一种分析微悬臂梁大挠度变形的新算法
- 格式:pdf
- 大小:341.47 KB
- 文档页数:5
梁挠度概述在工程设计和结构力学中,梁挠度是用来描述梁结构在受力过程中产生的变形和变形程度的指标。
梁在受到外力作用时会产生弯曲,而梁挠度则是描述梁在弯曲过程中产生的变形。
梁的挠度对于结构的稳定性和强度至关重要,因此对梁挠度的研究和分析在工程实践中具有重要意义。
梁挠度的定义梁挠度是指梁在受到外力作用下,沿梁轴方向变形的程度。
它可以用来衡量梁的变形和变形程度,并且可以通过运用结构力学的原理进行计算和分析。
梁挠度通常用变形函数来描述,变形函数是描述梁在受力过程中的纵向位移与横截面位置之间的关系。
变形函数可以是一维方程,也可以是多维方程,具体取决于梁的几何形状、受力情况和约束条件。
梁挠度通常可以根据悬臂梁和简支梁的支座反力、力矩和弯曲刚度来计算。
对于简支梁来说,梁挠度是根据梁的长度、梁截面的细节、材料性质和载荷情况来计算的。
对于悬臂梁来说,梁挠度是根据梁的长度、梁截面的细节、材料性质、支座反力和载荷情况来计算的。
梁挠度的计算方法梁挠度的计算可以通过使用结构力学的理论和公式来进行。
常见的梁挠度计算方法包括:1. 欧拉-伯努利梁理论欧拉-伯努利梁理论是一种常见的梁挠度计算方法,适用于纤维轴的细长梁。
该理论假设梁是轻质、刚性和弹性的,且其弯曲和轴向变形相互独立。
根据该理论,梁的挠度可以通过使用微分方程或积分方程来求解。
2. 矩比法矩比法是一种常用的梁挠度计算方法,适用于计算较简单的梁结构。
该方法基于力矩平衡原理,通过求解梁的弹性曲线方程来计算梁的挠度。
该方法可以简化梁挠度的计算过程,但适用范围有一定限制。
3. 力法力法是一种常见的梁挠度计算方法,适用于复杂的梁结构。
该方法通过建立梁的等效载荷模型,将梁的挠度计算问题转化为求解等效载荷下的静力平衡问题。
通过求解这个平衡问题,可以得到梁的挠度。
4. 有限元法有限元法是一种广泛应用于工程结构分析的数值计算方法,也可以用来计算梁的挠度。
该方法将梁划分为多个小单元,并在每个单元内建立适当的数学模型。
挠度计算例题
为了解答您的问题,我们首先需要知道定义"挠度"是指弹性体在受到外力作用下发生形变时的偏移量,即物体的弯曲程度。
挠度计用来测量物体弯曲的程度。
以下是一个例题:
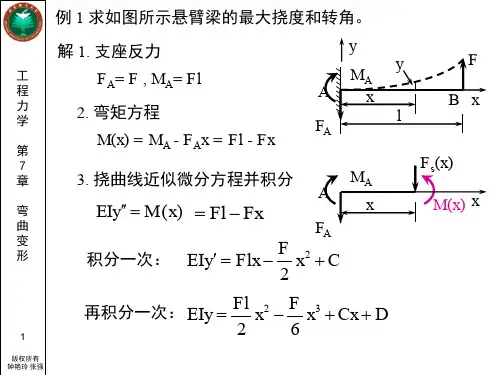
假设有一根长度为L的均匀悬臂梁(只有一端固定,另一端自由),受到一个向下的集中力F作用在梁的自由端上。
我们希望计算该悬臂梁的挠度。
首先,我们需要知道四个参数:
1. 梁的长度L
2. 集中力F的大小
3. 梁的弯曲刚度EI (E为弹性模量,I为截面惯性矩,测量悬臂梁材料的抗弯能力)
4. 材料的横向拉伸系数v (悬臂梁材料的纵向和横向伸缩性之间的比例)
