将模拟控制器按tustin 方法转换为z 传递函数的数字控制器 ...... %模拟控制器D(s)转换为D(z)的过程见前 gs=zpk([ ],[0,-2],20) %建立对象的s 传递函数 g1z=c2d(gs,,'zoh') %借用c2d 函数进行带零阶保持器的对象的离散化 PI 调节器是一种线性控制器,它根据给定值)(t r 与实际输出值)(t c 构成控制偏差 )()()(t c t r t e -= (3.58) 将偏差的比例(P )和积分(I )通过线性组合构成控制量,对被控对象进行控制,其控制规律为 ])(1)([)(0 ? + =t I p dt t e T t e K t u (3.59) 其中)(t u 为PI 控制器的输出,)(t e 为PI 调节器的输入,p K 为比例系数,I T 为积分时间常数。 简单说来,PI 控制器各校正环节的作用如下: 1.比例环节 即时成比例的反映控制系统的偏差信号)(t e ,偏差一旦产生, 控制器立即产生控制作用,以减少偏差。通常随着p K 值的加大,闭环系统的超调量加大,系统响应速度加快,但是当p K 增加到一定程度,系统会变得不稳定。 2.积分环节 主要用于消除静差,提高系统的无差度。积分作用的强弱取 决于积分常数I T ,I T 越大,积分作用越弱,反之越强。通常在p K 不变的情况下,I T 越大,即积分作用越弱,闭环系统的超调量越小,系统的响应速度变慢。 由于DSP 的控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量,因此必须对上式进行离散化处理,用一系列采样时刻点k 代表连续的时间t ,离散的PI 控制算法表达式为: ∑∑==+= + =k j i p k j I s p j e K k e K j e T T k e K k u 0 ) ()(])()([)( (3.60) 其中k =0,1,2……表示采样序列,)(k u 表示第k 次采样时刻PI 调节器的输出值,)(k e 表示第k 次采样时刻输入的偏差值,s T 表示采样周期,p K 为比例系数, i K 为积分系数。 数字PI 调节器可以分为位置式PI 控制算法和增量式PI 控制算法。如式(3.60)所表示的计算方法就是位置式PI 控制算法,PI 调节器的输出直接控制执行机构。这种算法的优点是计算精度比较高,缺点是每次都要对)(k e 进行累加,很容易出现积分饱和的情况,由于位置式PI 调节器直接控制的是执行机构,积分一旦饱和就会引起执行机构位置的大幅度变化,造成控制对象的不稳定。增量式PI 控制算法是在式(3.60)的基础上做了一些修改。根据式(3.60)可得 ∑-=+-=-1 )()1()1(k j i p j e K k e K k u (3.61) 由式(3.60),式(3.61)可得 《离散数学》模拟试题 一、 填空题(每小题2分,共20分) 1. 已知集合A ={φ,1,2},则A 得幂集合p (A )=_____ _。 2. 设集合E ={a , b , c , d , e }, A = {a , b , c }, B = {a , d , e }, 则A ∪B =___ ___, A ∩ B =____ __,A -B =___ ___,~A ∩~B =____ ____。 3. 设A ,B 是两个集合,其中A = {1, 2, 3}, B = {1, 2},则A -B =____ ___, ρ(A )-ρ(B )=_____ _ _。 4. 已知命题公式,则G 的析取范式为 。 5. 设P :2+2=4,Q :3是奇数;将命题“2+2=4,当且仅当3是奇数。”符号化 ,其真值为 。 二、单项选择题(选择一个正确答案的代号填入括号中,每小题4分,共16分。) 1. 设A 、B 是两个集合,A ={1,3,4},B ={1,2},则A -B 为( ). A. {1} B. {1, 3} C. {3,4} D. {1,2} 2. 下列式子中正确的有( )。 A. φ=0 B. φ∈{φ} C. φ∈{a,b} D. φ∈φ 3. 设集合X ={x , y },则ρ(X )=( )。 A. {{x },{y }} B. {φ,{x },{y }} C. {φ,{x },{y },{x , y }} D. {{x },{y },{x , y }} 4. 设集合 A ={1,2,3},A 上的关系 R = {(1,1),(2,2),(2,3),(3,3),(3,2)}, 则R 不具备( ). 三、计算题(共50分) R Q P G →∧?