孔组位置度检具设计分析及其自身位置度超差时的判定
- 格式:pdf
- 大小:248.93 KB
- 文档页数:2

三个孔位置度测试方法在制造业中,孔的位置度是一个重要的质量指标,尤其是在精密工程和机械加工领域。
三个孔的位置度测试是确保零部件质量的关键步骤。
本文将详细介绍三种常用的三个孔位置度测试方法。
### 三个孔位置度测试方法#### 1.三点法**适用范围:** 适用于三个孔的分布呈三角形或直线形的情况。
**测试步骤:**- 使用一个标准规或量棒,确保其尺寸精度符合要求。
- 将规或量棒的一个端点定位在一个孔的中心。
- 旋转规或量棒,使其另一端点分别对准另外两个孔的中心。
- 测量规或量棒第三个端点到第三个孔的距离,与规定的位置度公差比较。
**优点:** 操作简单,效率较高。
#### 2.对角线法**适用范围:** 主要用于三个孔呈等腰三角形分布的测试。
**测试步骤:**- 使用一把精确的卡尺或电子测距仪。
- 分别测量两个非共线孔之间的距离。
- 计算两条对角线的长度,并确保它们在规定的位置度公差内相等。
**优点:** 测试精度高,特别适用于对称布局的三个孔。
#### 3.量块和微米计法**适用范围:** 适用于对孔位置度要求非常高的精密测量。
**测试步骤:**- 准备一套精度等级合适的量块。
- 将量块放置在三个孔之间,确保量块平面与孔的轴线平行。
- 使用微米计或测高仪测量量块上表面到孔轴线的距离。
- 对三个孔重复上述步骤,并记录数据。
- 通过比较实际测量值与理论值之间的差异,判断孔的位置度是否合格。
**优点:** 测量精度高,可靠性强。
### 结语选择合适的孔位置度测试方法,不仅能够确保零部件的质量,还能提高生产效率。
在实际应用中,操作人员需结合具体情况和测量精度要求,选择最适宜的测试方法。
孔径超差技术要求孔径超差技术要求一、引言孔径超差技术是一种用于测量和控制光学系统中孔径大小的方法。
在光学系统中,孔径大小对于成像质量和分辨率有着重要的影响。
为了保证光学系统的性能,需要对孔径进行精确的测量和控制。
本文将详细介绍孔径超差技术的要求以及相关的技术知识。
二、孔径超差技术要求1. 精度要求孔径超差技术需要具备高精度的测量能力。
通常情况下,光学系统的孔径大小在亚微米级别或更小。
对于孔径超差技术而言,其精度要求应达到亚微米级别或更高。
2. 稳定性要求孔径超差技术需要具备良好的稳定性。
由于光学系统中存在各种环境因素和噪声干扰,如温度变化、机械振动等,这些因素可能会导致测量结果的偏差。
在进行孔径超差测量时,需要采取一系列措施来提高系统的稳定性,以确保测量结果的准确性和可靠性。
3. 快速性要求孔径超差技术需要具备较快的测量速度。
在实际应用中,通常需要对大量的光学元件进行孔径测量。
如果测量速度过慢,将会导致工作效率低下。
孔径超差技术要求能够在短时间内完成孔径测量,以提高工作效率。
4. 自动化要求孔径超差技术需要具备一定程度的自动化能力。
由于孔径测量通常需要对光学系统进行多次重复操作,如果全部依靠人工操作将会非常耗时且容易出错。
通过引入自动化控制系统,可以实现对光学系统的自动化操作和控制,并提高工作效率和准确性。
5. 可追溯性要求孔径超差技术需要具备良好的可追溯性。
在进行孔径测量时,需要确保测量结果的准确性和可靠性,并能够追溯到国家或国际标准。
在进行孔径超差测量时,需要使用经过校准和验证的仪器设备,并严格按照国家或国际标准进行操作和记录。
三、孔径超差技术的实现方式1. 光学测量法光学测量法是一种常用的孔径超差技术。
