第四章 4.2.3 直线与圆的方程的应用
4.2.3 直线与圆的方程的应用 学习目标 1.理解直线与圆的位置关系的几何性质;2.会建立平面直角坐标系,利用直线与圆的位置关系及圆与圆的位置关系解决一些实际问题;3.会用“数形结合”的数学思想解决问题. 知识点 坐标法解决几何问题的步骤 用坐标法解决平面几何问题的“三步曲”: 第一步:建立适当的平面直角坐标系,用坐标和方程表示 问题中的几何元素,将平面几何问题转化为代数问题; 第二步:通过代数运算,解决代数问题; 第三步:把代数运算结果“翻译”成几何结论 . 类型一 直线与圆的方程的应用 例1 某圆拱桥的水面跨度20 m ,拱高4 m .现有一船,宽10 m ,水面以上高3 m ,这条船能否从桥下通过? 解 建立如图所示的坐标系. 依题意,有A (-10,0),B (10,0),P (0,4),D (-5,0),E (5,0). 设所求圆的方程是(x -a )2+(y -b )2=r 2, 于是有???? ? (a +10)2+b 2=r 2, (a -10)2 +b 2 =r 2 , a 2 +(b -4)2 =r 2 . 解此方程组,得a =0,b =-10.5,r =14.5. 所以这座圆拱桥的拱圆的方程是
x2+(y+10.5)2=14.52(0≤y≤4). 把点D的横坐标x=-5代入上式,得y≈3.1. 由于船在水面以上高3 m,3<3.1, 所以该船可以从桥下通过. 反思与感悟解决直线与圆的实际应用题的步骤: (1)审题:从题目中抽象出几何模型,明确已知和未知; (2)建系:建立适当的直角坐标系,用坐标和方程表示几何模型中的基本元素; (3)求解:利用直线与圆的有关知识求出未知; (4)还原:将运算结果还原到实际问题中去. 跟踪训练1如图,一座圆拱桥的截面图,当水面在某位置时,拱顶离水面2 m,水面宽12 m,当水面下降1 m后,水面宽为________米. 答案251 解析如图,以圆拱桥顶为坐标原点,以过圆拱顶点的竖直直线为y轴, 建立直角坐标系,设圆心为C,圆的方程设为x2+(y+r)2=r2,水面所在弦 的端点为A,B,则A(6,-2),将A(6,-2)代入圆的方程,得r=10,∴ 圆的方程为x2+(y+10)2=100.当水面下降1米后,可设点A′(x0,-3)(x0 >0),将A′(x0,-3)代入圆的方程,得x0=51,∴当水面下降1米后,水面宽为2x0=251米. 类型二坐标法证明几何问题 例2如图所示,在圆O上任取C点为圆心,作圆C与圆O的直径AB相切于D,圆C与圆O交于点E,F,且EF与CD相交于H,求证:EF平分CD.
拉格朗日方程的应用及举例08讲
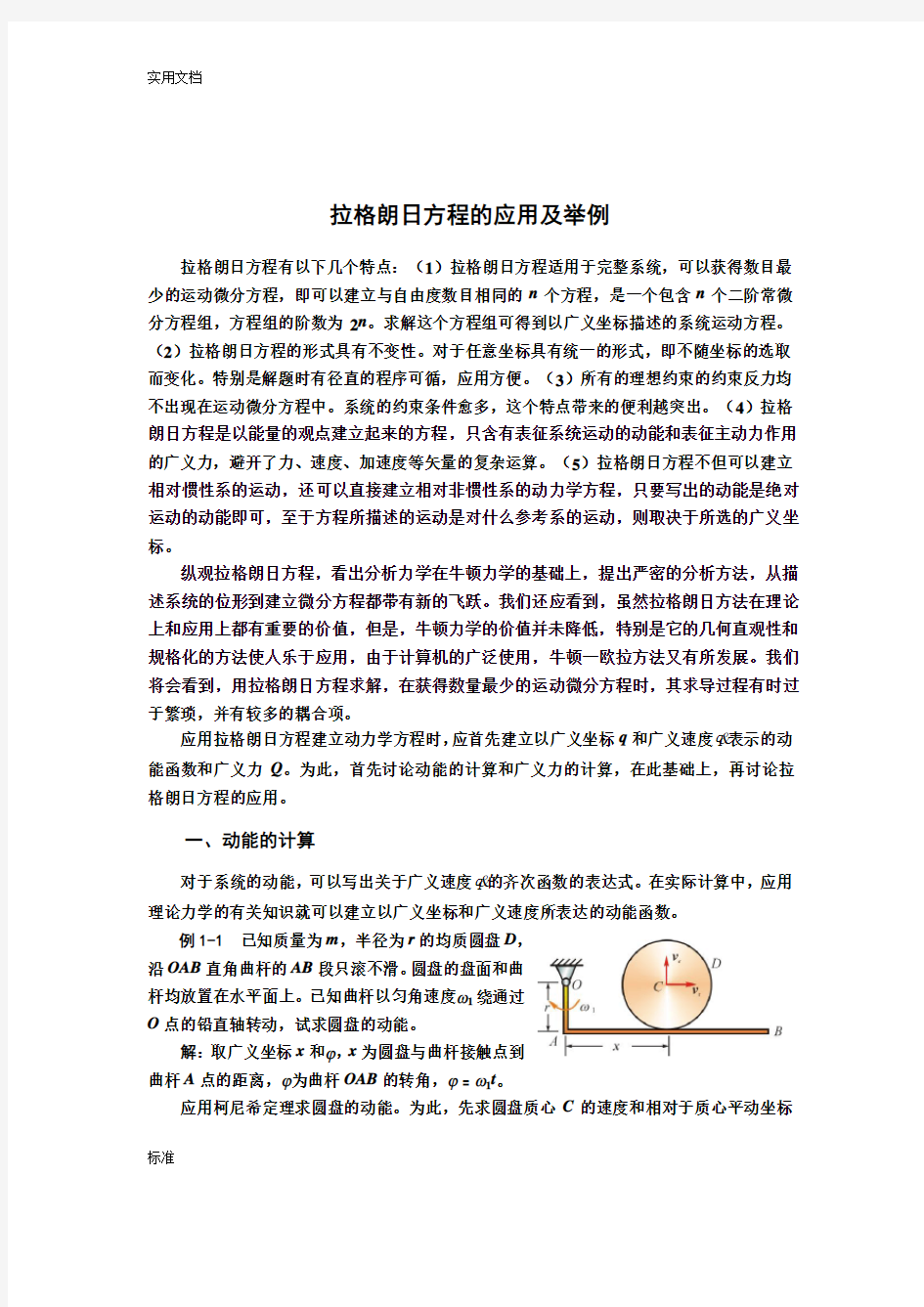
拉格朗日方程的应用及举例 拉格朗日方程有以下几个特点:(1)拉格朗日方程适用于完整系统,可以获得数目最少的运动微分方程,即可以建立与自由度数目相同的n个方程,是一个包含n个二阶常微分方程组,方程组的阶数为2n。求解这个方程组可得到以广义坐标描述的系统运动方程。(2)拉格朗日方程的形式具有不变性。对于任意坐标具有统一的形式,即不随坐标的选取而变化。特别是解题时有径直的程序可循,应用方便。(3)所有的理想约束的约束反力均不出现在运动微分方程中。系统的约束条件愈多,这个特点带来的便利越突出。(4)拉格朗日方程是以能量的观点建立起来的方程,只含有表征系统运动的动能和表征主动力作用的广义力,避开了力、速度、加速度等矢量的复杂运算。(5)拉格朗日方程不但可以建立相对惯性系的运动,还可以直接建立相对非惯性系的动力学方程,只要写出的动能是绝对运动的动能即可,至于方程所描述的运动是对什么参考系的运动,则取决于所选的广义坐标。 纵观拉格朗日方程,看出分析力学在牛顿力学的基础上,提出严密的分析方法,从描述系统的位形到建立微分方程都带有新的飞跃。我们还应看到,虽然拉格朗日方法在理论上和应用上都有重要的价值,但是,牛顿力学的价值并未降低,特别是它的几何直观性和规格化的方法使人乐于应用,由于计算机的广泛使用,牛顿一欧拉方法又有所发展。我们将会看到,用拉格朗日方程求解,在获得数量最少的运动微分方程时,其求导过程有时过于繁琐,并有较多的耦合项。 