驻车制动设计计算
- 格式:pdf
- 大小:2.00 MB
- 文档页数:3
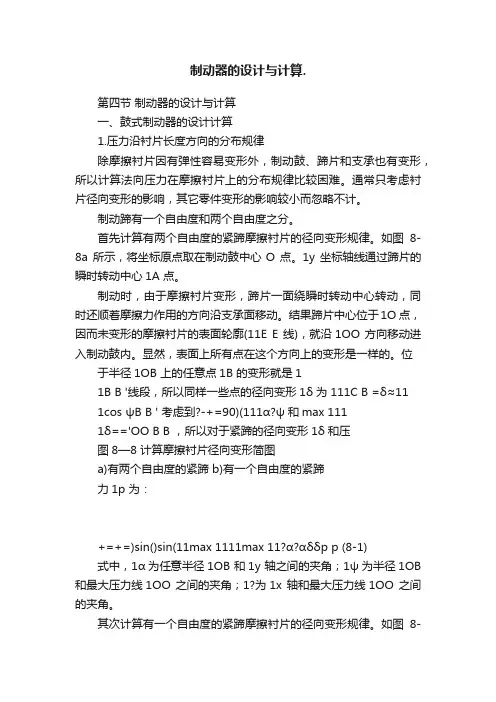
制动器的设计与计算.第四节制动器的设计与计算一、鼓式制动器的设计计算1.压力沿衬片长度方向的分布规律除摩擦衬片因有弹性容易变形外,制动鼓、蹄片和支承也有变形,所以计算法向压力在摩擦衬片上的分布规律比较困难。
通常只考虑衬片径向变形的影响,其它零件变形的影响较小而忽略不计。
制动蹄有一个自由度和两个自由度之分。
首先计算有两个自由度的紧蹄摩擦衬片的径向变形规律。
如图8-8a 所示,将坐标原点取在制动鼓中心O 点。
1y 坐标轴线通过蹄片的瞬时转动中心1A 点。
制动时,由于摩擦衬片变形,蹄片一面绕瞬时转动中心转动,同时还顺着摩擦力作用的方向沿支承面移动。
结果蹄片中心位于1O 点,因而未变形的摩擦衬片的表面轮廓(11E E 线),就沿1OO 方向移动进入制动鼓内。
显然,表面上所有点在这个方向上的变形是一样的。
位于半径1OB 上的任意点1B 的变形就是11B B '线段,所以同样一些点的径向变形1δ为 111C B =δ≈111cos ψB B ' 考虑到?-+=90)(111α?ψ和max 1111δ=='OO B B ,所以对于紧蹄的径向变形1δ和压图8—8 计算摩擦衬片径向变形简图a)有两个自由度的紧蹄 b)有一个自由度的紧蹄力1p 为:+=+=)sin()sin(11max 1111max 11?α?αδδp p (8-1)式中,1α为任意半径1OB 和1y 轴之间的夹角;1ψ为半径1OB 和最大压力线1OO 之间的夹角;1?为1x 轴和最大压力线1OO 之间的夹角。
其次计算有一个自由度的紧蹄摩擦衬片的径向变形规律。
如图8-8b 所示,此时蹄片在张开力和摩擦力作用下,绕支承销1A 转动γd 角。
摩擦衬片表面任意点1B 沿蹄片转动的切线方向的变形就是线段11B B ',其径向变形分量是这个线段在半径1OB 延长线上的投影,即为11C B 线段。
由于γd 很小,可认为?='∠90111B B A ,故所求摩擦衬片的变形应为γγγδd B A B B C B 111111111sin sin ='==考虑到1OA ≈R OB =1,那么分析等腰三角形11OB A ,则有γαsin sin 11RB A =,所以表面的径向变形和压力为==αγαδsin sin max 11p p d R (8-2)综上所述可知,新蹄片压力沿摩擦衬片长度的分布符合正弦曲线规律,可用式(8-1)和式(8-2)计算。
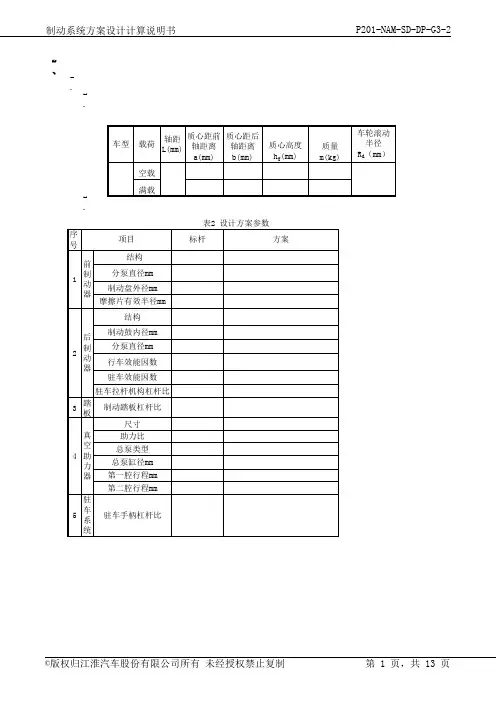
