基于LabVIEW的水槽造波机控制系统的开发
- 格式:pdf
- 大小:290.95 KB
- 文档页数:4

基于labview的液面控制系统设计【摘要】 labview软件使用流程图编程,具有开放性,模块化,可重复性、互换性等特点,并且与外部硬件连接方便,可以实现实时控制,进行硬件在环仿真实验。
【关键词】虚拟仪器;labview;硬件在环;时滞;预测控制;动态矩阵labview是一种程序开发环境,与其他计算机语言的显著区别是,labview软件使用流程图编程,具有开放性,模块化,可重复性、互换性等特点,并且与外部硬件连接方便,可以实现实时控制,进行硬件在环仿真实验。
一、液位控制系统建立整个液位控制系统由控制器、电动调节阀、上水箱、中水箱、下水箱和液位变送器模块等组成。
控制器的输出量用于控制电动调节阀的开度。
1.液位控制系统的控制目标水箱的液位变化范围为h=0~200mm,要求通过设计合适的控制器,能使下水箱的液位稳、准、快的稳定在给定的液位上,稳态液位误差不超过5mm。
当水箱发生扰动(正扰动或者负扰动)时,被控量能迅速恢复到系统原来所要求的液位值。
2.液位被控对象模型该系统是由三个单容水箱组成,其中每一个水箱对象为一个一阶惯性环节,且具有自平衡性。
我们的目的是控制下水箱的液位,被控系统是由三个水箱的串联则组成。
给调节阀一个阶跃输入信号,测量系统的阶跃响应曲线。
可见τ/t接近0.3系统存在时滞现象,所以该系统是一个具有时滞的液位控制系统。
由于系统就有时滞特性,并且模型是可变的,存在干扰,为了达到良好的控制效果,普通的pid控制算法是满足不了要求的。
鉴于预测控制的特点,我们选用预测控制算法进行液位控制。
二、液位测控系统的硬件组成控制算法的实现是以实际控制系统的建立为基础。
因此在设计控制算法程序之前,应该根据实际控制系统的需要以及性能价格比选择合适的控制硬件组成实际的控制系统,并分析被控对象的动态特性,达到一定的控制目的。
三、液位测控平台的软件介绍1.虚拟仪器简介与传统仪器相比,虚拟仪器具有更大的开放性,模块化,可重复性、互换性等特点。
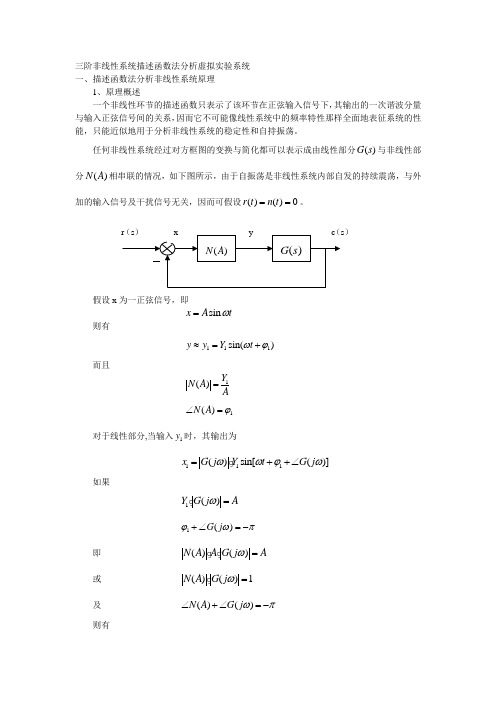
三阶非线性系统描述函数法分析虚拟实验系统一、描述函数法分析非线性系统原理1、原理概述一个非线性环节的描述函数只表示了该环节在正弦输入信号下,其输出的一次谐波分量与输入正弦信号间的关系,因而它不可能像线性系统中的频率特性那样全面地表征系统的性能,只能近似地用于分析非线性系统的稳定性和自持振荡。
任何非线性系统经过对方框图的变换与简化都可以表示成由线性部分()G s 与非线性部分()N A 相串联的情况,如下图所示,由于自振荡是非线性系统内部自发的持续震荡,与外加的输入信号及干扰信号无关,因而可假设()()0r t n t ==。
假设x 为一正弦信号,即sin x A t ω=则有111sin()y y Y t ωϕ≈=+而且1()Y N A A= 1()N A ϕ∠=对于线性部分,当输入1y 时,其输出为111()sin[()]x G j Y t G j ωωϕω=++∠如果1()Y G j A ω=1()G j ϕωπ+∠=-即 ()()N A A G j A ω=或 ()()1N A G j ω=及 ()()N A G j ωπ∠+∠=-则有1sin()sin x A t A t x ωπω=-=-=-故在没有外信号作用下,系统有一个正弦振荡输出信号。