应用拉格朗日方程建立动力学方程时,应首先建立以广义坐标q和广义速度q 表示的动能函数和广义力Q。为此,首先讨论动能的计算和广义力的计算,在此基础上,再讨论拉格朗日方程的应用。 一、动能的计算 对于系统的动能,可以写出关于广义速度q 的齐次函数的表达式。在实际计算中,应用理论力学的有关知识就可以建立以广义坐标和广义速度所表达的动能函数。 例1-1 已知质量为m,半径为r的均质圆盘D, 沿OAB直角曲杆的AB段只滚不滑。圆盘的盘面和曲 杆均放置在水平面上。已知曲杆以匀角速度ω1绕通过 O点的铅直轴转动,试求圆盘的动能。 解:取广义坐标x和?,x为圆盘与曲杆接触点到 曲杆A点的距离,?为曲杆OAB的转角,? = ω1t。 应用柯尼希定理求圆盘的动能。为此,先求圆盘质心C的速度和相对于质心平动坐标- - 优质资料
线性规划的实际应用举例
线性规划的实际应用举例 即两为了便于同学们掌握线性规划的一般理论和方法,本文拟就简单的线性规划( 的实际应用举例加以说明。个变量的线性规划) 1 物资调运中的线性规划问题 万个40万个和30万个,由于抗洪抢险的需要,现需调运1 A,B两仓库各有编织袋50例/元万个、180/万个到乙地。已知从A仓库调运到甲、乙两地的运费分别为120元到甲地,20元/万个。问如何调运,能150/万个、万个;从B仓库调运到甲、乙两地的运费分别为100元? ?总运费的最小值是多少使总运费最小仓库调Bz元。那么需从x万个到甲地,y万个到乙地,总运费记为解:设从A仓库调运40-x万个到甲 地,调运运万个到乙地。20-y 从而有 。z=120x+180y+100(40-x)+150·(20-y)=20x+30y+7000 1)(图,即可行域。作出以上不等式组所表示的平面区域 z'=z-7000=20x+30y. 令 :20x+30y=0,作直线l 且与原点距离最小,0),,l的位置时,直线经过可行域上的点M(30l把直线向右上方平移至l y=0时,即x=30,亦取得最小值,取得最小值,从而z=z'+7000=20x+30y+7000z'=20x+30y 元)。30+30×z=20× 0+7000=7600(min 万个到乙地,可使总万个到甲地,20B30万个到甲地,从仓库调运10A答:从仓库调运元。运费最小,且总运费的最小值为7600 2 产品安排中的线性规划问题 吨,麦麸0.4吨需耗玉米某饲料厂生产甲、乙两种品牌的饲料,已知生产甲种饲料2例1O.4
吨,其余添加剂0.2. 吨甲种1吨,其余添加剂0.2吨。每吨;生产乙种饲料1吨需耗玉米0.5吨,麦麸0.3元。可供饲料厂生产的玉米供应500元,每1吨乙种饲料的利润是饲料的利润是400吨。问甲、乙300吨,麦麸供应量不超过500吨,添加剂供应量不超过量不超过600 ? ?最大利润是多少两种饲料应各生产多少吨(取整数),能使利润总额达到最大 1。分析:将已知数据列成下表 2表1例表 元,那么吨、y吨,利润总额为z解:设生产甲、乙两种饲料分别为x z=400x+500y。 即可行域。(图2)作出以上不等式组所表示的平面区域 平行,所以线段l4x+5y=6000与。并把400x+500y=0l向右上方平移,由于l:作直线l:1。,N(0,1200)M(250MN上所有坐标都是整数的点(整点)都是最优解。易求得,1000) ,y=1000时,1000)取整点M(250,,即x=250 。元1000=600000()=60(万元)=400×z250+500×max 吨,能使利润总额达到最大。最大利润为1000可安排生产甲种饲料250吨,乙种饲料答:万元。60 使我们认识到最优解的个数还例2课本题中出现的线性规划问题大都有唯一的最优解。注:有其他可能,这里不再深入探究。
大学物理-一维定态薛定谔方程的应用
一维定态薛定谔方程 的应用 授课人: 物理科学与技术学院
势 阱 日常生活中的各种井(阱) 物理学中研究微观粒子运动状态时常用的模型,因其势能函数曲线的形状如同井而得名 水井 窨井 陷阱 U x O a U
