
微机械陀螺仪的温度误差分析和模型研究
摘要:微机械陀螺仪是一种用于测量物体运动角速度的新型惯性器件。这种新型陀螺仪具有体积小、重量轻、可靠性高、抗冲击、易于数字化和智能化、能大批量生产等优点,是未来惯性技术向民用领域大量推广应用最有前途的仪表。但环境温度是对其性能有重大影响。本文主要对微机械陀螺仪的温度误差原因进行分析,并对现有温度误差分析补偿模型进行了介绍。
关键词:微机械陀螺仪;温度误差;灰色模型;最小二乘法;小波网络法
The research on error analysis and model of microelectron-mechanical
gyroscope
(College of Aerospace Engineering, Nanjing University of Aeronautics &Astronautics, Nanjing, 210016, China) Abstract:Micro mechanical gyroscope is a new inertial component, which is used for measuring the velocity object movement. This new type of gyroscope has characteristics such as small size, light weight, high reliability, impact resistant, easy to digital and intelligent, and mass production, so it is the future technology to civil field large inertia popularization and application of the most promising instrument. But environmental temperature has a major impact on its performance. This paper mainly to analyz the micro mechanical inner temperature error reason, and the error analysis of existing temperature compensation models are introduced in this paper.
Key words:microelectron-mechanical gyroscope;temperature error;gray model;wavelet network
陀螺仪又称角速度计,可以用来检测旋转角速度和角度。传统的机械陀螺、精密光线陀螺和激光陀螺等已在航空航天等军事领域得到广泛应用。但是无论从尺寸还是成本上,都不能满足微型武器的应用要求[1]。近年来,随着半导体技术集成电路微细加工技术的迅速发展,MEMS(Micro-Electro-Mechanical System)惯性器件得到快速发展,微机械陀螺仪也得到快速发展,它具有体积小,抗冲击,可靠性高,寿命长,成本低等特点,在军事和民用等领域应用前景广阔[2]。据各国研究成果表明,随着器件精度的不断提高,微机械陀螺仪技术必将在未来的军用及民用的相关领域中发挥越来越重要的作用[3]。但是由于性能限制,MEMS陀螺主用于中低精度导航。在微机械陀螺中的众多误差因素中,环境温度的影响是不可忽视的。因此对微机械陀螺仪的温度特性进行分析,并进行温度误差的建模和补偿是提高精度的有效手段,也是当前MEMS陀螺研究的热点之一。
1.微机械陀螺仪的温度误差分析
微机械陀螺仪的精度是决定惯性系统精度的核心因素,陀螺仪的精度较低,对姿态测量系统的动态性能影响很大。由于其对温度敏感度大,温度漂移成为其主要的误差源之一。首先分析微机械陀螺仪的工作原理,然后分析温度对微机械陀螺仪的影响。
1.1微机械陀螺仪的工作原理
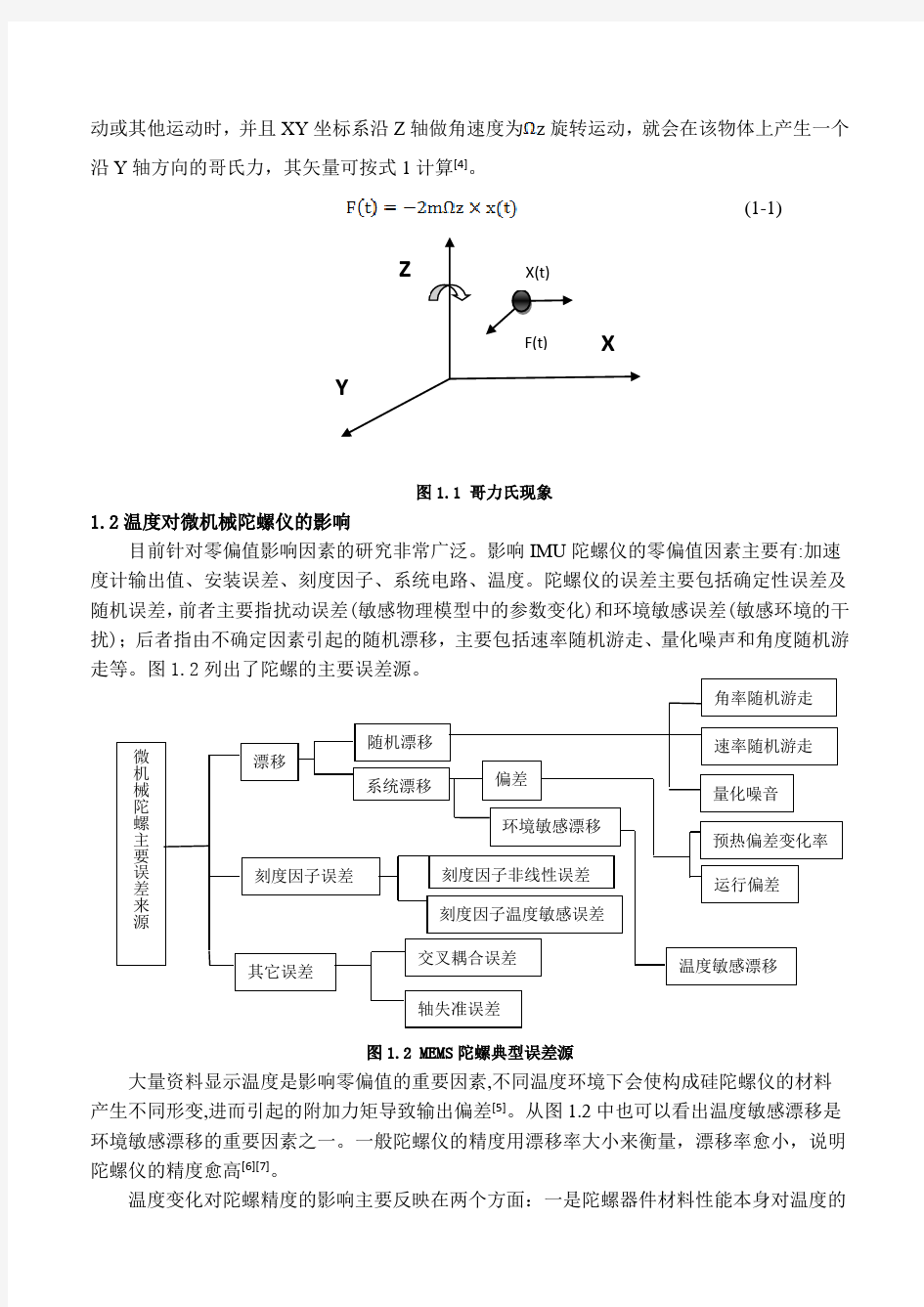
微机械陀螺仪利用了哥氏力现象,其原理如图1.1所示。图中的物体沿X轴做周期性振
动或其他运动时,并且XY坐标系沿Z 轴做角速度为z旋转运动,就会在该物体上产生一个沿Y轴方向的哥氏力,其矢量可按式1计算[4]。
(1-1) Array
图1.1 哥力氏现象
1.2温度对微机械陀螺仪的影响
目前针对零偏值影响因素的研究非常广泛。影响IMU陀螺仪的零偏值因素主要有:加速度计输出值、安装误差、刻度因子、系统电路、温度。陀螺仪的误差主要包括确定性误差及随机误差,前者主要指扰动误差(敏感物理模型中的参数变化)和环境敏感误差(敏感环境的干
扰);后者指由不确定因素引起的随机漂移,主要包括速率随机游走、量化噪声和角度随机游
图1.2 MEMS陀螺典型误差源
大量资料显示温度是影响零偏值的重要因素,不同温度环境下会使构成硅陀螺仪的材料
产生不同形变,进而引起的附加力矩导致输出偏差[5]。从图1.2中也可以看出温度敏感漂移是
环境敏感漂移的重要因素之一。一般陀螺仪的精度用漂移率大小来衡量,漂移率愈小,说明
陀螺仪的精度愈高[6][7]。
温度变化对陀螺精度的影响主要反映在两个方面:一是陀螺器件材料性能本身对温度的
敏感性;二是周围温度场对陀螺工作状态的影响[8]。为了提高精度、补偿温度漂移误差,必须进行必要的温控或温度补偿措施。目前国内外的研究措施如下:
①通过合理设计和改善陀螺结构,使陀螺器件的布局、零件的材料和结构形状,满足对温度不敏感的要求;
②通过采用合适的温控装置或温度控制使陀螺工作在一个恒定的温度环境内;
③通过热力学分析和试验研究的方法,辨识出陀螺的静、动态温度模型,并依此进行温度误差补偿。
2.微机械陀螺仪关于温度的模型
