基于混合高斯背景模型和四帧差分法的目标检测方法
- 格式:pdf
- 大小:1.63 MB
- 文档页数:5
视频检测和运动目标跟踪方法总结目前常用的视频检测方法可分为如下几类:光流法,时域差分法,背景消减法,边缘检测法,运动矢量检测法[2]。
一、光流法光流法[1]是一种以灰度梯度基本不变或亮度恒定的约束假设为基础对运动目标进行检测的有效方法。
光流是指图像中灰度模式运动的速度,它是景物中可见的三维速度矢量在成像平面上的投影,表示了景物表面点在图像中位置的瞬时变化,一般情况下,可以认为光流和运动场没有太大区别,因此就可以根据图像运动来估计相对运动。
优点:光流不仅携带了运动目标的运动信息,而且还携带了有关景物三维结构的丰富信息,它能够检测独立运动的对象,不需要预先知道场景的任何信息,并且能够适用于静止背景和运动背景两种环境。
缺点:当目标与背景图像的对比度太小,或图像存在噪音时,单纯地从图像灰度强度出发来探测目标的光流场方法将会导致很高的虚警率。
且计算复杂耗时,需要特殊的硬件支持。
二、时域差分法时域差分法分为帧差法和改进的三帧双差分法。
1.帧差法帧差法[8]是在图像序列中的相邻帧采用基于像素点的时间差分, 然后阈值化来提取出运动区域。
视频流的场景具有连续性,在环境亮度变化不大的情况下,图像中若没有物体运动,帧差值会很小;反之若有物体运动则会引起显著的差值。
优点:时域相邻帧差法算法简单,易于实现,对背景或者光线的缓慢变化不太敏感,具有较强的适应性,能够快速有效地从背景中检测出运动目标。
缺点:它不能完全提取运动目标所有相关像素点,在运动实体内部不容易产生空洞现象。
而且在运动方向上被拉伸,包含了当前帧中由于运动引起的背景显露部分,这样提取的目标信息并不准确。
2.三帧双差分法三帧双差分法与相邻帧差法基本思想类似,但检测运动目标的判决条件上有所不同。
三帧双差分较两帧差分提取的运动目标位置更为准确。
三、背景消减法背景消减法[4]是将当前帧与背景帧相减,用阈值T判断得到当前时刻图像中偏离背景模型值较大的点,若差值大于T则认为是前景点(目标);反之,认为是背景点,从而完整的分割出目标物体。
说明1、如果直接套用本模版(懒人的最佳选择),最后论文定稿后这些红字要删除(本页也是要删除的);黑色字为固定性内容(可直接采用);蓝色字为可变性内容(需要替换成你的实际内容)。
2、学位论文中要通过插入word“分节符”来划分“word节”(“word节”概念不同于通常意义下的“章节”概念,“分节符”能够使各“word节”有不同页眉、页码)。
这是格式排版一般人不熟悉的word软件重点、难点技巧。
3. 重点关注要素:标题级数最多三级,字体格式,段落格式,图、表、公式。
请至少把本文所有红色字都看一遍。
硕士学位论文(小二号黑体)学位论文题名(二号黑体字)学位论文英文题名(小二号Times New Roman)学科专业一级学科名称(三号宋体)研究方向二级学科或三级学科名称(三号宋体)(自主设置二级学科和自主设置交叉学科须括号注明)作者姓名×××(三号宋体)指导教师×××(三号宋体)中南大学(小三号宋体)二〇一六年五月(小三号宋体)中图分类号学校代码10533 UDC 学位类别(学术学位或专业学位)硕士学位论文(小二号黑体)学位论文中文题名(小二号黑体字)学位论文英文题名(小二号Times New Roman)作者姓名:某某某(三号宋体)学科专业:一级学科名称(三号宋体)研究方向:二级学科或三级学科名称(三号宋体)(自主设置二级学科和自主设置交叉学科须括号注明)学院(系、所):学生所在学院(三号宋体)指导教师:某某某教授(三号宋体)副指导教师:某某某教授(三号宋体,本栏无则空)论文答辩日期答辩委员会主席中南大学(小三号宋体)二〇一六年五月(小三号宋体)原创性声明本人声明,所呈交的学位论文是本人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除了论文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为获得中南大学或其他单位的学位或证书而使用过的材料。