根据理论分析和边界条件,可以得到悬臂梁的挠度公式为:d = (dd^3)/(3dd)
其中,
- d为悬臂梁的挠度
- F为作用在悬臂梁自由端的集中力
- L为悬臂梁的长度
- E为悬臂梁材料的弹性模量
- I为悬臂梁的截面惯性矩
根据给定的参数,将其代入公式即可计算出悬臂梁的挠度。
悬臂梁的受力分析悬臂梁是一种常见的结构形式,它常用于建筑、桥梁、机械设备等领域。
悬臂梁的受力分析是设计和计算中必不可少的一部分,其目的是确定悬臂梁在外力作用下的内力分布和变形情况,以保证结构的稳定性和安全性。
悬臂梁是一种单支撑结构,其一个端点固定,另一个端点悬空。
在静力学中,我们可以通过等效系统的方法将悬臂梁简化为一根杆件,在杆件内部发生的剪力、弯矩和轴力可以通过力的平衡和力的偶平衡方程来计算。
悬臂梁的主要受力包括弯矩和剪力。
弯矩是悬臂梁上各点处的力偶矩,它使悬臂梁发生弯曲变形。
剪力是悬臂梁上各点处的水平力,它使悬臂梁上的材料发生剪切变形。
在进行悬臂梁的受力分析时,我们需要做以下几个步骤:1.确定悬臂梁上的受力。
首先要明确悬臂梁所受的外力,包括集中力、分布力和弯矩。
这些外力可以通过静力学的原理和条件来确定。
2.画出悬臂梁的受力图。
根据外力和支反力平衡的条件,我们可以得到悬臂梁上各点的受力图。
在受力图中,我们可以标注出各点处的剪力和弯矩大小,以及它们的方向。
3.计算悬臂梁上各点处的剪力和弯矩。
根据杆件内力平衡的原理,我们可以利用力的平衡和力偶平衡方程来求解悬臂梁上各点处的剪力和弯矩大小。
这些方程应根据实际情况进行选择和应用。
4.绘制悬臂梁的剪力图和弯矩图。
根据上一步得到的各点处的剪力和弯矩大小,我们可以绘制出悬臂梁的剪力图和弯矩图。
在图中,我们可以清楚地看到剪力和弯矩的分布情况。
5.计算悬臂梁的最大剪力和弯矩。
通过剪力图和弯矩图,我们可以确定悬臂梁上最大的剪力和弯矩。
这些值对结构的安全性和安全系数的计算非常重要。
6.计算悬臂梁的挠度。
悬臂梁在外力作用下会产生挠度,我们可以利用悬臂梁上的弯矩曲率关系来计算其挠度大小。
这些计算可以借助微分方程或者退化曲线方法进行。
需要指出的是,悬臂梁的受力分析是一项复杂的工作,计算结果会受到许多因素的影响,如外力的大小、形状和分布;结构的材料和几何形状等。
因此,在进行悬臂梁的受力分析时,必须充分考虑这些因素,并进行适当的假设和近似。
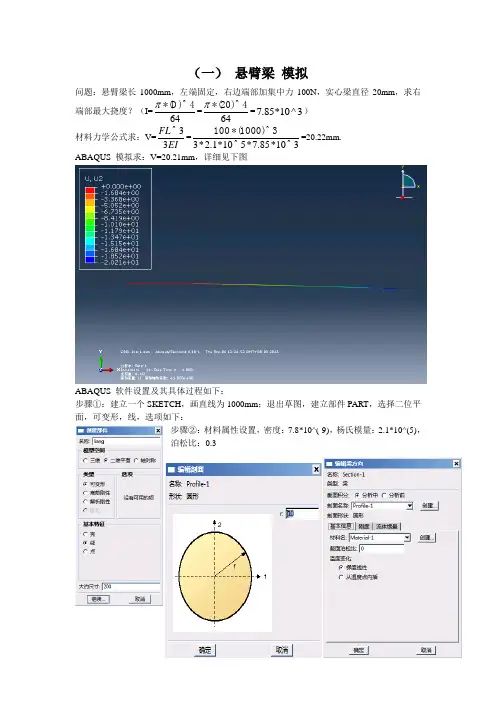
(一) 悬臂梁 模拟
问题:悬臂梁长1000mm ,左端固定,右边端部加集中力100N ,实心梁直径20mm ,求右端部最大挠度?(I=
64π*(D )^4=
64π*(20)^4
=7.85*10^3)
材料力学公式求:V=33FL EI ^=3*2.1*105*7.85*103
100*(1000)^3
^^=20.22mm.