该方法利用光学原理,通过测量光线经过孔径时的衍射或干涉现象,来间接地确定孔径大小。
典型的光学测量方法包括衍射法、干涉法等。
2. 机械测量法机械测量法是一种通过机械手段直接测量孔径大小的方法。
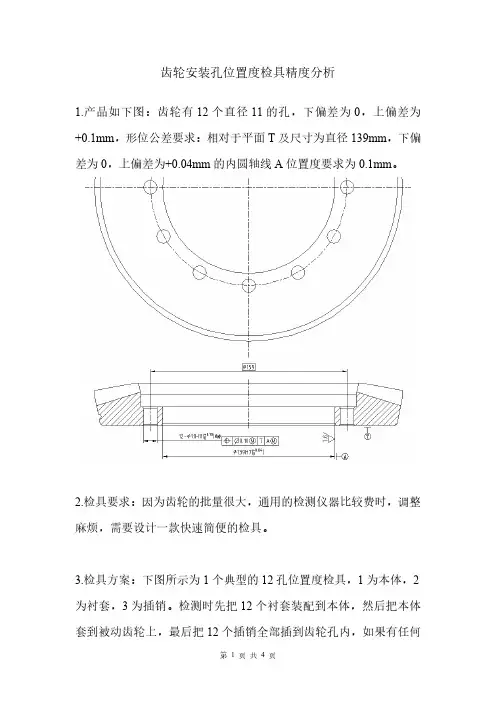
齿轮安装孔位置度检具精度分析1.产品如下图:齿轮有12个直径11的孔,下偏差为0,上偏差为+0.1mm,形位公差要求:相对于平面T及尺寸为直径139mm,下偏差为0,上偏差为+0.04mm的内圆轴线A位置度要求为0.1mm。
2.检具要求:因为齿轮的批量很大,通用的检测仪器比较费时,调整麻烦,需要设计一款快速简便的检具。
3.检具方案:下图所示为1个典型的12孔位置度检具,1为本体,2为衬套,3为插销。
检测时先把12个衬套装配到本体,然后把本体套到被动齿轮上,最后把12个插销全部插到齿轮孔内,如果有任何一个插销插不入就判断此齿轮不合格。
此检具原理简单,结构可靠,关键点在于各个零件精度的确定。
3.公差选择a本体与衬套装配后不拆卸,基本无间隙,采用H7/n6配合公差,认为衬套内孔的位置精度完全取决于本体孔的位置精度。
b因插销需要拆卸,因而插销与衬套配合公差为H7/g6c本体与此类内孔配合,本体也是要经常拆卸的,因而公差选择h7。
d最后确定插销直径d,齿轮产品的12个孔在不同的尺寸公差下其最大实体直径是不同的,在孔尺寸为下偏差时加上位置误差,此时最大实体直径最小,设为D1。
再考虑插销和衬套最大配合间隙,设为j1,插销和衬套本身两个圆柱同心度误差,设为j2,本体12个孔制造误差,设为j3,最后得插销d=D1-j1-j2-j3。
本体与齿轮之间的配合也是有间隙的,这个间隙不影响d,因而不用考虑。
4.改进措施:由以上的分析可知,影响插销的主要是零件本身加工误差及配合精度。
通过改进零件结构,减少零件数量及配合次数可以提高检测的准确性,如下图:插销与本体直接配合,装配好之后不拆卸,因而可以做成消除间隙的配合,影响d的因素就只有本体本身孔的位置误差。
插销固定后减小了操作量,提高检测效率,避免了频繁拆装插销导致与衬套间隙加大的问题。
孔位置度计算公式详解孔位置度是指在一定的公差范围内,孔与相关参考面之间的距离,它是衡量孔位质量的指标之一。
孔位置度计算方式是通过测量孔的实际位置与设计位置之间的偏差来进行的。
孔位置度计算公式在国际标准ISO 1101中有详细规定。
以下是详细解析:1. 孔中心位置与设定位置之间的偏差(DTP):DTP = S - T其中,S表示测量的孔中心位置,T表示设计的孔中心位置。
2. 孔中心位置偏差绝对值:∑DTP = |DTP1| + |DTP2| + … + |DTPn|其中,|DTP1|表示第一组测量中心位置偏差的绝对值,|DTP2|表示第二组测量中心位置偏差的绝对值,以此类推。
3. 孔位置度:孔位置度(P)= 2 × √ ∑DTP^2孔位置度是孔中心位置偏差的平方和的二次根号的2倍。
这个公式可以使得孔与相关参考面之间的距离变成一个综合的评定值,用来衡量孔位质量。
以上公式是比较直接的计算方法,但在实际应用中存在许多误差和不确定因素,因此衍生了如下的计算公式来更精确地衡量孔位置度:孔大小与公差ΣDTM = |DTM1| + |DTM2| + … + |D TMn|其中,|DTM1|表示第一组测量孔大小偏差的绝对值,|DTM2|表示第二组测量孔大小偏差的绝对值,以此类推。