2.1基于灰色模型的温度漂移模型
2.1.1 灰色模型
用灰色微分拟合法建立GM(1,1)模型[9,10],它可用于定量预测和分析,被看作是灰色系统理论中的核心模型.其模型方程:
(2.1)
其中=,可由最小二乘估计得[11]:
(2.2)
(2.3)其模型方程的白微分方程为:
=b (2.4)其响应式为:
(k+1)=+ (2.5)
(k+1)= (2.6)
2.1.2 微机械温度漂移灰色模型
杨金显,袁赣南等人[12]在微机械温度试验的基础上,通过灰色模型对温度漂移进行了建模研究。温度测试数据如表2.1所示。
表 2.1温度漂移数据
温度/℃漂移/mV 温度/℃漂移/mV
-45 6 5 12
-35 7 10 12.6
-25 8.5 15 13.3
-15 10 25 14.5
-10 10.3 35 15.6
-5 10.7 45 16.9
0 11.2 60 18.4
是由原始漂移数据得到的数据序列,是累加得到的数据序列。
X= (2.7)
(2.8)
= (2.9) 其响应模式为:
(2.10)最后对作还原处理,得到的拟合值即:
对GM(1,1)模型进行改进,取,对原始数据序列进行对数变换。然后按原模型进行建模,其响应式为:
(2.11)
(2.12)
GM(1,1)模型拟合所得漂移值,与实验测得的漂移值,平均相对误差 3.44%,改进后的平均相对误差1.39%。因此建立的该模型具有该类陀螺的通用性。
2.2最小二乘法的温度补偿模型
2.2.1基本最小二乘法
基本最小二乘法,其统计学原理是[14]:设物理量y与l个变量间的依赖关系为
y=,其中是方程中需要确定的n+1个参数。最小二乘法就是通过m(m>n+1)个实验点()(i=1,2,)确定出一组参数值(),使由这组参数得出的函数值
与实验值间的偏差平方和s
()=取得极小值。为了减小随机误差,一般进行多点测量,
使方程式个数大于待求参数的个数,即m>n+1。这时构成的方程组叫做矛盾方程组。通过最小二乘法进行统计处理,将矛盾方程组转换成未知数个数和方程个数相等的正规方程组,再进
行求解得出。
2.2.2非线性最小二乘法
将非线性关系y=f()直接代入偏差平方和表达式中,采用极小值的求法得出的数值,较为繁琐。计算步骤如下[16,17]:
①设所求参数真值为(j=1,2,),另取初值,其差值故
②将函数y=f()在,处展开乘泰勒级数。由于初
值,与真值应当很接近,故可以略去函数的泰勒展开式高次项,取得一阶近似展开式:
式中(i=1,2,,m,m为实验点数)
③令,,,则展开式可写为:
,这是线性关系式的特殊形式。
④将多元线性最小二乘法拟合的正规方程式应用于上式,得出其正规方程组:
(k=1,2,)
a=
y==
⑤以高斯消元法或其它方法求解正规方程,即可得出,即,求出=,此式是
一个近似式,因而得出也是一个近似值。将首次求出的值赋给作为新的初值,重复上述过程,再求出新的值,从而新的初值,反复迭代,直到得出足够精度的为止。
2.2.3温度补偿模型
顾广清,夏敦柱等通过微机械陀螺仪的温度试验,用最小二乘法建立了温度补偿模型[12]。如图2.1所示,为陀螺在各个温度点对应的零偏值,图中实心点表示测量的原始数据,由这些点可以大致看出陀螺零偏随温度变化的规律,二者之间呈较复杂的非线性关系。用最小二乘法进行拟合。拟合分为三段:
当-40℃≤ T ≤-10℃时,
Bias=0.4813 + 0.00719T- 0. 000735+0.0000416; (2.13) 当-10℃≤ T ≤ 50℃时,
Bias= 0. 4313 - 0.00629T+ 0. 00121+0.00000642; (2.14) 当50℃≤ T ≤80℃时,
Bias= - 673.07 + 42.879T- 1.0146+0.01053; (2.15)
图2.1硅微陀螺仪零偏随温度变化的规律
将分段拟和多项式存储于微处理器的存储器,补偿过程中由实时测量的温度值T通过此多项式可以计算得到不同温度下陀螺的零偏值Bias,在陀螺输出值中减去Bias即可得到补偿后的陀螺输出信号。
2.3小波网络法的温度漂移模型
将离散小波基函数,作为小波网络隐层节点的激发函数,由于不考虑正交性,小波函数的选取有很大的自由度。根据被辨识对象的时频特性确定尺度因子j、平移因子k的取值范围后,网络的可调参数只有隐层到输出层的权值,且权值与网络输出呈线性关系,可通过最小二乘法修正权值,使网络输出一致逼近被辨识对象[15]。
张广莹,邓正隆等用小波网络法对温度对漂移系数的影响进行了建模[8]。在-40℃到60℃温度范围内对同一速率积分陀螺进行建模,小波函数选用Mexican小波,其函数形式为:
(2.16)
该小波为高斯函数的二阶导数,在时、频域同时具有很好的局部性。取其二进制离散小波作为网络小波基函数:
(2.17)
其方法就是选用合适的小波函数对其参数刻度系数SF、陀螺漂移系数DF、DI、DS进行建模,然后将拟合曲线与试验曲线较吻合,证明其可行性。在建模的过程中,为了实现不同目的的系统辨识,可以选择不同的小波基函数。为了兼顾拟合精度与平滑性两方面的要求,要选择合适的小波网络基函数的尺度因子。
3.结论
对微机械陀螺仪的误差进行估计和补偿,是在保证性能价格比的前提下,提高惯性导航系统精度的有效途径。本文主要就温度因素,展开了其对微机械陀螺仪的误差分析,并对温度误差的补偿模型,灰色模型的温度漂移模型、最小二乘法模型及小波网络法模型进行了介绍。其研究是在试验的基础上,进行建模分析,并与试验数据进行了比较,具有一定的适应性,并取得了一定的成果,具有重要意义。
参考文献
[1]闫子波,魏鸣.微机械陀螺仪的工作原理及其应用. 电子设计技术. 2009,(09):62-64
[2] 潘金艳,朱长纯,樊建民. 微机械陀螺零位误差的研究. 西安交通大学学报,2006,40(4):480-483.