而系统有一个正弦振荡运动解的充要条件是()()1N A G j ω=- (8-1)对于某一个特定的0A 及0ω,式(8-1)成立,会产生等幅的周期性震荡,这相当于线性系统中()1G j ω=-的情况。
由上式得1()()G j N A ω=- (8-2) 式中,1()N A -称为负倒描述函数,它相当于线性系统中的(-1,j0)点。
已知在线性系统中,闭环特征方程为1()0k G j ω+=。
而在非线性系统中,闭环特征方程为1()()0G j N A ω+=。
将线性部分的()G j ω曲线与负倒描述函数1()N A -曲线画在同一复平面上,两曲线的交点即满足式(8-2),由此可确定系统的周期运动解,求得0A 和0ω。

基于LabVIEW的土槽车振动测试系统的开发与应用方案(图2)。
[FK(W13][TPCXR2.tif]2.1数据采集模块振动测试系统主要是拾取土槽试验台的振动信号和实现对各种参数的控制[12],如对数据采集卡、采集通道的选择以及采样率、点数、段数的控制等。
测试系统使用的采集卡为一款基于笔记本计算机PCMCIA插槽技术的DAQCARD-AI-16E-4采集卡[13],信号调理卡为SC-2040,可实现8通道同步采样和保持,而且各通道可以选择不同的增益。
假设传感器检测到的振动信号与采样信号分别用X(t)和g(t)表示,输入的振动信号用X(t)表示,经过采样离散的振动信号用X(nTs)来表示,采样的脉冲序列周期用Ts来表示,则采样的表达式如下:Xs(nTs)=X(t)∑[DD(]+∞n=-∞[DD)]δ(t-nTs)=∑[DD(]+∞n=-∞[DD)]X(nTs)δ(t-nTs)。
[JY](1)其中:δ(t)是单位脉冲序列,即采樣函数,图3为数据采集模块采样过程。
2.2数据处理模块采集的信号中即存在有用的信息(如试验台架最大振幅),也存在很多干扰信号(如噪声干扰)[14],所以数据处理的首要任务是对所采集信号进行数字滤波处理。
由于土槽试验台车的工作频率在0~25 Hz,所以本系统在虚拟仪器软件平台所实现的滤波器为低通滤波器。
2.2.1时域分析模块时域分析是指振动信号在时间域进行的方法,此分析模块主要是显示振动波形、统计各种特征值[15]。
将滤波后的信号直接显示在LabVIEW前面板的示波器上,可以直观地对振动波形进行分析,此时的波形随时间变化而变化,在前面板中可以直接观察信号的变化情况和曲线的各个振动幅值。
2.2.2频域分析模块根据分析时域是很难对振动信号的特征作出准确判断的[15],所以在分析振动信号的过程中,频域分析是一项关键的分析技术,而频谱分析是在频率域对信号分析的重要技术[16]。
相对于时域分析技术而言,频谱分析技术能够获得更多的有用信息,如各个频率成分的幅值分布、频率成分的能量分布、振动信号的总振级、振动信号的最大值频率、最大幅度值等。

基于LabVIEW的旋臂水池远程测控系统开发
刘乐平;王亮
【期刊名称】《测控技术》
【年(卷),期】2007(026)007
【摘要】旋臂水池试验台是一套用于测量船舶水动力系数的试验设备,传统的试验台不能进行买时监控,而且对旋臂转动和船模姿态没有进行综合控制,需要多人通过对讲机进行控制,效率低而且容易出现误操作.为改善试验性能,基于NI公司的相关硬件和LabvIEW软件开发平台,设计了一套基于虚拟仪器技术的远程测控系统,该系统包括了数据采集子系统和综合控制管理子系统.初步试验表明该系统使用方便,提高了效率.
