第一章概述 1、1 直流―直流变换的分类 直流—直流变换器(DC-DC)就是一种将直流基础电源转变为其她电压种类的直流变换装置。目前通信设备的直流基础电源电压规定为?48V,由于在通信系统中仍存在?24V(通信设备)及+12V、+5V(集成电路)的工作电源,因此,有必要将?48V基础电源通过直流—直流变换器变换到相应电压种类的直流电源,以供实际使用。D C/DC变换就是将固定的直流电压变换成可变的直流电压,也称为直流斩波。主要有 (1)Buck电路——降压斩波,其输出平均电压小于输入电压,极性相同。 (2)Boost电路——升压斩波,其输出平均电压大于输入电压,极性相同。 (3)Buck-Boost电路——降压―升压斩波,其输出平均电压大于或小于输入电压,极性相反,电感传输。 (4)Cuk电路——降压或升压斩波,其输出平均电压大于或小于输入电压,极性相反,电容传输。 此外还有Sepic、Zeta电路。 1、2 直流—直流变换器的发展 当今软开关技术的发展使得DC/DC发生了质的飞跃,美国VICOR公司(美国怀格公司,国际知名的电源模块生产厂家)设计制造的多种ECI软开关DC/DC变换器,其最大输出功率有300W、600W、800W等,相应的功率密度为(6、2、10、17)W/cm3,效率为(80~90)%。日本NEMIC—LAMBDA(联美兰达,日本的开关电源厂商、2012年兰达被TDK收购,名称也改为TDK-LAMBDA)公司最新推出的一种采用软开关技术的高频开关电源模块RM系列,其开关频率为(200~300)kHz,功率密度已达到27W/cm3,采用同步整流器(MOSFET代替肖特基二极管),使整个电路效率提高到90%。
关于共模反馈环路稳定性的考虑Return To Innocence 在全差分运放的设计中,通常共模反馈的环路会比主运放的级数要多,这时共模反馈环路中多个极点会影响环路的稳定性,这里试着对此问题做些分析 下图是一个简单的两级全差分放大器,其中的cmfb部分利用两个VCVS得到输出信号的共模,再与输入的Vcmo比较得到cmfb的反馈控制信号。 考虑共模反馈环路,其中存在3个极点,包括运放第一级的输出极点、第二级的输出极点以及cmfb节点对应的极点。与分析运放稳定性问题一样,前两者分别为主极点和次主极点,对于第3个极点,由于其阻抗和输出极点一样在1/gm 量级(实际上,为消除系统失调,运放输出共源放大的mos 管和cmfb的二极管连接的mos管有相同的过驱动电压,其gm按w/l成比例),不能简单的忽略。 实际上,这个cmfb的极点与上图中P管的特征频率ft相关,为此我们需要为其选择一个合适的过驱动电压Vov:首先Vov不能太低,这样才能以保证其ft在足够高的频率,以避免cmfb极点对环路的作用;同时这Vov也不能太高,他必须提供一定的gm/Id,保证运放输出级在电流一定的条件下
有足够的gm,从而避免运放输出极点频率的下降。 上面是对利用理想VCVS得到输出共模的方式下的一些分析,下面我们看看实际的得到输出共模电路中的问题。 以电阻方式等到输出信号的共模电平是一种常见的方法,如果忽略前面电路的输出阻抗,cm-sense的电阻Rs和之后的共模比较电路的栅节点电容Cx会在共模反馈的环路中引入一个极点。考虑到一般Rs至少要在Rds量级以避免其对运放增益的衰减,这位个极点的位置不会太高,因此必须加以考虑。实际中,可通过在电阻Rs上并联电容Cs来减小这一极点的影响。 在上面的电路中, 通过简单的分析, 可以得到: 引入Cs 之后, 由cm-sense 部分引入的零极点为: Po=1/(Rs*(Cs+Cx)), Zo=1/(Rs*Cs), 即在极点之后补了一个零点来抵消其作用. 至于具体的Cs 的取值, 考虑Cs 至少与Cx 比较接近, cmfb 环路才能得到一定的相位裕度, 若进一步考虑零极点对建立时间的影响, 应该将Cs/Cx 取为一定值以上才能将零极点拉的足够近, 以减小这一零极点对对共模信号建立时间的影响。 2 您可能也喜欢:
开关电源闭环反馈响应及测试 开关电源依靠反馈控制环路来保证在不同的负载情况下得到所需的电压和电流。反馈控制环路的设计影响到许多因素,包括电压调整、稳定性和瞬态响应。当某个反馈控制环路在某个频率的环路增益为单位增益或更高且总的相位延迟等于360 时,反馈控制环路将会产生振荡。稳定性通常用下面两个参数来衡量: 相位裕量:当环路增益为单位增益时实际相位延迟与360 间的差值,以度为单位表示。 增益裕量:当总相位延迟为360 时,增益低于单位增益的量,以分贝为单位表示。 对多数闭环反馈控制系统,当环路增益大于0dB时,相位裕量都大于45 (小于315 )。当环路相位延迟达到360 时,增益裕量为-20dB或更低。 如果这些条件得到满足,控制环将具有接近最优的响应;它将是无条件稳定的,即不会阻尼过小也不会阻尼过大。通过测量在远远超出控制环通常操作带宽的情况下控制环的频率响应,可以保证能够反映出所有可能的情况。 一个单输出开关电源的控制环增益和相位响应曲线。测量是利用一个GP102增益相位分析仪(一种独立的用来评价控制环增益和相位裕量的仪器)进行的,然后输入到电子表软件中。 在这一例子中,从0dB增益交点到360 测量得到的相位裕量为82 (360 到 278 )。从0dB增益交点到相位达到360 的增益裕量为-35dB。把这些增益和相位裕量值与-20dB增益裕量和60 相位裕量的目标值相比较,可以肯定被测试电源的瞬态响应和调节是过阻尼的,也是不可接受的。 0dB交点对应的频率为160Hz,这导致控制环的响应太慢。理想情况下,在1或2KHz处保持正的环增益是比较合适的,考虑到非常保守的增益和相位裕量,不必接近不稳定区即可改善控制环的动态特性。当然需要对误差放大器补偿器件进行一些小的改动。进行修改后,可以对控制环重新进行测试以保证其无条件稳定性。通常可利用频率响应分析仪(FRA)或增益-相位分析仪进行这种测量。这些仪器采用了离散傅里叶变换(DFT)技术,因为被测信号经常很小且被掩盖在噪声和电源开关台阶所产生的失真中。DFT用来从中提取出感兴趣的信号。 测试信号注入 为进行测量,FRA向控制环中注入一个已知频率的误差信号扰动。利用两个FRA通道来判断扰动要多长时间才能从误差放大器输入到达电源输出。 扰动信号应该在控制环反馈信号被限制在单条路径的地方注入,并且来自低阻抗的驱动源。连接到电源输出或误差放大器输出的反馈路径是注入扰动信号的好地方。 通过信号发生器通过一个隔离变压器连接到测试电路,以保证FRA信号发生器和被测试电路间的电气隔离。注入方法将扰动信号注入到误差放大器的输入。对于电源输出电压在FRA最大输入电压限制以内的情况,这一方法是合适的。 如果被测量电源的输出电压比FRA最大输入电压还要高,那么第一种注入方法就不适用了。扰动信号被注入到误差放大器的输出,此处的控制环对地电压比较低。如果电源电压超过FRA输入范围则应采用这种注入方法。
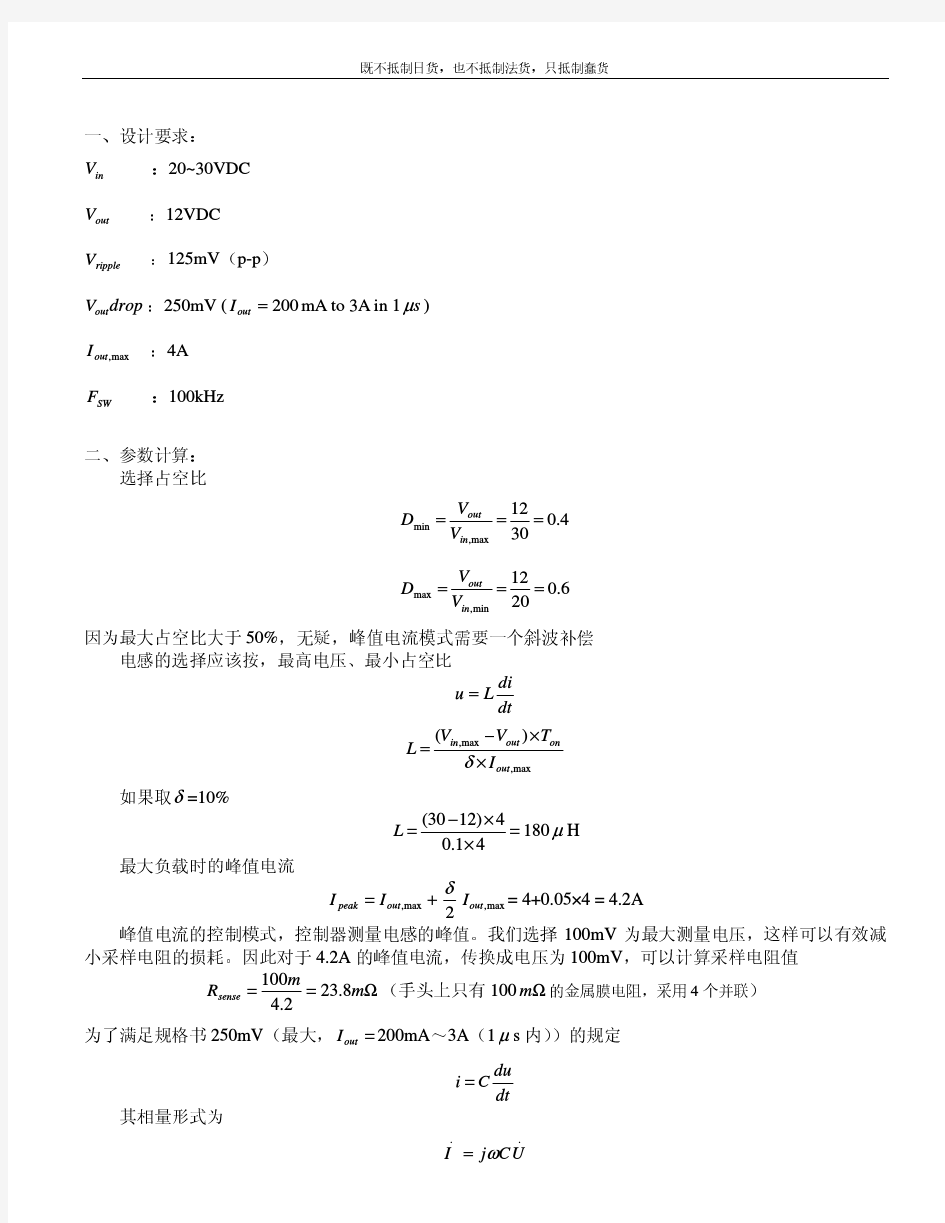
uck 电路的设计与仿真 1、Buck 电路设计: 设计一降压变换器,输入电压为 20V ,输出电压5V ,要求纹波电压为输出 电压的0.5%,负载电阻10欧姆,求工作频率分别为10kHz 和50kHz 时所需的 电感、电容。比较说明不同开关频率下,无源器件的选择。 解:(1)工作频率为10kHz 时, A.主开关管可使用MOSFET ,开关频率为10kHz ; B 输入20V ,输出5V ,可确定占空比 Dc=25% ; C.根据如下公式选择电感 这个值是电感电流连续与否的临界值,L>L c 则电感电流连续,实际电感值 可选为1.1~1.2倍的临界电感,可选择为4 10?H ; D.根据纹波的要求和如下公式计算电容值 C=^^T s2 J =4.17 10 牛 8L^U 。 8 沃 4.5 沃 10 X0.0055 1 0000 (2)工作频率为50kHz 时, A.主开关管可使用MOSFET ,开关频率为50kHz ; B 输入20V ,输出5V ,可确定占空比 Dc=25% ; C.根据如下公式选择电感 . (1—DJR T (1 —0.25)汇10,. 1 L c (1 _DJR T 2 s (1-0.25)1° 亠 2 10000 = 3.75 10* H 5 (1-0.25) 0.75 10, H 50000 这个值是电感电流连续与否的临界值, L>Lc 则电感电流连续,实际电感值
L c T s 2
可选为1.2倍的临界电感,可选择为0.9 10" H ; D.根据纹波的要求和如下公式计算电容值 分析:在其他条件不变的情况下,若开关频率提高 n 倍,则电感值减小为 1/n ,电容值也减小到1/n 。从上面推导中也得出这个结论 2、Buck 电路仿真: 利用sim power systems 中的模块建立所设计降压变换器的仿真电路。输 入电压为20V 的直流电压源,开关管选 MOSFET 模块(参数默认),用Pulse Gen erator 模块产生脉冲驱动开关管 建模: 分别做两种开关频率下的仿真 工作频率为10kHz 时 U o (1-D c ) 8L U o T s 2 5 (1-0.25) 1 8 0.9 10J 0.005 5 500002 = 0.833 10*F matlab20120510 ?