[3] 罗均, 谢少荣. 微型传感器及其应用. 北京: 化学工业出版社,2005: 64-65, 182.
[4] Tanaka K, Mochida Y, Suzimoto M, et al. Amicromachined vibrating gyroscope. Sensors and Actuators, 1995, A50: 111 -115
[5] AGGARWAL P,SYED Z,NIU X,et al. A standard testing and calibration pr-ocedure for l ow cost MEMS inertial sensors and units[J].The Journal of Nav-aigation,2008,61:323-336.
[6] 李锦明. 高信噪比电容式微机械陀螺的研究. 太原: 中北大学,2005.
[7] NA VID YAZDI, FARROKH AYAZI, KHALIL NAJAFI. Micromachined Inertial Sensors. PROCEEDINGS OF THEIEEE,1998,86(8): 1640-165.
[8] 张广莹,邓正隆,傅振宪.陀螺仪温度建模研究.系统仿真学报.2003,15(3):369-378
[9]邓聚龙.灰色系统理论教程[M].武汉.华中理工大学出版社. 1990:28-96.
[10]王霄等.灰色GM(1,1)模型在电力系统负荷预测中的应用[J].沈阳工程学院学报. 2005,1(3): 66-67
[11]腾继涛.MIMU/GPS组和导航系统关键技术研究[D].北京:北京航空航天博士学位论文.200 3:24-4
[12] 杨金显,袁赣南,徐良臣.基于灰色模型的微机械陀螺温度漂移建模研究.传感技术学报.20 07,20(7):1551-1554
[13]顾广清,夏敦柱,李宏生,王寿荣.硅微陀螺仪数字化温度补偿系统的实现.舰船电子工程.2 008.(12):49-54
[14] 宗殿瑞,宋文臣,刘朋振.最小二乘法应用探讨.青岛化工学院学报.1998,19(3):296-301
[15] 吕伟杰,刘鲁源.基于切换多模型小波网络的非线性动态系统控制.天津大学学报.2004,(12)255-259
[16] 黄俊钦.静动态数学模型的实用建模方法.北京:机械工业出版社,1988.
[17] 宋文臣.True Basic语言程序设计.北京:电子工业出版社,1994.5
MEMS陀螺仪参数校准方法研究 摘要:针对陀螺仪标定成本与精度之间矛盾的问题,建立了陀螺仪的误差模型,探索了一组最佳标定位置,提出了针对陀螺仪的零偏、标度因数和安装误差角等参数引起测量数据出现偏差的4位置标定方法。并将该方法应用于机载系统的姿态测量单元,估计出了陀螺的标定参数,并对标定后的陀螺仪进行试验测试。测试结果表明,标定后陀螺仪的性能满足预期试验要求,验证了该标定方法的正确性和有效性。 关键词:陀螺仪;标定;4位置;零偏;标度因数;安装误差 引言 三轴陀螺仪常用来测量物体三个方向的角速率信息,及估计设备姿态信息。相对于传统陀螺仪,采用MEMS集成制造工艺的陀螺仪具有重量轻、体积小、成本低、可靠性高等优点,在机载导航及车载导航等领域得到了广泛应用。系统姿态测量的精度除了与姿态解算算法有关外,还与MEMS陀螺仪的加工工艺及安装精度相关。因而,对MEMS陀螺仪误差估计和标定的研究具有重要意义[1-2]。 陀螺仪的标定方法主要有基于转台的多位置角速率试验标定方法[3]和现场多位置标定方法[4-5]。传统的标定方法以高精度转台为测试基础,标定过程非常复杂。现场标定能够降低工作量,但标定精度相对较差。文献[6]在陀螺速率试验和24位置实验的基础上,提出一种无需基准北向的陀螺标定方法,消除了不对北误差影响。文献[7,8]结合传统的静态多位置和速率标定方法,提出基于双轴旋转机构的6位置标定方法,该方法求解标度因子和安装误差较为方便,但在求解常值漂移时步骤繁琐。文献[9]分别采用24位置、12位置和8位置对陀螺仪进行标定试验,表明标定位置减少,能够降低标定成本,但标定精度随之降低。因而要探究有效的标定位置,在降低标定成本的同时提高标定精度。 本文对陀螺仪的误差源进行分析,建立了测量误差的数学模型,提出了一种新型4位置陀螺仪标定方法,补偿了零偏,安装误差及标度因子对陀螺仪的影响,并进行相关实验测试。测试结果表明,该方法简化了现有标定步骤,节约了标定时间;标定结果满足预期试验要求,标定方法合理、可行。 1 陀螺仪的误差模型 在三轴陀螺仪中,三个轴向的陀螺分别安装于三个正交面上,构成右手坐标系。由于陀螺仪自身工作原理、结构,以及集成制造、安装等因素影响,导致陀螺仪的输入轴坐标系之间不能正交,存在一定的安装误差。陀螺仪标定的目的就是补偿输出值与测量值之间的偏差,补偿测量值为零而实际输出值不为零的零偏,补偿由加工精度、装配工艺等原因引起的安装耦合误差,因此MEMS陀螺的输出模型可以表示为: 其中,为敏感轴测量的角速度,为真实角速度,?啄?棕为线性刻度因子误差矢量,N为非正交因子矢量,为常值漂移(零偏),为陀螺噪声误差。考虑到陀螺噪声误差对标定结果的影响较小,忽略噪声误差对测量结果影响。令K=1+S+N,则上述公式可以变换为: 其中,Ky x、Kz x为敏感轴x对应的安装误差耦合系数;Kx y、Kz y为敏感轴y对应的安装误差耦合系数;Kx z、Ky z为敏感轴z对应的安装误差耦合系数;Kx x、Ky y 、Kz z 为3个敏感轴对应的标定因数;D x 、D y 、D z是陀螺敏感轴x、y、z的常值漂移(零偏)。 2 4位置标定方案
第二章 实验数据误差分析和数据处理 第一节 实验数据的误差分析 由于实验方法和实验设备的不完善,周围环境的影响,以及人的观察力,测量程序等限制,实验观测值和真值之间,总是存在一定的差异。人们常用绝对误差、相对误差或有效数字来说明一个近似值的准确程度。为了评定实验数据的精确性或误差,认清误差的来源及其影响,需要对实验的误差进行分析和讨论。由此可以判定哪些因素是影响实验精确度的主要方面,从而在以后实验中,进一步改进实验方案,缩小实验观测值和真值之间的差值,提高实验的精确性。 一、误差的基本概念 测量是人类认识事物本质所不可缺少的手段。通过测量和实验能使人们对事物获得定量的概念和发现事物的规律性。科学上很多新的发现和突破都是以实验测量为基础的。测量就是用实验的方法,将被测物理量与所选用作为标准的同类量进行比较,从而确定它的大小。 1.真值与平均值 真值是待测物理量客观存在的确定值,也称理论值或定义值。通常真值是无法测得的。若在实验中,测量的次数无限多时,根据误差的分布定律,正负误差的出现几率相等。再经过细致地消除系统误差,将测量值加以平均,可以获得非常接近于真值的数值。但是实际上实验测量的次数总是有限的。用有限测量值求得的平均值只能是近似真值,常用的平均值有下列几种: (1) 算术平均值 算术平均值是最常见的一种平均值。 设1x 、2x 、……、n x 为各次测量值,n 代表测量次数,则算术平均值为 n x n x x x x n i i n ∑==+???++=121 (2-1) (2) 几何平均值 几何平均值是将一组n 个测量值连乘并开n 次方求得的平均值。即 n n x x x x ????=21几 (2-2) (3)均方根平均值 n x n x x x x n i i n ∑==+???++= 1 222221均 (2-3) (4) 对数平均值 在化学反应、热量和质量传递中,其分布曲线多具有对数的特性,在这种情况下表征平均值常用对数平均值。 设两个量1x 、2x ,其对数平均值
