基于负载自适应的高升力系统高效液压驱动技术
- 格式:docx
- 大小:42.58 KB
- 文档页数:12
水下滑翔机平衡式浮力驱动技术及其效率分析摘要:本文首先阐述了水下滑翔机的运动机理,然后分析了当前主流滑翔机小型化的原因,创新性的提出平衡式浮力驱动技术来解决水下滑翔机大驱动力的问题,扩大了水下滑翔机的运用领域。
并对其浮力驱动效率进行分析,结果表明当滑翔机机翼升阻比一定时,选择合适的滑翔角,能使其驱动效率达到最高,为水下滑翔机的设计奠定了基础。
关键词:水下滑翔机;浮力驱动效率;升阻比10 引言水下滑翔机(Autonomous underwater glider简称AUG)是一种小型可重复使用的水下航行器,几十公斤的体积重量却能在深海大洋中航行几千公里。
水下滑翔机之所以能以娇小的身躯完成穿越大洋的壮举,是依靠浮力驱动的结果。
浮力驱动主要特点是浮力可调和重心可变,这种简单低能耗航行原理是由美国海洋学家Henry Stommel[1]于1989年发现的。
一些生物学家推测,海豚正是由于具有类似的能力而能够在水下游相当长的距离。
在保证自身重量不变的前提下,通过改变排水体积,产生剩余浮力变化,结合高效的流体动力布局,将深度空间上重力或浮力势能,反复转化为前进的动能,通过锯齿状滑行,完成高效率的受控航行。
水下滑翔机一经发明就深受科学家和军方青睐,已获得了相当广泛的应用。
近几年国内有多家单位对水下滑翔机的浮力驱动系统进行研究,浮力驱动系统的安装位置和大小对水下滑翔机的工作能力有较大影响。
例如天津大学的“海燕”号滑翔机将浮力驱动系统布置在头部,提高了滑翔机的机动性,适用于浅海的测量任务;沈阳自动化研究所的“海翼”号滑翔机将浮力驱动系统布置在艉部,有利于滑翔机滑翔过程中的控制精度和稳定性,适用于深海大深度的观测任务[2];“海燕”[3]和“海翼”[4]的重量都在60kg左右,其浮力改变量为±0.5L。
本文在参考国内外几大典型水下滑翔机设计方案的基础上,分析水下滑翔机小型化的原因,从研究水下滑翔机浮力驱动系统入手,创新性的提出平衡式浮力驱动技术来解决水下滑翔机大驱动力的问题,扩大了水下滑翔机的运用领域,并通过对水下滑翔机浮力驱动效率的分析,得出浮力驱动效率主要受滑翔角和升阻比的影响,为水下滑翔机的后续设计提供了重要参考。
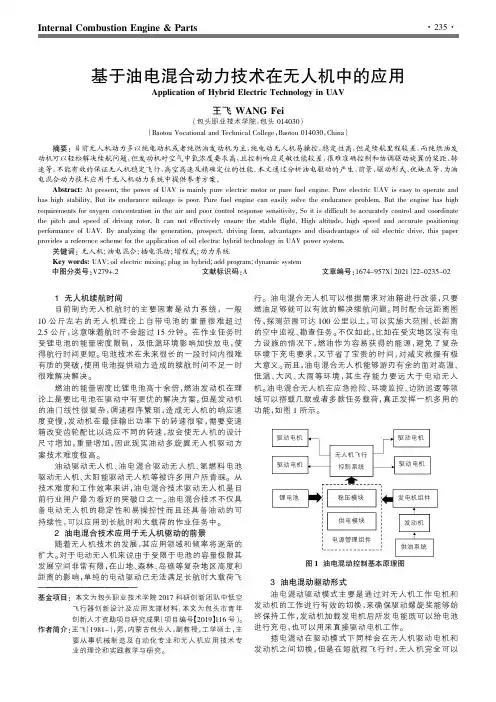
InternalCombustionEngine&Parts1无人机续航时间目前制约无人机航时的主要因素是动力系统,一般10公斤左右的无人机理论上自带电池的重量很难超过2.5公斤,这意味着航时不会超过15分钟。在作业任务时受锂电池的能量密度限制,及低温环境影响加快放电,使得航行时间更短。电池技术在未来很长的一段时间内很难有质的突破,使用电池提供动力造成的续航时间不足一时很难解决解决。燃油的能量密度比锂电池高十余倍,燃油发动机在理论上是要比电池在驱动中有更优的解决方案。但是发动机的油门线性很复杂,调速程序繁琐,造成无人机的响应速度变慢,发动机在最佳输出功率下的转速很窄,需要变速箱改变齿轮配比以适应不同的转速,故会使无人机的设计尺寸增加,重量增加,因此现实油动多旋翼无人机驱动方案技术难度极高。油动驱动无人机、油电混合驱动无人机、氢燃料电池驱动无人机、太阳能驱动无人机等被许多用户所青睐。从技术难度和工作效率来讲,油电混合技术驱动无人机是目前行业用户最为看好的突破口之一。油电混合技术不仅具备电动无人机的稳定性和易操控性而且还具备油动的可持续性,可以应用到长航时和大载荷的作业任务中。2油电混合技术应用于无人机驱动的前景随着无人机技术的发展,其应用领域和频率将逐渐的扩大。对于电动无人机来说由于受限于电池的容量极限其发展空间非常有限,在山地、森林、岛礁等复杂地区高度和距离的影响,单纯的电动驱动已无法满足长航时大载荷飞行。油电混合无人机可以根据需求对油箱进行改装,只要燃油足够就可以有效的解决续航问题。同时配合远距离图传,探测范围可达100公里以上,可以实施大范围、长距离的空中监视、勘查任务。不仅如此,比如在受灾地区没有电力设施的情况下,燃油作为容易获得的能源,避免了复杂环境下充电要求,又节省了宝贵的时间,对减灾救援有极大意义。而且,油电混合无人机能够游刃有余的面对高温、低温、大风、大雨等环境,其生存能力要远大于电动无人机。油电混合无人机在应急抢险、环境监控、边防巡逻等领域可以搭载几款或者多款任务载荷,真正发挥一机多用的功能,如图1所示。