() U x x O a ∞ ∞00()0 , x a U x x x a ≤≤?=?∞<>? 这是一个理想化的物理模型, 应用定态薛定谔方程求解波函数, 有利于进一步理解在微观系统中 能量量子化和概率密度等概念 这样的势能函数称为 一维无限深势阱
建立定态薛定谔方程并求解 假设微观粒子质量为 ,由 m 22 2d ()()()2d U x x E x m x ψψ??-+=???? x a U x 0()0≤≤=阱内( ) : 22 2d ()()2d x E x m x ψψ-= x x a U x 0 , ()<>→∞ 阱外( ): 令: 2 22mE k =得通解: ()sin() x A kx ψ?=+ 微观粒子的能量不可能达到 无穷大,所以粒子不可能在阱外出现,或者说粒子在阱外出现的概率为零。 ()0 x ψ≡222 d 0d k x ψψ+=
利用标准条件确定 和 k ?因 在整个 轴上必须连续 x ()x ψsin() 0()0 0 0 A kx x a x x x ?ψ+≤≤?=? <>?,(0)sin 0 A ψ?== a A ka ()sin()0 ψ?=+=求归一化的波函数 一维无限深势阱中 微观粒子的波函数 2220π()d sin d a n x x A x x a ψ+∞-∞=??221 A a =?= 2A a = n a x x a x a x x a π2sin 0()00 , ψ? ≤≤?=??<>?() π ()sin 1,2,3n x A x n a ψ==??, 0?=π n k a =()1,2,3n =???,
拉格朗日方程的应用及举例08讲
1 应用柯尼希定理求圆盘的动能。为此,先求圆盘质心 C 的速度和相对于质心平动坐标 拉格朗日方程的应用及举例 拉格朗日方程有以下几个特点:( 1)拉格朗日方程适用于完整系统,可以获得数目最 少的运动微分方程,即可以建立与自由度数目相同的 n 个方程,是一个包含 n 个二阶常微 分方程组,方程组的阶数为 2n 。求解这个方程组可得到以广义坐标描述的系统运动方程。 (2)拉格朗日方程的形式具有不变性。对于任意坐标具有统一的形式,即不随坐标的选取 而变化。特别是解题时有径直的程序可循,应用方便。( 3 )所有的理想约束的约束反力均 不出现在运动微分方程中。系统的约束条件愈多,这个特点带来的便利越突出。( 4)拉格 朗日方程是以能量的观点建立起来的方程,只含有表征系统运动的动能和表征主动力作用 的广义力,避开了力、速度、加速度等矢量的复杂运算。( 5)拉格朗日方程不但可以建立 相对惯性系的运动,还可以直接建立相对非惯性系的动力学方程,只要写出的动能是绝对 运动的动能即可,至于方程所描述的运动是对什么参考系的运动,则取决于所选的广义坐 标。 纵观拉格朗日方程,看出分析力学在牛顿力学的基础上,提出严密的分析方法,从描 述系统的位形到建立微分方程都带有新的飞跃。我们还应看到,虽然拉格朗日方法在理论 上和应用上都有重要的价值,但是,牛顿力学的价值并未降低,特别是它的几何直观性和 规格化的方法使人乐于应用,由于计算机的广泛使用,牛顿一欧拉方法又有所发展。我们 将会看到,用拉格朗日方程求解,在获得数量最少的运动微分方程时,其求导过程有时过 于繁琐,并有较多的耦合项。 应用拉格朗日方程建立动力学方程时, 应首先建立以广义坐标 q 和广义速度q 表示的动 能函数和广义力 Q 。为此,首先讨论动能的计算和广义力的计算,在此基础上,再讨论拉 格朗日方程的应用。 、动能的计算 对于系统的动能,可以写出关于广义速度 q 的齐次函数的表达式。在实际计算中,应用 理论力学的有关知识就可以建立以广义坐标和广义速度所表达的动能函数。 例1-1 已知质量为m ,半径为r 的均质圆盘D , 沿OAB 直角曲杆的 AB 段只滚不滑。圆盘的盘面和曲 杆均放置在水平面上。已知曲杆以匀角速度-'1绕通过 O 点的铅直轴转动,试求圆盘的动能。 解:取广义坐标x 和;:,x 为圆盘与曲杆接触点到 曲杆A 点的距离,:为曲杆OAB 的转角,:=rt 。 B
(完整word版)拉格朗日方程的应用及举例08讲