n组孔中心位置与孔径之间的偏差:|DTG1|,|DTG2|,...,|DTGn|其中,|DTG1|表示第一组测量孔中心位置与孔径之间的偏差的绝对值,|DTG2|表示第二组测量孔中心位置与孔径之间的偏差的绝对值,以此类推。
孔位置度的计算公式如下:孔位置度(P)= { [ ∑DTP^2 + (k1 × ΣDTM)^2 ]^0.5 + (k2 ×ΣDTG)^2 }^0.5其中,k1和k2是可根据实际情况取得的系数。
综上所述,孔位置度计算公式通过测量孔的实际位置和孔径与设计位置和孔径之间的偏差,得出孔位置度的评定值,来衡量孔位质量的好坏。
孔位置度的解释
孔位置度指的是零件的孔的位置偏差的度量值。
在机械设计中,孔是一种常见的连接
和定位方法。
在制造和装配过程中,孔的位置偏差会影响零件的匹配和正确安装。
因此,
孔位置度是机械零件设计和制造过程中一个重要的质量控制指标。
孔位置度包括两个方面,一个是孔的偏差值,一个是孔偏差的位置。
孔的偏差值通常
使用直径、径向和轴向偏差等指标来表示。
其中直径偏差指的是孔的直径与理论值的差别。
径向偏差指的是孔中心与理论中心的距离差别。
轴向偏差指的是孔的顶部或底部对应面到
理论平面的距离差别。
孔位置度的位置偏差指标包括相对位置误差和绝对位置误差。
相对位置误差指的是孔
中心和理论中心之间的距离偏差。
绝对位置误差指的是孔中心与参考平面或其他主要特征
总体系的位置偏差。
孔位置度的测量方法有许多种。
在机床上,可以使用游标卡尺、游标测头、比测仪等
精密测量工具来实时监测孔位置度。
在难以到达的区域,可以使用激光扫描技术或三维测
量设备来测量孔位置度。
在制造过程中,为了控制孔位置度,常常采用以下方法:
1. 优化机床和工具的设计,保证加工过程中的精度和稳定性。
2. 严格控制材料的加工和热处理,以减少材料变形和损失。
3. 使用高精度加工和检测设备,以确保孔的质量和位置精度。
4. 实施全面、系统、严格的质量管理,从供应商到成品制造,确保孔位置度符合设
计要求。
位置度检具位置度检具是用于检测工件在三维空间内的位置度误差的量具。
通过与工件配合,在加工过程中可以保证工件的质量和准确度。
位置度检具的类型繁多,其使用之广泛也反映出其重要性和必要性。
本文将介绍常用的位置度检具。
分类按功能来分,位置度检具主要可以分为三类:平面平行度检具、圆柱度检具和球面度检具。
平面平行度检具平面平行度检具是一种用于检查工件表面平行度误差的量具。
它通常由一组平面旋转基座和检测头组成,检测头可以通过刻度盘或简单的刻度来确定工件的平面误差。
通常,这种量具可以通过调整或更换刻度盘来适应不同的检测需求。
圆柱度检具圆柱度检具主要用于检测圆柱工件的轴线竖直度。
其通常由几组可旋转基座和检测头组成。
检测头产生一个微小弧形,使用者可以通过刻度甚至观察其弧形形状来确定工件的圆柱度误差。
球面度检具球面度检具可用于检测工件表面的球度误差。
球面度检具通常由一组旋转座和检测头组成,检测头以一定的速率转动,用于检测工件表面的球度误差。
为了检测不同的工件,球面度检具通常采用可调节的检测头,可以适应各种工件的检测。
选用原则在选择位置度检具前,必须考虑以下几个因素:工件特性我们需要了解工件形状、尺寸等信息,以便选用适当的位置度检具。
比如,对于圆柱形的工件,就需要使用圆柱度检具,而不是平面平行度检具。
检测范围不同的位置度检具适应不同的检测范围。
根据工件的尺寸和形状,我们需要选择可检测的范围,并保证检具能够覆盖所有的区域。
检测精度在实际应用中,位置度误差的检测精度是非常重要的。
因此,我们需要选用具有高精度的位置度检具。
检具品质品质是保证检具精度和可靠性的基础。