基于视频的车流量统计算法设计摘要:智能交通系统(ITS)已经被科学家认为是解决当前城市交通问题最有效的方法,也是目前和未来交通发展的主流方向。
ITS的前提是获得交通道路的实时信息,比如车速、车流量等。
本文主要研究ITS中基于视频检测技术的车流量统计方法,对所涉及的运动目标检测、背景提取、阴影去除以及车辆统计等核心技术进行了详细的研究。
本文的工作主要分为以下四部分:1)对车流量统计相关算法进行了研究,针对目标检测算法,研究了光流法、帧间差分法和背景差分法。
针对背景提取算法,研究了均值法、统计中值法、单高斯背景模型法和混合高斯背景模型法;针对阴影消除算法,研究了基于HSV颜色空间变换的阴影消除算法、基于色彩特征不变量的阴影消除算法和基于纹理特征的阴影消除算法。
同时,本文对上述算法进行了实验对比分析。
2)给出了一种改进的混合高斯模型背景提取算法,当读入一定帧数的图像之后认为背景达到稳定状态,读入新的视频帧时,对当前帧进行判断,如果像素点和稳定背景图像的像素点差值大于阈值Th1,就对该像素点进行更新,反之就不更新。
3)给出了一种改进的基于虚拟区域的车流量统计算法,首先设置检测区域和检测线,然后跟踪检测区域中车辆的质心到检测线的距离d,如果d小于Th2认为有一辆车辆通过,通过实验验证,本文算法的精确率能达到90%左右。
4)实现了一个车流量统计系统,整个系统主要包括视频播放模块、GMM背景更新模块、前景构建模块和车辆计数模块。
视频播放模块主要完成视频的播放和显示;GMM背景更新模块主要是实现本文的背景提取算法;前景构建模块的主要功能是通过阴影去除和形态学操作得到较好的前景图像;车辆计数模块的主要功能是完成本文的车流量统计算法。
本文深入研究了车流量统计的相关算法,并给出了一种改进的混合高斯模型算法和一种改进的基于虚拟区域的车流量统计算法,最后用VC实现了一个车流量统计系统,实验结果表明本文设计的系统能够对车辆目标进行准确检测与统计。
视频处理算法范文一、视频去抖动算法视频去抖动是指消除视频中由于相机抖动或者拍摄器材不稳定导致的图像抖动。
常见的视频去抖动算法包括基于均值滤波、位移算法、卷积神经网络等。
其中,位移算法通过分析图像上的像素位移信息,计算抖动量,并根据计算结果对图像进行修复,能够有效地减少抖动现象。
二、背景建模算法背景建模是指对视频中的背景进行建模和分析,通过提取背景信息,可以实现目标检测、目标跟踪和背景减除等功能。
常见的背景建模算法包括基于高斯模型、自适应混合高斯模型、基于学习的方法等。
其中,自适应混合高斯模型是一种广泛使用的背景建模算法,它可以根据背景变化自动适应调整高斯分布的参数,从而更好地适应不同场景下的背景变化。
三、运动目标检测算法运动目标检测是指对视频中的移动目标进行检测和定位。
常见的运动目标检测算法包括帧差法、光流法、背景模型法和基于深度学习的方法。
帧差法通过比较相邻帧之间的像素差异,判断是否为运动目标,是一种简单高效的方法。
而光流法则通过分析相邻帧之间的像素位移,进一步计算运动目标的速度和方向。
基于深度学习的方法则通过卷积神经网络对视频图像进行特征提取,进而实现高精度的运动目标检测。
四、视频编码算法视频编码是指将视频信号经过压缩编码处理,以减少视频数据的存储空间和传输带宽。
常见的视频编码算法包括MPEG系列标准、H.264、H.265等。
其中,H.264是一种广泛使用的视频编码标准,它通过在空间和时间域上对图像进行预测和差分编码,并采用变换和量化等方法进行数据压缩,从而实现高效的视频编码。
背景帧差与分块帧差相融合的运动目标检测
杨辉;刘从军;武尚
【期刊名称】《计算机与数字工程》
【年(卷),期】2013(041)012
【摘要】提出一种融合使用背景帧差和分块帧差的运动目标检测方法.该方法通过对图像的每个像素点进行学习,然后建立初始背景,通过不完全覆盖分块法对图像进行分块,对各子块进行帧间差分实现对前景图像的粗提取,采用otsu算法获取阈值,运用背景差分对前景图像进行细提取.背景采用分段学习的更新方法,能够消除光照变化、背景物体摇动等噪声.实验结果表明,该方法快速、准确,抗干扰能力强,能较好地满足实时检测运动目标的要求.