1 拉格朗日方程的应用及举例 拉格朗日方程有以下几个特点:(1)拉格朗日方程适用于完整系统,可以获得数目最少的运动微分方程,即可以建立与自由度数目相同的n 个方程,是一个包含n 个二阶常微分方程组,方程组的阶数为2n 。求解这个方程组可得到以广义坐标描述的系统运动方程。(2)拉格朗日方程的形式具有不变性。对于任意坐标具有统一的形式,即不随坐标的选取而变化。特别是解题时有径直的程序可循,应用方便。(3)所有的理想约束的约束反力均不出现在运动微分方程中。系统的约束条件愈多,这个特点带来的便利越突出。(4)拉格朗日方程是以能量的观点建立起来的方程,只含有表征系统运动的动能和表征主动力作用的广义力,避开了力、速度、加速度等矢量的复杂运算。(5)拉格朗日方程不但可以建立相对惯性系的运动,还可以直接建立相对非惯性系的动力学方程,只要写出的动能是绝对运动的动能即可,至于方程所描述的运动是对什么参考系的运动,则取决于所选的广义坐标。 纵观拉格朗日方程,看出分析力学在牛顿力学的基础上,提出严密的分析方法,从描述系统的位形到建立微分方程都带有新的飞跃。我们还应看到,虽然拉格朗日方法在理论上和应用上都有重要的价值,但是,牛顿力学的价值并未降低,特别是它的几何直观性和规格化的方法使人乐于应用,由于计算机的广泛使用,牛顿一欧拉方法又有所发展。我们将会看到,用拉格朗日方程求解,在获得数量最少的运动微分方程时,其求导过程有时过于繁琐,并有较多的耦合项。 应用拉格朗日方程建立动力学方程时,应首先建立以广义坐标q 和广义速度q 表示的动能函数和广义力Q 。为此,首先讨论动能的计算和广义力的计算,在此基础上,再讨论拉格朗日方程的应用。 一、动能的计算 对于系统的动能,可以写出关于广义速度q 的齐次函数的表达式。在实际计算中,应用理论力学的有关知识就可以建立以广义坐标和广义速度所表达的动能函数。 例1-1 已知质量为m ,半径为r 的均质圆盘D ,沿OAB 直角曲杆的AB 段只滚不滑。圆盘的盘面和曲杆均放置在水平面上。已知曲杆以匀角速度ω1绕通过O 点的铅直轴转动,试求圆盘的动能。 解:取广义坐标x 和?,x 为圆盘与曲杆接触点到曲杆A 点的距离,?为曲杆OAB 的转角,? = ω1t 。 应用柯尼希定理求圆盘的动能。为此,先求圆盘质心C 的速度和相对于质心平动坐标
线性规划模型在生活中的实际应用
线性规划模型在生活中的实际应用 一、线性规划的基本概念 线性规划是运筹学中研究较早、发展较快、应用广泛、方法较成熟的一个重要分支,它是辅助人们进行科学管理的一种数学方法.在经济管理、交通运输、工农业生产等经济活动中,提高经济效果是人们不可缺少的要求,而提高经济效果一般通过两种途径:一是技术方面的改进,例如改善生产工艺,使用新设备和新型原材料.二是生产组织与计划的改进,即合理安排人力物力资源.线性规划所研究的是:在一定条件下,合理安排人力物力等资源,使经济效果达到最好.一般地,求线性目标函数在线性约束条件下的最大值或最小值的问题,统称为线性规划问题.满足线性约束条件的解叫做可行解,由所有可行解组成的集合叫做可行域.决策变量、约束条件、目标函数是线性规划的三要素. 二、线性规划模型在实际问题中的应用 (1)线性规划在企业管理中的应用范围 线性规划在企业管理中的应用广泛,主要有以下八种形式: 1.产品生产计划:合理利用人力、物力、财力等,是获利最大. 2.劳动力安排:用最少的劳动力来满足工作的需要. 3.运输问题:如何制定运输方案,使总运费最少. 4.合理利用线材问题:如何下料,使用料最少. 5.配料问题:在原料供应的限制下如何获得最大利润. 6.投资问题:从投资项目中选取方案,是投资回报最大. 7.库存问题:在市场需求和生产实际之间,如何控制库存量从而获得更高利益. 8.最有经济计划问题:在投资和生产计划中如何是风险最小 . (2)如何实现线性规划在企业管理中的应用 在线性规划应用前要建立经济与金融体系的评价标准及企业的计量体系,摸清企业的资
源.首先通过建网、建库、查询、数据采集、文件转换等,把整个系统的各有关部分的特征进行量化,建立数学模型,即把组成系统的有关因素与系统目标的关系,用数学关系和逻辑关系描述出来,然后白较好的数学模型编制成计算机语言,输入数据,进行计算,不同参数获取的不同结果与实际进行分析对比,进行定量,定性分析,最终作出决策.