=)( 东南大学自动化学院 实验报告 课程名称:计算机控制技术 第 2 次实验 实验名称:实验三离散化方法研究 院(系):自动化学院专业:自动化 姓名:学号: 实验室:416 实验组别: 同组人员:实验时间:2014年4月10日评定成绩:审阅教师: 一、实验目的 1.学习并掌握数字控制器的设计方法(按模拟系统设计方法与按离散设计方法); 2.熟悉将模拟控制器D(S)离散为数字控制器的原理与方法(按模拟系统设计方法); 3.通过数模混合实验,对D(S)的多种离散化方法作比较研究,并对D(S)离散化前后闭环系统的性能进行比较,以加深对计算机控制系统的理解。 二、实验设备 1.THBDC-1型 控制理论·计算机控制技术实验平台 2.PCI-1711数据采集卡一块 3.PC 机1台(安装软件“VC++”及“THJK_Server ”) 三、实验原理 由于计算机的发展,计算机及其相应的信号变换装置(A/D 和D/A )取代了常规的模拟控制。在对原有的连续控制系统进行改造时,最方便的办法是将原来的模拟控制器离散化。在介绍设计方法之前,首先应该分析计算机控制系统的特点。图3-1为计算机控制系统的原理框图。 图3-1 计算机控制系统原理框图 由图3-1可见,从虚线I 向左看,数字计算机的作用是一个数字控制器,其输入量和输出量都是离散的数字量,所以,这一系统具有离散系统的特性,分析的工具是z 变换。由虚线II 向右看,被控对象的输入和输出都是模拟量,所以该系统是连续变化的模拟系统,可以用拉氏变换进行分析。通过上面的分析可知,计算机控制系统实际上是一个混合系统,既可以在一定条件下近似地把它看成模拟系统,用连续变化的模拟系统的分析工具进行动态分析和设计,再将设计结果转变成数字计算机的控制算法。也可以把计算机控制系统经过适当变换,变成纯粹的离散系统,用z 变化等工具进行分析设计,直接设计出控制算法。 按模拟系统设计方法进行设计的基本思想是,当采样系统的采样频率足够高时,采样系统的特性接近于连续变化的模拟系统,此时忽略采样开关和保持器,将整个系统看成是连续变化的模拟系统,用s 域的方法设计校正装置D(s),再用s 域到z 域的离散化方法求得离散传递函数D(z)。为了校验计算结果是否满足系统要求,求得D(z)后可把整个系统闭合而成离散的闭环系统。用z 域分析法对系统的动态特性进行最终的检验,离散后的D(z)对D(s)的逼真度既取决于采样频率,也取决于所用的离散化方法。离散化方法虽然有许多,但各种离散化方法有一共同的特点:采样速率低,D(z)的精度和逼真度越低,系统的动态特性与预 数 字 计算机 D/A A/D 模 拟 控制对象 R Y I II PI 控制原理 1.1 比例(P )控制 比例控制是一种最简单的控制方式。其控制器实质上是一个具有可调增益的放大器。在信号变换过程中,P 控制器值改变信号的增益而不影响其相位。在串联校正中,加大了控制器增益k ,可以提高系统的开环增益,减小的系统稳态误差,从而提高系统的控制精度。控制器结构如图1: 图1 1.2 比例-微分控制 具有比例-微分控制规律的控制器称PI 控制器,其输出信号m(t)同时成比例的反应出输入信号e(t)及其积分,即: ?+=t i dt t e T k t ke t m 0)()()( (1) 式(1)中,k 为可调比例系数;i T 为可调积分时间常数。PI 控制器如图2所示。 图2 在串联校正时,PI 控制器相当于在系统中增加了一个位于原点的开环极点,同时也增加了一个位于s 左半平面的开环零点。位于原点的极点可以提高系统的型别,以消除或减小系统的稳态误差,改善系统的稳态性能;而增加的负实零点则用来减小系统的阻尼程度,缓和PI 控制器极点对系统稳定性及动态性能产生的不利影响。只要积分时间常数i T 足够大,PI 控制器对系统稳定性的不利影响可大为减弱,在控制工程中,PI 控制器主要用来改善控制系统的稳态性能。 k r(t) - c(s) e(t) m(t) ) 11(s T k i +R(s) - C(s) E(s) M(s) 2 P 和PI 控制参数设计 2.1 初始条件: 反馈系统方框图如图3所示。K (s)D =1(比例P 控制律),s K K (s)D I + =2(比例积分PI 控制律),)6s )(1s (1s G 1+-+= s (s),) 2s )(1s (1 G 2++=(s) 2.2 P 控制器设计 2.2.1 比例系数k 的设定 由题目给出的初始条件知,当G(s)=(s)1G ,未加入D(s )校正环节时,系统开环传递函数为: 6)1)(s -s(s 1 s (s)H(s)++= G s s s 651 s 23-++= (2) 又系统结构图可知系统为单位负反馈系统所以闭环传递函数为: )6)(1(11) 6)(1(1 )(+-+++-+= s s s s s s s s s φ 1551 23 +-++=s s s s (3) 则系统的闭环特征方程为:D(s)=1552 3+-+s s s =0. 