【总页数】4页(P1915-1917,2023)
【作者】杨辉;刘从军;武尚
【作者单位】江苏科技大学计算机科学与工程学院镇江212003;江苏科技大学计算机科学与工程学院镇江212003;江苏科大汇峰科技有限公司镇江212003;江苏科技大学计算机科学与工程学院镇江212003
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于四帧帧差和混合高斯模型的运动目标检测 [J], 刘波;王平;杨小敏;邓艾
2.基于五帧帧差和混合高斯模型的运动目标检测 [J], 刘波;王平;杨小敏;邓艾
3.结合分块的改进三帧差和背景差的运动目标检测 [J], 王彬;马永杰;李鹏飞
4.分块帧差和背景差相融合的运动目标检测 [J], 高美凤;刘娣
5.基于背景差法和帧间差法的运动目标检测方法 [J], 李刚;邱尚斌;林凌;曾锐利因版权原因,仅展示原文概要,查看原文内容请购买。
运动目标检测方法概述作者:景阳黄柔周婧琳来源:《计算机光盘软件与应用》2012年第23期摘要:随着社会的发展,人们获取的信息途径越来越多,单纯的依靠人类的五官已不能及时的将我们获取的海量信息进行甄别和判断,因此计算机技术基础上发展的图像处理技术为我们生活、工作中的信息处理提供了很大的帮助,其在社会中的作用也越来越凸显。
其中,运动目标检测技术是整个图像处理技术的基础性环节,直接关系到后续信息处理的成败。
本文主要介绍了目标检测的常用算法的原理以及它们的优缺点,并对其中的帧间差分法和背景减除法进行了仿真实验,以验证其优缺点。
关键词:运动目标检测算法;帧间差分法;背景减除法中图分类号:TP391 文献标识码:A 文章编号:1007-9599 (2012) 23-0000-031 引言运动目标检测技术是图像处理技术中的关键基础技术[1],利用运动目标检测技术可以对视频图像中感兴趣的目标进行实时地检测、识别、提示报警,是进一步视频图像处理的重要依据。
运动目标检测技术已经广泛应用于智能视频监控、犯罪预防、智能分辨、自动制导等安防、军事领域[2]。
运动目标检测是将运动目标从视频序列图像背景中分离出来。
各类实际应用需求的不断增多,大大地推动了运动目标检测技术的发展,产生了许多成熟的目标检测算法。
一般我们会把运动目标检测区分为动态环境下和静态环境下,由于动态环境处理较为复杂,所以本文主要介绍静态环境下的目标检测算法。
2 运动目标检测常见方法静态环境下的运动目标检测是指将视频序列中的图像分割为背景图像和前景图像[1],提取其中存在变化的区域为前景图像,即运动目标或称感兴趣区域,而没有发生变化的区域为背景图像。
能否准确地检测出监控场景中的运动目标直接影响了后续目标跟踪和行为分析等效果的好坏,因为目标检测提取出来的像素是后续处理分析的主要对象,是分析与处理的基础。
虽然,在视频监控场景中,监控环境情况十分复杂,但每个运动图像都具有独特的可供计算机识别的特点,计算机利用这些特点就可以将前景图像检测出来。
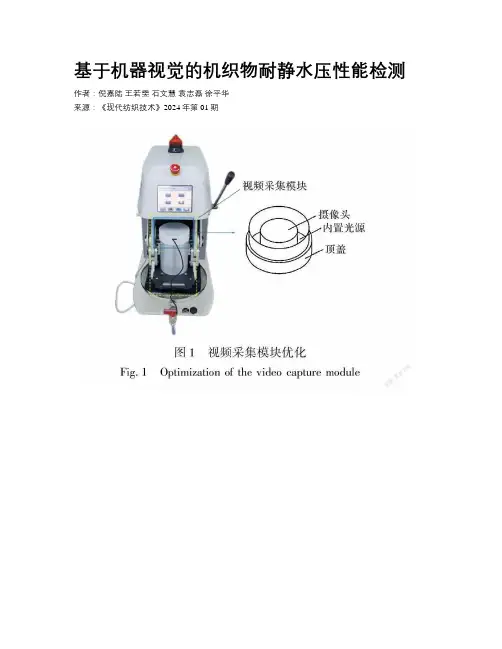
基于机器视觉的机织物耐静水压性能检测作者:倪嘉陆王若雯石文慧袁志磊徐平华来源:《现代纺织技术》2024年第01期摘要:为提升机织物静水压检测效率,实现静水压自动评级,在优化视频采集模块的基础上,利用改进的背景差分法,对不同表观机织物静水压性能进行测试和分析。
利用3D打印技术,实现采集设备和光源的封装;实时对视频帧进行掩膜、去噪和分割处理,以获得稳定有效的观测区域;利用优化更新背景策略的背景差分法,结合高斯混合模型,实现织物出水位置和帧位的实时记录,进而换算出织物耐静水压值。
结果表明:该方法总体优于常规背景差分法、高斯混合模型背景差分法;对纯色和宽条格织物检测表现良好,误差在037%~2.77%;但对于细密的规则条纹和不规则印花织物误差较大,误差率在9.27%以上。
该方法能够有效地检测纯色和部分规则花纹织物,对复杂表观织物的适用性有待提升。
关键词:机织物;静水压;抗渗水性;水珠;高斯混合模型中图分类号:TS107.4文献标志码:A文章编号:1009-265X(2024)01-0018-09舒适、健康、环保等消费理念加速材料的科技变革,促使传统的织物性能测评方法不断优化。
抗渗水性能是影响织物湿舒适性重要指标之一,在面料研发、生产中,常采用静水压法考核纺织品的抗渗水性能。
