adams2012简单实例赏析_入门级别、感受adams
- 格式:doc
- 大小:997.04 KB
- 文档页数:13

ADAMS教程很详细手把手教你学会
ADAMS是一款领先的多体动力学仿真软件,广泛应用于机械、航空航天、汽车等领域。
它可以帮助工程师进行产品设计、性能分析、优化等工作。
本文将介绍ADAMS的使用方法,通过详细的手把手教程,让你轻松掌握ADAMS的技术。
接下来,我们需要在模型中添加不同的零部件,比如连接件、传动件等。
通过简单的拖拽操作,将零部件拖放到模型中,并连接它们。
通过设定零部件的属性和参数,可以定制不同的模型。
在模型构建完成后,我们可以进行仿真分析。
点击仿真按钮,ADAMS 将自动计算模型的运动学和动力学特性,得到系统的运动轨迹、力学特性等。
通过对仿真结果的分析,我们可以了解系统的行为和性能。
除了基本的模型构建和仿真分析,ADAMS还提供了优化功能。
通过设定不同的优化目标和约束条件,ADAMS可以自动优化系统设计,使其达到最佳性能。
另外,ADAMS还支持多种输出格式,比如图表、动画等。
我们可以将仿真结果输出为图表,方便进行数据分析;也可以生成动画演示,直观显示系统的运动过程。
总的来说,ADAMS是一款功能强大的多体动力学仿真软件,能帮助工程师进行产品设计和性能分析。
通过本文的手把手教程,相信你已经掌握了ADAMS的基本使用方法,希望你能够在工程设计中充分发挥ADAMS的优势。
模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩C incADAM 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知乙=50, z 2= 25,m = 4mm,「- 20 :,两个齿轮的厚度都是50mm1.启动 ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 在欢迎对话框中选择“ Create a newmodel”,在模型名称(Model name 栏中输入:dingzhouluenxi;在重力名称(Gravity )栏 中选择“ Earth Normal (-Global Y ) ”;在单位名称(Un its )栏 中选择“ MMKS -mm,kg,N,s,deg ”。
如图 1-1 所示。
图1-1 欢迎对话框2.设置工作环境2.1对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏 中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工 作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mn 和500mm 间距(Spaci ng ) 中的X 和丫都设置成50mm 然后点击“ OK 确定。
如图2-1所表示。
2.2 用鼠标左键点击选择(Select )图标共,控现在工IS? Sh 诃rmidig mill 金 K«E I ut^ril-az-广 T O I-KT制面板出具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom 图标 1 Working Grid SeLliiiyp Tfilt2血耙習CTW RIS ) iCSOOnn)nfai 曲t.Q ,在Set Jl IdilLali-QlLa-ai4:uai dpiOK H ^jjly图3-1设置圆柱体选项3.2在ADAMS/ViewT 作窗口中先用鼠标 任意左键选择点(0, 0, 0)mm 然后选择点(0, 50,0)。
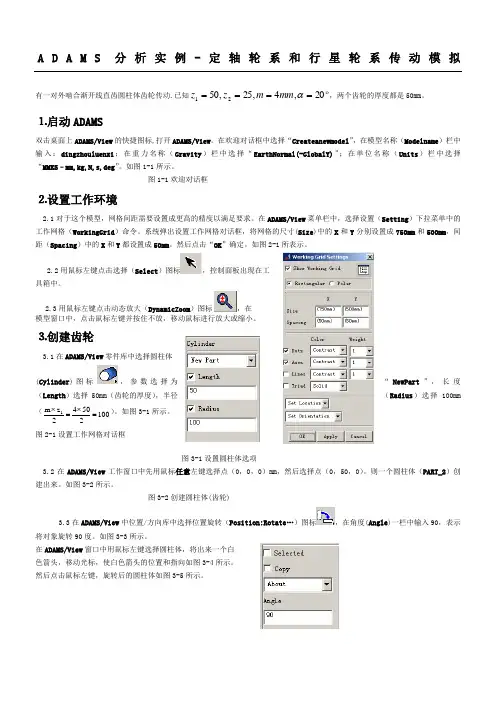
ADAMS 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知 20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
⒈ 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框⒉ 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮3.1 在ADAMS/View 零件库中选择圆柱体(Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm (10025042z m 1=⨯=⨯) 。
如图3-1所示。
图 2-1 设置工作网格对话框图3-1设置圆柱体选项3.2 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
ADAMS基础培训教程ADAMS实例教程新手必备
该软件是美国机械动力公司(Mechanical Dynamics Inc.)(现已并入美国MSC 公司)开
发的虚拟样机分析软件。
ADAMS已经被全世zhidao界各行各业的数百家主要制造商采用。
机械系统动力学仿真分析软件 ADAMS 可以直接创建完全参数化的机械系统几何模型,也可以使用从其他 CAD 软件(如: Pro/ENGINEER)传过来的造型逼真的几
何模型;然后
在几何模型上施加约束、力/力矩和运动激励;最后对机械系统进行交互式的动力
学仿真分析,在系统水平上真实地预测机械结构的工作性能,实现系统水平的最
优设计。
ADAMS软件由基本模块,扩展模块,接口模块,专业领域模块及工具箱5类模块组成,
如表3-1所示.用户不仅可以采用通用模块对一般的机械系统进行仿真,而且可以采
用专用模块针对特定工业应用领域的问题进行快速有效的建模与仿真分析.