按劳斯判据可列出劳斯表如表1: )s (D G(s) R Y e + - 图3 离散数学考试试题(A卷及答案) 一、证明题(10分) 1) (P∧Q∧A C)∧(A P∨Q∨C ) (A∧(P Q ))C。P<->Q=(p->Q)合取(Q->p) 证明: (P∧Q∧A C)∧(A P∨Q∨C) (P ∨Q ∨A∨C)∧(A∨P∨Q∨C) ((P ∨Q ∨A)∧(A∨P∨Q))∨C反用分配律 ((P∧Q∧A)∨(A ∧P ∧Q))∨C ( A∧((P∧Q)∨(P ∧Q)))∨C再反用分配律 GAGGAGAGGAFFFFAFAF ( A∧(P Q))∨C (A∧(P Q ))C 2) (P Q)P Q。 证明:(P Q)((P∧Q))(P ∨Q))P Q。 二、分别用真值表法和公式法求(P(Q∨R))∧(P∨(Q R))的主析取范式与主合取范式,并写出其相应的成真赋值和成假赋值(15分)。 主析取范式与析取范式的区别:主析取范式里每个括号里都必须有全部的变元。 主析取范式可由析取范式经等值演算法算得。 GAGGAGAGGAFFFFAFAF 证明: 公式法:因为(P(Q ∨R))∧(P∨(Q R)) (P∨Q∨R)∧(P∨(Q ∧R )∨(Q ∧R)) (P∨Q ∨R)∧(((P∨Q)∧(P ∨R ))∨(Q ∧R ))分配律 (P∨Q∨R)∧(P∨Q ∨Q)∧(P∨Q ∨R)∧(P∨R ∨Q)∧(P∨R ∨R) (P∨Q ∨R)∧(P∨Q ∨R )∧(P ∨Q∨R) M∧5M∧6M使(非P析取Q析取R)为0 4 GAGGAGAGGAFFFFAFAF 所赋真值,即100,二进制为4 GAGGAGAGGAFFFFAFAF 《离散数学》试卷(A 卷) 一、 选择题(共5 小题,每题 3 分,共15 分) 1、设A={1,2,3},B={2,3,4,5},C={2,3},则C B A ⊕?)(为(C )。 A 、{1,2} B 、{2,3} C 、{1,4,5} D 、{1,2,3} 2、下列语句中哪个是真命题 ( A ) A 、如果1+2=3,则4+5=9; B 、1+2=3当且仅当4+5≠9。 C 、如果1+2=3,则4+5≠9; D 、1+2=3仅当4+5≠9。 3、个体域为整数集合时,下列公式( C )不是命题。 A 、)*(y y x y x =?? B 、)4*(=??y x y x C 、)*(x y x x =? D 、)2*(=??y x y x 4、全域关系A E 不具有下列哪个性质( B )。 A 、自反性 B 、反自反性 C 、对称性 D 、传递性 5、函数612)(,:+-=→x x f R R f 是( D )。 A 、单射函数 B 、满射函数 C 、既不单射也不满射 D 、双射函数 二、填充题(共 5 小题,每题 3 分,共15 分) 1、设|A|=4,|P(B)|=32,|P(A ?B)|=128,则|A ?B|=??2???. 2、公式)(Q P Q ?∨∧的主合取范式为 。 3、对于公式))()((x Q x P x ∨?,其中)(x P :x=1, )(x Q :x=2,当论域为{0,1,2}时,其真值为???1???。 4、设A ={1,2,3,4},则A 上共有???15????个等价关系。 5、设A ={a ,b ,c },B={1,2},则|B A |= 8 。 三、判断题(对的填T ,错的填F ,共 10 小题,每题 1 分,共计10 分) 1、“这个语句是真的”是真命题。 ( F ) 2、“张刚和小强是同桌。”是复合命题。 ( F ) 3、))(()(r q q p p ∧?∧→?∨是矛盾式。 ( T ) 4、)(T S R T R S R ??????。 ( F ) 5、恒等关系具有自反性,对称性,反对称性,传递性。 ( T ) 6、若f 、g 分别是单射,则g f ?是单射。 ( T ) 7、若g f ?是满射,则g 是满射。 ( F ) 8、若A B ?,则)()(A P B P ?。 ( T ) 9、若R 具有自反性,则1-R 也具有自反性。 ( T ) 10、B A ∈并且B A ?不可以同时成立。 (F ) 四、计算题(共 3 小题,每题 10 分,共30 分) 1、调查260个大学生,获得如下数据:64人选修数学课程,94人选修计算机课程,58人选修商贸课程,28人同时选修数学课程和商贸课程,26人同时选修数学课程和计算机课程,22人同时选修计算机课程和商贸课程,14人同时选修三门课程。问 (1)三门课程都不选的学生有多少? (2)只选修计算机课程的学生有多少? 