现行标准如ISO 811:2018《Textiles—Determination of resistance to water penetration—Hydrostatic pressure test》、GBT 4744—2013《纺织品防水性能的检测和评价静水压法》、AATCC 127—2017《Water Resistance: Hydrostatic Pressure Test》等适用于经过防水处理的各种织物、非织造布(如帆布、土工材料、帐篷布)抗渗水性能评估。
上述标准规定了测试水压、试样准备等要求,但在终止判定方面,仍需测试人员在观测到第3颗水珠时截停增压。
红外图像弱小目标检测技术研究1、本文概述随着技术的不断进步,红外成像技术已成为现代军事、航空航天、民用安全等领域不可或缺的重要工具。
特别是在夜间或弱光条件下,红外成像技术以其独特的成像方法实现了对目标的清晰观察和识别。
在实际应用中,红外图像往往含有大量的噪声和干扰,使得弱目标的检测异常困难。
研究红外图像弱小目标检测技术具有重要的现实意义和应用价值。
本文旨在探索红外图像弱小目标检测技术的相关理论和方法。
我们将分析红外图像的特征,以了解红外图像中弱小目标的特征和困难。
我们将回顾现有的弱目标检测算法,包括基于滤波的方法、基于背景抑制的方法和基于多帧融合的方法等,并分析其优缺点和适用场景。
接下来,我们将提出一种基于深度学习的弱目标检测算法,该算法通过从红外图像中提取和分类深度特征来实现对弱目标的精确检测。
我们将通过实验验证所提出算法的有效性,并将其与其他算法进行比较,为红外图像弱小目标检测技术的发展提供参考和启示。
2、红外图像弱小目标检测技术综述红外图像弱小目标检测技术是识别、提取和跟踪复杂背景下弱目标的重要技术。
由于红外图像中弱目标的信噪比低、对比度低、体积小、运动轨迹不确定等特点,其检测成为一项极具挑战性的任务。
近年来,随着红外成像技术和信号处理技术的快速发展,红外图像中的弱小目标检测技术也受到了广泛的关注和研究。
红外图像弱小目标检测技术的核心在于如何有效地从复杂背景中提取目标信息。
这通常涉及多个阶段,如图像预处理、对象增强、对象提取和对象跟踪。
在图像预处理阶段,主要目的是去除图像中的噪声,提高图像质量,为后续的目标检测提供良好的基础。
在目标增强阶段,使用直方图均衡和对比度增强等各种算法来提高目标与背景之间的对比度,从而突出目标信息。
在目标提取阶段,采用阈值分割、边缘检测、形态学处理等方法从增强图像中提取目标区域。
在目标跟踪阶段,通过滤波算法、匹配算法等实现对目标的连续跟踪。
目前,在红外图像中微弱小目标的检测方面取得了重大进展。
基于帧间差分的ViBe运动目标检测徐君妍;袁址赟;崔宗勇;曹宗杰【摘要】针对光线变化时现有前景检测方法易将背景检测为运动目标、形成大片阴影的问题,本文利用帧差法对光线变化的不敏感性,对基于ViBe的背景建模、前景检测算法进行改进.结合帧间差分的ViBe前景检测方法包括背景初始化、背景模型更新及后期图像处理三个模块.该方法在更新背景模型时,加入了帧间差分判别多阈值比较,并依据帧间差分的结果对背景更新率进行动态调整,最后对背景建模后的检测结果进行形态学处理,针对大的噪点进行轮廓提取及判定,最终检测出运动目标.针对不同条件下监控视频的试验结果表明,本文方法初始化速度快、实时性好,有效地抑制了由于光线干扰形成的大片鬼影区域.%To solve the problem that existing foreground detection method is easy to mistakenly identified the moving objects,and forms large shadow,an improved ViBe algorithm is proposed based on frame difference method,because frame difference method is insensitivity to illumination change.ViBe of foreground detection based on frame difference includes three modules:background initialization,background update model and picture processing.When update background model,add interframe difference thresholds discriminant,and adjust background update rate