运放稳定性分析 环路稳定性基础 引言 本系列所采用的所有技术都将“以实例来定义”,而不管它在其他应用中能否用普通公式来表达。为便于进行稳定性分析,我们在工具箱中使用了多种工具,包括数据资料信息、技巧、经验、SPICE仿真以及真实世界测试等,都将用来加快我们的稳定运放电路设计。尽管很多技术都适用于电压反馈运放,但上述这些工具尤其适用于统一增益带宽小于20MHz的电压反馈运放。选择增益带宽小于20MHz的原因是,随着运放带宽的增加,电路中的其他一些主要因素会形成回路,如印制板(PCB) 上的寄生电容、电容中的寄生电感以及电阻中的寄生电容与电感等。我们下面介绍的大多数经验与技术并非仅仅是理论上的,而且是从利用增益带宽小于20MHz的运放、实际设计并构建真实世界电路中得来的。 本系列的第1部分回顾了进行稳定性分析所需的一些基本知识,并定义了将在整个系列中使用的一些术语。 波特图(曲线)基础 幅度曲线的频率响应是电压增益改变与频率改变的关系。这种关系可用波特图上一条以分贝(dB) 来表示的电压增益比频率(Hz) 曲线来描述。波特幅度图被绘成一种半对数曲线:x轴为采用对数刻度的频率(Hz)、y轴
则为采用线性刻度的电压增益(dB) ,y轴最好是采用方便的每主格45°刻度。波特图的另一半则是相位曲线(相移比频率),并被描绘成以“度”来表示的相移比频率关系。波特相位曲线亦被绘成一种半对数曲线:x轴为采用对数刻度的频率(Hz)、y轴为采用线性刻度的相移(度),y轴最好是采用方便的每主格45°刻度。 幅度波特图要求将电压增益转换成分贝(dB) 。进行增益分析时,我们将采用以dB(定义为20Log10A)表示的电压增益,其中A为以伏/伏表示的电压增益。
第六章 开关电源反馈设计 除了磁元件设计以外,反馈网络设计也是开关电源了解最少、且非常麻烦的工作。它涉及到模拟电子技术、控制理论、测量和计算技术等相关问题。 开关电源环路设计的目标是要在输入电压和负载变动范围内,达到要求的输出(电压或电流)精度,同时在任何情况下应稳定工作。当负载或输入电压突变时,快速响应和较小的过冲。同时能够抑制低频脉动分量和开关纹波等等。 为了较好地了解反馈设计方法,首先复习模拟电路中频率特性、负反馈和运算放大器基本知识,然后以正激变换器为例,讨论反馈补偿设计基本方法。并介绍如何通过使用惠普网络分析仪HP3562A 测试开环响应,再根据测试特性设计校正网络和验证设计结果。最后对仿真作相应介绍。 6.1 频率响应 在电子电路中,不可避免存在电抗(电感和电容)元件,对于不同的频率,它们的阻抗随着频率变化而变化。经过它们的电信号不仅发生幅值的变化,而且还发生相位改变。我们把电路对不同频率正弦信号的输出与输入关系称为频率响应。 6.1.1 频率响应基本概念 电路的输出与输入比称为传递函数或增益。传递函数与频率的关系-即频率响应可以用下式表示 )()(f f G G ?∠= 其中G (f )表示为传递函数的模(幅值)与频率的关系,称为幅频响应;而∠?(f )表示输出信号与输入信号的相位差与频率的关系,称为相频响应。 典型的对数幅频响应如图6.1所示,图6.1(a)为幅频特性,它是画在以对数频率f 为横坐标的单对数坐标上,纵轴增益用20log G (f )表示。图6.1(b)为相频特性,同样以对数频率f 为横坐标的单对数坐标上,纵轴表示相角?。两者一起称为波特图。 在幅频特性上,有一个增益基本不变的频率区间,而当频率高于某一频率或低于某一频率,增益都会下降。当高频增高时,当达到增益比恒定部分低3dB 时的频率我们称为上限频率,或上限截止频率f H ,大于截止频率的区域称为高频区;在低频降低时,当达到增益比恒定部分低3dB 时的频率我们称为下限频率,或下限截止频率f L ,低于下限截止频率的区域称为低频区;在高 频截止频率与低频截止频率之间称为中频区。在这个区域内增益基本不变。同时定义 L H f f BW -= (6-1) 为系统的带宽。 6.1.2 基本电路的频率响应 1. 高频响应 在高频区,影响系统(电路)的高频响应的电路如图6.2所示。以图6.2a 为例,输出电压与输入电压之比随频率增高而下降,同时相位随之滞后。利用复变量s 得到 R s C sC R sC s U s U s G i o +=+== 11 /1/1)()()( (6-2) 对于实际频率,s =j ω=j 2πf ,并令 BW f H 103 103 (b) 图6.1 波特图
典型的两级运算放大器环路稳定性分析 典型的两级运放如图所示,负载电容CL=50fF。 首先建立静态工作点。加偏置电流I0=4uA,加共模输入电平1.25V。仿真后得到结果如下,静态工作点是合适的。 1.开环分析 米勒补偿前做开环分析如下,显然,这是不合适的。
加米勒补偿电容Cc=200fF,做开环分析如下,显然,这也是不合适的。这是由于电路中存在零点造成的。
加入调零电阻Rz=40K,,仿真结果如下。可以看出,, ,相位裕度为40度,不够。可通过加大补偿电容来进一步分裂p1,p2主次极 点。(已尝试过加米勒补偿电容Cc=300fF可以得到大于60度的相位裕度)。但是本次设计的运放用在负反馈环路中,故只需要负反馈环路是稳定的就达到设计标准。 理论计算。 查看各管子的静态工作点。 ,,,即。 ,,,即 。
, 。理论值与仿真结果非常接近。 ,理论值与仿真结果非常接近。 , ,理论值与仿真结果非常接近。 , ,理论值 与仿真结果40度偏差较大。 2.在负反馈环路中做环路稳定性分析:
从上图可以看出,加入反馈电阻网络R1,R2后就打破了原有的静态工作点:主要是反馈电阻网络R1,R2中的电流由M7管提供,所以M7管的静态工作点打破了,即运放的第二级跨导GmⅡ,输出电阻R2都变了。从波特图中可以看出相位裕度为77度,满足设计标准。理论计算: 查看各管子的静态工作点。 ,, ,即。 ,,,即 。 , 。理论值与仿真结果非常接近。 ,理论值与仿真结果非常接近。 。 ,理论值与仿真结果非常接近。 ,
,理论值 与仿真结果77度偏差较大。 此结果可能是由于gm7变大,原来的调零电阻RZ过大造成的。现在改变调零电阻Rz=25K, ,仿真结果如下: 此时,相位裕度为63度,满足设计标准。 3.改用大电感大电容仿真环路增益:
环路相位-开关电源稳定性设计 专业技术 环路相位-开关电源稳定性设计 摘要:环路,相位,增益,负载,开关电源,稳定性,电压,相移,电源,频率, 信号接收机-基于单芯片的GPS接收机硬件设计白光调光-白光和彩色光智能照明系统解决方案设备方案-台达UPS在中小企业中的创新应用方案触摸屏电容-电容式触摸屏系统解决方案测量肺活量-利用高性能模拟器件简化便携式医疗设备设计测量温度-热敏电阻(NTC)的基本参数及其应用动能产品-动能电子企业文化活动丰富员工生活电路板镀锡-无锡华文默克发布PCB/SMT工艺方案引擎电压-采用接近传感器的火花探测器太阳能控制器-太阳能LED街灯的挑战及安森美半导体高能效解决方案众所周知,任何闭环系统在增益为单位增益l,且内部随频率变化的相移为360°时,该闭环控制系统都会存在不稳定的可能性。因此几乎所有的开关电源都有一个闭环反馈控制系统,从而能获得较好的性能。在负反馈系统中,控制放大器的连接方式 有意地引入了180°相移,如果反馈 众所周知,任何闭环系统在增益为单位增益l,且内部随频率变化的相移为360°时,该闭环控制系统都会存在不稳定的可能性。因此几乎所有的开关电源都有一个闭环反馈控制系统,从而能获得较好的性能。在负反馈系统中,控制放大器的连接方式有意地引入了180°相移,如果反馈的相位保持在180°以内,那么控制环路将总是稳定的。当然,在现实中这种情况是不会存在的,由于各种各样的开关延时和电抗引入了额外的相移,如果不采用适合的环路补偿,这类相移同样会导致开关电源的不稳定。 1 稳定性指标衡量开关电源稳定性的指标是相位裕度和增益裕度。相位裕度是指:增益降到0dB 时所对应的相位。增益裕度是指:相位为-180度时所对应的增益大小(实际是衰减)。在实际设计开关电源时,只在设计反激变换器时才考虑增益裕度,设计其它变换器时,一般不使用增益裕度。在开关电源设计中,相位裕度有两个相互独立作用:一是可以阻尼变换器在负载阶跃变化时出现的动态过程;另一个作用是当元器件参数发生变化时,仍然可以保证系统稳定。相位裕度只能用来保证“小信号稳定”。在负载阶跃变化时,电源不可避免要进入“大信号稳定”范围。工程中我们认为在室温和标准输入、正常负载条件下,环路的相位裕度要求大于45°。在各种参数变化和误差情况下,这个相位裕度足以确保系统稳定。如果负载变化或者输入电压范围变化非常大,考虑在所有负载和输入电压下环路和相
第一章概述 1.1 直流―直流变换的分类 直流—直流变换器(DC-DC)是一种将直流基础电源转变为其他电压种类的直流变换装置。目前通信设备的直流基础电源电压规定为?48V,由于在通信系统中仍存在?24V(通信设备)及+12V、+5V(集成电路)的工作电源,因此,有必要将?48V基础电源通过直流—直流变换器变换到相应电压种类的直流电源,以供实际使用。D C/DC变换是将固定的直流电压变换成可变的直流电压,也称为直流斩波。主要有 (1)Buck电路——降压斩波,其输出平均电压小于输入电压,极性相同。 (2)Boost电路——升压斩波,其输出平均电压大于输入电压,极性相同。 (3)Buck-Boost电路——降压―升压斩波,其输出平均电压大于或小于输入电压,极性相反,电感传输。 (4)Cuk电路——降压或升压斩波,其输出平均电压大于或小于输入电压,极性相反,电容传输。 此外还有Sepic、Zeta电路。 1.2 直流—直流变换器的发展 当今软开关技术的发展使得DC/DC发生了质的飞跃,美国VICOR公司(美国怀格公司,国际知名的电源模块生产厂家)设计制造的多种ECI软开关DC/DC变换器,其最大输出功率有300W、600W、800W等,相应的功率密度为(6.2、10、17)W/cm3,效率为(80~90)%。日本NEMIC—LAMBDA(联美兰达,日本的开关电源厂商.2012年兰达被TDK收购,名称也改为TDK-LAMBDA)公司最新推出的一种采用软开关技术的高频开关电源模块RM系列,其开关频率为(200~300)kHz,功率密度已达到27W/cm3,采用同步整流器(MOSFET代替肖特基二极管),使整个电路效率提高到90%。
关于共模反馈环路稳定性的考虑 | Return To Innocence 收藏人:mzsm 2014-10-13 | 阅:转:| 来源| 分享 在全差分运放的设计中,通常共模反馈的环路会比主运放的级数要多,这时共模反馈环路中多个极点会影响环路的稳定性,这里试着对此问题做些分析 下图是一个简单的两级全差分放大器,其中的cmfb部分利用两个VCVS得到输出信号的共模,再与输入的Vcmo比较得到cmfb的反馈控制信号。