航空永磁电驱动系统比例谐振型自抗扰速度控制器设计作者:陈哲陈沛阳滕国飞李金程骆光照来源:《航空科学技术》2023年第12期摘要:襟缝翼机电作动器是飞机高升力系统中的关键运动部件,其速度控制对襟缝翼的姿态调节十分重要。
然而,襟缝翼机电作动器易受到翼面周期性或非周期性气动载荷干扰,传统的比例积分型速度控制器性能实现受限。
为此,本文提出一种基于比例谐振自抗扰控制器(ADRC),在抑制非周期性干扰基础上还可抑制特定次周期性干扰。
周期性干扰通过采用比例谐振控制的扩展状态观测器来估计。
通过试验,比较了比例积分型控制器、传统线性自抗扰控制器和比例谐振型自抗扰控制器的控制性能,验证了本文所提出的方法可以显著抑制干扰、提高机电作动器的速度控制精度,为飞机平稳起降提供技术支撑。
关键词:机电作动器;永磁同步电机;速度控制器;周期性干扰;比例谐振中图分类号:TM34 文献标识码:A DOI:10.19452/j.issn1007-5453.2023.12.008基金项目:航空科学基金(201919053002)随着全电/多电飞机的快速发展,高功率密度机电作动器(EMA)在飞机飞行控制系统中得到了极大的推广,其大多采用具有高功率密度和高效率的永磁同步电机(PMSM)[1-3]。
在飞机高升系统的襟缝翼EMA中,需要加、减速度快和速度控制精度高[4]。
襟缝翼翼面在飞行中的气弹性载荷表现为周期性扭矩载荷[5],对PMSM驱动器的速度控制精度产生很大影响。
根据文献[6]、文献[7]中的分析,气动载荷或颤振的频率范围为25~250rad/s,并高度依赖其翼型的几何设计和材料特性。
因此,设计出一种抗干扰能力强的速度控制器对提升航空EMA性能具有重要意义。
现有的比例积分微分(PID)速度控制器在周期性负载扰动存在时控制性能受限。
为了设计一种更具抗周期干扰能力的速度控制器,许多学者尝试采用基于模型的控制策略,如模型预测控制[8]和内部模式控制[9],以及无模型速度控制策略,如重复控制(RC)[10]和迭代学习控制(ILC)[11]。
变桨距机组的控制技术本文对变桨距风力发电机组控制系统的特点以及控制策略分别进行详细介绍。
一、变桨距机组控制系统的特点从空气动力学角度考虑,当风速过高时,只有通过调整桨叶节距,改变气流对叶片的攻角,从而改变风力发电机组获得的空气动力转矩,才能使功率输出保持稳定。
同时,风力机在启动过程中也需要通过改变节距来获得足够的启动转矩。
采用变桨距机构的风力发电机组可使桨叶和整机的受力状况大为改善,这对大型风力发电机组的总体设计十分有利。
目前已有多种型号的变桨距600kW级风力发电机组进入市场。
其中较为成功的有丹麦VESTAS的V39/V42-600kW机组和美国Zand的Z 40-600kW机组。
从今后的发展趋势看,在大型风力发电机组中将会普遍采用变桨距技术。
变桨距风力发电机组又分为主动变桨距控制与被动变桨距控制。
主动变桨距控制可以在大于额定风速时限制功率,这种控制的实现是通过将每个叶片的部分或全部相对于叶片轴方向进行旋转以减小攻角,同时也减小了升力系数。
被动变桨距控制是一种令人关注的可替代主动变桨距限制功率的方式,其思路是将叶片或叶片的轮毂设计成在叶片载荷的作用下扭转,以便在高风速下获得所需的节距角。
但因为所必需的叶片随风速变换而扭转的变化量一般并不与叶片相应的载荷变化相匹配,所以很难实现。
对于独立运行的风力发电机组,发电量的最大化不是主要目标,被动变桨距控制方案有时候被采用,但是这一概念在并网运行的风力发电机组中尚未应用。
变桨距控制主要是通过改变翼型迎角变化,从而使翼型升力变化来进行调节的。
变桨距控制多用于大型风力发电机组。
变桨距控制是通过叶片和轮毂之间的轴承机构转动叶片减小迎角,由此来减小翼型的升力,以达到减小作用在风轮叶片上的扭矩和功率的目的。
变桨距调节时叶片迎角可相对气流连续地变化,以便得到风轮功率输出达到希望的范围。
在90°迎角时是叶片的顺桨位置。
在风力发电机组正常运行时,叶片向小迎角方向变化从而限制功率,一般变桨距范围为90°~100°。