计算机硬件(嵌入式)综合实践 设计报告 温度检测系统设计与制作
一.系统概述 1. 设计内容 本设计主要从硬件和软件部分介绍了单片机温度控制系统的设计思路,简单说明如何实现对温度的控制,并对硬件原理图和程序框图作了简洁的描述。还介绍了在单片机控制系统的软硬件设计中的一些主要技术关键环节,该系统主要以AT89S52单片机为核心, 同时利用DS18B20温度传感器采集温度,采用4位LED 显示管实施信息显示。 AT89S52单片机设计的温度检测电路是本次设计的主要内容,是整个单片机温度控制系统设计中不可缺少的一部分,该系统对温度进行实时采集与检测。本设计介绍的单片机自动控制系统的主要内容包括:系统概述、元器件选择、系统理论分析、硬件设计、部分软件设计及主要技术性能参数。 2. 元器件选择 单片机AT89S52:1个 22uF电容:2个 电阻:1个 万能板:1个 杜邦线:若干 单排排针:若干
DS18B20温度传感器:2个 4位LED显示管:1个 二.软件功能设计及程序代码 1.总体系统设计思想框图如下: 单片机应用 软件调试 软件编程 系统测试和调试 系统集成 硬件调试 选择单片机芯片 定义系统性能指标 硬件设计 2.主程序流程图 3.DS18B20数据采集流程图
4.程序代码 ①、温度记录仪 #include<> #include<> #include<> #include<> #include<> #include<> bit rec_flag=0;.",1); display(l2," ",1); eeprom_format(); display(l1,"Format Successed",1); longdelay(3); break; } if(ser_rec=='N') break; if(autobac_tim>10) break; } autobac_tim=0; break; case 'D':",1); display(l2," ",1); RDTP=512;",1); display(l2," ",1);
第29卷第6期1999年11月 东 南 大 学 学 报JOURNAL OF SOUTHEAST UNIVERSITY Vol 29No 6Nov.1999 收稿日期:1999-03-16. 第一作者:男,1967年生,讲师. 硅微型两自由度振动轮式陀螺仪原理分析 苏 岩 王寿荣 周百令 (东南大学仪器科学与工程系,南京210096) 摘 要 首次提出了2种两自由度振动轮式陀螺仪新结构.详细分析了陀螺仪工作原理,推导了陀螺仪动力学方程.介绍了电容信号器和力矩器的工作原理. 关键词 振动轮式陀螺仪;梳状谐振器;电容信号器 分类号 U666 123 国内外硅微型陀螺仪的研究方兴未艾.各种新的设想、新的结构、新的工艺层出不穷.目前,国内各研究单位所研究的微机械陀螺仪为单自由度陀螺仪.因此,研制、开发两自由度微机械陀螺仪是一项有意义的探索性工作. 本文提出了2种新的陀螺仪结构,这2种结构均可以实现两自由度输入敏感[1].由于环式陀螺仪的外环可以做的较大,因而动量矩较以往的陀螺仪为大,精度将得到很大提高.1 两自由度振动轮式陀螺仪的结构 双环振动轮式陀螺仪的结构如图1所示.该陀螺仪由上下两层构成.下层为引线和电容极板层,该层与仪表壳体相固连;上层为陀螺仪主体结构.陀螺仪外环通过一对挠性轴和内环相连;内环通过两对辐条和一对挠性轴与固定支架相连.外环与底板上的镀金层分别构成两对电容.这两对电容构成信号器和力矩器.用于敏感x 、y 轴的输入角速度和平衡输入力矩.内环设计成梳状谐振器,整个环等分成4部分,分别构成4个谐振器.各谐振器产生的静电力矩用于驱动内、外环绕回转轴振动.内环通过一对外挠性轴带动外环振动. 三环振动轮式陀螺仪的结构如图2所示.该陀螺仪亦由上下两层构成.下层为引线和电容极板层,该层与仪表壳体相固连;上层为陀螺仪主体结构.陀螺仪由3个圆环通过挠性轴相连.外环通过一对扁平状挠性轴与中环相连;中环通过另一对与外环挠性轴相垂直的扁平状挠性轴和内环相连;内环通过十字型挠性轴与圆柱形固定支架相连.外、中环可以分别绕各自的挠性轴扭转.同时,外、中环与底板上的镀金层分别形成两对电容.这两对电容构成信号器和力矩器.用于敏感x 、y 轴的输入角速度和平衡输入力矩.内环设计成梳状谐振器,整个内环等分成4部分,分别构成4个谐振器.各谐振器产生的静电力矩用于驱动内、中、外环振动.内环通过两对挠性轴带动中环和外环振动. 图3所示的陀螺仪结构为图2所示陀螺仪结构的另一种变型.其主要区别在于,图2所示陀螺仪的谐振器的固定叉指为外结构.中环与内环之间挠性轴的长度较长,结构设计时的难度
篇一:大学物理实验1误差分析 云南大学软件学院实验报告 课程:大学物理实验学期: - 学年第一学期任课教师: 专业: 学号: 姓名: 成绩: 实验1 误差分析 一、实验目的 1. 测量数据的误差分析及其处理。 二、实验内容 1.推导出满足测量要求的表达式,即 0? (?)的表达式; 0= (( * )/ (2*θ)) 2.选择初速度A,从[10,80]的角度范围内选定十个不同的发射角,测量对应的射程, 记入下表中: 3.根据上表计算出字母A 对应的发射初速,注意数据结果的误差表示。 将上表数据保存为A. ,利用以下程序计算A对应的发射初速度,结果为100.1 a =9.8 _ =0 =[] _ = ("A. "," ") _ = _ . ad ()[:-1] = _ [:]. ('\ ') _ = _ . ad ()[:-1] = _ [:]. ('\ ') a (0,10): .a d( a . ( a ( [ ])* / a . (2.0* a ( [ ])* a . /180.0))) _
+= [ ] 0= _ /10.0 0 4.选择速度B、C、D、重复上述实验。 B C 6.实验小结 (1) 对实验结果进行误差分析。 将B表中的数据保存为B. ,利用以下程序对B组数据进行误差分析,结果为 -2.84217094304 -13 a =9.8 _ =0 1=0 =[] _ = ("B. "," ") _ = _ . ad ()[:-1] = _ [:]. ('\ ') _ = _ . ad ()[:-1] = _ [:]. ('\ ') a (0,10): .a d( a . ( a ( [ ])* / a . (2.0* a ( [ ])* a . /180.0))) _ += [ ] 0= _ /10.0 a (0,10): 1+= [ ]- 0 1/10.0 1 (2) 举例说明“精密度”、“正确度”“精确度”的概念。 1. 精密度 计量精密度指相同条件测量进行反复测量测值间致(符合)程度测量误差角度说精密度所 反映测值随机误差精密度高定确度(见)高说测值随机误差定其系统误差亦。 2. 正确度 计量正确度系指测量测值与其真值接近程度测量误差角度说正确度所反映测值系统误差 正确度高定精密度高说测值系统误差定其随机误差亦。 3. 精确度 计量精确度亦称准确度指测量测值间致程度及与其真值接近程度即精密度确度综合概念 测量误差角度说精确度(准确度)测值随机误差系统误差综合反映。 比如说系统误差就是秤有问题,称一斤的东西少2两。这个一直恒定的存在,谁来都是 这样的。这就是系统的误差。随机的误差就是在使用秤的方法。 篇二:数据处理及误差分析 物理实验课的基本程序