考虑共模反馈环路,其中存在3个极点,包括运放第一级的输出极点、第二级的输出极点以及cmfb节点对应的极点。与分析运放稳定性问题一样,前两者分别为主极点和次主极点,对于第3个极点,由于其阻抗和输出极点一样在1/gm量级(实际上,为消除系统失调,运放输出共源放大的mos管和cmfb的二极管连接的mos管有相同的过驱动电压,其gm按w/l成比例),不能简单的忽略。 实际上,这个cmfb的极点与上图中P管的特征频率ft相关,为此我们需要为其选择一个合适的过驱动电压Vov:首先Vov不能太低,这样才能以保证其ft在足够高的频率,以避免cmfb极点对环路的作用;同时这Vov也不能太高,他必须提供一定的gm/Id,保证运放输出级在电流一定的条件下有足够的gm,从而避免运放输出极点频率的下降。 上面是对利用理想VCVS得到输出共模的方式下的一些分析,下面我们看看实际的得到输出共模电路中的问题。 以电阻方式等到输出信号的共模电平是一种常见的方法,如果忽略前面电路的输出阻抗, cm-sense的电阻Rs和之后的共模比较电路的栅节点电容Cx会在共模反馈的环路中引入一个极点。考虑到一般Rs至少要在Rds量级以避免其对运放增益的衰减,这位个极点的位置不会太高,因此必须加以考虑。实际中,可通过在电阻Rs上并联电容Cs来减小这一极点的影响。
Buck电路设计与仿真 姓名:朱龙胜 班级:电气1102 学号:11291065 日期:2014年5月10日 指导老师:郭希铮 北京交通大学
计算机仿真技术作业四 题目:Buck 电路的设计与仿真 1、Buck 电路设计: 设计一降压变换器,输入电压为20V ,输出电压5V ,要求纹波电压为输出电压的0.5%,负载电阻10欧姆,求工作频率分别为10kHz 和50kHz 时所需的电感、电容。比较说明不同开关频率下,无源器件的选择。 2、Buck 电路理论计算: 由以下公式计算: 20.252.0.5A (1) 3.5% 8() 4.2o d o o o s o s d o LB OB V D V V I R V T D V LC DT V V I I L = == =?-==-== 1.占空比: 负载电流: 纹波电压: 电流连续条件: 得到下列计算结果 3、Buck 电路仿真: 利用simpowersystems 中的模块建立所设计降压变换器的仿真电路。输入电压为20V 的直流电压源,开关管选MOSFET 模块(参数默认),用Pulse Generator 模块产生脉冲驱动开关管。分别做两种开关频率下的仿真。 (1)使用理论计算的占空比(D=0.25),记录直流电压波形,计算稳态直流电压值,计算稳态直流纹波电压,并与理论公式比较,验证设计指标。 4、仿真过程:: A .建立模型: 建立仿真模型如下如所示 :
B. 记录数据: 仿真算法选择ode23tb,最大步长为0.1s ,占空比D=0.25进行仿真,记录数据如下表所 C .仿真过程: 当f s =10KHz,L=0.375mH C=500μF, 占空比D=0.25,电流连续的临界状态时,记录稳态直流电压值V o =4.736V ,稳态直流电压理论值5V 计算稳态直流纹波电压的理论值 2(1D)0.025V 8s o o T V V CL -?==,通过图中得到直流纹波电压为0.0267V 当fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态时, 由(1)o S L V D T I L -?= ,得电感电流波动理论值是1A ,由图像得到电感电流波动值是 1A ,与理论计算相符合
开关电源峰值电流模式控制PWM的优缺点 近年来电流模式控制面临着改善性能后的电压模式控制的挑战,因为这种改善性能的电压模式控制加有输入电压前馈功能,并有完善的多重电流保护等功能,在控制功能上已具备大部分电流模式控制的优点,而在实现上难度不大,技术较为成熟。 由输出电压VOUT 与基准信号VREF的差值经过运放(E/A)放大得到的误差电压信号 VE 送至PWM比较器后,并不是象电压模式那样与振荡电路产生的固定三角波状电压斜波比较,而是与一个变化的其峰值代表输出电感电流峰值的三角状波形或梯形尖角状合成波形信号 VΣ比较,然后得到PWM脉冲关断时刻。因此(峰值)电流模式控制不是用电压误差信号直接控制PWM脉冲宽度,而是直接控制峰值输出侧的电感电流大小,然后间接地控制PWM脉冲宽度。 电流模式控制是一种固定时钟开启、峰值电流关断的控制方法。因为峰值电感电流容易传感,而且在逻辑上与平均电感电流大小变化相一致。但是,峰值电感电流的大小不能与平均电感电流大小一一对应,因为在占空比不同的情况下,相同的峰值电感电流的大小可以对应不同的平均电感电流大小。而平均电感电流大小才是唯一决定输出电压大小的因素。电感电流下斜波斜率的至少一半以上斜率加在实际检测电流的上斜波上,可以去除不同占空比对平均电感电流大小的扰动作用,使得所控制的峰值电感电流最后收敛于平均电感电流。因而合成波形信号VΣ要有斜坡补偿信号与实际电感电流信号两部分合成构成。当外加补偿斜坡信号的斜率增加到一定程度,峰值电流模式控制就会转化为电压模式控制。因为若将斜坡补偿信号完全用振荡电路的三角波代替,就成为电压模式控制,只不过此时的电流信号可以认为是一种电流前馈信号。当输出电流减小,峰值电流模式控制就从原理上趋向于变为电压模式控制。 当处于空载状态,输出电流为零并且斜坡补偿信号幅值比较大的话,峰值电流模式控制就实际上变为电压模式控制了。峰值电流模式控制PWM是双闭环控制系统,电压外环控制电流内环。电流内环是瞬时快速的,是按照逐个脉冲工作的。 