液压注意 – 用户方责任 错误或不当地选择或使用本样本或有关资料阐述的产品,可能会导致人生伤亡及财产损失! 本样本以及其它由派克汉尼汾公司及其子公司、销售公司与授权分销商所提供的资料,仅供用户专业技术人员在对产品和系统的选型进行深入调查考证时参考。
用户应全面分析自身设备的运行工况、适用的工业标准,并仔细查阅现行的样本,以详细地了解产品及系统的相关信息,通过自己的分析和试验,对产品及系统的独立的最终选择负责,确保能满足自身设备的所有性能、耐用性、维修型、安全性以及预警功能等要求。
对于派克或其子公司或授权分销商而言,应负责按用户提供的技术资料和规范,选择和提供适当的元件或系统,而用户则应负责确定这些技术资料和规范对其设备的所有运行工况和能合理预见的使用工况是否充分和准确。
目录目录页次概述 1 订货代号 2 技术参数 4 变量控制器 5 控制选项 “C”, 压力限定(恒压)变量控制器 5 控制选项 “L”, 负载传感及压力限定变量控制器 6 控制选项 “AM”, 带遥控口的标准型先导式压力限定变量控制器 7 控制选项 “AN”, 带ISO 4401 NG06先导阀安装界面的先导式压力限定变量控制器 8 控制选项 “AE”及“AF”, 带电磁比例调节的先导式压力限定变量控制器 9 控制选项 “AMT”, “ALT”及“LOT”, 带最高压力限定的扭矩限定(恒功率)变量控制器 10 P1性能特性 11典型流量特性 11 典型总效率特性 13 典型轴输入功率特性 15 典型噪声特性 18 典型轴承寿命 20 PD性能特性 22典型流量特性 22 典型总效率特性 24 典型轴输入功率特性 26 典型噪声特性 29 典型轴承寿命 31 安装尺寸 33 P1/PD 018 33 P1/PD 028 36 P1/PD 045 40 P1/PD 060 44 P1/PD 075 49 P1/PD 100 54 P1/PD 140 59 变量控制器安装尺寸 65 可提供的扩展的液压产品 75派克汉尼汾备记派克汉尼汾概述简介, 优点派克汉尼汾简介 • 开式回路用轴向柱塞式变量液压泵 • 中压,连续工作压力280 bar • 高驱动转速型,适用于行走机械; 低噪声型,适用于工业应用 • 静音及高效的控制效能 优点 • 总结构尺寸紧凑 • 低噪声• 流量脉动小,进一步降低噪声• 采用弹性密封,不使用密封垫,从而避免外泄漏的产生• 总效率高,功耗小,减小发热• 采用带无泄漏调节装的简单变量控制器 • 符合SAE 及ISO 标准的安装法兰及油口 • 采用圆锥滚柱轴承,使用寿命长 • 全功率后驱动能力• 后部或侧面油口配置可选• 泄油口的配置对水平安装及驱动轴向上垂直安装均适用• 带有最大及最小排量调节选项 • 具有壳体至吸口单向阀选项,可延长轴封寿命 • 使用、维修方便 脉动容腔技术下列图表所示为侧向油口配置P1/PD 18, 28及45泵采用 “脉动容腔” 技术的效果,脉动容腔可降低泵出口处的压力脉动幅值40-60%,这样,无需增加成本来加装噪声缓冲元件,便可大大降低液压系统的整体噪声,P1系列 PD 系列出口压力p / bar平均压力脉动 / b a rP1 045出口压力脉动2600 rpm 无脉动容腔2600 rpm 带脉动容腔订货代号18 ml, 28 ml, 45ml派克汉尼汾P 类型 01 驱动轴 转向R 5密封材料E 油口配置0 壳体-吸口 单向阀 0 排量调节 018 排量 S 安装法兰 及油口 S 轴封 M 应用范围A 设计系列0 通轴驱动选项 C0控制选项0附加控制选项 00油漆 00修改代号系列 P D * 仅适用于045排量, “S”型安装法兰及油口00 标准型, 无修改M2 按要求修改 代号修改代号 * 适用于028及045排量 ** 仅适用于045排量 代号设计系列 A 现行设计系列5 氟碳橡胶 (FPM) 代号密封材料 A 82-2 SAE A M33x2 M27x2 BSPP 1/4”, 3/8” 101-2 SAE B M42x2 M27x2 BSPP 1/4”, 1/2” 101-2SAE B M48x2M33x2Ø38/25DN51/25BSPP 1/4”, 1/2”B ISO M33x2 M27x2 BSPP 1/4”,3/8”ISO M42x2 M27x2 BSPP 1/4”, 1/2” ISO