ABAQUS 模拟求:V=20.21mm ,详细见下图
ABAQUS 软件设置及其具体过程如下:
步骤①:建立一个SKETCH ,画直线为1000mm ;退出草图,建立部件PART ,选择二位平面,可变形,线,选项如下:
步骤②:材料属性设置,密度:7.8*10^(-9),杨氏模量:2.1*10^(5),泊松比:0.3
编辑梁方向及其指派梁方向见上图。
步骤③:装配,分析步建立,初始步长设置为0.01,载荷加载见下。
步骤④:总体布种20,直接划分网格即可,创立JOB,进行运算。
计算结果见上图。
燕山大学:杨建2012-09-06 编辑。
2008年第27卷第7期传感器与微系统(TransducerandMicrosystemTechnologies)93
彳铲pppp妯§计算与测试譬■、■9一一一《^、o’
一种分析微悬臂梁大挠度变形的新算法唯陆静,向宇,马晓强(广西工学院汽车工程系。广西柳州545006)
摘要:考虑静电力边缘效应的影响,建立了微悬臂梁大挠度变形的静态变形分析模型,通过梁弯曲理论将控制方程化为一阶非线性微分方程组,结合非线性方程组求根、迭代修正齐次扩容精细积分法和增量迭代法,提出了一种分析微悬臂梁大挠度变形的半解析、半数值算法。数值算例表明:该方法具有较高的精度和稳定性,是分析微悬臂梁变形的一种有效方法;通过对微梁静态特性的分析表明:考虑边缘效应后微梁的吸合电压减小,考虑大挠度变形的影响后微梁的吸合电压增加。关键词:微悬臂梁;打靶法;迭代修正齐次扩容精细积分法;增量迭代中图分类号:TP211文献标识码:A文章编号:1000--9787(2008)07--0093-03
Novelmethodforanalyzinglargedeflection^n幂netormationOrmicro-cantilevers
LUJing,XIANGYu,MAXiao-qiang
(DepartmentofAutomobileEngineering,GuangxiUniversityofTechnology,Liuzhou
545006,China)
Abstract:Consideringtheinfluenceofelectrostaticforceedgeeffect,amodelisestablishedtoanalyzethestatic
deformationofmicro—cantileverwithlargedeflection,andthecontrolequationschangedtofirstordernonlineardifferentialequationsaboutthebeambendingtheory.Asemi·analyticalsemi·numericMmethodispresentedforanalyzingmicro-cantileverdeformationbymeansofthehighprecisioniterativerefinementextendedhomogeneouscapacityintegrationmethod,nonlinearequationssolutionandincrementaliterativealgorithm.Numericalcalculatedresultsshowthatthemethodhasupperprecisionandstability,whichisaneffectivemethod
toanalyze
thedeformationofmicro-cantilever.Staticcharacteristicsshowthatthepull-involtagedecreaseswhen
edgeeffectsareconsidered,andthepull—in,≯ohageincreaseswhentheinfluenceoflargedeflectionisconsidered.Keywords:micro-cantilever;shootingmethod;iterativerefinementextendedhomogeneouscapacityintegrationmethod:incrementaliterative