功率级是由电流内环控制的电流源,而电压外环控制此功率级电流源。在该双环控制中,电流内环只负责输出电感的动态变化,因而电压外环仅需控制输出电容,不必控制LC 储能电路。峰值电流模式控制PWM具有比起电压模式控制大得多的带宽。以下是开关电源峰值电流模式控制PWM的优缺点: 峰值电流模式控制PWM的优点是: ①暂态闭环响应较快,对输入电压的变化和输出负载的变化的瞬态响应均快; ②控制环易于设计; ③输入电压的调整可与电压模式控制的输入电压前馈技术相妣美; ④简单自动的磁通平衡功能; ⑤瞬时峰值电流限流功能,内在固有的逐个脉冲限流功能; ⑥自动均流并联功能。 峰值电流模式控制PWM的缺点是: ①占空比大于50%的开环不稳定性,存在难以校正的峰值电流与平均电流的误差。 ②闭环响应不如平均电流模式控制理想。 ③容易发生次谐波振荡,即使占空比小于50%,也有发生高频次谐波振荡的可能性。因而需要斜坡补偿。 ④对噪声敏感,抗噪声性差。因为电感处于连续储能电流状态,与控制电压编程决定的电流电平相比较,开关器件的电流信号的上斜波通常较小,电流信号上的较小的噪声就很容易使得开关器件改变关断时刻,使系统进入次谐波振荡。 ⑤电路拓扑受限制。
1. 绪论 在开关模式的功率转换器中,功率开关的导通时间是根据输入和输出电压来调节的。因而,功率转换器是一种反映输入与输出的变化而使其导通时间被调制的独立控制系统。由于理论近似,控制环的设计往往陷入复杂的方程式中,使开关电源的控制设计面临挑战并且常常走入误区。下面几页将展示控制环的简单化近似分析,首先大体了解开关电源系统中影响性能的各种参数。给出一个实际的开关电源作为演示以表明哪些器件与设计控制环的特性有关。测试结果和测量方法也包含在其中。 2. 基本控制环概念 2.1 传输函数和博得图 系统的传输函数定义为输出除以输入。它由增益和相位因素组成并可以在博得图上分别用图形表示。整个系统的闭环增益是环路里各个部分增益的乘积。在博得图中,增益用对数图表示。因为两个数的乘积的对数等于他们各自对数的和,他们的增益可以画成图相加。系统的相位是整个环路相移之和。 2.2 极点 数学上,在传输方程式中,当分母为零时会产生一个极点。在图形上,当增益以20dB每十倍频的斜率开始递减时,在博得图上会产生一个极点。图1举例说明一个低通滤波器通常在系统中产生一个极点。其传输函数和博得图也一并给出。 2.3 零点 零点是频域范围内的传输函数当分子等于零时产生的。在博得图中,零点发生在增益以20dB每十倍频的斜率开始递增的点,并伴随有90度的相位超前。图2 描述一个由高通滤波器电路引起的零点。 存在第二种零点,即右半平面零点,它引起相位滞后而非超前。伴随着增益递增,右半平面零点引起90度的相位滞后。右半平面零点经常出现于BOOST和
BUCK-BOOST转换器中,所以,在设计反馈补偿电路的时候要非常警惕,以使系统的穿越频率大大低于右半平面零点的频率。右半平面零点的博得图见图3。 3.0 开关电源的理想增益相位图 设计任何控制系统首先必须清楚地定义出目标。通常,这个目标是建立一个简单的博得图以达到最好的系统动态响应,最紧密的线性和负载调节率和最好的稳定性。理想的闭环博得图应该包含三个特性:足够的相位裕量,宽的带宽,和高增益。高的相位裕量能阻尼振荡并缩短瞬态调节时间。宽的带宽允许电源系统快速响应线性和负载的突变。高的增益保证良好的线性和负载调节率。 3.1 相位裕量 参看图4,相位裕量是在穿越频率处相位高于0度的数量。这不同于大多数控制系统教科书里提出的从-180度开始测量相位裕量。其中包括DC负反馈所提供的180度初始相移。在实际测量中,这180度相移在DC处被补偿并允许相位裕量从0度开始测量。 根据奈奎斯特稳定性判据,当系统的相位裕量大于0度时,此系统是稳定的。然而,有一个边界稳定区域存在,此处(指边界稳定区,译注),系统由于瞬态响应引起振荡到经过一个长的调节时间最终稳定下来。如果相位裕量小于45度,
BUCK 电路闭环PID 控制系统 的MATLAB 仿真 一、课题简介 BUCK 电路是一种降压斩波器,降压变换器输出电压平均值Uo 总是小于输入电压U i 。通常电感中的电流是否连续,取决于开关频率、滤波电感L 和电容C 的数值。 简单的BUCK 电路输出的电压不稳定,会受到负载和外部的干扰,当加入PID 控制器,实现闭环控制。可通过采样环节得到PWM 调制波,再与基准电压进行比较,通过PID 控制器得到反馈信号,与三角波进行比较,得到调制后的开关波形,将其作为开关信号,从而实现BUCK 电路闭环PID 控制系统。 二、BUCK 变换器主电路参数设计 2.1设计及内容及要求 1、 输入直流电压(VIN):15V 2、 输出电压(VO):5V 3、 输出电流(IN):10A 4、 输出电压纹波峰-峰值 Vpp ≤50mV 5、 锯齿波幅值Um=1.5V 6、开关频率(fs):100kHz 7、采样网络传函H(s)=0.3 8、BUCK 主电路二极管的通态压降VD=0.5V ,电感中的电阻压降 VL=0.1V ,开关管导通压降 VON=0.5V,滤波电容C 与电解电容 RC 的乘积为 F *Ωμ75