选购位置度检具时,应当考虑生产厂家、检具的材料、制造工艺等因素,以确保检具的品质。
使用方法在使用位置度检具时,应严格按照检具操作说明进行操作,并给予必要的维护和保养。
以下是使用位置度检具的常用步骤:1.选择正确的位置度检具,根据工件形状和尺寸进行选择。
2.将待检测的工件安装到检具上,并根据需要进行调整。
位置度∮t:(每个)被测轴线必须位于直径为公差值∮t,由以对于基准的理论正确尺寸所确定的理想位置为轴线的圆柱面内。
例法兰螺钉孔位置度:(1)用V型铁支承距离最远两端主轴颈(A-B),将螺纹检轴紧密旋入螺纹孔中,曲轴销孔中心旋转至X(水平)方向,用带有杠杆百分表的高度游标卡尺,将基准中心调整至等高(同时,将位置度检具某一平面调整水平后,固定)。
分别测量各螺纹检轴中心线与基准中心线在X(水平)方向的误差值即:Fx。
曲轴销孔中心旋转至Y(垂直)方向(同时位置度检具原垂直面为水平),此时测量各螺纹检轴中心线与基准中心线在Y方向的误差值即:Fy。
位置度误差为:ΔF=2(Fx2+ fy2)1/2。
(2)用V型铁支承距离最远两端主轴颈(A-B),将螺纹检轴紧密旋入螺纹孔中,曲轴连杆轴颈基准(C)旋转至X(水平)方向,用带有杠杆百分表的高度游标卡尺,将基准中心调整至等高(同时,将位置度检具某一平面调整水平后,固定)。
分别测量各螺纹检轴中心线与基准中心线在X(水平)方向的误差值即:Fx;曲轴连杆轴颈基准(C)旋转至Y (垂直)方向(使位置度检具原垂直面为水平),此时测量各螺纹检轴中心线与基准中心线在Y(垂直)方向的误差值即:Fy。
螺纹孔位置度误差为:ΔF =2(Fx2+ Fy2)1/2。
取各螺纹检轴位置度误差最大值,作为评定的依据。
例定位销孔位置度1、大柴:(1)销孔对基准平面的位置度(水平方向): 用V型铁支承距离最远的两个主轴颈(A-B)且调至等高,把检轴紧密插入销孔,慢慢调整曲轴,用带有杠杆百分表的高度游标卡尺将基准轴线调至等高后(同时,将位置度检具水平方向平面调整等高后,固定)。
测量销孔中心与基准轴线高度差的二倍,即为销孔位置度误差。
(2) 销孔轴线对主轴颈轴线的位置度(垂直方向):用V型铁支承距离最远的两个主轴颈(A-B)且调至等高,把检轴紧密插入销孔,慢慢调整曲轴,连杆轴颈基准(C)调整至Y (垂直)方向(即位置度检具原垂直面为水平),并用带有杠杆百分表的高度游标卡尺,测量销孔中心线到基准轴线的数值与理论正确尺寸之差的二倍。
位置度公差的理解过程~以下为正文~位置度公差是最常见的形位公差之一,如何准确理解位置度公差对我们充分理解图纸要求及设计意图非常重要。
以下是本人对于位置度公差的理解过程(或思维过程)的总结,希望对大家有帮助。
这里我将对位置度理解过程分为如下七步:第一步:确定公差带的大小和形状第二步:理解修正符号,确定补偿公差第三步:按基准建立参照基准体系第四步:确定公差带在参照基准系统内的方向和位置第五步:识别被测形体的被测要素第六步:考虑同步要求的影响第七步:确定测量方法和评估依据我们就下面这个例子中两组孔的位置度来逐步说明整个理解过程。
第一步:确定公差带的大小和形状。
公差带大小及形状是由公差框格中的公差值来确定的,公差值的大小就是公差带的大小。
就位置度而言,公差带只有三种形状:两平行平面,一个圆柱或一个球,具体形状则由公差值前有无直径符号φ或球面直径符号Sφ来确定,如果公差值前有直径符号,它的公差带就是一个直径等于公差值的圆柱;如果公差值前有球面直径符号Sφ,它的公差带就是一个直径等于公差值的球;如果公差值前没有任何符号,它的公差带就是相距公差值的两平行平面。