according to the result of frame difference.Finally,make morphological processing to get the moving targets,make contour extraction and determination for big noise points.The simulation results on surveillance videos under different conditions show that the proposed method initialize faster than before,itcan effectively eliminate ghost regions while exist light interference and the proposed method can detect in real time.【期刊名称】《科学技术与工程》【年(卷),期】2017(017)027【总页数】6页(P82-87)【关键词】背景建模;ViBe算法;运动目标检测;帧间差分【作者】徐君妍;袁址赟;崔宗勇;曹宗杰【作者单位】电子科技大学电子工程学院,成都611731;电子科技大学成都研究院,成都611731;中国电子科技集团公司第三十八研究所,合肥230000;电子科技大学电子工程学院,成都611731;电子科技大学成都研究院,成都611731【正文语种】中文【中图分类】TP391.41近年来,前景检测成为视频处理的一项关键技术,在视频内容分析、目标分类以及识别跟踪等方面有着重要应用。
视频图像中人体目标的检测方法研究复杂的背景环境和低质量的数字视频序列,因此,寻找更有效、鲁棒性更强的人体识别算法,应用到实际的视频监控场景中仍是当今计算机视觉领域的一个热点。1.2.2研究方法综述 视频监控系统中人体目标的检测识别方法可以分为两大类,即基于运动的人体识别方法和基于人体特征(主要是人体皮肤为特征的)检测方法。下面分别介绍这两类方法。1运动目标检测方法 运动检测的目的是从序列图像中将运动区域从背景图像中提取出来。因为该处理过程仅仅考虑图像中对应于运动区域的像素,所以,该方法仅适用于当人体目标与背景之间有相对运动时才能检测出13],下面是归纳出的目前几种常用的方法。(l)背景减除(B朗k脚undsubtraction) 背景减除14.51方法是目前运动分割中最常用的一种方法,它是利用当前图像与背景图像的差分来检测出运动区域的一种技术。它一般能够提供最完全的特征数据,而且速度快,能适合实时系统的要求。但对于动态场景的变化,如光照和外来无关事件的干扰等特别敏感。(2)时间差分(TemPoralDi月贻Tence) 时间差分方法利用图像序列中前后几个相邻帧之间的差分来提取出图像中的运动区域。例如LIPton等16]利用两帧差分方法从实际视频图像中检测出运动目标,进而用于目标的分类与跟踪;一个改进的方法是利用三帧差分代替两帧差分,如vsAM闭开发了一种自适应背景减除与三帧差分相结合的混合算法,它能够快速有效地从背景中检测出运动目标。时间差分运动检测方法对于动态环境具有较强的自适应性,但一般不能完全提取出所有相关的特征像素点,在运动实体内部容易产生空洞现象。(3)光流(OPticalFlow) 基于光流方法181的运动检测采用了运动目标随时间变化的光流场特性,来有效地提取和跟踪运动目标。该方法的优点是在摄像机运动存在的前提下也能检测出独立的运动目标。而缺点在于计算方法相当复杂,且抗噪性能差,如果没有特视频图像中人体目标的检测方法研究别的硬件装置则不能被应用于全帧视频流的实时处理。(4)单高斯模型判定法 文献10)提出了一种背景/前景分割方法,对最初的前1于20秒视频信号,在每个像素点上统计其灰度直方图,将出现频率最大的灰度值作为当前像素的背景,周期性(100-200帧)地重复该操作,来达到对背景的更新和维护;前景分割方法是将背景初始化中得到的灰度直方图看成一个高斯分布,计算其标准方差。.若当前像素值Kn满足{戈一刀门rl之2叮式时将其判为前景。该方法存在的缺点有:①在前景分割时,当前境与背景颜色相近时(couflage),此时不满足此判据,被误判为背景。②由于背景的更新是非实时的,则会产生视觉上的不连贯效果。而且当背景建模时,背景出现的概率必须大于5既,否则会产生错误的背景:例如,在背景初始化中的20秒内,若有一个人停留巧秒后离开,则此处的背景将会被误判为人体,而非真实的背景。