【总页数】4页(P41-44)
【作者】刘乐平;王亮
【作者单位】北京航空航天大学自动化科学与电气工程学院,北京100083;北京航空航天大学自动化科学与电气工程学院,北京100083
【正文语种】中文
【中图分类】TP2
【相关文献】
1.基于LabVIEW的超高压气体远程测控系统设计 [J], 杨俊卿;仝继钢;雷晓峰;江澎
2.基于LabVIEW远程测控技术的实现 [J], 李宁;乐伟伟
3.基于labview的水泵远程测控系统的设计与实现 [J], 范志华;杨光;苏成贵;钟文
才;
4.基于labview的水泵远程测控系统的设计与实现 [J], 范志华;杨光;苏成贵;钟文才
5.基于LabVIEW和WiFi的阳光导入器远程测控系统 [J], ZHANG Jun;BAI Tao;LI Yibin;TAO Jun;ZHANG Xinrong
因版权原因,仅展示原文概要,查看原文内容请购买。
- 50 -第11期2018年6月No.11June,2018水电厂检测水下机器人主要用于静水条件下检测水电站大坝坝面(水下部分)、输水管道、进出水口闸门等水工建筑物和水工设备运行状况。
由于水下环境较为复杂,其上位机控制软件除了需要完成对水下机器人水下运动的精确控制外,还需要其能在极短的时间内反馈系统状态信息,这就要求上位机控制软件能实时快速地向下位机发送控制命令,同时快速获取下位机的精确测量和反馈数据,同时实现控制信号的精确微调,各种应急状态的及时处理等[1]。
1 系统架构本文所述水下机器人上位机控制软件,通过LabVIEW 编写,在NI RT 控制器上实时运行。
软件完成手操盒控制命令读取,状态显示,运动控制,自主返航,故障监测,电源管理,设备控制,报警处理以及安全关机等功能。
水下机器人控制系统的硬件分为水面控制单元(上位机)和水下控制系统(下位机),二者都采用美国国家仪器(National Instruments ,NI )的实时控制器,通过光纤以太网相连。
上位机控制软件主要负责人机交互,数据存储显示,与外接设备(手操盒)通信,还有发送相关控制命令给下位机。
水面控制单元的控制器采用CompactDAQ 系列的控制器。
这一系列的控制器可以外接显示器、鼠标键盘,自身带有RS485串口,可以方便地与手持控制器(手操盒)等设备连接,体积小巧轻便,是一款理想的上位机。
上位机接有鼠标键盘和显示器,并通过自身的RS485串口与手操盒连接。
手操盒用于控制水下机器人的运动[2]。
2 上位机程序一个LabVIEW 程序(VI )包括前面板和程序框图。
前面板是界面,没有实际逻辑功能;程序框图是程序逻辑和函数的组合,但是没有显示读取功能。
利用VI 的这个特点,将上位机程序分成两部分:界面程序和主程序。
界面程序只是在前面板显示相关状态,进行设备的控制,但程序框图不执行任何逻辑,只是将界面控件的引用传递给主程序;主程序的程序框图执行上位机程序的具体逻辑,但是前面板不具有实际意义的显示功能,只是接收界面程序的控件引用。
利用LabVIEW进行电机控制与调试LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一款基于图形化编程语言的开发环境,广泛应用于科学与工程领域的数据采集、分析、控制以及调试等方面。
本文介绍如何利用LabVIEW进行电机控制与调试,包括步进电机和直流电机的控制方法以及相关调试技巧。
一、步进电机控制步进电机是一种离散控制的电机,通过对电机驱动成组的正向或反向脉冲信号,实现旋转角度的精确控制。
LabVIEW提供了丰富的工具和函数来实现步进电机的控制。
首先,在LabVIEW中创建一个新的VI(Virtual Instrument)文件。
在Block Diagram中选择一个While Loop,并在循环内部添加若干个控制步进电机运动的代码。
例如,可以通过控制单个IO口的高低电平来实现脉冲信号的输出。
使用LabVIEW中的Digital Output模块,将其配置为输出模式,并将其与步进电机驱动器的脉冲接口连接。
然后,在每次循环迭代中,将该IO口的电平设置为高电平,然后延时适当时间,再将其设置为低电平,即可输出一个脉冲信号。
此外,还可以通过使用计数器或定时器模块来生成脉冲信号。
LabVIEW中的Counter和Timer模块可以方便地设置计数器的初值、计数范围以及计数速率。
通过适当的配置和调试,可以实现步进电机的精确控制。
二、直流电机控制直流电机是一种常见的电动机类型,广泛应用于各种机械设备中。
LabVIEW也提供了多种方法来实现直流电机的控制。
首先,在LabVIEW中创建一个新的VI文件。
使用LabVIEW中的Analog Output模块来生成电机驱动信号。
将Analog Output模块与直流电机驱动器的控制端口连接,通过调整模块输出的电压值,可以实现对直流电机的转速和方向的控制。