实用温度监测系统 学院:电子信息工程学院专业:通信工程1303 学生姓名:张艺 学号:13211075 任课教师:刘颖 2015年06 月10 日
目录 实验题目:失真放大电路 .............. 错误!未定义书签。 1 实验题目及要求 (2) 2 实验目的与知识背景 (2) 2.1 实验目的 (2) 2.2 知识点 (2) 3 实验过程 (4) 3.1 选取的实验电路及输入输出波形 (4) 3.2 每个电路的讨论和方案比较 (16) 3.3 分析研究实验数据............. 错误!未定义书签。 4 总结与体会 (20) 4.1 通过本次实验那些能力得到提高,那些解决的问题印象深刻, 有那些创新点。 (20) 4.2 对本课程的意见与建议......... 错误!未定义书签。 5 参考文献 (21)
目录 1.电路设计及原理分析 (3) 1.1设计任务 (4) 1.2技术指标 (4) 1.3电路原理图 (5) 1.4基本原理 (5) 2.电路模拟与仿真 (6) 2.1仿真软件 (6) 2.2创建电路模拟图 (9) 2.3元件列表 (9) 2.4仿真记录与结果分析 (10) 3.实际电路的安装调试 (15) 3.1 元件参数确定 (15) 3.2 电路板布线设计 (15) 3.3 焊接 (15) 3.4调试与测量 (15) 3.5分析结果及改进 (16) 4.总结 (176) 5.心得体会 (177) 6.参考文献 (198)
1.电路设计及原理分析 1.1设计任务 通过Proteus软件仿真精密双限温度报警仪设计,在老师点拨我们自学的基础上了解了运放的作用,用了比较器,震荡电路等知识,根据找到的电路图进行仿真,调试电路,明白了温度报警的意义。 通过比较器产生“数字模拟信号”,使得在信号产生的时候,震荡电路工作产生震荡信号驱动扬声器报警。 1.2技术指标 a.当温度在设定范围内时报警电路不工作; b.当温度低于下限值或高于上限值时,声光报警; c.上下限低于报警led用不同颜色; d.上下限可调; e.控温精度度 1℃ f.监测范围0.5℃
微机械陀螺仪的温度误差分析和模型研究 摘要:微机械陀螺仪是一种用于测量物体运动角速度的新型惯性器件。这种新型陀螺仪具有体积小、重量轻、可靠性高、抗冲击、易于数字化和智能化、能大批量生产等优点,是未来惯性技术向民用领域大量推广应用最有前途的仪表。但环境温度是对其性能有重大影响。本文主要对微机械陀螺仪的温度误差原因进行分析,并对现有温度误差分析补偿模型进行了介绍。 关键词:微机械陀螺仪;温度误差;灰色模型;最小二乘法;小波网络法 The research on error analysis and model of microelectron-mechanical gyroscope (College of Aerospace Engineering, Nanjing University of Aeronautics &Astronautics, Nanjing, 210016, China) Abstract:Micro mechanical gyroscope is a new inertial component, which is used for measuring the velocity object movement. This new type of gyroscope has characteristics such as small size, light weight, high reliability, impact resistant, easy to digital and intelligent, and mass production, so it is the future technology to civil field large inertia popularization and application of the most promising instrument. But environmental temperature has a major impact on its performance. This paper mainly to analyz the micro mechanical inner temperature error reason, and the error analysis of existing temperature compensation models are introduced in this paper. Key words:microelectron-mechanical gyroscope;temperature error;gray model;wavelet network 陀螺仪又称角速度计,可以用来检测旋转角速度和角度。传统的机械陀螺、精密光线陀螺和激光陀螺等已在航空航天等军事领域得到广泛应用。但是无论从尺寸还是成本上,都不能满足微型武器的应用要求[1]。近年来,随着半导体技术集成电路微细加工技术的迅速发展,MEMS(Micro-Electro-Mechanical System)惯性器件得到快速发展,微机械陀螺仪也得到快速发展,它具有体积小,抗冲击,可靠性高,寿命长,成本低等特点,在军事和民用等领域应用前景广阔[2]。据各国研究成果表明,随着器件精度的不断提高,微机械陀螺仪技术必将在未来的军用及民用的相关领域中发挥越来越重要的作用[3]。但是由于性能限制,MEMS陀螺主用于中低精度导航。在微机械陀螺中的众多误差因素中,环境温度的影响是不可忽视的。因此对微机械陀螺仪的温度特性进行分析,并进行温度误差的建模和补偿是提高精度的有效手段,也是当前MEMS陀螺研究的热点之一。 1.微机械陀螺仪的温度误差分析 微机械陀螺仪的精度是决定惯性系统精度的核心因素,陀螺仪的精度较低,对姿态测量系统的动态性能影响很大。由于其对温度敏感度大,温度漂移成为其主要的误差源之一。首先分析微机械陀螺仪的工作原理,然后分析温度对微机械陀螺仪的影响。 1.1微机械陀螺仪的工作原理 微机械陀螺仪利用了哥氏力现象,其原理如图1.1所示。图中的物体沿X轴做周期性振