③前景分割时使用的信息量太少,只用到了灰度信息,未使用帧间信息和邻域梯度信息。(5)混合高斯模型(GMM)判定法「10 对每一个像素点采用GMM来建模,引入场景活动等级(scenactlvitylevel)来调节GMM的学习常数,通过增加深度信息来加强背景分割的依据。但该方法存在的缺点有:①当前景背景颜色相近时,无法进行有效的分割。②学习常数更新速度及混合高斯模型个数的选择,都将影响前景运动目标的分割效果。(6)贝叶斯统计分割方法tl] 充分利用像素的光谱信息、空间信息及帧间信息,借助于Bayes判定准则进行前景背景的分割,取得了较好的分割效果,但该方法存在的缺点有:①提取出的前景目标体空洞较大,数学形态学的方法也无法连通修复。②当前景背景颜色相近时,也无法进行有效的分割。(7)时空联合分割法112] 将视频看作像素的时空块,同时考虑时间和空间维的信息。Greenspan等人13]将视频分为三维特征空间:颜色、空间和时间位置。每个象素与特征空间的一个点相对应,象素点通过高斯混合模型来聚类。在模型学习后,空间和时间维之间的高位协方差系数就能给出运动信息。采用时空法既利用了帧间时域上的强相关性,又利用了帧内空间上的特征,分割效果较好。该方法中前景时空块的定视频图像中人体目标的检测方法研究位精度较差,且该方法的运算效率不高。 一般说来,衡量一个算法的优劣主要考虑算法的分割质量、计算复杂度以及算法的通用性。上述方法各有利弊,但它们的共同缺点是只能对运动的(人体)目标进行检测,当前景(人体)目标长时间静止时,它们的运动特征消失而方法失效,因此产生了基于人体生物特征的分割方法,其中研究最多的是通过人体皮肤检测方法来检测视频图像中的人体目标。11基于皮肤特征检测方法 皮肤分割方法大致可分为两类:基于统计的方法和基于物理的方法。基于统计的方法又可分为带参方法和无参方法。无论是带参的还是无参的统计方法都是通过建立肤色统计模型进行肤色检测,主要包括两个步骤:颜色空间变换和肤色建模.基于物理的方法则在肤色检测中引入光照与皮肤间的相互作用通过研究肤色反射模型和光谱特性进行肤色检测。 (1)基于统计的皮肤分割方法 统计肤色检测的主要步骤是颜色空间变换和肤色建模。选择颜色空间本身就是选择肤色检测的最基本特征表示,肤色模型是关于肤色知识的计算机表示,通过训练样本集建立肤色模型是肤色检测的关键。一个实用的彩色图像肤色检测系统必须能够处理由于成像条件变化引起的肤色变化。一般地,处理环境变化有两种基本方法:容忍和适应。容忍的方法可以利用人眼的颜色恒常性,即在不同照明条件下,人们一般能正确反映物体固有的颜色。然而人们对颜色恒常性的机制还不清楚,颜色恒常性还没有适合于计算机视觉的好方案出现114,1习。 对于机器视觉而言,颜色恒常性是关于物理表面光谱反射率的描述[l61,不是人眼颜色恒常性对照明变化的容忍。因此,人们实际上更多的是研究如何使肤色模型自动适应环境变化。目前的动态肤色建模方法可以分成两类:第1类方法是可以将肤色模型参数调节到适应某幅静态图像;第2类方法是针对序列图像,能适应成像条件随时间的变化。这些自适应方法所建立的动态肤色模型的通用性可能较差,但是在特定条件下的性能更优,能获得高检测率和低误检率‘川. 含参统计方法以参数的形式表示皮肤颜色分布,例如高斯模型。但是,皮肤颜色分布通常是多重的模型,不能用颜色空间的一种高斯模型来充分表示。因此,提出了混合高斯模型,采用最大匹配(EM)算法适应和更新基于观察数据的模视频图像中人体目标的检测方法研究型,Gon梦周采用条件密度传播法调整不同时刻的高斯混合肤色模型,其优点是:①较低的空间复杂性,②需要相对较少的训练数据,难点是对于高斯混合模型的阶数选择,通常阶数是通过启发得到,在约束环境下,已知环境条件决定阶数。y沁飞9119]对Nccrgb颜色空间的高斯肤色模型通过将原模型参数与预测的参数进行线性组合,实现均值向量和协方差矩阵的自适应。Comanlcin碑01也利用均值漂移实时跟踪彩色非刚休目标。Lulzl]将连续自适应均值漂移camshift方法引入色调查表,可较好地适应不同测试图像的照明变化。Storring[22]的肤色轨迹方法是基于皮肤色度知识的。Chol23]和zhuIZ月】采用从粗到细的自适应肤色过滤算法. 在非参数肤色模型中,直方图交叉125,26]和直方图查找表【64]常用在肤色跟踪中。例如文献【27邓1通过在Hs直方图上做直方图反向投影快速跟踪彩色人脸区域,sorianol291的肤色模型更新利用肤色搜索区中落入肤色轨迹范围的像素进行直方图反向投影来完成肤色跟踪。