ADAMS基础培训-实例讲解
- 格式:ppt
- 大小:1.95 MB
- 文档页数:39
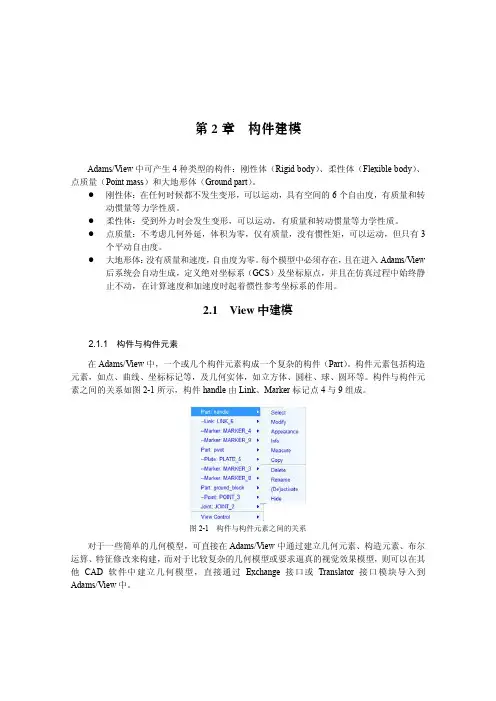
adams教程Adams教程-基本概念与应用Adams是一种重要的多体动力学仿真软件,广泛应用于机械工程、汽车工程、航空航天工程等领域。
本教程将介绍Adams的基本概念和应用,帮助读者快速入门并掌握该软件的基本操作技巧。
1. Adams简介Adams是一种基于多体动力学理论的仿真软件,能够模拟和分析复杂的机械系统的运动和力学行为。
它采用了基于弹簧、阻尼和惯性模型的多体动力学算法,能够准确地预测系统的运动轨迹、速度、加速度等关键参数。
2. Adams界面与基本操作Adams的界面直观友好,主要包括模型空间、运动学仿真、力学仿真等模块。
在模型空间中,可以创建和修改机械系统的模型;在运动学仿真模块中,可以模拟系统的运动轨迹;在力学仿真模块中,可以分析系统的力学特性。
3. 创建模型与约束在Adams中,模型的创建是基于几何图形和物体的属性。
可以通过导入CAD文件或者手动绘制几何图形来创建模型,并为每个模型设置合适的质量、惯性矩阵等属性。
通过添加约束条件,可以模拟系统中各个物体之间的相对运动关系。
4. 仿真与结果分析一旦模型和约束设置完成,就可以进行仿真分析了。
Adams提供了多种仿真方式,如动态仿真、静态仿真、优化仿真等。
仿真结果可以通过图表、动画等形式进行展示和分析,帮助工程师深入理解系统的运动行为和受力情况。
5. 应用案例最后,本教程将通过一些实际应用案例来展示Adams的具体应用。
例如,利用Adams模拟汽车悬挂系统的运动特性,预测系统在不同路况下的动力学行为;利用Adams模拟飞机起飞和着陆过程,评估系统在不同条件下的稳定性和安全性等等。
通过本教程的学习,读者将能够掌握Adams的基本操作技巧,理解多体动力学仿真的基本原理,并能够利用该软件进行机械系统的仿真分析。
希望读者能够通过这些知识和技能,在工程领域取得更好的成果。
ADAMS基础知识讲解(图文并茂)转载▼对新手来说,书无非是第一手好资料了,目前关于adams的中文书有如下:1. 《adams view高级培训教程》2. 《adams view基础培训教程》3. 《ADMAS虚拟样机技术入门与提高》4. 《虚拟样机技术及其在ADMAS上的实践》5. 《adams实例教程》6. 《ADAMS2005机械设计高级应用实例》7. 《机械系统动力学分析及adams应用教程》8. 《ADAMS入门详解与实例》9. 《车-路系统动力学中的虚拟样机:MSC.ADAMS软件应用实践》10. 《MSC.ADAMS RALI基础教程》……注释:以上部分资料在simwe或其他仿真论坛都有电子版,赶紧“搜索”去吧!三、软件安装篇1、adms12.0的安装说明:(1),运行SETUP,选取典型安装,选择模块时,要全选,然后建立一个文件夹。
(2),安装完成后,再安装ADAMS12.0的LICENSE,点击一下apply,然后连续按ENTER键,一直到完成为止。
(3),把光盘中的CRACK拷贝到硬盘里去,去掉只读属性,修改LICENSE.DAT,把LICENSE.DAT里的HOSTNAME改为自己的主机名,然后保存。
(4),再把保存好的LICENSE.DAT拷贝到D:\ADMS12\network下覆盖掉。
(5),重启。
(6),运行D:\ADMS12\network下的IMTOOLS文件,然后找到IMGRD.EXELICENSE.DAT它们所在的路径,然后保存,再START 就OK了。
2、adams2003安装方法/forum/viewt ... hlight=��װ3、adams2005如何安装/forum/viewt ... hlight=��װ4、patran和adams同时安装的解决方法/forum/viewt ... 2���5、ADAMS与MATLAB共存的问题/forum/viewt ...6������新手上路:ADAMS 基础知识讲解(图文并茂)【转载仿真论坛】(三)2010-01-27 19:31四、常见问题篇1、ADAMS中的单位问题开始的时候需要为模型设置单位。
前言随着科技的发展,计算机辅助设计技术越来越广泛地应用在各个设计领域。
现在,它已经突破了二维图纸电子化的框架,转向以三维实体建模、动力学模拟仿真和有限元分析为主线的虚拟样机制作技术。
使用虚拟样机技术可以在设计阶段预测产品的性能,优化产品的设计,缩短产品的研制周期,节约开发费用。
本书从最基础的入门讲起,介绍了建立虚拟样机软件在工程上的应用,以此推动虚拟样机技术在我国的普及。
机械系统动力学仿真分析软件ADAMS可以直接创建完全参数化的机械系统几何模型,也可以使用从其他CAD软件(如:Pro/ENGINEER)传过来的造型逼真的几何模型;然后,在几何模型上施加约束、力/力矩和运动激励;最后对机械系统进行交互式的动力学仿真分析,在系统水平上真实地预测机械结构的工作性能,实现系统水平的最优设计。
作为一名系统分析工程师,作者参加了多个国家级大型项目的研制工作,深深地体会到学习ADAMS软件的艰辛。
作者希望把这些年来在设计产品中使用ADAMS软件的经验感受贡献出来和大家分享,以使后来者能够更快地进入ADAMS软件提供的机械系统动力学仿真领域。
在本书各个章节中,结合大量的工程实例,通过图形化的说明和具体操作过程,介绍了ADAMS软件的设计流程、在动力学仿真分析方面的应用、ADAMS软件的二次开发以及ADAMS软件与控制软件和有限元分析软件的接口等等。
通过本书的学习,可以使您熟练地使用ADAMS软件并进行产品的系统分析。
本书的第一章、第二章由郭海涛编写,第三章、第四章和第八章由李军编写,第五章和第六章由邢俊文编写,第七章由覃文洁编写。
在编写过程中,得到了谷中丽教授的指导和MDI中国办事处的支持,在此表示感谢。
感谢所有为本书做出贡献的人。
由于时间仓促、作者水平有限,书中错误在所难免,欢迎广大读者批评指正。