本套教程不是教科书,不会玩弄概念,而是力求口语化和通俗化,让读者尽快入门,能让您高效率的学习进阶。
绝对不是网上那些烂大街的教程,浪费大家的宝贵时间。
教程不需要多,一套精品就够了。
教程部分截图:
学习是一个过程,只要学习就会有挑战。
天道酬勤,你越努力,就会越优秀。
教程之所以收费,是为了过滤一些拿了免费的,又不珍惜的人。
一点点的付出,买不了吃亏,买不了上当,一顿饭钱,一瓶水钱,就可以成就你。
诚信至上,感兴趣的朋友直接点击下方官方购买主页获取资源。
》》》《《《。
A D A M S 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知ο20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
⒈启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Createanewmodel ”,在模型名称(Modelname )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“EarthNormal(-GlobalY)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1欢迎对话框⒉设置工作环境2.1对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(WorkingGrid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
2.3用鼠标左键点击动态放大(DynamicZoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮3.1在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm(10025042z m 1=⨯=⨯)。
如图3-1所示。
图2-1设置工作网格对话框图3-1设置圆柱体选项3.2在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
夹紧机构的建模、分析及优化设计并优化一个夹紧机构,要求:1. 能产生至少800N的夹紧力。
2. 手动夹紧,用力不大于80N。
1 创建模型1.1 新建模型启动ADAMS/View,在欢迎对话框中选择New Model新建模型,在模型名称输入框中输入latch,将单位设置成MMKS,如图1-1所示。
图1-11.2设置工作环境单击菜单【Setting】 【Units】,将长度单位设置为厘米Centimeter。
在【Setting】菜单中选择【Working Grid】,在工作栅格设置对话框中,将工作栅格的X和Y尺寸(Size)设置为25,间距(Spacing)设置为1。
单击菜单【Setting】→【Icons】,弹出Icons设置对话框,将Model Icons 的所有缺省尺寸改为2。
1.3 建立参考点在【Bodies】→【Construction】中选择Point按钮,按照表1-1所列数据放置设计参考点。
点的设置选择Add to Ground和Don’t Attach。
Point table→create→apply,如图1-2所示。
表1-1图1-21.4 创建摇臂在【Bodies】→【Solids】中选择Plate按钮,将厚度与半径均设置成1cm,用鼠标左键点选Point_1、Point_2和Point_3,点击右键使曲柄闭合,如图1-2所示。
右键点击Part,选择Rename对模型进行重命名,命名为Pivot。
图1-21.5 创建手柄在【Bodies】→【Solids】中选择Link按钮,用鼠标左键点选Point_3、Point_4,创建连杆,如图1-3所示,并改名为Handle。
图1-31.6创建锁钩在【Bodies】→【Solids】中选择Extrusion按钮,选择“New Part”和“Closed”,设置“Length”为1cm,单击键盘上的F4,打开坐标窗口。
鼠标左键选择表1-2中11个位置,右键完成创建,如图1-4所示。
ADAMS入门教程.doc第一章弹簧挂锁设计问题介绍总论本指导教程将向你介绍如何运用机械系统动力学分析仿真软件ADAMS/View 解决工程问题。
我们假定你会循序渐进地学习本指导教程,因此在起始阶段我们会给予你较多的指导,伴随着你的进步,这样的指导就会逐渐减少。
如果你不想按照既定的顺序学习,那么你也可以在不同的地方将命令文件输入到ADAMS/View 中,并且从那里开始学习。
但如果这样,你会为了一些最基本的概念而不得不去参阅初始几章。
在每章的开始只要见到溶入标志,就可以找到该输入的文件名。
本章包括以下内容:你将学习的内容你将创建的模型你将学习的内容本指导教程将引导你进行如图 1 所示的设计步骤。
无论你在什么时候使用ADAMS/View 来创建和测试模型,你都须遵循以下七个基本步骤:1、创建一个包括运动件、运动副、柔性连接和作用力等在内的机械系统模型;2、通过模拟仿真模型在实际操作过程中的动作来测试所建模型;3、通过将模拟仿真结果与物理样机试验数据对照比较来验证所设计的方案;4、细化模型,使你的仿真测试数据符合物理样机试验数据;5、深化设计,评估系统模型针对不同的设计变量的灵敏度;6、优化设计方案,找到能够获得最佳性能的最优化设计组合;7、使各设计步骤自动化,以便你能迅速地测试不同的设计可选方案。
●你将建造的模型本指导教程将通过建立一个弹簧挂锁模型教你如何使用ADAMS/View。
在与Houston 的Manned Spacecraft Center 签订的一份合同中,North American Aviation,Inc. 的 Earl V. Holman 发明了一个挂锁模型,它能够将运输集装箱的两部分夹紧在一起,由此而产生了该弹簧挂锁的设计问题。
该模型共有十二个,在 Apollo 登月计划中,它们被用来夹紧登月仓。
前言随着科技的发展,计算机辅助设计技术越来越广泛地应用在各个设计领域。
现在,它已经突破了二维图纸电子化的框架,转向以三维实体建模、动力学模拟仿真和有限元分析为主线的虚拟样机制作技术。
使用虚拟样机技术可以在设计阶段预测产品的性能,优化产品的设计,缩短产品的研制周期,节约开发费用。
本书从最基础的入门讲起,介绍了建立虚拟样机软件在工程上的应用,以此推动虚拟样机技术在我国的普及。
机械系统动力学仿真分析软件ADAMS可以直接创建完全参数化的机械系统几何模型,也可以使用从其他CAD软件(如:Pro/ENGINEER)传过来的造型逼真的几何模型;然后,在几何模型上施加约束、力/力矩和运动激励;最后对机械系统进行交互式的动力学仿真分析,在系统水平上真实地预测机械结构的工作性能,实现系统水平的最优设计。
作为一名系统分析工程师,作者参加了多个国家级大型项目的研制工作,深深地体会到学习ADAMS软件的艰辛。
作者希望把这些年来在设计产品中使用ADAMS软件的经验感受贡献出来和大家分享,以使后来者能够更快地进入ADAMS软件提供的机械系统动力学仿真领域。
在本书各个章节中,结合大量的工程实例,通过图形化的说明和具体操作过程,介绍了ADAMS软件的设计流程、在动力学仿真分析方面的应用、ADAMS软件的二次开发以及ADAMS软件与控制软件和有限元分析软件的接口等等。
通过本书的学习,可以使您熟练地使用ADAMS软件并进行产品的系统分析。
本书的第一章、第二章由郭海涛编写,第三章、第四章和第八章由李军编写,第五章和第六章由邢俊文编写,第七章由覃文洁编写。
在编写过程中,得到了谷中丽教授的指导和MDI中国办事处的支持,在此表示感谢。
感谢所有为本书做出贡献的人。
由于时间仓促、作者水平有限,书中错误在所难免,欢迎广大读者批评指正。
编者— I —目 录第一章ADAMS 的界面1.1 ADAMS 简介ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(1) 1.2 ADAMS 的界面ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(2) 1.3 ADAMS 的零件库ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(4) 1.4 ADAMS 的约束库ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(6) 1.5 ADAMS 的设计流程ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(10)1.6 ADAMS 的分析和计算方法ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(12)1.6.1 广义坐标的选择ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(12) 1.6.2 动力学方程的建立ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(13) 1.6.3 动力学方程的求解ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(13)1.6.4 