M48x2M33x2Ø38/25DN51/25BSPP 1/4”, 1/2”代号 018排量 028排量 045排量 安装法兰及油口 安装 法兰 螺纹 油口 辅助 油口 安装 法兰 螺纹 油口 辅助 油口 安装法兰螺纹油口法兰 油口辅助 油口 S 82-2 SAE A SAE 16/12 SAE 4/6 101-2 SAE B SAE 20/12 SAE 4/8 101-2SAE B SAE 24/16Ø38/2561系列SAE 4/10M ISO M33x2 M27x2 M12x1.5 M16x1.5 ISO M42x2 M27x2 M12x1.5 M22x1.5 ISO M48x2M33x2Ø38/25DN51/25M12x1.5M22x1.5代号 018驱动轴 028驱动轴 045驱动轴 01 SAE A 11T 花键SAE B-B 15T 花键 SAE B-B 15T 花键02 SAE 19-1平键Ø0.75” SAE B-B 平键Ø1” SAE B-B 平键Ø1” 08— SAE B 13T 花键 SAE B 13T 花键 04 ISO/DIN 平键, Ø20ISO/DIN 平键, Ø25ISO/DIN 平键, Ø25 06 SAE A 9T 花键— — PD 工业液压用 代号 系列P1 行走机械用 代号 排量 018 18 ml/rev (1.10 in 3/rev) 028 28 ml/rev (1.71 in 3/rev) 045 45 ml/rev (2.75 in 3/rev) 代号 类型 P 开式回路用变量柱塞泵 U*通用 代号应用范围 S 工业液压 (PD) M 行走机械 (P1) R 顺时针 (右转)L 逆时针 (左转)代号 转向 代号 轴封 S 单唇轴封 * 并不具有控制功能,仅在运输时予以防护,详情见第7页的控制说明。
可变后掠翼的原理理论说明以及概述1. 引言1.1 概述可变后掠翼是一种飞机设计中的重要创新,它通过改变翼面形状和后缘扭转等机制实现了翼展和后掠角的可调节性。
这一设计带来了许多优势,包括提高飞行性能、增强机动性能以及适应不同飞行阶段需求等。
因此,对于可变后掠翼的原理、理论说明以及概述的深入了解具有重要意义。
1.2 文章结构本文将分为五个部分进行阐述。
首先,在引言部分将概述可变后掠翼的重要性,并介绍全文内容安排。
其次,在可变后掠翼的原理部分将详细介绍其三个关键方面:翼面形状变化原理、后缘扭转机制以及控制系统和传动装置。
接下来,在可变后掠翼的理论说明部分将阐述后掠角对飞行性能的影响,探讨其优势与应用案例,并提出稳定性和操纵性问题的解决方法。
然后,在可变后掠翼的概述部分将回顾其发展历程和应用领域,探讨设计与制造技术现状,并展望未来发展趋势和挑战。
最后,在结论部分将总结本文主要观点和结果,并提出对可变后掠翼未来发展的展望和建议。
1.3 目的本文的目的是系统地介绍可变后掠翼的原理、理论以及概述,从而使读者能够全面了解可变后掠翼在飞机设计中的重要性和应用价值。
通过对其原理进行详细说明,可以帮助读者更好地理解可变后掠翼的工作机制。
同时,通过对其理论的阐述和优劣比较,可以揭示可变后掠翼在飞行性能、机动性能等方面带来的显著优势。
最后,通过对可变后掠翼概述部分的分析,有助于读者了解其当前发展现状和未来发展趋势,并为相关领域的科学家、工程师和决策者提供有益参考。
以上为关于“1. 引言”部分内容的详细撰写,请核对确认是否满意。
2. 可变后掠翼的原理2.1 翼面形状变化原理可变后掠翼是一种飞机翼面可以在飞行中调整后掠角度的设计。
它通过改变翼面形状来适应不同的飞行阶段和任务需求。
可变后掠翼采用了一种称为“机械弯曲”的技术,通过在翼根附近安装一个或多个主动驱动机构,利用液压、电机等方式实现对整个翼面进行形状调整。
这些机构可以使得整个机翼实现向后倾斜或向前展开,并保持稳定的飞行状态。

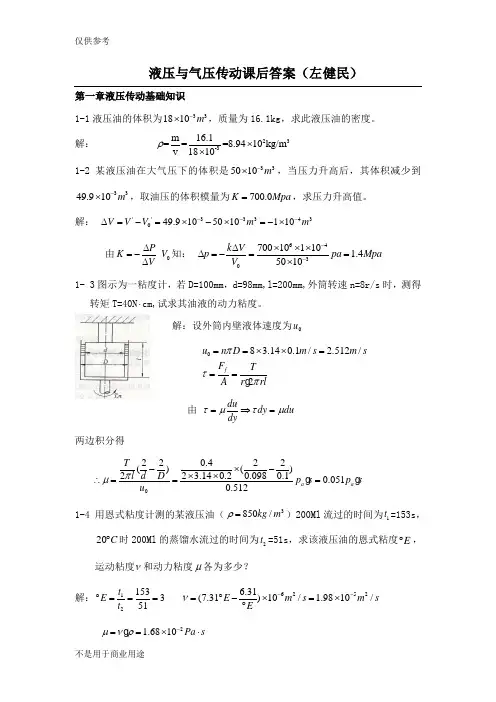
液压与气压传动课后答案(左健民)第一章液压传动基础知识1-1液压油的体积为331810m -⨯,质量为16.1kg ,求此液压油的密度。
解: 23-3m 16.1===8.9410kg/m v 1810ρ⨯⨯ 1-2 某液压油在大气压下的体积是335010m -⨯,当压力升高后,其体积减少到3349.910m -⨯,取油压的体积模量为700.0K Mpa =,求压力升高值。