The S en sitivity Study of an Angular Vibratory Microme chanical Gyro s cope Driven by the Inner Frame F A NY u e-m i n g1,2,M A O Pan-s o n g2 1.D e pa rt m e nt o f In fo r matio n e n g in e er in g,N an jin g U n i v er s it y of Po st s an d T e le c o m m u n ic atio n,N an jin g210003,C h ina 2.D e pa rt m e nt o f E le ctr o n ic e n gi n e e r in g,S o u th e ast U ni v e r sit y,N an ji n g210096,C h in a () Ab stra ct: T hi s pa pe r de v el o p s d y na m ic a n d s en sit i ve eq u ati o n s o f a n g ula r v i br at or y m ic r o m e ch an ic al g yr o s c o p e w ith d u-al-g i m b al dri v en b y t he i n ne r g i m bal f r a m e,a n d pr ese nt s t w o s i m p le an d f ea si ble m et h o d s t o e n ha nc e t he g yr o sc o pe’s sen s iti v it y.T he f re q ue nc y o f t he i n ne r g i m bal f ra m e an d th e nat ur al f r eq u en c y o f th e o ute r g i m bal f ra m e a re e q ual.T h e dri v en si g n al co n si sts o f t w o s in e-w a v es an d th eir fr e q ue ncies a r e s ele cted t o eq u al t o th e nat ur al f re q ue nc y o f in n e r an d o ute r f r a m e.in de si g ni n g g yr o s co pe s y ste m. Ke y w ord s: 7630m icr o m e ch an ic al g y ro sc o p e;d o u b le g i m b als;se n siti v it y EEACC: 内框驱动式硅微型角振动陀螺仪灵敏度研究① 方玉明1、2,茅盘松2 1.南京邮电学院信息工程系,南京210003; 2.东南大学电子工程系,南京210096. () 摘要:建立了内框驱动式硅微型角振动陀螺仪的运动方程,导出了灵敏度方程,提出了提高陀螺系统灵敏度的简单可行的方法,即:设计制造陀螺仪时,使内外框架固有频率相等,或驱动信号采用二个正弦波之和,二个正弦波的频率应选为框架的固有频率。 关键词:微机械陀螺仪;双框架;灵敏度 中图分类号:1?249.122文献标识码:A文章编号:1005-9490(2004)01- 众所周知,微陀螺仪技术对国防建设和国民经济建设具有极其重要的意义。它广阔的应用前景使得这方面的课题成为热门的跨世纪的研究领域之一。硅微型双框架式角振动陀螺仪首先由美国C S-D L实验室1988年研制成功。它有两个框架,一为驱动,一为检测。按驱动框是内框还是外框,可分为内框驱动式和外框驱动式。对于内框驱动,施加于内框架的驱动力矩可以被挠性杆隔离,不会引起外框架振动,从而可以提高信噪比。故本文按内框驱动式,建立了硅微型角振动陀螺仪的运动方程,导出了灵敏度方程,提出了提高陀螺系统灵敏度的简单可行的方法,即:设计制造陀螺仪时,使内外框架固有频率相等,或驱动信号采用二个正弦波之和,二个正弦波的频率应分别选为内、外框架的固有频率。 1内框驱动式硅微型角振动陀螺仪的结构组成及工作原理[1] 如图1所示,陀螺仪由内、外两个框架组成,内 第27卷第1期2004年3月 电子器件 C h in ese J o urn al o f E le ctr o n D e v ic es V o l.27,N o.1 M a r ch.2004 ①收稿日期:2003-02-24 基金项目:江苏省高校自然科学研究计划项目资助(项目编号:03K J B510089) 作者简介:方玉明(1952-),女,南京邮电学院信息工程系讲师,现在东南大学电子工程系微电子专业攻读博士学位,研究方向为微电子学及M E M S系统研究,f an g y m@nj u p t.ed https://www.doczj.com/doc/617473844.html,.
谈谈对陀螺仪和加速度传感器的感性认识 前几天看到官网的新规则觉得很有意思看看自己帐号注册2年多了比赛也做了2届从论坛上下了大堆资料也没给论坛贡献什么有价值的东西实在惭愧啊正好自己以前捣鼓过一段时间四轴飞行器把当时收集的一些资料发上来大家共享下吧大部分取自网络还有一部分自己的思考重要的地方用红字标明了来自网络的都用蓝字标明本人才疏学浅论坛里藏龙卧虎有不对的还请大家指正新手看看全当一个感性认识。由于时间太长就不标原文地址了大家搜搜都能搜到另外四轴飞控论坛上已经看到有人跑过去要7260 和EN—03的资料了嘿嘿数据手册其实很好找的相关资料也很多的大家多多利用搜索引擎 啊 加速度传感器测的是什么? 我觉得很多时候大家都被它的名字给误导了我觉得准确的来说它测的不是加速度至少对于mma7260这类的片子它检测的是它受到的惯性力(包括重力!重力也是惯性力)。那又有人要问了 F=ma 惯性力不就是加速度么?差矣加速度传感器实际上是用MEMS 技术检测惯性力造成的微小形变注意检测的是微小形变所以你把加速度传感器水平静止放在桌子上它的Z轴输出的是1g的加速度因为它Z轴方向被重力向下拉出了一个形变可是你绝对不会认为它在以1g的加速度往下落吧你如果让它做自由落体它的Z轴输出应该是0 给个形象的说法可以把它看成是一块弹弹胶它检测的就是自己在三个方向被外力作用造成的形变。从刚才的分析可以发现重力这个东西实际是个很恶心的东西它能隔空打牛,在不产生加速度的情况下对加速度传感器造成形变,在产生加速度的时候不造成形变,而其他力都做不到。可惜的是,加速度传感器不会区分重力加速度与外力加 速度。 所以,当系统在三维空间做变速运动时,它的输出就不正确了或者说它的输出不能表明物体的姿态和运动状态举个例子当一个物体在空间做自由落体时在X轴受到一个外力作用产生g的加速度这时候x y z 轴的输出分别是 g,0,0 如果这个物体被x轴朝下静止放在水平面上它x y z 轴的输出也分别是 g,0,0 所以说只靠加速度传感器 来估计自己的姿态是很危险而不可取的 加速度传感器有什么用? 加速度计,可以测量加速度,包括重力加速度,于是在静止或匀速运动(匀速直线运动)的时候,加速度计仅仅测量的是重力加速度,而重力加速度与刚才所说的R坐标系(绝对坐标系)是固连的,通过这种关系,可以得到加速度计所在平面与地面的角度关系也 就是横滚角和俯仰角计算公示如下俯仰角