从上面的例子中可以看出,6个φ8的孔的位置度公差带是直径为0.1的圆柱,而4个φ12的孔的位置度公差带是直径为0.2的圆柱。
第二步:理解修正符号,确定补偿公差。
修正符号都是紧随着位置度公差值出现。
位置度公差可以由MMC,LMC或RFS等修正符号来确定位置度公差与尺寸公差的关系。
如果公差值后没有任何符号,则默认为RFS状态,也即公差带的大小与被测孔的实际尺寸无关,此时要求无论被测形体的实际尺寸是多少,位置度公差值都是形位公差框格内规定的公差值,因此位置公差与尺寸公差共同构成的边界随着实际尺寸的变化而变化,无法形成一个固定的边界。
如果公差值后面带MMC符号(即圈M符号),则表示形位公差框格内的公差值只适用于被测形体在MMC时,当被测形体的实际尺寸从MMC向LMC偏离时,该偏离量将被允许补偿到位置度公差带上,此时位置度公差值随着被测形体的实际尺寸的变化而变化,在这两个公差的一起作用下构成了一个固定的边界,这个边界也就是我们通常说的实效边界VC。

位置误差的测量实验报告一、实验目的1. 熟悉零件有关位置误差的含义和基准的体现方法。
2. 掌握有关通用量仪的使用方法。
二、实验用量具齿轮跳动检查仪、平板、千分表、百分表、千分表架、V型块、直角尺、钢板尺等三、实验内容及说明1、平行度误差的测。
连杆小孔轴线对大孔轴线的平行度1)连杆孔的平行度要求如图1-15所示2)测量方法如图1-16所示平行度误差为将零件转位使之处于图中0度位置,使两心轴中心与平板等高,然后在测出0度位置的平行度误差。
根据测量结果判断零件平行度误差是否合格2. 垂直度误差的测量十字头孔轴线对孔轴线以及对侧面B的垂直度要求,如图1-17所示。
1)轴线对轴线的垂直度误差的测量如图1-18所示。
将测量表架安装在基准孔心轴上部,在距离为L2两端用千分表测得读数分别为M1,M2,则该零件轴线对轴线的垂直度误差为:2) 轴线对侧面B的垂直度误差测量如图1-19所示。
被测孔轴线用心轴模拟,先将心轴穿入零件被测孔,以零件顶面为支撑面,放在三个千斤顶上。
再用一直角尺,使其一面放在平板上,另一面与基准面B靠拢,同时调节千斤顶使其与基准面贴合为止,这说明基准面B与平板垂直。
然后用千分表分别测出图中L2长度两端读数M1,M2,则垂直度误差为根据以上结果,判断两项垂直度要求是否合格3. 圆跳动误差的测量被测零件圆跳动公差要求如图1-23所示,其测量方法如图1-24所示1)径向圆跳动误差的测量:将工件旋转一周,记下千分表读数的最大差值。
共测三个截面,取其中最大跳动量作为该表面的径向圆跳动误差值,并判断该指标是否合格2)端面圆跳动误差的测量:分别在端面靠近最大直径处和较小直径处测量,每测一处,转动工件一转,读取指示表的最大最小读数差,取其较大者作为该端面的圆跳动误差值图1-15图1-16图1-17图1-18中国石油大学(华东)四、数据分析1. 单位(mm)实验内容L1L21L22L2M1M2F允许值是否合格孔轴线平行度0度位置36.262.059.0157.2 1.191 1.1950.000920.25合格孔轴线平行度90度位置36.279.578.5194.2 1.981 2.4650.09020.1合格孔轴线与端面垂直度93.860.060.0213.80.7100.5260.08070.06不合格孔轴线与孔轴线垂直度93.878.077.8249.60.8390.8890.01880.06合格图1-19图1-23图1-242. 单位(µm )3. 单位(µm )五、思考题1. 求垂直度、平行度误差时为什么要有L1/L2,L1、L2分别指什么?L2指被测心轴长度;L1指被测工件孔的长度。