解: ''33343049.9105010110V V V m m ---∆=-=⨯-⨯=-⨯由0P K V V ∆=-∆知: 643070010110 1.45010k V p pa Mpa V --∆⨯⨯⨯∆=-==⨯ 1- 3图示为一粘度计,若D=100mm ,d=98mm,l=200mm,外筒转速n=8r/s 时,测得转矩T=40N ⋅cm,试求其油液的动力粘度。
解:设外筒内壁液体速度为0u08 3.140.1/ 2.512/2fu n D m s m s F TA r rl πτπ==⨯⨯===由 dudy du dyτμτμ=⇒= 两边积分得0220.422()()22 3.140.20.0980.10.0510.512a a T l d D p s p s u πμ-⨯-⨯⨯∴===1-4 用恩式粘度计测的某液压油(3850/kg m ρ=)200Ml 流过的时间为1t =153s ,20C ︒时200Ml 的蒸馏水流过的时间为2t =51s ,求该液压油的恩式粘度E ︒,运动粘度ν和动力粘度μ各为多少? 解:12153351t E t ︒=== 62526.31(7.31)10/ 1.9810/E m s m s E ν--=︒-⨯=⨯︒ 21.6810Pa s μνρ-==⨯⋅1-5 如图所示,一具有一定真空度的容器用一根管子倒置一液面与大气相通的水槽中,液体与大气相通的水槽中,液体在管中上升的高度h=1m,设液体的密度为31000/kg m ρ=,试求容器内真空度。
在90 年代初国外绝大部分用户已以卧式千斤顶替代了立式千斤顶。
在90 年代后期国外研制出了充气千斤顶[ 2] 和便携式液压千斤顶等新型千斤顶。
充气千斤顶是由保加利亚一汽车运输研究所发明的, 它用有弹性而又非常坚固的橡胶制成。
使用时, 用软管将千斤顶连在汽车的排气管上, 经过15~ 20 秒, 汽车将千斤顶鼓起, 成为圆柱体。
这种千斤顶可以把11 5t 重的汽车顶起70cm 。
Power_Riser ? 型便携式液压千斤顶[ 3] 则可用于所有类型的铁道车辆, 包括装运三层汽车的货车、联运车以及高车顶车辆。
同时它具有一个将负载定位的机械锁定环, 一个三维机械手, 一个全封闭构架以及一个用于防止杂质进入液压系统的外置过滤器。
另外一种名为Truck Jack 的便携式液压千斤顶[ 4] 则可用于对已断裂的货车转向架弹簧进行快速的现场维修。
该千斤顶能在现场从侧面对装有70~ 125t 级转向架的大多数卸载货车进行维修, 并能完全由转向架侧架支撑住。
它适用于车间或轨道上无需使用钢轨道碴或轨枕作承。
31 2 国内发展情况我国千斤顶技术起步较晚, 由于历史的原因, 直到1979 年才接触到类似于国外卧式千斤顶这样的产品。
但是经过全面改进和重新设计, 在外形美观, 使用方便, 承载力大, 寿命长等方面, 都超过了国外的同类产品, 并且迅速打入欧美市场。
经过多年设计与制造的实践, 除了卧室千斤顶以外, 我国还研制出了新型折叠式液压千斤顶、快速升降千斤顶等多种千斤顶。
目前我国出口的千斤顶已达到门类、规格齐全, 形成系列产品。
31 3 千斤顶的分类及工作原理31 31 1 立式千斤顶和卧式千斤顶从千斤顶的外形看, 可分为立式千斤顶和卧式千斤顶。
传统的手动立式千斤顶技术成熟且轻巧价廉, 但在送入车下起顶部位和起顶时, 操作不方便; 卧式千斤顶则是一种油压千斤顶, 它可以让用户在车外方便地操作, 同时它的起顶高度低, 可达高度高, 上关键词千斤顶分类应用发展 1 引言在生产实践中我们经常会遇到一些将重物如机床、笨重的箱子、井下的轨道等在没有起吊设备的情况下移动或抬起, 仅靠人工操作是很困难的, 这就需要用到千斤顶来帮助我们。
第一章概述思考题与习题1-1说明什么叫液压传动?解:用液体作为工作介质进行能量传递的传动方式称为液体传动。
按照其工作原理的不同,液体传动又可分为液压传动和液力传动两种形式。
液压传动主要是利用液体的压力能来传递能量;而液力传动则主要利用液体的动能来传递能量。
1-2液压传动系统由哪几部分组成?试说明各组成部分的作用。