直线与圆的方程的应用
4.2.3 直线与圆的方程的应用 学习目标 1.理解直线与圆的位置关系的几何性质.2.会建立平面直角坐标系,利用直线与圆的位置关系及圆与圆的位置关系解决一些实际问题.3.会用“数形结合”的数学思想解决问题. 知识点 坐标法解决几何问题的步骤 用坐标方法解决平面几何问题的“三步曲”: 第一步:建立适当的平面直角坐标系,用坐标和方程表示 问题中的几何元素,将平面几何问题转化为代数问题; 第二步:通过代数运算,解决代数问题; 第三步:把代数运算结果“翻译”成几何结论. 类型一 直线与圆的方程的应用 例1 某圆拱桥的圆拱跨度为20 m ,拱高为4 m .现有一船,宽10 m ,水面以上高3 m ,这条船能否从桥下通过? 解 建立如图所示的坐标系.依题意,有A (-10,0),B (10,0), P (0,4),D (-5,0),E (5,0). 设所求圆的方程是 (x -a )2+(y -b )2=r 2(r >0), 于是有???? ? (a +10)2+b 2=r 2,(a -10)2+b 2=r 2, a 2+( b -4)2=r 2, 解此方程组,得a =0,b =-10.5,r =14.5, 所以这座圆拱桥的拱圆的方程是 x 2+(y +10.5)2=14.52(0≤y ≤4). 把点D 的横坐标x =-5代入上式,得y ≈3.1. 由于船在水面以上高3 m,3<3.1,
所以该船可以从桥下通过. 反思与感悟解决直线与圆的实际应用题的步骤 (1)审题:从题目中抽象出几何模型,明确已知和未知. (2)建系:建立适当的直角坐标系,用坐标和方程表示几何模型中的基本元素. (3)求解:利用直线与圆的有关知识求出未知. (4)还原:将运算结果还原到实际问题中去. 跟踪训练1如图为一座圆拱桥的截面图,当水面在某位置时,拱顶离水面2 m,水面宽12 m,当水面下降1 m后,水面宽为________米. 答案251 解析如图,以圆拱桥顶为坐标原点,以过圆拱顶点的竖直直线为y轴,建立直角坐标系. 设圆心为C,圆的方程设为x2+(y+r)2=r2(r>0),水面所在弦的端点为A,B,则A(6,-2).将A(6,-2)代入圆的方程,得r=10, ∴圆的方程为x2+(y+10)2=100.当水面下降1米后,可设点A′(x0,-3)(x0>0),将A′(x0,-3)代入圆的方程,得x0=51, ∴当水面下降1米后,水面宽为2x0=251(米). 类型二坐标法证明几何问题 例2如图所示,在圆O上任取C点为圆心,作圆C与圆O的直径AB相切于点D,圆C与圆O交于点E,F,且EF与CD相交于H,求证:EF平分CD. 证明以AB所在直线为x轴, O为坐标原点,建立直角坐标系, 如图所示,设|AB|=2r,D(a,0),
线性规划的实际应用
密封线 线性规划的实际应用 摘要线性规划模型是科学与工程领域广泛应用的数学模型。本文应用线性规划模型,以 某水库输水管的选择为研究对象,以实现输水管的选择既能保证供水,又能使造价最低为 目标,根据水库的特点和实际运行情况,分析了其输水管选择过程中线性规划模型的建立 方法,并分别通过单纯形法和MATLAB软件进行求解。 关键词线性规划模型单纯形法 MATLAB 一、专著背景简介 《最优化方法》介绍最优化模型的理论与计算方法,其中理论包括对偶理论、非线性规划的最优性理论、非线性半定规划的最优性理论、非线性二阶锥优化的最优性理论;计算方法包括无约束优化的线搜索方法、线性规划的单纯形方法和内点方法、非线性规划的序列二次规划方法、非线性规划的增广Lagrange方法、非线性半定规划的增广Lagrange方法、非线性二阶锥优化的增广Lagrange方法以及整数规划的Lagrange松弛方法。《最优化方法》注重知识的准确性、系统性和算法论述的完整性,是学习最优化方法的一本入门书。 最优化方法(也称做运筹学方法)是近几十年形成的,它主要运用数学方法研究各种系统的优化途径及方案,为决策者提供科学决策的依据。最优化方法的主要研究对象是各种有组织系统的管理问题及其生产经营活动。最优化方法的目的在于针对所研究的系统,求得一个合理运用人力、物力和财力的最佳方案,发挥和提高系统的效能及效益,最终达到系统的最优目标。实践表明,随着科学技术的日益进步和生产经营的日益发展,最优化方法已成为现代管理科学的重要理论基础和不可缺少的方法,被人们广泛地应用到公共管理、经济管理、工程建设、国防等各个领域,发挥着越来越重要的作用。本章将介绍最优化方法的研究对象、特点,以及最优化方法模型的建立和模型的分析、求解、应用。主要是线性规划问题的模型、求解(线性规划问题的单纯形解法)及其应用-运输问题;以及动态规划的模型、求解、应用-资源分配问题。 二、专著的主要结构内容 《最优化方法》是一本着重实际应用又有一定理论深度的最优化方法教材,内容包括线
固体物理学 1-5-薛定谔方程应用举例II
薛定谔方程应用举例II---原子系统
? 氢原子 ? 电子自旋 ? 多电子原子
1
氢原子的定态薛定谔方程
?原子由一个原子核和核外电子构成,属于多粒子体系。多粒 子体系的总能量等于每一个粒子的能量与粒子间相互作用能量 之和。
?氢原子包括一个原子核和电子,库仑场是各向同性的,哈密 顿量可记作(绝热近似):
H?