LabVIEW还提供了PID控制器模块,可用于进一步优化直流电机的控制效果。
基于LabVIEW的水质监测系统设计与开发王诗源;袁琦【摘要】为实现水产养殖过程中,水质参数监测系统的信号采集简便、数据无线传输以及操作界面简单便捷,且上位机之间能够实现数据共享,设计了一种基于LabVIEW 的水产养殖水质参数监测系统.该系统以MSP430微控制器为下位机,以nRF905为数据收发模块,中心电脑端(PC机)为上位机,通过LabVIEW构建上位机监控软件,同时采用基于TCP协议的通信方式进行远程通信,LabVIEW的虚拟仪器可以实现计算机数据共享通信功能,从而实现对重要水质参数进行监测以及数据共享.试验过程采集到的数据与标定仪器测量数据,误差在2%以内,丢包率低,能实现上位机之间的数据共享.研究表明,整套系统数据采集结果正常、稳定性良好,系统控制界面简洁,操作简便,且具有性价比高和易扩展等优点.%In order to realize convenient signal collection of water quality monitoring system,data wireless transmission,simple and convenient operation interface,as well as the data sharing between the upper computers,an aquaculture water quality parameter monitoring system based on LabVIEW was designed.This system established the upper computer monitoring software by using MSP430 micro-controller as lower computer,nRF905 as data transceiver module and PC as upper computer through LabVIEW,and achieved remote communication based on TCP bVIEW virtual instrument could realize computer data sharing communication function so that it could realize the monitoring of important water quality parameters and data sharing.The error of the experimental data collected by the tests and the calibration instrument is less than 2%,where the packet loss rate is low,andthe data sharing between the upper computers can be realized.The results showed that the data collection was normal and stable,the controlling interface of this system is simple and easy to operate,in addition,it has the advantages of high cost performance and extendibility.【期刊名称】《渔业现代化》【年(卷),期】2018(045)001【总页数】6页(P63-68)【关键词】水产养殖;水质参数;LabVIEW;数据共享【作者】王诗源;袁琦【作者单位】海南大学机电工程学院,海南海口 570228;海南大学机电工程学院,海南海口 570228【正文语种】中文【中图分类】S951.2水产养殖环境因子对水生动植物有决定性作用,直接影响其产量与品质。
2008年8月第4期总第182期港工技术PortEn舀neeringTechnologyAug.20087IIotal182No.4
基于LabVIEW的水槽造波机控制系统的开发白志刚,张志显,路宽(天津大学建筑工程学院。天津300072)
摘要:以天津大学海岸工程实验室长×宽×高=90m×2m×1.8
m的双轴推板式波浪水槽为对象,开发基于【abVIEW的造波
机控制系统。该系统包括造波计算、运动控制、状态监视以及数据采集等部分,实现在水槽造波机上的多轴同步控制。该系统可以实现多种规则波和不规则波的模拟,具有友好直观的人机界面。操作方便。对于虚拟仪器技术及hbVIEW在造波机控制领域的应用具有重要意义。关键词:虚拟仪器;LabVIEW;造波机;运动控制中图分类号:P742:0242.1文献标志码:A文章编号:1004.9592(2008)04加001。04