解:液压传动系统主要由以下四个部分组成:(1)动力元件将原动机输入的机械能转换为液体压力能的装置,其作用是为液压系统提供压力油,是系统的动力源。
如各类液压泵。
(2)执行元件将液体压力能转换为机械能的装置,其作用是在压力油的推动下输出力和速度(或转矩和转速),以驱动工作部件。
如各类液压缸和液压马达。
(3)控制调节元件用以控制液压传动系统中油液的压力、流量和流动方向的装置。
如溢流阀、节流阀和换向阀等。
(4)辅助元件除以上元件外的其它元器件都称为辅助元件,如油箱、工作介质、过滤器、蓄能器、冷却器、分水滤气器、油雾器、消声器、管件、管接头以及各种信号转换器等。
它们是一些对完成主运动起辅助作用的元件,在系统中也是必不可少的,对保证系统正常工作有着重要的作用。
1-3液压传动的主要优、缺点是什么?解:1.液压传动的优点(1)液压传动容易做到对速度的无级调节,且其调速范围大,并且对速度的调节还可以在工作过程中进行;(2)在相同功率的情况下,液压传动装置的体积小、重量轻、结构紧凑;(3)液压传动工作比较平稳、反应快、换向冲击小,能快速起动、制动和频繁换向;(4)液压装置易实现自动化,可以方便地对液体的流动方向、压力和流量进行调节和控制,并能很容易地与电气、电子控制或气压传动控制结合起来,实现复杂的运动和操作;(5)液压传动易实现过载保护,液压元件能够自行润滑,故使用寿命较长;(6)液压元件易于实现系列化、标准化和通用化,便于设计、制造和推广使用。
2.液压传动的缺点(1)液体的泄漏和可压缩性使液压传动难以保证严格的传动比;(2)液压传动在工作过程中能量损失较大,因此,传动效率相对低,不宜作远距离传动;(3)液压传动对油温变化比较敏感,不宜在较高和较低的温度下工作;(4)液压系统出现故障时,不易诊断。
Academic Forum416《华东科技》航空机电作动器研究现状刘成力,王志胜(兰州工业研究院,甘肃 兰州 730050)摘要:机电作动器(Electro-Mechanical Actuator,EMA)由于其构造紧凑,取消液压管路等优点,在航空领域有着极高的应用价值。
本文阐述了国内外EMA的研究现状,详细介绍了国外的研究计划以及典型的EMA产品,并对国内外EMA的指标进行分析。
最后总结了国内EMA研究的短板和技术发展方向。
关键词:机电作动器;航空;综述目前,飞机上除了发动机主能源外,还存在电能、液压能等多种形式的次级能源。
为了减少次级能源种类,解决多种能源形式共存导致的发动机附件复杂、安装空间紧张、维护操作不便等问题,多电/全电飞机的概念应运而生,波音787、空中客车A380、F-35是典型的多电飞机[1]。
随着航空领域多电/全电技术的发展,一个重要特征是用紧凑、可靠的电作动系统来替代大量的液压动力系统[2-4],功率电传作动器的应用使空中客车公司A320客机机身减轻100 kg,A380客机机身减轻450 kg。
机电作动器(Electro-Mechanical Actuator,EMA)[6]。
本文对航空机电作动系统的研究现状进行了综述,重点介绍了国外代表研究机构及其典型的EMA作动器,回顾国内EMA的技术研发现状,在此基础上,对未来EMA的技术发展方向进行总结和展望。
1 国外研究现状20世纪80年代,美国国家航空航天局NASA就立项进行EMA专题研究,预期为未来全电飞机的发展奠定基础[1],并于1998年在F/A-18B上进行飞行试验。
近年来,为了提升EMA的可靠性,NASA 开展健康管理技术研究,主要包括故障诊断及寿命预测[2,3]。
1990年至1992年,在欧盟FP2-AERO 0C的支持下,欧盟开展All Electric Aircraft Flight Control Actuation研究项目。
基于负载自适应的高升力系统高效液压驱动技术 康建强;史佑民;王家庆 【摘 要】民用飞机对经济性特别关注,大型民用飞机高升力系统工作时间虽短,但消耗功率却很大,可达到主飞控作动系统的3倍以上.传统的飞机高升力系统普遍采用节流控制的液压驱动方案,导致液压驱动效率低.介绍了高升系统应用的4种典型液压驱动方案,阐述了应用变排量液压马达的高效液压驱动理念,对4种方案进行了建模和仿真分析.结果 表明,变排量液压马达驱动系统比其他方案的综合效率高21%以上,为国内科技人员研发大型民用飞机高升力系统提供参考.