形位公差及位置度检具设计被测孔基本尺寸 D20上偏差 ES 0.052轴基本尺寸 d 20上偏差 es 下偏差 EI 0下偏差 ei 孔局部实际尺寸 Da20.04轴局部实际尺寸 Da 19.97孔轴线的形位误差0轴轴线的形位误差0孔轴线的形位误差0.025轴轴线的形位误差0.05孔公差 Th0.052轴公差 Ts 0.033孔最大极限尺寸 D max20.052轴最大极限尺寸 d max 19.98孔最小极限尺寸 D min20轴最小极限尺寸 d min 19.947孔最大实体尺寸 D M20轴最大实体尺寸d M 19.98孔最小实体尺寸 D L20.052轴最小实体尺寸d L 19.947孔轴线的形位误差0.04轴轴线的形位误差0.01孔的作用尺寸 D 作用20轴的作用尺寸 d 作用19.98基准孔基本尺寸 D40上偏差 ES 0下偏差 EI -0.062孔轴线的形位误差0孔公差 Th0.062孔最大极限尺寸 D max40孔最小极限尺寸 D min39.938孔最大实体尺寸 D MMC39.938孔最小实体尺寸 D Lmc40孔的实效尺寸 D VC 39.938定位部位同时检验0同时检验输入1分别检验输入0测量部位同时检验0同时检验输入1分别检验输入0导向部位有台阶0有台阶输入1无台阶输入00.052包容原则图纸要求(包容)图纸要求(包图纸要求(最大实体)图纸要求(最大零件内表面尺寸公差 Th 测得实际尺寸时,所允许的形位误差应用最包容原则时,使用极限边界原则判定被测要素合格与否位置量规工作部位尺寸的计算(包容原则)综合公差 Tt 0.052200.0040.0040.0030.003000.008无台阶0.00250.012同时检验0.0120.0082020.012上偏差 ES 0下偏差 EI -0.00420.00439.93839.938上偏差 ES 0下偏差 EI -0.00339.93220.012520.012上偏差 ES 0下偏差 EI 020.01220.0125测头部位为外表面20.012上偏差 ES 0下偏差 EI 020.012零件被测要素的形位公差 t 零件内表面的实效尺寸 DVC测量部位的尺寸公差 T M 测量部位的允许最小磨损量 W M 定位部位的尺寸公差 T p 定位部位的允许最小磨损量 W P 零件内表面的最大实体尺寸 D MMC 零件基准要素的形位公差 t 工作部位的位置公差 t P 工作部位的位置公差 t P 测量部位的基本偏差 F M 测量部位的基本偏差 F M 导向部位的尺寸公差 T G 导向部位的允许最小磨损量 W G 导向部位的最小间隙 Cmin 测量部位的磨损极限尺寸 D WM 定位部位的基本尺寸 D BP 定位部位的极限尺寸 D LP 定位部位的基本偏差 F P 测量部位的基本尺寸 D BM 测量部位的极限尺寸 D LM 导向部位的磨损极限尺寸 D WG 测头导向部位的基本尺寸 D BG定位部位的磨损极限尺寸 D WP 导向部位的基本尺寸 D BG 导向部位的极限尺寸 D LG 测头导向部位的极限尺寸 D LG 测头导向部位的磨损极限尺寸 D WG-0.02被测孔基本尺寸 D20上偏差 ES 0.052轴基本尺寸 d 20-0.053下偏差 EI 0孔局部实际尺寸 Da20.04轴局部实际尺寸 Da 19.97孔轴线的形位误差0.025轴轴线的形位误差0.05孔公差 Th0.052轴公差 Ts 0.033孔最大极限尺寸 D max20.052轴最大极限尺寸 d max 