2.2主电路设计 根据以上的对课题的分析设计主电路如下: 图2-1 主电路图 1、滤波电容的设计 因为输出纹波电压只与电容的容量以及ESR 有关, rr rr C L N 0.2V V R i I == ? (1) 电解电容生产厂商很少给出ESR ,但C 与R C 的乘积趋于常数,约为50~80μ*ΩF [3]。在本课题中取为75μΩ*F ,由式(1)可得R C =25mΩ,C =3000μF 。 2、滤波电感设计 开关管闭合与导通状态的基尔霍夫电压方程分别如式(2)、(3)所示: IN O L ON L ON /V V V V L i T ---=?(2) O L D L OFF /V V V L i T ++=? (3) off 1/on s T T f += (4) 由上得: L in o L D on V V V V L T i ---=? (5) 假设二极管的通态压降V D =0.5V ,电感中的电阻压降V L =0.1V ,开关管导通压降V ON =0.5V 。利用ON OFF S 1T T f +=,可得T ON =3.73μS ,将此值回代式(5),可得L =17.5μH
反馈环路设计 稳定的反馈环路对开关电源来说是非常重要的,如果没有足够的相位裕度和幅值裕度,电源的动态性能就会很差或者出现输出振荡. 下面先介绍了控制环路分析里面必须用到的各种零,极点的幅频和相频特性;然后对最常用的反馈调整器TL431的零,极点特性进行分析;TOPSWITCH是市场上广泛应用的反激式电源的智能芯片,它的控制方式是比较复杂的电压型控制,为了方便一般使用者,内部集成了一部分补偿功能,所以很多工程师不清晰它的整个环路,最后运用上面的理论分析一个TOPSWITCH设计的电源,对它的环路的每一个部分进行了解剖,可以使工程师更好地应用TOPSWITCH及解决设计中遇到的环路问题. 波特图是分析开关电源控制环路的一个有力工具,它可以使复杂的幅频和相频响应的计算变成简单的加减法,特别是使用渐近线近似以后,只需要计算渐近线改变方向点的值. 增益按-20dB/10倍频程下降, 相位近似按-45°/10倍频程下降.最大相移为-90° 增益按20dB/10倍频程上升,相位近似按45°/10倍频程上升,最大总相移为90°
右半平面零点是反激和BOOST电路里面特有的现象.增益按20dB/10倍频程上升,相位近似按-45°/10倍频程下降,总相移为-90°,右半平面零点是几乎无法补偿的,做设计时尽量把其频率提升或降低带宽 Q值是电路的品质因数,过了谐振点后,增益按-40dB/10倍频程下降, 相位依Q值的不同有不同的变化率,Q值越大,相位变化越剧烈,在谐振点相位是-90°, 最大总相移为-180°
Q值是电路的品质因数,R2是负载电阻,R1是电感的电阻,电容的ESR, 整流管内阻,和代表磁心损耗和漏感损耗的合成电阻.大部分的AC/DC电源,由于损耗较高,一般Q值很难大于3. 当Q值较低时(Q<<0.5),双极点响应会退化为两个单极点响应,如上图所示. TL431用输出供电时的零,极点特性 TL431是开关电源次级反馈最常用的基准和误差放大器件,其供电方式不同对它的传递函数有很大的影响,而以前的分析资料常常忽略这一点.下面分析常见的供电和输出反馈接在一起时的传递函数.
电流型开关电源中电压反馈电路的设计 2007-11-29 09:35:15| 分类:电源| 标签:|字号大中小订阅 尚修香侯振义空军工程大学电讯工程学院 在传统的电压型控制中,只有一个环路,动态性能差。当输入电压有扰动时,通过电压环反馈引起占空比的改变速度比较慢。因此,在要求输出电压的瞬态误差较小的场合,电压型控制模式是不理想的。为了解决这个问题,可以采用电流型控制模式。电流型控制既保留了电压型控制的输出电压反馈,又增加了电感电流反馈,而且这个电流反馈就作为PWM控制变换器的斜坡函数,从而不再需要锯齿波发生器,使系统的性能具有明显的优越性。电流型控制方法的特点如下: 1、系统具有快速的输入、输出动态响应和高度的稳定性; 2、很高的输出电压精度; 3、具有内在对功率开关电流的控制能力; 4、良好的并联运行能力。 由于反馈电感电流的变化率直接跟随输入电压和输出电压的变化而变化。电压反馈回路中,误差放大器的输出作为电流给定信号,与反馈的电感电流比较,直接控制功率开关通断的占空比,所以电压反馈是电流型电源设计中很重要的问题。本文介绍使用电流型控制芯片uc3842时,电压反馈电路的设计。 一、uc3842简介 图1为UC3842PWM控制器的内部结构框图。其内部基准电路产生+5V基准电压作为UC3842内部电源,经衰减得2.5V电压作为误差放大器基准,并可作为电路输出5V/50mA的电源。振荡器产生方波振荡,振荡频率取决于外接定时元件,接在4脚与8脚之间的电阻R与接在4脚与地之间的电容C共同决定了振荡器的振荡频率,f=1.8/RC。反馈电压由2脚接误差放大器反相端。1脚外接RC网络以改变误差放大器的闭环增益和频率特性,6脚输出驱动开关管的方波为图腾柱输出。3脚为电流检测端,用于检测开关管的电流,当3脚电压≥1V时,UC3842就关闭输出脉冲,保护开关管不至于过流损坏。UC3842PWM 控制器设有欠压锁定电路,其开启阈值为16V,关闭阈值为10V。正因如此,可有效地防止电路在阈值电压附近工作时的振荡。 图1UC3842的内部结构框图如下: UC3842具有以下特点: 1、管脚数量少,外围电路简单,价格低廉; 2、电压调整率很好; 3、负载调整率明显改善; 4、频响特性好,稳定幅度大; 5、具有过流限制、过压保护和欠压锁定功能。 UC3842具有良好的线性调整率,因为输入电压Vi 的变化立即反应为电感电流的变化,它不经过任何误差放大器就能在比较器中改变输出脉冲宽度,再增加一级输出电压Vo至误差放大器的控制,能使线性调整率更好;可明显地改善负载调整率,因为误差放大器可专门用于控制由于负载变化造成的输出电压