【期刊名称】《液压与气动》 【年(卷),期】2019(000)009 【总页数】8页(P93-100) 【关键词】高升力系统;动力驱动装置;变排量液压马达;容积控制;负载自适应 【作 者】康建强;史佑民;王家庆 【作者单位】庆安集团有限公司航空设备研究所,陕西西安710077;庆安集团有限公司航空设备研究所,陕西西安710077;庆安集团有限公司航空设备研究所,陕西西安710077
【正文语种】中 文 【中图分类】TH137
引言 高升力系统只在飞机起飞和降落阶段工作,系统从一个极限位置全偏到另一个极限位置的时间大约为30~40 s,工作时间虽然很短,但消耗功率却很大,可达到主飞行控制系统功率的3倍以上。为了满足高升力系统短时工作的功率需求,并且尽量不影响飞机其他系统的工作,飞机液压系统不得不按短时需求设计,造成飞机液压能源在绝大部分工作时间的输出功率过于富裕,造成能源浪费[1]。 现代大型民用飞机高升力系统的动力驱动功能是由动力驱动装置实现的,传统液压动力驱动装置大多采用阀控定排量液压马达方案,节流控制方案使得液压阀块结构复杂,并且在实现功能的过程中导致大量能量损失。以常用的电液伺服阀控液压马达系统为例,其最高效率约为40%。 大型民用飞机高升力系统的性能直接影响飞机的市场竞争力[2],因此,提升动力驱动装置的效率以降低功率需求,对提高飞机经济性和市场竞争力具有重要的意义。 1 动力驱动装置介绍 动力驱动装置安装于高升力系统襟翼/缝翼的中间位置,用于驱动高升力系统到达指定的位置(符合规定的时间、速度、角度等),并根据指令实现高升力系统的制动和把持,典型的高升力系统结构布局如图1所示[3]。 1、7.翼尖制动器 2.缝翼运动机构 3、14.齿轮旋转作动器 4.控制手柄 5.高升力系统电子控制装置 6.缝翼 8.襟翼 9、11、12.角齿轮箱 10.动力驱动装置 13.襟翼运动机构 15.位置监测装置图1 典型的高升力系统结构布局 高升力系统的动力驱动装置通常采用双动力源构型,通过速度综合后输出。由于液压动力驱动装置具有输出功率大、体积小、重量轻、技术成熟等优点,因此现代大型民用飞机高升力系统都采用双液压或液电混合驱动的方案[1]。典型的液电混合动力驱动装置的结构如图2所示。 2 典型的节流控制液压驱动系统 2.1 电液伺服阀控定排量液压马达驱动系统 该方案采用电液伺服阀控制液压马达的流量,通过速度传感器实现对液压马达速度的闭环控制,其原理如图3所示。 该方案具有技术成熟高、可靠性高、运动品质好的优点。对控制系统要求较高,同时受大流量电液伺服阀元件的技术限制,在宽体飞机中的应用受限。 图2 典型的液-电混合动力驱动装置结构 1.油滤 2.关闭阀电磁阀 3.关闭阀 4.压力传感器 5.制动器电磁阀 6.电液伺服阀 7.液压马达 8.掉压制动器 9.速度传感器图3 电液伺服阀控定排量液压马达驱动系统原理图 国产的C919飞机高升力系统就采用了该方案。 2.2 液压调速式定排量液压马达驱动系统 该方案采用流量控制阀对系统流量进行自适应调节,进而实现对液压马达的速度控制,其原理如图4所示。 该方案具有结构简单、可靠性高、控制简单的优点,在一定的负载变化范围内其流量和速度受影响较小。在顺载工况下,该方案速度受负载影响较大,系统启动及高低速转换时冲击较大,影响飞机的飞行品质。B-777、B-787飞机均采用了该方案[4]。 2.3 固定节流式定排量液压马达驱动系统 该方案采用固定节流口对流量进行限制,进而实现对液压马达的速度限制,其原理如图5所示。 1.油滤 2.关闭阀电磁阀 3.关闭阀 4.高-低速电磁阀 5.高-低速阀 6.流量控制阀 7.制动器电磁阀 8.伸出方向电磁阀 9.收回方向电磁阀 10.方向控制阀 11.液压马达 12.掉压制动器图4 液压调速式定排量液压马达驱动系统原理图 1.油滤 2.制动器电磁阀 3.高-低速电磁阀 4.伸出方向电磁阀 5.收回方向电磁阀 6.主控阀 7.液压马达 8.掉压制动器图5 固定节流式定排量液压马达驱动系统原理图 该方案具有结构简单、可靠性高、控制简单的优点。系统速度和流量随负载变化,影响飞机的飞行品质,需要设置功率限制装置以限制高升力系统的流量。 早期的高升力系统大多采用该类方案,A-340飞机和国产的AG600飞机均采用了该方案。 3 基于负载自适应的变排量液压马达驱动系统 该方案采用容积控制方法,通过电液伺服阀控制液压马达的排量变化,实现对液压马达输出速度和扭矩的控制,其原理如图6所示。 该方案具有结构简单、效率高、运动品质好的优点,但控制系统较复杂,成本较高,可靠性低于其他方案[5]。 A-380飞机高升力系统首次采用该技术,其最大流量需求只有固定节流式定排量液压马达驱动系统的47%,在后续的A-350飞机中空客公司继续采用了该技术,并通过设置力矩传感器首次实现了高升力系统输出力矩的主动控制,大幅降低了高升力系统的故障卡滞载荷。 1.油滤 2.关闭阀电磁阀 3.关闭阀 4.压力传感器 5.溢流阀 6.制动器电磁阀 7.电液伺服阀 8.马达斜盘角度传感器 9.变排量液压马达 10.马达斜盘作动活塞 11.掉压制动器 12.速度传感器图6 变排量液压马达驱动系统原理图 4 液压驱动系统建模和仿真 4.1 主要液压元件数学模型 1) 定排量液压马达数学模型 定排量液压马达流量方程为:
(1) 式中, Qm —— 液压马达进油腔流量 Ctm —— 液压马达总泄漏系数 pm —— 液压马达进-回油口压力差 Dm —— 液压马达排量 θm —— 液压马达输出轴转角 V0 —— 液压马达工作腔总容积 βe —— 有效容积弹性模量 定排量液压马达扭矩方程为[6]:
(2) 式中, Mm —— 液压马达输出力矩 Jm —— 转动惯量 Bm —— 黏性阻尼系数 G —— 负载扭转刚度 ML —— 液压马达负载力矩 2) 变排量液压马达数学模型 变排量液压马达原理见图7。 图7 变排量液压马达原理图 由于变排量液压马达的排量与变排量作动活塞的位移成正比,因此:
(3) 式中, Dmmax —— 液压马达最大排量 x1 —— 变排量作动活塞的位移 x1max —— 变排量作动活塞的最大位移 变排量液压马达的流量和力矩是由排量决定的。在一定的压差下,变排量液压马达力矩为: (4) 根据式(2)、式(4)可得到变排量液压马达的扭矩方程为:
根据式(1)、式(3)可得到变排量液压马达的流量方程为: (6) 变排量作动活塞的速度为:
(7) 式中, Qsv —— 电液伺服阀流量 A1 —— 变排量作动活塞面积 电液伺服阀流量方程为: Qsv=Kq1·Isv-Kp1·Δpsv (8) 式中, Kq1 —— 电液伺服阀空载流量-电流系数 Isv —— 电液伺服阀电流 Kp1 —— 电液伺服阀流量-压力系数 Δpsv —— 电液伺服阀负载压差 3) 方向控制阀、主控阀数学模型 系统中的方向控制阀和主控阀均采用了直线圆柱滑阀结构(四通滑阀),其结构见图8。 图8 四通滑阀结构图 理想的零开口四通滑阀的线性化流量方程为: Qv1=Kq2·xv1-Kq2·Δpv1 (9) 式中, Qv1 —— 阀的流量-压力增益 Kq2 —— 阀的空载流量增益 x2 —— 阀芯位移 Kp2 —— 阀的流量-压力增益 Δpv1 —— 负载压差 4) 流量控制阀数学模型 流量控制阀是实现系统恒速运动的关键元件,由节流阀和定差减压阀组合而成,其结构见图9[7-8]。 1.弹簧 2.阀芯 3.阀体图9 流量控制阀结构图 流量控制阀的流量方程为[9-10]:
(10) 式中, Qv2 —— 流量调节阀的流量 A2 —— 固定节流孔面积 C —— 固定节流孔流量系数 KW —— 弹簧刚度 x3 —— 弹簧预压量 x4 —— 阀芯位移 ρ —— 液压油密度 A3 —— 阀芯受液压力面积 由公式可见,流量控制阀的流量变化范围是由变量(x3+x4)决定的,由于阀芯的位移x4相比于弹簧的预压缩量x3很小,因此变量(x3+x4)的变化量很小,所以流量控制阀的流量可以保持恒定[11]。 4.2 基于AMESim的建模及仿真 1) 系统设计需求 以某型飞机高升力系统动力驱动装置的需求为例,作为建模的输入条件,详见表1、图10和图11。 表1 系统设计需求项目参数额定供油压力/MPa35管路压力损失/MPa2回油压力/MPa0.5 转动惯量液压马达输出端0.0034 kg·m2 图10 转速曲线 图11 载荷曲线 图12 电液伺服阀控定排量液压马达驱动系统模型 2) 建模和仿真参数设置 根据4种液压驱动系统的方案和设计需求,建立基于AMESim的模型,见图12~图15[12],仿真参数见表2~表5。 图13 液压调速式定排量液压马达驱动系统模型 图14 固定节流式定排量液压马达驱动系统模型 图15 变排量液压马达驱动系统模型 4.3 仿真结果分析 根据上述模型和参数,4种方案的输出速度见图16、图17,根据速度曲线可见: (1) 电液伺服阀控定排量液压马达驱动系统和变排量液压马达驱动系统在顺载、逆载工况下的输出速度与要求的曲线基本一致; 表2 电液伺服阀控定排量液压马达驱动系统仿真参数项目参数PID参数比例增益0.45积分时间常数1微分时间常数0速度传感器增益0.01电液伺服阀电流/mA40 名义流量/L·min-1135 液压马达排量/mL·r-113 容积效率0.9机械效率0.9