温室大棚温度测量系统设计 摘要 温度控制是蔬菜大棚最重要的一个管理因素,温度过高或过低,都会影响蔬菜的生长。传统的温度控制是用温度计来测量,并根据此温度人工来调节其温度。但仅靠人工控制既耗人力,又容易发生差错。为此,现代的蔬菜大棚管理常需要温度自动控制系统,以简单方便、快速的的控制大棚的温度。 本设计以STC89C52RC单片机为控制中心,用DS18B20为温度检测传感器,NRF905无线射频芯片为传述单元并用LCD1602显示。由温度测量控制电路、键盘、显示电路、报警电路等组成,实现对大棚环境温度测量与控制,用户可通过键盘设置需要报警的上下限值。文中从硬件和软件两方面介绍了温度控制系统,对硬件原理图和程序流程图进行了系统的描述。并用Keil作为软件调试界面,PROTEUS作为硬件仿真界面,实现了系统的总体调试,结果表明该系统能实现温度的自动测量和自动控制功能,可将棚的温度始终控制在适合蔬菜生长的温度围。 关键词: STC89C52RC,温度传感器,NRF905,LCD1602 ABSTRACT For the vegetable greenhouse, the most important management factor is the temperature control. If the temperature is too high or too low, the vegetables will be killed or stopped growing.Traditional temperature control is suspended a thermometer in greenhouse internal, the workers can regulate the temperature inside the greenhouse based on the temperature value. Now, the modern management of vegetable greenhouses usually uses automatic temperature to control system. The design use the STC89C52RC microcontroller as the control center, within DS18B20 for temperature detection element, including the temperature control circuit, keyboard, display circuit, alarm circuit, achieving the greenhouse environment, temperature measurement and control, the user can set the desired alarm through the keyboard. And using Keil as a software debugging interface, PROTEUS as hardware emulation and debugging interface to achieve the overall system debugging, the results show that the system can realize automatic temperature measurement and automatic control, So can always control the temperature of greenhouse for vegetable growth’s temperature range. KEY WORDS:STC89C52RC,temperature sensor,NRF905,LCD1602 1 绪论 1.1背景及意义
mems陀螺仪 mems陀螺仪即硅微机电陀螺仪,绝大多数的MEMS陀螺仪依赖于相互正交的振动和转动引起的交变科里奥利力。MEMS (Micro-Electro-Mechanical Systems)是指集机械元素、微型传感器、微型执行器以及信号处理和控制电路、接口电路、通信和电源于一体的完整微型机电系统。 目录 ?mems陀螺仪的原理 ?mems陀螺仪的特点 ?mems陀螺仪的构成 ?mems陀螺仪的选用 ?mems陀螺仪的安装 mems陀螺仪的原理 ?MEMS 陀螺仪(gyroscope)的工作原理传统的陀螺仪主要是利用角动量守恒原理, 因此它主要是一个不停转动的物体, 它的转轴指向不随承载它的支架的旋转而变化. 但是MEMS 陀螺仪(gyroscope)的工作原理不是这样的,因为要用微机械技术在硅片衬底上加工出一个可转动的结构可不是一件容易的事.MEMS 陀螺仪利用科里奥利力——旋转物体在有径向运动时所受到的切向力. 下面是导出科里奥利力的方法. 有力学知识的读者应该不难理解. 在空间设立动态坐标系(图一).用以下方程计算加速度可以得到三项,分别来自径向加速,科里奥利加速度和向心加速度. 如果物体在圆盘上没有径向运动,科里奥利力就不会产生.因此,在MEMS 陀螺仪的设计上,这个物体被驱动,不停地来回做径向运动或者震荡,与此对应的科里奥利力就是不停地在横向来回变化,并有可能使物体在横向作微小震荡,相位正好与驱动力差90 度.
MEMS 陀螺仪通常有两个方向的可移动电容板.径向的电容板加震荡电压迫使物体作径向运动(有点象加速度计中的自测试模式) ,横向的电容板测量由于横向科里奥利运动带来的电容变化(就象加速度计测量加速度) .因为科里奥利力正比于角速度,所以由电容的变化可以计算出角速度. mems陀螺仪的特点 ?MEMS陀螺仪是利用coriolis 定理,将旋转物体的角速度转换成与角速度成正比的直流电压信号,其核心部件通过掺杂技术、光刻技术、腐蚀技术、LIGA技术、封装技术等批量生产的,它主要特点是 1. 体积小、重量轻,其边长都小于1mm,器件核心的重量仅为1.2mg。 2. 成本低 3. 可靠性好,工作寿命超过10 万小时,能承受1000g 的冲击。 4. 测量范围大,目前我公司生产的MEMS 陀螺仪测量范围可扩展到7560?/s。 mems陀螺仪的构成 ?MEMS 陀螺仪(gyroscope)的设计和工作原理可能各种各样,但是公开的MEMS 陀螺仪均采用振动物体传感角速度的概念. 利用振动来诱导和探测科里奥利力而设计的 MEMS 陀螺仪没有旋转部件, 不需要轴承, 已被证明可以用微机械加工技术大批量生产. 绝大多数MEMS 陀螺仪依赖于由相互正交的振动和转动引起的交变科里奥利力. 振动物体被柔软的弹性结构悬挂在基底之上. 整体动力学系统是二维弹性阻尼系统, 在这个系统中振动和转动诱导的科里奥利力把正比于角速度的能量转移到传感模式. 通过改进设计和静电调试使得驱动和传感的共振频率一致, 以实现最大可能的能量转移, 从而获得最大灵敏度.大多数MEMS 陀螺仪驱动和传感模式完全匹配或接近匹配,它对系统的振动参数变化极其敏感, 而这些系统参数会改变振动的固有频率, 因此需要一个好的控制架构来做修正.如果需要高的品质因子(Q) ,驱动和感应的频宽必须很窄.增加1%的频宽可能降低20%的信号输出.还有阻尼大小也会影响信号输出. 一般的MEMS 陀螺仪由梳子结构的驱动部分和电容板形状的传感部分组成. 有的设计还带有去驱动和传感耦合的结构. mems陀螺仪的选用 ?陀螺仪在选用时,必须注意被测参数的物理环境和必要的性能指标。具体要求分列如下: 1.性能要求 ⑴ .随机漂移、随机游走系数、输出噪声 不同结构形式、不同原理的陀螺仪的对漂移率定义和要求不同,机械式陀螺仪精度使用的是随机漂移,光纤陀螺仪使用的随机游走系数。 随机漂移——指由随机的或不确定的有害力矩引起的漂移率。 随机游走系数——由白噪声产生的随时间累计的陀螺仪输出误差系数。 单位: ?/h1/2、?/s1/2。 输出噪声的单位:?/h/Hz1/2、?/s /Hz1/2 。