编者— I —目 录第一章ADAMS 的界面1.1 ADAMS 简介ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(1) 1.2 ADAMS 的界面ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(2) 1.3 ADAMS 的零件库ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(4) 1.4 ADAMS 的约束库ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(6) 1.5 ADAMS 的设计流程ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(10)1.6 ADAMS 的分析和计算方法ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(12)1.6.1 广义坐标的选择ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(12) 1.6.2 动力学方程的建立ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(13) 1.6.3 动力学方程的求解ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(13)1.6.4 静力学分析、运动学分析和初始条件分析ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(15) 1.6.5 计算分析过程综述ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(18) 第二章 ADAMS 应用基础2.1 设置工作环境ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(19)2.2 创建物体ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(23) 2.3 创建约束副ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(36) 2.4 施加力ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(46)2.5 仿真和动画ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(49) 2.6 输出测量曲线ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(50)第三章 ADAMS 应用实例3.1 夹紧机构模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(53) 3.1.1 创建模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(54) 3.1.2 测试模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(65) 3.1.3 验证模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(68) 3.1.4 细化模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(73) 3.1.5 迭代模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(74) 3.1.6 优化设计ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(77) 3.1.7 定制界面ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(80) 3.2 汽车前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(87)3.2.1 创建前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(88) 3.2.2 测试前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(95)— II —3.2.3 细化前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(104)3.2.4 定制界面ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(109) 3.2.5 优化前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(116) 3.3 汽车整车模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(119) 3.3.1 创建底盘模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(119) 3.3.2 创建前悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(120) 3.3.3 创建转向机构模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(124) 3.3.4 创建后悬架模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(127) 3.3.5 创建轮胎和地面谱ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(129)3.3.6 仿真模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(134)第四章 ADAMS 应用中的技巧4.1 静平衡的求法ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(139) 4.1.1 建立模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(139) 4.1.2 建立微分方程ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(139) 4.1.3 定义作用力ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(139) 4.1.4 求解静平衡ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(140) 4.1.5 保存模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(141) 