DeVelopmentofFlumeWaVemal【ingControlSystemBasedon
LabVⅢW
BaiZhigang,ZhangZhixian,LuKuan(CollegeofCi词En函n∞一Ilg。TianjinUIliVers时,Tianjin30∞72。Clli衄)
Abstract:BasedonLabVIEW,a脚oaxiseswave眦kingcon咖lsystemh鹊beendevelopedina
90m
long,
2mwide觚d1.8mhighwavenumeequippedwithtw-owavemake瑙driVedbyACsen,o咖tolls.7Ihiscontml
systemcontaindatacalculatingmodule,motioncontrollingmodule,motionwatchingmodule粕dwavedatacoUec・
tionInodule.Thissystemc柚beusedtogeneratesomeregularwavesofdi丑.eremperiodsandsomein-egular
waves,haveasimple,intuitionisticand衔endlyuser’sinte—‰e趴disconVeIIienttooperate.Awayof印plyingLlbVIEWinwavemakercontrolsystemw蹈creatived.Keywords:vinualinstmment;LabVIEW;wave眦ker;motioncon咖l
模型试验是研究港口、船舶、海岸及海洋工程结构物在波浪作用下的运动、受力和安全性等问题的重要方法.要进行这种试验,就必须在水槽或水池中模拟海洋环境条件。其中海浪的模拟是最主要的因素【11。因此,能够在水槽或水池中模拟实际海浪的造波系统是与试验水槽或水池相配套的大型基础设备。完整的造波系统不仅包括完备的硬件设施,还包括完善的控制系统软件。控制系统软件是整个造波系统的灵魂,它直接决定了造波类型、造波精度、造波控制的人性化程度。传统的造波机控制系统常常采用FORTRAN和VC、Delphi等语言混合编程来实现嘲。这种方法利收稿日期:200r7m1.30修回日期:2008-05・30作者简介:白志刚(1966.),男,副教授,主要从事海岸水动力学数学模型研究。用了FORTRAN在数据计算方面的强大优势进行造波计算,并生成动态链接库或可执行文件;然后用VC或Delphi编程调用这些动态链接库或可执行文件。并编制运动控制程序以及用户界面。这种方法存在以下不足:1)用户界面不够友好,操作性差;2)至少需用2种语言,存在语言交接问题,编程较麻烦;3)可实现的控制和测量功能偏少。采用基于LabVIEW的造波机控制系统则克服了以上问题。【abVIEW是1986年美国国家仪器公司(NI公司)。随同虚拟仪器技术一起推出的一种图形化的编程语言。在数据采集控制方面。协VIEW是一个功
能强大的工具,它不仅具备强大的计算能力,可以方便地编制测控程序,而且可以生成友好直观、操作简便的用户界面。mVIEW是一种语言。具有既可胜
任造波控制系统所有程序的编制。而且还可实现其
万方数据・2・港工技术2008年第4期他语言不便实现的功能舢]。1造波机组成及工作原理天津大学港口与海岸工程实验室.新建了一个长90m,宽2m,深1.8m的造波水槽。该水槽造波
系统采用NI公司生产的PCI一7342型运动控制卡装配主控计算机,采用2块造波板由2台交流伺服电机驱动来实现同步控制。众所周知,只要给水面扰动,水面就会产生波浪。这种扰动如果是周期性的,则在水面上产生规则的、具有和扰动相同周期的波浪(如余弦波);如果是非周期性的,则产生不规则的波浪。以造不规则波为例,推板式造波机的工作过程如下:1)选定波浪类型,给定波浪参数,生成目标谱;2)通过特定函数的转换,把波浪目标谱转换成造波板的驱动谱:3)通过频域到时域的转换,生成造波板位置时序列。以上3步都在计算机上完成;4)计算机通过编制的软件,把造波板位置时序列交给运动控制卡;5)控制卡按给定的位置时序列,生成运动轨迹,并通过电压脉冲信号发给伺服驱动器:6)伺服驱动器直接控制电机,按控制卡给定的信号转动,从而带动造波板产生期望的波浪;同时电机编码器把电机的转动情况反馈给运动控制卡,从而实现闭环控制。2造波计算模块控制系统软件设计的过程中,可以采用模块化设计。j按照功能不同,采用以下4类模块:造波计算、运动控制、运行状态监视以及波浪参数统计模块。以模拟P—M谱(一种不规则波)为例,介绍造波计算模块设计思路同。P—M谱造波计算可分为谱的生成、谱的转换以及谱到时序列等几个步骤。1)谱的生成P—M谱的计算公式表示为s(咖等exp(-器)’(1)