北京语言大学网络教育学院 《离散数学》模拟试卷一 注意: 1.试卷保密,考生不得将试卷带出考场或撕页,否则成绩作废。请监考老师负责监督。 2.请各位考生注意考试纪律,考试作弊全部成绩以零分计算。 3.本试卷满分100分,答题时间为90分钟。 4.本试卷分为试题卷和答题卷,所有答案必须答在答题卷上,答在试题卷上不给分。 一、【单项选择题】(本大题共15小题,每小题3分,共45分)在每小题列出的四个选项中只有一个选项是符合题目要求的,请将正确选项前的字母填在答题卷相应题号处。 1、在由3个元素组成的集合上,可以有 ( ) 种不同的关系。 [A] 3 [B] 8 [C]9 [D]27 2、设{}{}1,2,3,5,8,1,2,5,7A B A B ==-=,则( )。 [A] 3,8 [B]{}3 [C]{}8 [D]{}3,8 3、若X 是Y 的子集,则一定有( )。 [A]X 不属于Y [B]X ∈Y [C]X 真包含于 Y [D]X∩Y=X 4、下列关系中是等价关系的是( )。 [A]不等关系 [B]空关系 [C]全关系 [D]偏序关系 5、对于一个从集合A 到集合B 的映射,下列表述中错误的是( )。 [A]对A 的每个元素都要有象 [B] 对A 的每个元素都只有一个象 [C]对B 的每个元素都有原象 [D] 对B 的元素可以有不止一个原象 6、设p:小李努力学习,q:小李取得好成绩,命题“除非小李努力学习,否则他不能取得好成绩”的符号化形式为( )。 [A]p→q [B]q→p [C]┐q→┐p [D]┐p→q 7、设A={a,b,c},则A 到A 的双射共有( )。 [A]3个 [B]6个 [C]8个 [D]9个 8、一个连通图G 具有以下何种条件时,能一笔画出:即从某结点出发,经过图中每边仅一次回到该结点( )。 [A] G 没有奇数度结点 [B] G 有1个奇数度结点 [C] G 有2个奇数度结点 [D] G 没有或有2个奇数度结点 9、设〈G,*〉是群,且|G|>1,则下列命题不成立的是( )。 [A] G 中有幺元 [B] G 中么元是唯一的 [C] G 中任一元素有逆元 [D] G 中除了幺元外无其他幂等元 10、令p :今天下雪了,q :路滑,则命题“虽然今天下雪了,但是路不滑”可符号化为( ) [A] p →┐q [B] p ∨┐q [C] p ∧q [D] p ∧┐q 11、设图G= 比例(P)控制 比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。 积分(I)控制 在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进 一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。 微分(D)控制 在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能 够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。 5、PID控制器的参数整定 PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID 控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采 一.判断题(共10小题,每题1分,共10分) 在各题末尾的括号内画 表示正确,画 表示错误: 1.设p、q为任意命题公式,则(p∧q)∨p ? p ( ) 2.?x(F(y)→G(x)) ? F(y)→?xG(x)。( ) 3.初级回路一定是简单回路。( ) 4.自然映射是双射。( ) 5.对于给定的集合及其上的二元运算,可逆元素的逆元是唯一的。( ) 6.群的运算是可交换的。( ) 7.自然数集关于数的加法和乘法 列为。 19.n阶无向简单连通图G的生成树有条边。 20.7阶圈的点色数是。 三、运算题(共5小题,每小题8分,共40分) 21.求?xF(x)→?yG(x,y)的前束范式。 22.已知无向图G有11条边,2度和3度顶点各两个,其余为4度顶点,求G 的顶点数。 23.设A={a,b,c,d,e,f},R=I A?{ 一、 填空 1.不能再分解的命题称为,至少包含一个联结词的命题称为。 2.一个命题公式A(P , Q, R)为真的所有真值指派是000, 001, 010, 100,则其主析取范式是,其主合取范式是。 3.设 {},{},{},则( A ? B ) ⊕C = 。 4.幂集 P(P(?)) = 。 5.设A 为任意集合,请填入适当运算符,使式子?;’=?成立。 6.