stern阅发现在RG,rg,Hs,YQ,C汉,这些不同的ZD颜色平面间自动切换能改进人脸跟踪性能。通常,能否处理照明变化是动态肤色模型成功与否的关键,也是一个肤色检测系统从室内走向室外的前提。更普遍的是采用无参统计方法,在彩色空间中利用皮肤颜色直方图表示密度。其主要优点是:即使肤色分布复杂也能估计概率密度函数。缺点是:直方图方法需要大量的训练数据。通常,当直方图能正确量化和有足够的训练数据时,无参方法更好。 (2)基于物理的分割方法 在复杂照明条件下,比如图像中肤色在高光区或阴影区中,上述基于统计的肤色检测技术都会使相同的肤色区域分割成不同的区域,导致肤色区域分割失败。为了从成像机理上克服光照对图像的这种不利影响,需要考虑电磁辐射与皮肤相互物理作用的肤色检测技术,这就称为基于物理的肤色检测技术。基于物理与基于统计的肤色检测所使用的数学工具基本相似,主要差异在于有没有利用解释皮肤辐射特性的物理模型。 shafer叫根据非均匀电介质的反射特性,提出一个模拟不透明的非均匀电介质物体反射过程的数学模型,称为双色反射模型。Klinker〔监胡改进了双色反射模型,认为在RGB空间中界面反射以“1”形分布在一个四边形平面中。作为Shafer方法的一个变种,Sat。以1采用序列图像为界面分量建模。这些方法都只适合于视频图像中人体目标的检测方法研究点光源。stOring国将双色反射模型用到多光源的肤色建模。Buluswar国的归一化光度函数NPF是双色反射模型在NCCrgb颜色空间中的简化。Pavhdis训研究了可见光波段及红外波段的人脸和伪装检测技术,认为稳健的室内外人脸检测与识别系统需要可见光、反射红外和中波红外的多波段成像。可见光波段适合于人脸识别,反射红外波段适合于人脸检测,而反射红外和热红外波段适合于伪装检测。 Socohnky阁比较了可见光波段与8一12pm的热红外波段中的人脸识别,发现热红外在许多情况下有比较好的检测性能,而其它情况下也能达到可见光波段的人脸识别性能,其中的关键因素是热红外波段受到照明条件的影响很小。Kong侧认为可见光的人脸识别在可控照明条件下比较可靠,而热红外图像在照明不可控制的情况下或检测伪装人脸时比较有利。融合红外和可见光进行肤色和人体检测与识别己经成了一种新的系统设计趋向。例,Li侧综合考察红外可见光图像人脸识别的优缺点,设计了结合红外和可见光波段的人脸检测与识别系统。chenl’]也验证了结合红外波段和可见光波段比仅用其中之一能更好地识别人脸。Heol侧采用数据融合和决策融合两种方式结合热红外和可见光,在照明变化和表情变化的带眼镜人脸识别中也取得了较好的结果。 目前基于统计的肤色检测技术比基于物理的倍受关注,相对来说,基于统计的肤色检测技术强调结果而基于物理的强调过程。在加强特征提取和统计分类算法研究的基础上,引入基于物理的方法,拓展光谱波段或增加光谱分辨率,建立肤色成像模型和肤色波谱库,将使肤色真正成为一种强分类特征,大幅提高肤色检测性能和拓宽应用领域。1.3课题研究的主要内容及创新点1.3.1本课题的主要内容 本课题得到了国家基金委的支持【基金号为60641010],主要内容是研究如何从实际的数字视频图像序列中检测人体目标,以服务于对人进行监控的视频系统中。文中首先考虑到实际的视频信号受采集量化噪声、传输信道噪声以及现场电磁干扰等因素的影响,会产生诸如脉冲噪声、高斯噪声等降低视频序列信噪比的污染噪声,为了对后续的视频分割提供高质量的输入信号,并考虑实时性的要求,采用了基于脉冲祸合神经网络(PCNN)与改进的中值滤器相结合的滤波器对其进行去噪处理。
运动目标检测与跟踪算法的研究进展0 引言人类感知的环境信息大多是通过视觉获得的,而在接受到的所有视觉信息中,人们又往往对动态信息更感兴趣。
随着多媒体技术的发展,人们正在接触越来越多的视频信息。
一方面,要获得较高压缩比来存储这些信息,另一方面,需要对感兴趣的区域或对象进行操作[1]。
因此对视频图像中运动目标的提取、分类识别和跟踪,已成为对运动目标的行为进行理解和描述视频图像中动态信息的主要内容。
运动目标的检测与跟踪在技术上融合了计算机视觉、视频图像处理、模式识别和自动控制等相关领域的知识[2]。
运动目标的检测与跟踪是视频技术的一个重要研究方向,其应用十分广泛。
在交通流量的监测、安全监控、军事制导、视觉导航,以及视频编码中都有涉及。
目前,运动目标的检测与跟踪已经取得了很多成果,并且不断有新技术、新算法涌现。
但是,在实际环境中,由于自然环境的复杂(光照、气候的变化等),目标的高机动性,干扰了目标检测与跟踪,造成检测不准确且跟踪效率不高。