19.98孔最小极限尺寸 D min20轴最小极限尺寸 d min 19.947孔最大实体尺寸 D MMC20轴最大实体尺寸D MMC 19.98孔最小实体尺寸 D Lmc20.052轴最小实体尺寸d LMC 19.947孔轴线的形位误差0.065轴轴线的形位误差0.06孔的作用尺寸 D 作用19.975轴的作用尺寸 d 作用20.03孔的实效尺寸 D VC 19.975轴的实效尺寸 dvc 20.03基准孔基本尺寸 D40上偏差 ES 0下偏差 EI -0.062孔轴线的形位误差0孔公差 Th0.062孔最大极限尺寸 D max40孔最小极限尺寸 D min39.938孔最大实体尺寸 D MMC39.938孔最小实体尺寸 D Lmc40孔的实效尺寸 D VC 39.938定位部位同时检验0同时检验输入1分别检验输入0测量部位同时检验0同时检验输入1分别检验输入0导向部位有台阶0有台阶输入1无台阶输入00.052最大实体原则求(包容)(最大实体)零件内表面尺寸公差 Th 测得实际尺寸时,所允许的综合形位公差应用最大实体原则时,使用实效边界原则判定被测要素合格与否原则)位置量规工作部位尺寸的计算(最大实0.025综合公差 Tt0.07719.9752000.0040.00300有台阶0.008无台阶分别检验0.012同时检验0.00819.97519.987上偏差ES 0下偏差EI -0.00419.97939.93839.938上偏差ES 0下偏差EI -0.00339.93219.9875导向部位为内表面19.987上偏差ES 0下偏差EI 019.98719.9875测头部位为外表面19.987上偏差 ES 0下偏差 EI 019.987位置量规工作部位的尺寸公差(μm)零件被测要素的形位公差 t零件内表面的实效尺寸 DVC 测量部位的尺寸公差 T M测量部位的允许最小磨损量 W M 定位部位的尺寸公差 T p定位部位的允许最小磨损量W P 零件内表面的最大实体尺寸D MMC 零件基准要素的形位公差 t工作部位的位置公差 t P 工作部位的位置公差 t P 测量部位的基本偏差 F M测量部位的基本偏差 F M 导向部位的尺寸公差 T G导向部位的允许最小磨损量 W G 导向部位的最小间隙 Cmin测量部位的磨损极限尺寸 D WM 定位部位的基本尺寸 D BP定位部位的极限尺寸 D LP定位部位的基本偏差 F P测量部位的基本尺寸 D BM测量部位的极限尺寸 D LM导向部位的磨损极限尺寸 D WG 测头导向部位的基本尺寸 D BG 定位部位的磨损极限尺寸 D WP 导向部位的基本尺寸 D BG 导向部位的极限尺寸 D LG综合公差Tt 测头导向部位的极限尺寸 D LG 测头导向部位的磨损极限尺寸 D WG 测量部位定位部位尺寸公差T M 允许最小磨损量W M 尺寸公差 T P 允许最小磨损量W P25-4040-6363-100100-160160-250250-400400-630630-10001000-16001600-2500Tt 2.53尺寸公差T M 允许最小磨损量W M 尺寸公差 T P允许最小磨损量W P 45681为量规台阶式测量件(或定位件)的测量部位(或定位部位10121620上偏差 es-0.02下偏差 ei-0.053最大实体)0.0040.0030.0025有台阶0.012分别检验最小间隙Cmin 位置公差导向部位工作部位尺寸公差T G 允许最小磨损量W Gtp tp115628 2.51031241652062583210最小间隙Cmin 尺寸公差T G 允许最小磨损量W G 2.533445位部位)对导向部位的位置公差(同轴度、对称度)65 810612。