设{0,1,2,3,6},{〈〉≠y ∧(∈A)∧y≡x( 3)},则D(R),R(R)。 7.称集合S 是给定非空集合A 的覆盖:若{S 1,S 2,…,},其中?,≠?,1,2,…,n ,且 ;进一步若 ,则S 是集合A 的划分。 8.两个重言式的析取是 式,一个重言式和一个永假式的合取式是 式。 9.公式 ┐(P ∨Q) ←→(P ∧Q)的主析取范式是 。 10. 已知Π={{a}{}}是{}的一个划分,由Π决定的A 上的一个等价关系是 。 二、 证明及求解 1.求命题公式(P →Q )→(Q ∨P )的主析取范式。 2.推理证明题 1)?P ∨Q ,?Q ∨R ,R →S ?P →S 。 2) (?x)(P(x)→Q(y)∧R(x)),(?x)P(x)?Q(y)∧(?x)(P(x)∧R(x)) 3.设{0,1,2,3},{〈〉∈A ∧(1∨2x )},{〈〉∈A ∧(2)}。试求οο。 4.证明:R 是传递的?R *R ?R 。 5.设R 是A 上的二元关系,{ 5.4.3 动态校正——PI 调节器的设计 设计一个反馈闭环调速系统,首先应进行总体设计,基本部件选择和稳态参数计算,这样就形成了基本的闭环控制系痛,或称原始系统。然后应该建立原始系统的动态数学模型,检查它的稳定性和其他动态性能指标。如果原始系统不稳定或动态性能不好,就应该配置合适的校正装置,使校正后的系统全面满足性能指标要求。 校正的方式很多,而且对于一个具体的系统而言,能够满足性能要求的校正方案也很多,并不是唯一的。常用的校正方法有很多: (1) 串联校正:将校正装置串联在系统的前向通道中来改善系统性能的校正方法。由运算放大器组成一定的有源校正网络,传递函数相乘,处理方便,在机电控制系统中应用最多。 比例校正传函0110()()U s R U s R =超前校正传函 控制系统采用串联超前校正,主要用来补偿系统的相位滞后,以改善系统的稳定性,增加稳定裕度,减少伺服系统的速度误差,提高系统的快速响应。也常用来抵消系统前向通道中不希望有的极点,拓宽系统的通频带。需要注意的是:当信号夹杂噪声干扰时,串入有源超前校正时要特别注意防止噪声将信号通道阻塞。 一阶滞后环节传递函数 采用串联滞后校正,主要用来提高系统的稳态精度;又可用来限制系统的通频带;当系统前向通道受干扰作用时,在扰动作用点之前给系统串入纯积分环节,就可补偿缓慢变化的干扰对系统的影响,但他将使系统的相位滞后,快速性变差,引起条件稳定问题。 一阶微分环节传函 积分环节传递函数 02111()(1) / () p p U s K Ts K R R T R C U s =+==021 2()1()1 /p i p U s K U s Ts K R R T R C =+==0211221() ()1i U s T s T R C T R C U s T s ===+01()1 () i U s T R C U s Ts == 专科《离散数学模拟》试题(一) 姓名______________ 学号______________ 成绩______________ 一、填空(每小题5分,共25分) 1.设}41,,3|{≤≤∈==K N k k x x A ,则用列举法表示A =_____________________. 2.设}2,{φ=A ,则A 的幂集=A 2________________________. 3.设)}1,2(),2,4(),3,1{(=ρ是A 到B 的关系,则ρ的逆关系=ρ ~_______________. 4.下图G 的邻接矩阵 A =__________________________ 5.设}},3,2{,3,2{φ=A ,则=-}}3,2{{A 二、选择题(将正确答案的编号填入相应题目后面的括号中,每小题5分,共20分) 1.设集合}3,2,1{=A ,A 上的关系)}1,1(),1,2(),1,3(),3,2{(=ρ,则ρ是( ). A .自反的 B .反对称的 C .可传递的 2.设有函数Z Z Z f →?:(Z 表示非负整数集),定义为y x y x f +=),(,则f 是( ). A .满射 B .内射 C .双射 3.设}4,3,2,1{=A ,则A 的分划有( ). A .}}3{},4,2{),1{( B .}}4{},3,2{{ C .}}4{},3,2,1{{ 4.设简单图G 所有结点的度之和为12,则G 一定有( ). A .3条边 B .4条边 C .6条边 4 v 3v 2 v 1v 三、问答题(每小题6分,共42分) 1.下图G 是否二部图?若是,找出它的互补结点子集. 2.设有命题公式)(Q P P F →?∨=,问F 3.判断下图是否欧拉图,若是,找出一个欧拉回路. 4.