0引言近年来,微悬臂梁在光开关、微传感器等微机械器械中得到了广泛应用,精确地分析微梁的变形对于微机械装置的设计和更好地控制其工作特性有重要意义。微梁的变形是典型的静电一结构耦合问题,通常采用有限元求解¨’21。有限元法应用广泛,但存在计算效率低,操作复杂的缺点,因此,一些学者提出了分析微梁变形的数值方法¨1,如贾建援等人建立了静电力作用下微悬臂梁的机一电耦合数学模型【4J,并利用叠加法的原理提出了一种数值方法,但由于未考虑边缘效应的影响。只适用于宽梁,而且,由于采用交错迭代,在某些情况下可能会导致计算无法收敛。本文考虑了静电力边缘效应和梁大挠度弯曲的影响,建立了静电致动微悬臂梁的力学模型,导出了微悬臂梁大挠度变形
收稿日期:2008--03-18·基金项目:广西自然科学基金资助项目(0481028)
的控制方程。同时,还根据打靶法的原理,结合迭代修正齐次扩容精细积分法和非线性代数方程组的求根,通过增量迭代方法提出了一种分析微悬臂梁变形的高精度算法,并采用该方法分析了微梁的变形。通过与有限元结果的比较,证明本文所提出的方法具有较高的精度,可以适合于任何宽度的微梁。1微梁静力学模型图1为微悬臂梁结构示意图,图中,L,h,b,d分别为梁的长度、厚度、宽度和变形前梁与固定极板的距离。
图1微悬臂梁结构示意图Fig1Structurediagramofmicro-cantilever
传感器与微系统第27卷考虑边缘效应的影响后,静电分布力的集度可以表示为‘51g=茄鲁(1+而d--lAJ),(1)式中y为所加的电压;s为介电常数;埘为梁的挠度。显然,式中第一项为不考虑边缘效应时平行板电容的静电力计算公式,第二项为边缘效应所产生的静电力附加项。由于微悬臂梁自由端在z方向上不受约束,轴力为0,微梁在大挠度弯曲时的载荷、内力之间的关系与小挠度弯曲时相同mJ,可表示为警邗訾=Q,(2)式中Q,M分别为梁的剪力和弯矩。在大挠度弯曲时,梁的挠曲线微分方程为1MpE/d2埘血2[1+(蝴手’由薄板大挠度弯曲时的物理方程得‘6]以。亩(M—川),(8)
岛2亩(以训),(9)
式中t为板的厚度;ⅣI,M分别为z和Y方向上的中面内力。将薄板模型退化成一维梁模型,不考虑Y方向的变形,由式(7)可知,占,=O。悬臂梁自由端在x方向上不受约束,M=O。代入式(9)可得札=O。由于M=M=0,由式(8)可得占,=O,代入式(6)即可求出纵向位移的表达式u=一fi一2\-d—x]2出=一fl弘2,(10)
式中z为弯曲时纵向的实际长度;u为梁在纵向的位移。令“=沈,式(10)可化为瓦=一r‘吾2鸳(3)2数值计算方法
式中伽为梁的挠度;E为弹性模量;,为惯性矩,对于矩形截面梁,,=bh3/12。梁弯曲时转角和挠度可表示为dw五2妒(4)
结合式(1)一式(4),并令髫=弘,卸=砚,妒=-6,Q=
可EI--u,Jlf=iEl肘-,则微悬臂梁的控制方程可化为料O0100(1+_2)手OO6占£y2Eh3(d/L一面)2料
(-+而再d/L丽--w)OO0
.(5)式(5)即是分析微梁大挠度变形的静力学方程。显然,微梁的控制方程是一个耦合的一阶非线性微分方程。微梁的长度会直接影响微梁静电力和边界条件,许多文献在建立微梁模型时采用小挠度弯曲模型,忽略梁的纵向位移,认为梁在弯曲时石方向的长度为定值。试验表明:微悬臂梁在吸合时,自由端挠度通常接近或超过梁的厚度,此时采用小挠度模型是不恰当的,在微悬臂粱的静态分析中,应该考虑大挠度变形时各点挠度所引起的纵向位移。由薄板大挠度弯曲时的几何方程可得哺。厶:譬+下1Ii01012,(6)厶2i+丁IiJ,(6’占,=考+÷(等)2.(,)(11)微梁的变形是一个两点边值问题,微悬臂梁在固定端的转角和挠度均为零,剪力和弯矩未知;在自由端的转角和挠度未知,剪力和弯矩为零。设G=【Ql川,MI刊】T,则微悬臂梁自由端的边界条件可表示为G=O.(12)本文作者近期提出的迭代修正齐次扩容精细积分法具有较高的计算精度和效率【71,对于非齐次项没有任何的限制,非常适合于求解非线性方程组。但精细积分法只适用于初值问题,因此,采用打靶法的思想将微梁的边值问题转化为初值问题:先假设膏=0处的剪力和弯矩值,令z=【Q,J,lo,M,I。卸]7,则初始向量的值p=[z,0,0]7为已知,即可利用迭代修正齐次扩容精细积分法解式(5),求出菇=f端的剪力、弯矩,即G=【Ql州,肘I川】T。可见G是隐含:的非线性方程组。若计算出来的G不能满足式(12),则调整z重新计算,重复上述过程直至满足边界条件为止,即求式(12)的根。本文采用逆Broyden秩l方法解式(12),求根的迭代公式为M1∥“=:‘一H}GI(z‘)L制圹鼢。)帛’03’