=
?
h2 2me
?2
+
qeU(r)
me为电子质量,qe是电子电荷。U(r)为原子核静电场中的库 仑势,记作:
U(r) = ? Zqe = ? Z h2
4πε0r a1meqer
Z为核的电荷数,a1 = 4πε0?2/(meqe2) = 0.529?,为氢原子的第
一波尔轨道半径。
2
??? ?
h2 2me
?2
?
Zh 2 a1meqer
??ψ
?
(r)
=
E
?ψ
(r)
中心力场问题,采用球坐标,薛定谔方程为:
? ?? ??
h2 2me
?
????
1 r2
? ?r
r2
? ?r
?
L?2 r2
???? ?
Zh2
?
?ψ (r,?,θ ) =
a1mer ??
E ?ψ (r,?,θ )
用分离变量法求解,令:
ψ (r,θ ,φ) = R(r) ?Y (?,θ )
分别求解径向波函数R(r)和角向波函数Y(?,θ)。
3
直线与圆的方程的应用理解练习知识题
4.2.3 直线与圆的方程的应用 练习一 一、 选择题 1、ABC ?的顶点A 的坐标为(3,-1),AB 边上的中线所在直线方程为08=-+y x ,直线L :012=+-y x 是过点B 的一条直线,则AB 的中点D 到直线L 的距离是( ) A 、 55 2 B 、 55 3 C 、 55 4 D 、5 2、两直线l 1:mx-y+n=0和l 2:nx-y+m=0在同一坐标系中,则正确的图形可能是( ) A B C D 3、已知点A(-7,1),B(-5,5),直线:y=2x-5,P 为上的一点,使|PA |+|PB |最小时P 的坐标为 ( ) (A) (2,-1) (B) (3,-2) (C) (1,-3) (D) (4,-3) 4、如果点A(1,2),B(3,1),C(2,3)到直线x=my 的距离平方和取最大值,那么m 的值等于 ( ) (A) 0 (B) -1 (C) 1 (D) 2 5、已知直线b x y += 2 1 与x 轴、y 轴的交点分别为A ,B ,如果△AOB 的面积(O 为原点)小于等于1,那么b 的取值范围是 ( ) (A) b ≥ -1 (B )b ≤1且0≠b (C) -1 ≤b ≤1 且0≠b (D) b ≤-1或b ≥1 6、通过点M (1,1)的直线与坐标轴所围成的三角形面积等于3,这样的直线共有
( ) (A)1条 (B)2条 (C)3条 (D)4条 7、点P (x,y )在直线x+2y+1=0上移动,函数f(x,y)=2x +4y 的最小值是 ( ) (A) 2 2 (B) 2 (C)22 (D)42 8、已知两点O(0,0) , A(4,-1)到直线mx+m 2y+6=0的距离相等, 则实数m 可取的不同值共有 ( ) (A) 1个 (B) 2个 (C) 3个 (D) 4个 二、填空题 9、菱形ABCD 的相对两个顶点是B(1,3),D(0,4),如果∠BAD=60o ,那么顶点A 和C 的坐标是________. 10、与直线3x+4y-7=0平行,且和两轴围成的三角形面积等于24的直线方程是_____ 11、如果对任何实数k ,直线(3+k)x +(1-2k)y +1+5k=0都过一个定点A ,那么A 的坐标是______。 12、已知y 轴上有一点P ,它与点(-3、1)连成的直线的倾斜角为1200,则点P 的坐标为 三、解答题 13、求与直线0534=+-y x 垂直,且与两坐标轴围成的三角形周长为10的直线的方程. 14、、已知圆0242 2 =++-+m y x y x 与y 轴交于A 、B 两点,圆心为P ,若?=∠90APB 。 求m 的值。 15、已知定点)0,2(A ,点在圆12 2 =+y x 上运动,AOP ∠的平分线交PA 于Q 点,其中O 为坐标原点, 求Q 点的轨迹方程.