静力学分析、运动学分析和初始条件分析ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(15) 1.6.5 计算分析过程综述ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(18) 第二章 ADAMS 应用基础2.1 设置工作环境ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(19)2.2 创建物体ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(23) 2.3 创建约束副ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(36) 2.4 施加力ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(46)2.5 仿真和动画ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(49) 2.6 输出测量曲线ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(50)第三章 ADAMS 应用实例3.1 夹紧机构模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(53) 3.1.1 创建模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(54) 3.1.2 测试模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(65) 3.1.3 验证模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(68) 3.1.4 细化模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(73) 3.1.5 迭代模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(74) 3.1.6 优化设计ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(77) 3.1.7 定制界面ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(80) 3.2 汽车前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(87)3.2.1 创建前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(88) 3.2.2 测试前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(95)— II —3.2.3 细化前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(104)3.2.4 定制界面ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(109) 3.2.5 优化前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(116) 3.3 汽车整车模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(119) 3.3.1 创建底盘模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(119) 3.3.2 创建前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(120) 3.3.3 创建转向机构模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(124) 3.3.4 创建后悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(127) 3.3.5 创建轮胎和地面谱ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(129)3.3.6 仿真模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(134)第四章 ADAMS 应用中的技巧4.1 静平衡的求法ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(139) 4.1.1 建立模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(139) 4.1.2 建立微分方程ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(139) 4.1.3 定义作用力ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(139) 4.1.4 求解静平衡ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(140) 4.1.5 保存模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(141) 4.2 约束副的失效ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(141) 4.2.1 建立模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(141) 4.2.2 建立传感器ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(142) 4.2.3 描述仿真过程ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(142) 4.2.4 仿真模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(143) 4.2.5 保存模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(144) 4.3 碰撞力的解除ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(144) 4.3.1 建立模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(144) 4.3.2 创建碰撞力ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(146) 4.3.3 编辑宏命令ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(146) 4.3.4 创建命令菜单ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(148) 4.3.5 设置状态变量ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(149) 4.3.6 解除碰撞力ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(150) 4.3.7 仿真模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(150) 4.3.8 保存模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(150) 第五章 ADAMS/View 的用户化设计5.1 定制用户界面ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(151)5.1.1 定制菜单ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(152) 5.1.2 定制对话窗ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(153) 5.2 使用宏命令ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(157)。
ADAMS仿真
1.题目(题号:34)
2. 步骤
2.1建模
选择笛卡尔坐标系建模,并确定模型A点为坐标系中心位置,然后建立杆1,其与竖直平面的角度成60度夹角,在杆1上确定B点并建立杆竖直杆3,杆3与点3间的距离为h=400mm,最后在B点处画上滑块,完成建模。
2.2施加约束
建模完成后对模型添加约束,在摇杆1和大地之间在A点处添加转动副,在摇杆1和滑块2间添加移动副,在滑块2和竖直杆3间添加转动副,在竖直杆3和大地之间添加移动副.