式中k为迭代的次数;仇为初始矩阵;s。为变量误差;),。为函数误差,即第k次和第k-1次迭代计算出来的挠度和转角的差值。逆Broyden秩1法对初值很敏感,只有当假定的初值靠近方程的解时才能保证计算的精度和稳定性。而且,在考虑了大挠度弯曲的影响后,粱的长度在加载过程中是不断变化的,静电力的大小和边界条件也会随之改变。为保证求解的可靠性,本文采用了增量迭代的方法,原理如下:
第7期陆静,等:一种分析微悬臂梁大挠度变形的新算法将电压在[0,V]内均匀分成儿段,在v0=0时,粱没有载荷,向量‰=[0,0,0,0]。一定是微梁初向量的真值,梁的长度为原长L,转角为0。给电压一个微小的增量AV,只要其值足够小,z0。=[0,0]1(上标表示在一个载荷步内的迭代次数,下标表示载荷步)一定在式(12)根的较小邻域内,令f=£,-6(石)=o,以:?为迭代初值,由打靶法求出在第一
个电压增星时的剪力和弯矩的真值:j,将初向量真值v?带入式(5)求出梁上的转角石(f),代入式(11)即可求出在第1个电压增量内梁的纵向位移,进而求出梁的实际长度2。;f。,石。(f)分别作为第二个增馈区间中梁的长度和转角函数,z?为迭代初值乞0,利用打靶法求出第二个电压增量的刁,f:和石。(f);…;通过逐步增加载荷的方式最终可求出Vn=y时x=O处的剪力和弯矩,从而得到固定端全部初向量值,最后,再通过迭代修正齐次扩容精细积分法就可以分析微梁的变形。具体求解步骤如下:1)将电压在[0,V]内均匀分成n段,令%=0,每段内的电压增量为AV=V/n;2)在电压的第一个增量中,f-L,Vl=%+AV,石=o,迭代初始近似值z:=[0,0】7,将初向量v?=[:?,0,0】7和_0(孝)代入式(5),用迭代修正齐次扩容精细积分法求出石=f处的Q和肘。若不满足式(12),则利用式(12)修正,将第一次修正后的z:代人p:,再次计算互=f处的Q和肘,若仍不满足边界条件则重新修正、计算直至满足式(12)为止。通过以上方法,可求出在第一个电压增量内的【Q。l;I。,肘,I,;。]T,即::,进而得到在第一个电压增量内的初向量真值v?。将V?代人式(5),求出转角石。(f),再将石。(f)带入式(11)求出u。,则z。=£(1一u。);3)增加电压,在第i个电压增量中,2=f。一。,K=vo"4-iAV,石=石H(手),迭代初值。?=f一。,按第二步的方法求出第i个电压增量的初向量真值y。’,fi和蟊(f);4)增加电压,重复第三步直至K=V,求出初向量真值yf,最后代人控制方程组分析微梁的静态特性。在上述算法中,只要选择合适的增量,就可以保证求解的精度和稳定性。3数值算例采用图1所示的微悬臂梁模型,材料几何参数如表1。表1材料几何参数表Tab1Materialgeometricparameters微粱长度L微赡宽度6微梁厚度h初始『日J距d介中常数s弹性梭虽E854×10一]2Wm在不同的驱动电压下考虑边缘效应的影响,采用大挠度弯曲模型计算出的微梁挠曲线如图2所示。由图2可以看出:随着电压的增加,挠曲线的不均匀性逐渐增大,体现了微梁非线性耦合变形的特点。当电压增乒宝专x/10-%图2微悬臂梁的挠曲线Fig2Micro·cantileverdeflection加到一临界值时,系统不能保持稳定平衡状态,在静电力的作用下微梁产生吸合现象。吸合电压是静电式微梁设计的一个重要参数,在不考虑边缘效应,采用小挠度模型时(非线性项只取第一项,传递矩阵中不考虑转角的影响,不考虑梁长度的变化),取不同宽度,采用本文算法所计算出来的吸合电压与文献[4]计算结果的比较如表2所示。表2吸合电压和文献值的比较Tab2Comparisonofpull·involtagewithdocumentresult粱的宽度(m)2×10—1