因此,研究改进运动目标检测与跟踪算法有很现实的意义和应用价值。
1 运动目标检测常用算法运动目标检测就是从视频图像中将变化的区域从背景中提取出来,此类算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测。
静态背景下只有被监视目标在摄像机的视场内运动;而动态背景下摄像机也发生了运动,这个过程就产生了目标与背景之间复杂的相对运动,造成动态背景下的运动检测和跟踪难度很大。
目前对于动态背景下运动检测和跟踪的研究较少,因此本文暂不涉及运动背景下的运动目标检测与跟踪。
在静态背景下,运动目标检测主要算法有三种:帧间差分法、背景差分法和光流法。
下面分别对这三种算法进行分析。
1.1 帧间差分法帧间差分法[3]的基本原理就是相邻帧的图像对应像素点的灰度值相减,通过差分图像进行二值化处理以确定运动目标。
帧间差分法的主要优点是:算法实现简单,程序设计复杂度低;不存在背景的获取、更新和存储的问题;对场景中光线的变化不太敏感,实时性好。
运动目标检测之Lucas-Kanade光流算法读书笔记视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。
随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热点研究问题之一。
而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展前景。
一目标检测运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出来。
目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差分法和光流法。
1背景差分法背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。
缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检测的结果2帧间差分法帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。
当监控场景中出现异常物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,判断它是否大于阈值来分析视频或图像序列的运动特性,确定图像序列中有无物体运动。
图像序列逐帧的差分,相当于对图像序列进行了时域下的高通滤波。
基于帧间差的分算法的运动目标检测研究论文案例范本摘要本文提出了一种基于帧间差的分算法的运动目标检测方法。
该方法通过计算相邻帧之间的差异来检测出视频中的运动目标,并采用自适应阈值法来进行目标的分割和去除噪声。
实验结果表明,该方法在运动目标检测方面具有较高的准确率和鲁棒性。
关键词:运动目标检测;帧间差;自适应阈值法;噪声去除AbstractIn this paper, a motion target detection method based on frame difference segmentation algorithm is proposed. This method detects moving targets in the video by calculating the differences between adjacent frames, and uses an adaptive threshold method to segment the targets and remove noise. The experimental results show that the proposed method has high accuracy and robustness in motion target detection.Keywords: motion target detection; frame difference; adaptive threshold method; noise removal1.引言运动目标检测是计算机视觉领域的一个重要研究方向,其应用广泛,包括视频监控、交通管理、自动驾驶等。
目前,运动目标检测方法主要分为两类:基于背景建模的方法和基于帧间差的方法。
前者适用于静态场景,后者适用于动态场景。
本文提出了一种基于帧间差的分算法的运动目标检测方法,该方法具有较高的准确率和鲁棒性。