目录1 系统概述 (1)1.1 系统设计说明 (1)1.2 系统结构及组成 (1)1.3 系统设计原理及规范 (2)2 输入条件 (2)2.1 整车基本参数 (2)2.2 制动器参数 (3)2.3 制动踏板及传动装置参数 (3)2.4 驻车手柄参数 (4)3 系统计算及验证 (4)3.1 理想制动力分配与实际制动力分配 (4)3.2 附着系数、制动强度及附着系数利用率 (7)3.3 管路压强计算 (9)3.4 制动效能计算 (11)3.5 制动踏板及传动装置校核 (14)3.6 驻车制动计算 (17)3.7 衬片磨损特性计算 (19)4 总结 (19)5 制动踏板与地毯距离 (21)参考文献 (21)1 系统概述1.1 系统设计说明只有制动性能良好、制动系统工作可靠的汽车才能充分发挥其动力性能。
因此,在整车新产品开发设计中制动系统的匹配计算尤为重要。
LF7133是在标杆车的基础上设计开发的一款全新车型,其制动系统是在标杆车制动系统为依托的前提下进行设计开发。
根据项目要求,需要对制动系统各参数进行计算与校核,以确保制动系统的正常使用,使系统中各零部件之间参数匹配合理,并且确保其满足国家相关法律法规的要求。
1.2 系统结构及组成经双方确认的设计依据和要求,LF7133制动系统采用同国内外大量A级三厢轿车一致的液压制动系统。
制动系统包含以下装置:行车制动系统:根据车辆配置选择前后盘式或前盘后鼓制动器,制动踏板为吊挂式踏板,带真空助力器,管路布置采用相互独立的X型双管路系统;驻车制动系统:为机械式手动后鼓式制动,采用远距离棘轮拉索操纵机构;应急制动系统:行车制动系统具有应急特性,应保证在行车制动只有一处管路失效的情况下,满足应急制动性能要求。
LF7133制动系统主要由如下部件组成。
结构简图如图1所示:图1 制动系统结构简图1. 真空助力器带制动主缸总成2.制动踏板3.车轮4.轮速传感器5. 制动管路6. 制动轮缸7.ABS控制器1.3 系统设计原理及规范本计算报告根据总布置提供的整车参数、制动器与总泵及真空助力器厂家提供的数据、制动踏板、驻车操纵机构选型进行匹配计算,校核前/后制动力、制动效能、制动踏板力、驻车制动手柄力及驻坡极限倾角等,用以验证制动系统设计的合理性。
球盘式IPB卡钳驻车效率的计算方法作者:易刚裴纯辉来源:《工业设计》2016年第06期摘要:为校核球盘式IPB卡钳驻车制动能力,叙述了球盘式IPB卡钳的工作原理,提出卡钳驻车效率(力的放大比及拉臂行程)的计算方法,通过与台架驻车效率性能结果对比,验证了计算方法的正确性,该方法适用于开发前期球盘式IPB卡钳驻车制动效率的校核计算。