Buck变换器设计——作业 一.Buck主电路设计 1.占空比D计算 2.电感L计算 3.电容C计算 4.开关元件Q的选取 二. Buck变换器开环分析 三. Buck闭环控制设计 1.闭环控制原理 2.补偿环节Gc(s)的设计——K因子法 3.PSIM仿真 4. 补偿环节Gc(s)的修正——应用sisotool 5.修正后的PSIM仿真 四.标称值电路PSIM仿真 五.设计体会 Buck变换器性能指标: 输入电压:标准直流电压48V,变化范围:43V~53V
输出电压:直流电压24V ,5A 输出电压纹波:100mv 电流纹波:0.25A 开关频率:fs=250kHz 相位裕度:60 幅值裕度:10dB 一. Buck 主电路设计: 1.占空比D 计算 根据Buck 变换器输入输出电压之间的关系求出占空比D 的变化范围。 .50V 48V 24U U D .4530V 53V 24U U D 0.558 V 43V 24U U D innom o nom max in o min min in o max ========= 2.电感L 计算 uH 105f i 2)D U -(U i 2)T U -(U L s L min o inmax L on(min) o inmax =?=?= 3.电容C 计算 uF 25.1250000 *1.0*825 .0vf 8i C s L ==??= 电容耐压值:由于最大输出电压为24.1V ,则电容耐压值应大于24.1V 。 考虑到能量储存以及伏在变化的影响,要留有一定的裕度,故电容选取120uf/50V 电容。 4.开关元件Q 的选取
6.4 开关电源闭环设计 从反馈基本概念知道:放大器在深度负反馈时,如输入不变,电路参数变化、负载变化或干扰对输出影响减小。反馈越深,干扰引起的输出误差越小。但是,深反馈时,反馈环路在某一频率附加相位移如达到180°,同时输出信号等于输入信号,就会产生自激振荡。 开关电源不同于一般放大器,放大器加负反馈是为了有足够的通频带,足够的稳定增益,减少干扰和减少线性和非线性失真。而开关电源,如果要等效为放大器的话,输入信号是基准(参考)电压U ref ,一般说来,基准电压是不变的;反馈网络就是取样电路,一般是一个分压器,当输出电压和基准 一定时,取样电路分压比(k v )也是固定的(U o =k v U ref ) 。开关电源不同于放大器,内部(开关频率)和外部干扰(输入电源和负载变化)非常严重,闭环设计目的不仅要求对以上的内部和外部干扰有很强抑制能力,保证静态精度,而且要有良好的动态响应。 对于恒压输出开关电源,就其反馈拓扑而言,输入信号(基准)相当于放大器的输入电压,分压器是反馈网络,这就是一个电压串联负反馈。如果恒流输出,就是电流串联负反馈。 如果是恒压输出,对电压取样,闭环稳定输出电压。因此,首先选择稳定的参考电压,通常为5~6V 或2.5V ,要求极小的动态电阻和温度漂移。其次要求开环增益高,使得反馈为深度反馈,输出电压才不受电源电压和负载(干扰)影响和对开关频率纹波抑制。一般功率电路、滤波和PWM 发生电路增益低,只有采用运放(误差放大器)来获得高增益。再有,由于输出滤波器有两个极点,最大相移180°,如果直接加入运放组成反馈,很容易自激振荡,因此需要相位补偿。根据不同的电路条件,可以采用Venable 三种补偿放大器。补偿结果既满足稳态要求,又要获得良好的瞬态响应,同时能够抑制低频纹波和对高频分量衰减。 6.4.1 概述 图6.31为一个典型的正激变换器闭环调节的例子。可以看出是一个负反馈系统。PWM 控制芯片中包含了误差放大器和PWM 形成电路。控制芯片也提供许多其他的功能,但了解闭环稳定性问题,仅需 考虑误差放大器和PWM 。 对于输出电压U o 缓慢或直流变化,闭环当然是稳定的。例如输入电网或负载变化(干扰),引起U o 的变化,经R 1和R 2取样(反馈网络),送到误差放大器EA 的反相输入端,再与加在EA 同相输入端的参考电压(输入电压)U ref 比较。将引起EA 的输出直流电平U ea 变化,再送入到脉冲宽度调制器PWM 的输入端A 。在PWM 中,直流电平U ea 与输入B 端0~3V 三角波U t 比较,产生一个矩形脉冲输出,其宽度t on 等于三角波开始时间t0到PWM 输入B 三角波与直流电平相交时间t1。此脉冲宽度决定了芯片中输出晶体管导通时间,同时也决定了控制晶体管Q1的导通时间。U dc 的增加引起U y 的增加,因U o =U y t o n /T ,U o 也随之增加。U o 增加引起Us 增加,并因此U ea 的减少。从三角波开始到t1的t on 相应减少, U o 恢复到它的初始值。当然,反之亦然。 PWM 产生的信号可以从芯片的输出晶体管发射极或集电极输出,经电流放大提供Q1基极驱动。但不管从那一点-发射极还是集电极-输出,必须保证当U o 增加,要引起t on 减少,即负反馈。 应当注意,大多数PWM 芯片的输出晶 体管导通时间是t0到t1。对于这样的芯片,U s 送到EA 的反相输入端,PWM 信号如果驱动功率NPN 晶体管基极(N 沟道MOSFET 的栅极),则芯片输出晶体管应由发射极输出。 然而,在某些PWM 芯片(TL494)中,它们的导通时间是三角波U t 与直流电平(U ea )相交时间 图6.31 典型的正激变换器闭环控制