4.2 约束副的失效ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(141) 4.2.1 建立模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(141) 4.2.2 建立传感器ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(142) 4.2.3 描述仿真过程ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(142) 4.2.4 仿真模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(143) 4.2.5 保存模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(144) 4.3 碰撞力的解除ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(144) 4.3.1 建立模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(144) 4.3.2 创建碰撞力ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(146) 4.3.3 编辑宏命令ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(146) 4.3.4 创建命令菜单ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(148) 4.3.5 设置状态变量ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(149) 4.3.6 解除碰撞力ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(150) 4.3.7 仿真模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(150) 4.3.8 保存模型ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(150) 第五章 ADAMS/View 的用户化设计5.1 定制用户界面ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(151)5.1.1 定制菜单ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(152) 5.1.2 定制对话窗ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(153) 5.2 使用宏命令ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ(157)。
ADAMS仿真
1.题目(题号:34)
2. 步骤
2.1建模
选择笛卡尔坐标系建模,并确定模型A点为坐标系中心位置,然后建立杆1,其与竖直平面的角度成60度夹角,在杆1上确定B点并建立杆竖直杆3,杆3与点3间的距离为h=400mm,最后在B点处画上滑块,完成建模。
2.2施加约束
建模完成后对模型添加约束,在摇杆1和大地之间在A点处添加转动副,在摇杆1和滑块2间添加移动副,在滑块2和竖直杆3间添加转动副,在竖直杆3和大地之间添加移动副.
2.3施加运动
在摇杆1上添加一个ω=6rad/s的角速度,逆时针方向。
2.4仿真设定
End time设置为20秒,steps设置为1000.再按播放按钮,即可看到其仿真运动。
3.仿真结果分析
1.竖直杆3的速度和加速度分析图。
2. 原动件杆1角度变化和竖直杆3的速度、加速度仿真关系图。
4.分析
由分析结果可以得出,当摇杆以ω=6rad/s的角速度,绕逆时针方向转动
时,开始时竖直杆3的速度不断增大,而此时其加速度是一个较稳定的值,之后竖直杆3的加速度不断减小,降至负值,此时其速度也一直在降低,并且也降至负值。
最后,竖直杆3的加速度不断增加,直至在一个正值处稳定下来,此时其速度不断增加,直至达到顶峰。
在图示位置处,摇杆1与竖直方向的夹角为60度,根据仿真可知,此时竖直杆3的速度为635.8mm/s,加速度为751.2mm/s2。
Adams 2020 是一款广泛应用于工程领域的多体动力学仿真软件,它可以用来模拟各种机械系统的运动行为,并进行动力学分析和优化设计。
本教程将带领读者深入了解 Adams 2020 软件的基本操作和应用技巧,并通过实例演示,让读者能够更好地掌握该软件的使用方法。
本教程将分为以下几个部分进行详细介绍:一、 Adams 2020 简介Adams 2020 是由美国Mechanical Dynamics公司开发的一款专业多体动力学仿真软件,目前已经成为全球范围内的工程师和研究人员首选的仿真工具之一。
Adams 2020 软件拥有强大的模型建立和仿真分析功能,可以对机械系统的运动行为进行准确的模拟,并提供丰富的分析结果,为工程设计和优化提供有力的支持。
二、 Adams 2020 的基本操作1. 软件安装和环境配置在开始学习 Adams 2020 软件之前,首先需要进行软件的安装和环境配置。
本教程将详细介绍 Adams 2020 软件的安装步骤和环境配置方法,确保读者能够顺利地运行该软件,并进行后续的操作和学习。
2. 模型建立与约束设置在 Adams 2020 软件中,模型建立和约束设置是仿真分析的基础。
本教程将演示如何在 Adams 2020 中建立机械系统的模型,并设置各种约束条件,包括刚性约束、连接约束等,以确保模型的合理性和准确性。
3. 运动学分析与动力学分析Adams 2020 软件可以进行运动学分析和动力学分析,以研究机械系统的运动特性和受力情况。
本教程将介绍如何在 Adams 2020 中进行运动学分析和动力学分析,并解释分析结果的含义和应用。
三、 Adams 2020 的应用技巧1. 模型优化与性能评估Adams 2020 软件可以用于模型优化和性能评估,以改进机械系统的设计和性能。
本教程将介绍如何利用 Adams 2020 进行模型优化和性能评估,包括参数优化、结构优化等方法。
2. 系统耦合与多体联动仿真在工程实际应用中,往往需要进行系统耦合和多体联动仿真分析。