其谱峰频率为∞庐1.253/、/见。(2)在式(1)中把圆频率∞离散化,取100个离散点。下限取谱峰频率的0.3~0.5倍,上限取谱峰频率的3 ̄4倍,然后给定有效波高既可得到目标谱。在LabVIEW环境中。可以通过公式编辑子VI来编辑
式(1)和式(2)。2)谱的转换[8,9]得到波浪目标谱后,需进行谱的转换,将其转换成造波板的驱动谱,其转换公式为&(∞)=&(∞)/Ir(∞)12,(3)式中r(∞)为造波机的传递函数。3)谱到时序列得到造波板的驱动谱之后.通过从频域到时域的转换,既可得到造波板位置时序列。通常使用的转换方法为线性波浪叠加法。由谱到时序列的计算公式为肘一
叼(£)=∑、/2s聊(五)幽icos幽+占J。
(4)
l=1以上3步骤运用协VIEW实现。见图1。
图1造渡计算前面板3运动控制模块运动控制模块的主要任务是执行上面产生的造波板位置时序列。它可分为2部分:工作和调整。工作模块负责执行造波;调整模块包括前进、后退以及回零调整.是为正式造波作准备【101。运动控制模块运用LabVIEW实现,见图2。1)工作模块程序流程正式造波前,必须确定造波板在零位置,否则可能发生超行程的危险。为了防止这种危险,本模块特意作了在造波开始之前先检查造波板是否在零位的设计,如果不在,则不进行造波;同时,造波之前,也必须把编码器清零,如果不清零,驱动器使能后,不仅使机械受到极大冲击,而且也有超行程的危险;其次。因为本水槽使用了2台电机,在造波之前应使它们同步,造波之后,由于可能会进行单轴操作,所以应取消同步;最后,应在造波之前一时刻,使伺服驱
万方数据万方数据・4・港工技术2008年第4期训/\f/
1
眦\~V
\J.』
时间,s图8带波前的实测波形从图7中可以看出。运用试验设计的控制系统进行余弦波打波试验时,不同周期与波高的实测波形与理论波形吻合极好。从图8带波前的实测波形可以看出,波浪在稳定之后,波高变化很小,波形重复性能极佳。这足以证明设计的控制系统适用于余弦波的造波控制。2)不规则波试验验证为了验证本系统对不规则波造波的支持.进行了JONSWAP谱、P.M谱的试验。试验中采用了该水槽造波系统比较可靠的传递函数(通过大量率定试验而得),有效波高均为160mm,有效周期2.0s,水深1.04m。实测谱的估计利用相关函数法。实测谱与靶谱的比较。见图9和图10。,龟巳¥煞龆拯,龟宕¥煞龆艇图9JONSWAP谱图10P—M谱从图9和图10中可以看出。利用本控制系统进行不规则波模拟时。得到的实测谱与目标谱吻合得很好,尤其是P.M谱,充分说明本控制系统也适用于不规则波的造波控制。7结论以双轴推板式水槽为对象.运用LabVIEW编制造波机控制系统进行尝试获得成功.其结果表明:I矗bVIEW完全适用于造波机控制领域。采用LabVIEW编制造波机控制系统具有以下优点:1)使用‰VIEW一种语言既可完成造波计算、运动控制、运行状态监视以及数据采集等程序的编制,不存在多种语言之间的对接问题;2)利用IJabVIEW编程时可以自动产生用户界面,免去了需要单独编制用户界面的麻烦;3)运用LabVIEW编制的程序,界面更友好,操作更方便,显示更直观;4)运用LabVIEW可以很方便地编制一些测控、采集以及监视程序,其它语言则很难实现;5)IJabVIEW编程效率高,尤其是调试程序时间大为减少。综上.利用‰VIEW图形化编程语言开发造波
机控制系统的方法,可供相关领域研究借鉴。参考文献:[1]吴宋仁.海岸动力学[M].北京:人民交通出版社,2000.[2]徐翔.推板式造波机控制系统设计及模拟造波实验[D].广州:中山大学,2002.[3]王崇贤.二维波浪水槽造波控制系统研究[D].天津:天津大学.2005.[4]周求湛,钱志鸿,等.虚拟仪器与IJabVIEW7ExpresB程
序设计[M].北京:北京航空航天大学出版社,2004.[5]邓焱,王磊.hbVIEW7.1测试技术与仪器应用[M].北京:机械工业出版社。2004.[6]John∞nQlryW,mchardJenllings.IabVIEW图形编程
[M].武嘉澍,陆劲昆,译.北京:北京大学出版社,2002.[7]邱大洪.波浪理论及其在工程中的应用[M].北京:高等教育出版社。1985.[8]俞聿修.随机波浪及其工程应用[M].大连:大连理工大学出版社.2000.[9]徐德伦,于定勇.随机海浪理论[M].北京:高等教育出版社.2001.[10]尚涛.机电控制系统设计[M].北京:化学工业出版社,2006.[11]王剑.基于hbVIEW的数据采集及分析系统的开发
[D].哈尔滨:哈尔滨理工大学,2004.
日里匿瓣薹吼叫姒叭帆啪咖瞄咖nQnO0nOO0
n
万方数据