关键词:球盘式;IPB卡钳;驻车效率;放大比;行程;计算方法;试验验证目前乘用车后轮制动器广泛应用盘式制动器,而球盘式IPB行驻一体式卡钳由于驻车效率高而获得了更为广阔的运用,该球盘式IPB行驻一体式卡钳通过集成在卡钳内的特殊驻车机构将驻车输入杆的旋转运动转化为活塞(或球盘)的直线运动,从而推动摩擦片夹紧制动盘实现驻车。
但是国内卡钳厂家由于技术能力限制,对驻车效率(放大比和拉索行程)的校核还无成熟经验或公开文献参考,本文提供一种球盘式IPB卡钳驻车效率的计算方法,并通过与台架试验验证进行对比,论述了该计算方法的准确性。
1 工作原理如上图1所示,手刹带动拉臂旋转,拉臂旋转时带动驻车输入杆旋转,挤压钢球,钢球开始爬坡,并挤压球盘实现直线运动,带动活塞挤压摩擦片夹紧制动盘而从实现驻车。
2 驻车效率计算如下图2所示:O为拉臂旋转中心,A为拉臂初始位置,B为拉臂转动△X角度后的位置,Df为球窝底部圆弧直径,Rb为球窝分度圆半径(一般为9mm),r为钢球半径,α为爬升角(各制动器厂家根据自身能力设计会稍有不同,一般为13°至16°之间),R为拉臂长度,Re为拉臂的旋转力臂,Re’为拉臂旋转△X角度后的旋转力臂,初始角度为β,A为旋转中心与拉索固定点之间的距离,B为拉臂初始位置与拉索固定点之间的距离,B’为拉臂转动△X角度后的位置与拉索固定点之间的距离,初始A点时施加在拉臂上的输入力为F1,此时活塞夹紧摩擦片的输出力为F2,此时对应的放大比为I,拉臂转动△X角度后(即B点)施加在拉臂上的输入力为F1’,此时活塞夹紧摩擦片的输出力为F2’,此时对应的放大比为I’,对应的拉索行程为△L。
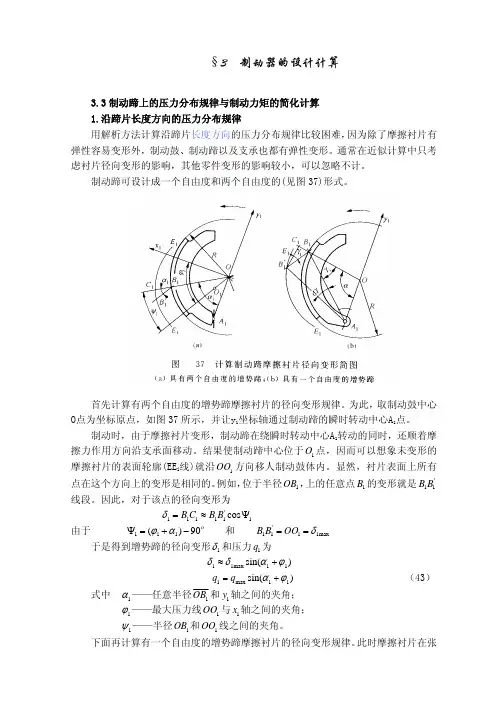
§3 制动器的设计计算3.3制动蹄上的压力分布规律与制动力矩的简化计算1.沿蹄片长度方向的压力分布规律用解析方法计算沿蹄片长度方向的压力分布规律比较困难,因为除了摩擦衬片有弹性容易变形外,制动鼓、制动蹄以及支承也都有弹性变形。
通常在近似计算中只考虑衬片径向变形的影响,其他零件变形的影响较小,可以忽略不计。
制动蹄可设计成一个自由度和两个自由度的(见图37)形式。
首先计算有两个自由度的增势蹄摩擦衬片的径向变形规律。
为此,取制动鼓中心O点为坐标原点,如图37所示,并让y 1坐标轴通过制动蹄的瞬时转动中心A 1点。
制动时,由于摩擦衬片变形,制动蹄在绕瞬时转动中心A 1转动的同时,还顺着摩擦力作用方向沿支承面移动。
结果使制动蹄中心位于点,因而可以想象未变形的摩擦衬片的表面轮廓(EE 1O l 线)就沿方向移人制动鼓体内。
显然,衬片表面上所有点在这个方向上的变形是相同的。
例如,位于半径,上的任意点的变形就是线段。