南京工程学院 自动化学院 本科毕业设计(论文)题目:智能温度检测与显示系统的设计专业:自动化
南京工程学院自动化学院本科毕业设计(论文) Graduation Design (Thesis) Design of Intelligent temperature examination and display system By Zhang zhe Supervised by Associate Prof. Song Lirong Department of Automation Engineering Nanjing Institute of Technology June, 2009
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
硅微型梳状线振动驱动式陀螺仪 硅微型振动陀螺仪在工作时,用微幅振动代替高速旋转 硅微型梳状线振动驱动式陀螺仪的工作原理: 结构图如图所示: 机械部分由基座,提供驱动力的定齿,动齿,活动质量和连接活动质量的弹簧,固定弹簧的固定端组成。固定端和定齿都固定在基座上,活动质量由弹簧连接在固定端上。动齿固定在活动质量上。该陀螺仪采用静电驱动技术,给固定在基座上的定齿梳状电极上加载带直流偏执的交流电压,活动质量上的动齿接地。这样动、静齿间便产生大小和方向周期性变化的静电吸引力,使整个活动质量和动齿一起在两定齿之间来回振动,此时若基座在惯性空间中作转动,由于哥氏力的作用,活动质量将在垂直于基座的方向上振动,这样就可敏感基座相对于惯性空间转动的角速度。 建坐标系:取将动作标系固连在硅微型梳状线振动驱动式陀螺仪的基座上,取动作标系的原点为活动质量质心的平衡位置,x轴为静电驱动力的方向,z轴为与基座垂直的方向,y轴由右手规则确定。 (1)只做x轴方向的转动时的结论: 1.该方向上的角速度不能测量; 2.随着静电引力的振动频率的增大,活动质量的振动的振幅会大大减小,该陀螺仪的灵敏度会降低。 3.x轴方向的角速度不能大于根号内K/m,否则陀螺仪将被损坏。陀螺仪损坏的临界值随尺寸的降低而迅速增加。 (2)只做z轴方向的转动时的结论:不能测量该方向上的角速度。 (3)陀螺仪的基座在y轴方向的转动角速度近似地与活动质量在z轴方向的这一振动频率为ω的振动的振幅成正比。比例系数为2δ/(mω3) 小结:该陀螺仪对y轴方向的角速度最敏感,即应当它作为输入量,把y轴作为输入轴。而对其影响最强烈的是活动质量在z轴方向频率为ω的振动的振幅,它可以作为输出量。而静
物理实验课的基本程序 物理实验的每一个课题的完成,一般分为预习、课堂操作和完成实验报告三个阶段。 §1 实验前的预习 为了在规定时间内,高质量地完成实验任务,学生一定要作好实验前的预习。 实验课前认真阅读教材,在弄清本次实验的原理、仪器性能及测试方法和步骤的基础上,在实验报告纸上写出实验预习报告。预习报告包括下列栏目: 实验名称 写出本次实验的名称。 实验目的 应简单明确地写明本次实验的目的要求。 实验原理 扼要地叙述实验原理,写出主要公式及符号的意义,画上主要的示意图、电路图或光路图。若讲义与实际所用不符,应以实际采用的原理图为准。 实验内容 简明扼要地写出实验内容、操作步骤。为了使测量数据清晰明了,防止遗漏,应根据实验的要求,用一张A4白纸预先设计好数据表格,便于测量时直接填入测量的原始数据。注意要正确地表示出有效数字和单位。 §2 课堂操作 进入实验室,首先要了解实验规则及注意事项,其次就是熟悉仪器和安装调整仪器(例如,千分 尺调零、天平调水平和平衡、光路调同轴等高等)。 准备就绪后开始测量。测量的原始数据(一定不要加工、修改)应忠实地、整齐地记录在预 先设计好的实验数据表格里,数据的有效位数应由仪器的精度或分度值加以确定。数据之间要留有间隙,以便补充。发现是错误的数据用铅笔划掉,不要毁掉,因为常常在核对以后发现它并没有错,不要忘记记录有关的实验环境条件(如环境温度、湿度等),仪器的精度,规格及测量量的单位。实验原始数据的优劣,决定着实验的成败,读数时务必要认真仔细。运算的错误可以修改,原始数据则不能擅自改动。全部数据必须经老师检查、签名,否则本次实验无效。两人同作一个实验时,要既分工又协作,以便共同完成实验。实验完毕后,应切断电源,整理好仪器,并将桌面收拾整洁方能离开实验室。 §3 实验报告 实验报告是实验工作的总结。要用简明的形式将实验报告完整而又准确地表达出来。实验报告 要求文字通顺,字迹端正,图表规矩,结果正确,讨论认真。应养成实验完后尽早写出实验报告的习惯,因为这样做可以收到事半功倍的效果。 完整的实验报告应包括下述几部分内容: 数据表格 在实验报告纸上设计好合理的表格,将原始数据整理后填入表格之中(有老师签 名的原始数据记录纸要附在本次报告一起交)。 数据处理 根据测量数据,可采用列表和作图法(用坐标纸),对所得的数据进行分析。按照 实验要求计算待测的量值、绝对误差及相对误差。书写在报告上的计算过程应是:公式→代入数据→结果,中间计算可以不写,绝对不能写成:公式→结果,或只写结果。而对误差的计算应是:先列出各单项误差,按如下步骤书写,公式→代入数据→用百分数书写的结果。 结果表达 按下面格式写出最后结果: )N ()(N )N (总绝对误差测量结果待测量?±=.. %100(??=N N )Er 相对误差
毕业论文开题报告 机械设计制造及其自动化 温度检测系统的设计 一、选题的背景和意义 在当今社会里,温度和人类的生产、生活有着很密切的联系,同时在工业生产中也是一个很重要的基本工艺参数,例如在机械、石油、化工、电子等各类工业中经常需要对温度进行检测然后进行控制。如今人们的生活水平不断提高,自然也越来越开始关心自己的生活环境,空气中温度的改变会直接影响一个人的舒适感和情绪,所以对温度的检测和控制的研究非常需要的。总之,环境温度的检测仪器的设计和开发有着很好的市场前景和实用价值。 温度是生产生活中主要的环境参数,对其进行准确的检测有着很重要的意义。炼钢炉中温度不正常,会大大影响钢铁质量;人的体温不正常了,说明人生病了;蔬菜大棚中的温度不正常了,就可能引起蔬菜死亡或生长受影响。准确的获得温度值,能更好的提高生活质量和生产力。 二、研究目标与主要内容 本设计是基于AT89S52单片机为核心处理器的温度检测系统。系统采用AT89S52单片为主控CPU机,DS18B20为温度传感器,点阵字符形液晶显示器LCD1602,蜂鸣器,4个按键构成一个完整的温度检测系统。主要功能为:单片机读取DS18B20中的数据并转为温度数据,同时将温度值显示在LCD1602上,检测范围为0摄氏度到99摄氏度,精度为0.5摄氏度;温度报警功能,温度上限报警值可以通过按键进行调整,报警状态也可以通过设置按键进行选择。 1引言 1.1温度检测的研究背景 1.2温度检测的意义 1.3本论文研究的主要内容
2系统硬件设计 2.1系统方案论述 2.1.1单片机选择 2.1.2显示器件的选择2.1.3温度传感器选择2.2系统模块功能介绍2.2.1单片机模块 2.3.2温度传感器模块2.3.3按键模块 2.3.4液晶显示模块 2.3.5蜂鸣器报警模块 3系统软件设计 3.1系统软件整体设计3.2系统子模块程序设计3.2.1显示模块程序设计3.2.2测温模块程序设计3.2.3按键模块程序设计4系统软硬件调试 5实物制作及调试 参考文献 致谢