2.3施加运动
在摇杆1上添加一个ω=6rad/s的角速度,逆时针方向。
2.4仿真设定
End time设置为20秒,steps设置为1000.再按播放按钮,即可看到其仿真运动。
3.仿真结果分析
1.竖直杆3的速度和加速度分析图。
2. 原动件杆1角度变化和竖直杆3的速度、加速度仿真关系图。
4.分析
由分析结果可以得出,当摇杆以ω=6rad/s的角速度,绕逆时针方向转动
时,开始时竖直杆3的速度不断增大,而此时其加速度是一个较稳定的值,之后竖直杆3的加速度不断减小,降至负值,此时其速度也一直在降低,并且也降至负值。
最后,竖直杆3的加速度不断增加,直至在一个正值处稳定下来,此时其速度不断增加,直至达到顶峰。
在图示位置处,摇杆1与竖直方向的夹角为60度,根据仿真可知,此时竖直杆3的速度为635.8mm/s,加速度为751.2mm/s2。
夹紧机构的建模、分析及优化
设计并优化一个夹紧机构,要求:
1. 能产生至少800N的夹紧力。
2. 手动夹紧,用力不大于80N。
1 创建模型
1.1 新建模型
启动ADAMS/View,在欢迎对话框中选择New Model新建模型,在模型名称输入框中
输入latch,将单位设置成MMKS,如图1-1所示。
图1-1
1.2设置工作环境
单击菜单【Setting】【Units】,将长度单位设置为厘米Centimeter。
在【Setting】菜单中选择【Working Grid】,在工作栅格设置对话框中,将工作栅格的X
和Y尺寸(Size)设置为25,间距(Spacing)设置为1。
单击菜单【Setting】【Icons】,弹出Icons设置对话框,将Model Icons 的所有缺省尺寸改为2。
1.3 建立参考点
在【Bodies】【Construction】中选择Point按钮,按照表1-1所列数据放置设计参
考点。
点的设置选择Add to Ground和Don’t Attach。
Point table create apply,如图1-2所示。
表1-1
图1-2
1.4 创建摇臂
在【Bodies】【Solids】中选择Plate按钮,将厚度与半径均设置成1cm,用鼠标左键点选Point_1、Point_2和Point_3,点击右键使曲柄闭合,如图1-2所示。
右键点击Part,选择Rename对模型进行重命名,命名为Pivot。
图1-2。
测量一重为1kg的石块下落的位移、速度、加速度曲线,时间为1s
点击new model,出现下面的对话框。
当然,你可以自己修改name为stone。选择units(单位),此时为默认。出现主界面。
点击键盘的F4就会出现坐标捕捉口,方便坐标捕捉。(其实这步可有可无,一般情况下,最
好有这步。)
选择球,半径为50mm
圆心为坐标原点。
接下来
质量为1kg,只有这一个参数。
下面是建立测量。
测量位移如下图:y轴的
此时点击apply。出现下面的曲线框,由于还没有仿真,故没有曲线,下同
速度曲线,当然还是y轴的
仍然点击apply
加速度曲线,如下
总的曲线如下图:
点击simulation,出现下面的框,设定时间为1s,按顺序依次点击:
此时就可以看到曲线在动态变化
任选一个曲线框,右击,进入full plot
注意上面一定要点选surf,才能出现所想要的曲线
通过上述仿真,可以看出位移为-4903.3mm,速度为-9806.6mm/s,加速度为-9806.6mm/s2