运用Matlab进行线性规划求解实例
8.2 线性规划 线性规划是处理线性目标函数和线性约束的一种较为成熟的方法,目前已经广泛应用于军事、经济、工业、农业、教育、商业和社会科学等许多方面。 8.2.1 基本数学原理 线性规划问题的标准形式是: ????? ??????≥=+++=+++=++++++=0,,,min 21221122222121112 121112211n m n mn m m n n n n n n x x x b x a x a x a b x a x a x a b x a x a x a x c x c x c z ΛΛΛΛΛΛΛΛΛΛΛΛΛΛΛΛΛ 或 ???? ?????=≥===∑∑==n j x m i b x a x c z j n j i j ij n j j j ,,2,1,0,,2,1,min 1 1ΛΛ 写成矩阵形式为: ?? ???≥==O X b AX CX z min 线性规划的标准形式要求使目标函数最小化,约束条件取等式,变量b 非负。不符合这几个条件的线性模型可以转化成标准形式。 MATLAB 采用投影法求解线性规划问题,该方法是单纯形法的变种。 8.2.2 有关函数介绍 在MATLAB 工具箱中,可用linprog 函数求解线性规划问题。 linprog 函数的调用格式如下: ●x=linprog(f,A,b):求解问题minf'*x ,约束条件为A*x<=b 。 ●x=linprog(f,A,b,Aeq,beq):求解上面的问题,但增加等式约束,即Aeq*x=beq 。若没有不等式约束,则令A=[ ],b=[ ]。 ●x=linprog(f,A,b,Aeq,beq,lb,ub):定义设计x 的下界lb 和上界ub ,使得x 始终在该范围内。若没有等式约束,令Aeq=[ ],beq=[ ]。 ●x=linprog(f,A,b,Aeq,beq,lb,ub,x0):设置初值为x0。该选项只适用于中型问题,默认时大型算法将忽略初值。 ●x=linprog(f,A,b,Aeq,beq,lb,ub,x0,options):用options 指定的优化参数进行最小化。 ●[x,fval]=linprog(…):返回解x 处的目标函数值fval 。 ●[x,lambda,exitflag]=linpro g(…):返回exitflag 值,描述函数计算的退出条件。 ●[x,lambda,exitflag,output]=linprog(…):返回包含优化信息的输出参数output 。 ●[x,fval,exitflag,output,lambda]=linprog(…):将解x 处的拉格朗日乘子返回到
圆系方程及其应用
圆系方程及其应用 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
圆系方程及其应用 一、常见的圆系方程有如下几种: 1、以(,)a b 为圆心的同心圆系方程:222()()(0)x a y b λλ-+-=> 与圆22y x ++Dx +Ey +F=0同心的圆系方程为:22y x ++Dx +Ey +λ=0 2、过直线Ax +By +C=0与圆22y x ++Dx +Ey +F=0交点的圆系方程为:22y x ++Dx +Ey +F+λ(Ax +By +C)=0(λ∈R) 3、过两圆1C :22y x ++111F y E x D ++=0,2C :22y x ++222F y E x D ++=0交点的圆系方程为: 22y x ++111F y E x D +++λ(22y x ++222F y E x D ++)=0(λ≠-1,此圆系不含2C :22y x ++222F y E x D ++=0) 特别地,当λ=-1时,上述方程为根轴方程.两圆相交时,表示公共弦方程;两圆相切时,表示公切线方程. 注:为了避免利用上述圆系方程时讨论圆2C ,可等价转化为过圆1C 和两圆公共弦所在直线交点的圆系方程:22111121212[()()()]0x y D x E y F D D x E E y F F λ+++++-+-+-= 二、圆系方程在解题中的应用: 1、利用圆系方程求圆的方程: 例1 求经过两圆x 2+y 2+6x -4=0和x 2+y 2+6y -28=0的交点,并且圆心在直线x -y -4=0上的圆的方程。 解一:求出两交点(-1,3)(-6,-2),再用待定系数法:1.用一般式; 2.用标准式。 (注:标准式中可先求圆心的两个坐标,而圆心正好在两交点的中垂线上。) 解二:用两点的中垂线与直线的交点得圆心: 1.两交点的中垂线与直线相交;
圆系方程的应用及要点
圆系方程的应用及要点 1. 引子 题: 求经过两条曲线x 2+y 2+3x -y=0和3x 2+3y 2+2x+y=0交点的直线方程. 常规解法是: 联立方程 ?????=+++=-++)2(0233)1(032222y x y x y x y x 求方程组解 )3(047) 2(3)1(=--?y x 得 得代入即),1(,4 7x y = .137134;00313 4,0,0473164922112122???????-=-=???==-===-++ y x y x x x x x x x ),得分别代入(解得 即两交点坐标为 A(0,0), ).13 7,134(--B 过两交点的直线方程为 7x -4y=0. (4) 观察分析以上解题过程,可发现所得结果(4)与中间状态(3)是一样的.这个是不是普遍规律,本质是什么? 2. 曲线系方程 由上面(1),(2)得到(3),这是解方程的基本步骤,这一步的几何意义是什么呢?我们可得以下结论 结论1: 如果两条曲线方程是 f 1(x,y)=0 和 f 2(x,y)=0, 它们的交点是P(x 0,y 0),则 方程 f 1(x,y)+λf 2(x,y)=0的曲线也经过P(x 0,y 0) (是任意常数). 此结论即由联立方程???==)6(0),()5(0 ),(21y x f y x f 得到 )7(0),(),(21=+y x f y x f λ 只须将(x 0,y 0)代入(7),可立即证明。 有了这个结论,有些题目可快速求解。过两圆交点的公共弦所在直线方程就是将两圆方程联立消去二次项所得方程。 例2 (课本P70.13题) 求经过两圆x 2+y 2+6x -4=0和x 2+y 2+6y -28=0的交点,并且圆心在直线x -y -4=0上的圆的方程. 解: 构造方程 x 2+y 2+6x -4+λ(x 2+y 2+6y -28)=0 即 (1+λ)x 2+(1+λ)y 2+6x+6λy -(4+28λ)=0 此方程的曲线是过已知两圆交点的圆,且圆心为)13,13(λλλ+-+- 当该圆心在直线x -y -4=0上时,即 .7,041313-==-+++-λλ λλ得 ∴ 所求圆方程为 x 2+y 2-x+7y -32=0