设1ρ和2ρ是集合A 上的偏序关系,问1ρ- 5.判断下述命题公式的等值关系是否成立 P Q P Q P Q ∨??→∧→)(( 6.将下一命题符号化.分析到个体词、谓词和量词,使用全总个体域. “有些大学生不钦佩任何运动员” v 2v 1v 5 3v 5v 在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。 比例(P)控制 比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。 积分(I)控制 在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。 为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。 PID是比例,积分,微分的缩写.比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。积分调节作用:是使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成PI 调节器或PID调节器。微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。在微分时间选择合适情况下,可以减少超调,减少调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器 《离散数学》模拟试题3 一、填空题(每小题2分,共20分) 1. 已知集合A ={φ,1,2},则A得幂集合p(A)=_____ _。 2. 设集合E ={a, b, c, d, e}, A= {a, b, c}, B = {a, d, e}, 则A∪B =___ ___, A∩B =____ __,A-B =___ ___,~A∩~B =____ ____。 3. 设A,B是两个集合,其中A= {1, 2, 3}, B= {1, 2},则A-B =____ ___, ρ(A)-ρ(B)=_____ _ _。 4. 已知命题公式R Q P G→ ∧ ? =) (,则G的析取范式为。 5. 设P:2+2=4,Q:3是奇数;将命题“2+2=4,当且仅当3是奇数。”符号化 ,其真值为。 二、单项选择题(选择一个正确答案的代号填入括号中,每小题4分,共16分。) 1. 设A、B是两个集合,A={1,3,4},B={1,2},则A-B为(). A.{1} B. {1, 3} C. {3,4} D. {1,2} 2. 下列式子中正确的有()。 A. φ=0 B. φ∈{φ} C. φ∈{a,b} D. φ∈φ 3. 设集合X={x, y},则ρ(X)=()。 A. {{x},{y}} B. {φ,{x},{y}} C. {φ,{x},{y},{x, y}} D. {{x},{y},{x, y}} 4. 设集合A={1,2,3},A上的关系R={(1,1),(2,2),(2,3),(3,3),(3,2)}, 则R不具备(). 三、计算题(共50分) 1. (6分)设全集E=N,有下列子集:A={1,2,8,10},B={n|n2<50 ,n∈N},C= {n|n可以被3整除,且n<20 ,n∈N},D={n|2i,i<6且i、n∈N},求下列集合:(1)A∪(C∩D) (2)A∩(B∪(C∩D)) (3)B-(A∩C) (4)(~A∩B) ∪D 2. (6分)设集合A={a, b, c},A上二元关系R1,R2,R3分别为:R1=A×A, R2 ={(a,a),(b,b)},R3 ={(a,a)},试分别用 定义和矩阵运算求R1·R2 , 2 2 R,R 1 ·R2 ·R3 , (R1·R2 ·R3 )-1 。 3.(6分)化简等价式(﹁P∧(﹁Q∧R))∨(Q∧R)∨(P∧R). 4.(8分) 设集合A={1,2,3},R为A上的二元关系,且 M R= 写出R的关系表达式,画出R的关系图并说明R的性质. 5. (10分)设公式G的真值表如下. 试叙述如何根据真值表求G的 主析取范式和主合取范式,并 写出G的主析取范式和主合取范式. 1 0 0 1 1 0 1 0 0离散数学模拟试卷和答案
连续传递函数离散化的方法与原理
数字PI调节器
离散数学模拟试题及答案
计算机控制实验报告-离散化方法研究解析
PI控制器要点
离散数学考试试题(A、B卷及答案)
离散数学期末试卷A卷及答案
离散数学模拟试卷和答案
PI调节规律
离散数学期末试卷及答案
离散数学模拟题及答案
动态校正—PI调节器的设计
专科离散数学模拟试题
PI调节器
离散数学第五版--模拟试题--及答案
相关主题
文本预览