孔组位置度检具设计分析及其自身
位置度超差时的判定
伊顿液压系统(济宁)有限公司 刘军
功能量规是当最大实体要求应用于被测要素和(或)基准要素时,用来确定它们的实际轮廓是否超出边界(最大实体实效边界或最大实体边界)的全形量规。孔组位置度检具就是常见的一种功能量规,相比三坐标检测,它的检测效率比较高,使用比较方便,然而它的准确性却常常引起人们的质疑,另外其自身位置度超差时,我们该如何对其进行判定。下面我们对孔组位置度检具的的设计进行分析,以研究其位置度和尺寸公差对零件的影响。文中所有尺寸单位均为mm。 图1 零件图 一、根据我国标准《GB/T 8069-1998 功能量规》,对图1中的零件设计一套整体型位置度检具,过程如下: dIB=DMV=12-0.2=11.8;Tt=0.2+0.2=0.4 查表得:TI=WI=0.008;tI=0.012;FI=0.02 dI=(dIB+FI)0-TI=(11.8+0.02)0-0.008 =11.820-0.008 dIW=(dIB+FI)-(TI+WI)=(11.8+0.02)-
(0.008+0.008)=11.804
检具设计图如下图2:
图2 检具图A
对于零件:
最大实体实效尺寸DMMVS=12-0.2=11.8
最小实体实效尺寸DLMVS=12.2+0.4=12.6
对于检具:
最大实体实效尺寸
dMMVS=11.82+0.012=11.832
最小实体实效尺寸dLMVS=11.82-0.008-
0.012=11.8
检测销到达磨损极限时:
最大实体实效尺寸
dMMVS=11.804+0.012=11.816
最小实体实效尺寸= dLMVS=11.804-
0.012=11.792
2×Φ12
42
⃝
Φ0.2 M
+0.2
0看
42
⃝
Φ0.012
2×Φ11.82
E看
0看
-0.008
(磨损极限:11.804)
二、上例中检测销位置度要求为Φ0.012,
这对于检具的制造要求难度比较大,考虑
到检具制造的经济性,目前很多检具的设
计制造商会放宽检具的位置度要求,如要
求检测销位置度为零件位置度的1/8,这
样上例中的检测销位置度即为Φ0.025,
其设计图如下图3:
图3 检具图B
最大实体实效尺寸
dMMVS=11.82+0.025=11.845
最小实体实效尺寸dLMVS=11.82-0.008-
0.025=11.787
三、在检具使用一段时间后,由于不规范
操作或受环境影响,其位置度会有超差的
情况,假如位置度超差达到了Φ0.05,如
果其尺寸仍在公差范围内,其:
最大实体实效尺寸
dMMVS=11.82+0.05=11.87
最小实体实效尺寸dLMVS=11.82-0.008-
0.05=11.762
四、这种超出国家标准设计或超差的检具
对零件的判定有多大影响呢?下面我们做
了一个对比图,见图4。
通过对比不难发现:按照国家设计的检具
会误废合格零件,但不会误收不合格零件;
图4 公差对比图
当检测销到达磨损极限时,即会误废合格
零件也会误收不合格零件;当检具设计放
宽或检具位置度超差时,检具会增加误废
和误收的范围,如果零件实际值呈标准正
态分布,误判的概率会非常小,见下图5。
总之,在检具的设计制造和使用时,应综
合工厂的质量要求和经济效益进行判定。
图5 零件正态分布简图
42
⃝
Φ0.025
2×Φ11.82
E看
0看
-0.008
合
格
零
件
不
合
格
零
件
11.8
看