§16.3 一维定态薛定谔方程的建立和求解举例
§16.3 一维定态薛定谔方程的建立和求解举例 (一)一维运动自由粒子的薛定谔方程 波函数随时间和空间而变化的基本方程,是薛定谔于1926年提出的,称为薛定谔波动方程,简称波动方程或薛定谔方程,它成为量子力学的基本方程. 将(16.2.14)式分别对t 和x 求导,然后从这两式消去E 、p 、和ψ,便可得到一维运动自由粒子的薛定谔方程: ψ-=?ψ?)/iE (t 即ψ=?ψ?E t i (16.3.1) ψ=?ψ ?22)/ip (x 2 ψ=ψ ?-2222p ????? ?????<<的薛定谔方程自由粒子轴运动的沿)c x (v 方程(16.3.3)中不含有能量E 和动量p ,表明此方程是不受E 和p 的数值限制的普遍方程. 请同学们自己试一试,如果上述波函数不用复数表式(16.2.14),改用类似于(16.2.1)式的余弦函数或正弦函数表式,就不会得到合乎要求的薛定谔方程(16.3.3)式?. 这薛定谔方程不是根据直接实验结果归纳而得,也不是由经典波动理论或其他理论推导出来的,它是在物质波假设的基础上,参照经典波动方程而建立起来的.薛定谔方程在微观领域中得到广泛的应用,它推导出来的结果,都与相关实验结果符合得很好,这才是薛定谔方程正确反映微观领域客观规律的最有力的证明. (二)一维运动自由粒子的定态薛定谔方程?? 上述薛定谔方程(16.3.3)是偏微分方程,从此方程可解出波函数ψ(x ,t ).在量子力学中最重要的解,是可把波函数ψ(x,t )分离成空间部分u (x )和时间部分f (t )两函数的乘积的特解,即 〔一维运动自由粒子的定态波函数〕 ψ(x,t )=u (x )f (t )(16.3.4) 将此式代入(16.3.3)式得: 22 2dx u d )t (f )m 2/(dt df )x (u i -= 两边除以ψ=uf 得: 22 2dx u d u 1)m 2/(dt df f 1i -= 此式左边是时间t 的函数,右边是坐标x 的函数.已知t 与x 是互相独立的自变量,左右两边相等,必须是两边都等于同一常量E ,即 ? 郭敦仁《量子力学初步》16—17页,人民教育出版社1978年版. ? 郭敦仁《量子力学初步》21—22页,人民教育出版社1978年版. ? 周世勋编《量子力学》32—33页,上海科学技术出版社1961年版.
§16.2 薛定谔方程对氢原子的应用
(16.4.4) (16.4.5) (图16.4a )球极坐标 薛定谔方程对氢原子的应用 (一)氢原子的薛定谔方程 前一节讨论一维运动自由粒子的薛定谔方程及其定态解.本节要讨论氢原子中电子的运动,这与前一节有两点不同: (1)氢原子电子作三维空间运动,因此,薛定谔方程(16.3.3)中的波函数ψ(x,t )应换成ψ(x,y,z,t ) 或ψ(r ,t ),而2 2 x ?? 应换成=??+??+??2 2 22 22 z y x ▽2.此▽2称为拉普拉斯算符或拉氏算符. ???? ??<<的薛定谔方程 三维运动自由粒子)c (v 222222222z y x )m 2/(t i ??+??+??=?=?ψ?-=?ψ? (16.4.1) (2)氢原子的电子不是自由粒子,它受到氢核的库仑力,此力的作用可用它们的电势能E p 表示.因此,氢原子电子的薛定谔方程可表示如下 ?? ,见〔附录16D 〕. ??? ???<<的薛定谔方程氢原子电子)c (v p 2p k p 2 2E )m 2/p (E E E E )m 2/(t i +=+=ψ+ψ?-=?ψ? (16.4.2) *(二)氢原子的定态薛定谔方程 定态解是解决氢原子各种问题的基础.参照(16.3.4)至(16.3.6)式,可把(16.4.2)式中的波函数ψ(r ,t )分离为空间部分u (r )和时间部分f (t ),并参照(16.3.10)式写出氢原子的定态薛定谔方程,见〔附录16E 〕. ψ(r ,t )=u (r )f (t ), f (t )=C /iEt e - (16.4.3) ??????<<的定态薛定谔方程氢原子电子)c (v r 4e E 0u )E E )(/m 2(u 02p p 2 2 πε-==-+? 氢核的质量比电子的大得多,可认为氢核不动,电子绕核转动.其电势能可表成E p =-e 2/4πε0r .此势能E p 只与电子至氢核的距离r 有关,而与方向无关,即具有球对称性,应用球极坐标较为方便.如(图16.4a ),O 表氢核,e 表电子,r 为e 至O 的距离.θ为r 与z 轴的夹角,θ称天顶角或极角.?为r 在xOy 平面的投影与x 轴的夹角.故有 x=rsin θcos ?; y=rsin θsin ?; z=rcos θ (16.4.6) 拉氏算符 2 2 22222 z y x ??+??+??=? 改用球坐标(r,θ,?)表示如下:?? ()() 2 2 222222sin r 1sin sin r 1r r r r 1???θ+θ??θθ??θ+????=?(16.4.7) 将此▽2算符代入(16.4.4)式,便得到以球坐标表示的氢原子定态薛定谔方程. ? 郭敦仁《量子力学初步》18—19,34—35页,1978年版. ? 程守洙、江之永编,王志符、朱讠永春等修订《普通物理学》第3册177—180页,1982年修订本. ? 郭敦仁《量子力学初步》35—45页,1978年版.