因此,对于该点的径向变形为1OO 1OB 1B '11B B 1'11111cos Ψ≈=B B C B δ由于 和ο90)(111−+=Ψαϕmax 11'11δ==OO B B 于是得到增势蹄的径向变形1δ和压力为1q )sin(11max 11ϕαδδ+≈)sin(11max 1ϕα+=q q (43)式中 1α——任意半径1OB 和轴之间的夹角;1y 1ϕ——最大压力线与轴之间的夹角;1OO 1x 1ψ——半径和线之间的夹角。
1OB 1OO 下面再计算有一个自由度的增势蹄摩擦衬片的径向变形规律。
此时摩擦衬片在张开力和摩擦力的作用下,绕支承销中心A 1转动γd 角(见图37(b))。
摩擦衬片表面任意点沿制动蹄转动的切线方向的变形即为线段,其径向变形分量是线段,在半径延长线上的投影,即线段。
由于1B '11B B '11B B 1OB 1BB γd 角很小,可以认为,则所求的摩擦衬片径向变形为°=∠90'111B B Aγγγδd B A B B C B ⋅===sin sin 11'11111 考虑到,则由等腰三角形可知R OB OA =≈1111OB A γαsin /sin /11R B A = 代入上式,得摩擦衬片的径向变形和压力分别为γαδd R sin 1=αsin max 11q q = (44)综合上述可以认为:对于尚未磨合的新制动蹄衬片,沿其长度方向的压力分布符合正弦曲线规律,可用式(43)和式(44)计算。
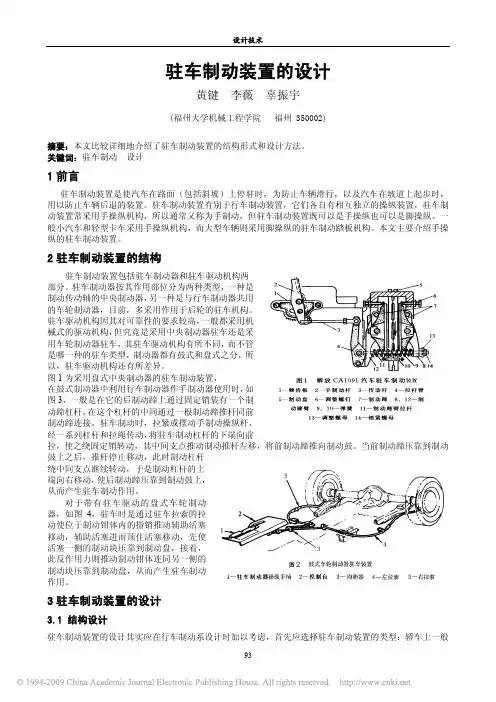
驻车制动装置的设计黄键李薇辜振宇(福州大学机械工程学院 福州 350002)摘要:本文比较详细地介绍了驻车制动装置的结构形式和设计方法。
关键词:驻车制动设计1前言驻车制动装置是使汽车在路面(包括斜坡)上停驻时,为防止车辆滑行,以及汽车在坡道上起步时,用以防止车辆后退的装置。
驻车制动装置有别于行车制动装置,它们各自有相互独立的操纵装置,驻车制动装置常采用手操纵机构,所以通常又称为手制动,但驻车制动装置既可以是手操纵也可以是脚操纵。
一般小汽车和轻型卡车采用手操纵机构,而大型车辆则采用脚操纵的驻车制动踏板机构。
本文主要介绍手操纵的驻车制动装置。
2驻车制动装置的结构驻车制动装置包括驻车制动器和驻车驱动机构两部分。
驻车制动器按其作用部位分为两种类型,一种是制动传动轴的中央制动器,另一种是与行车制动器共用的车轮制动器,目前,多采用作用于后轮的驻车机构。
驻车驱动机构因其对可靠性的要求较高,一般都采用机械式的驱动机构,但究竟是采用中央制动器驻车还是采用车轮制动器驻车,其驻车驱动机构有所不同,而不管是哪一种的驻车类型,制动器都有鼓式和盘式之分,所以,驻车驱动机构还有所差异。
图1为采用盘式中央制动器的驻车制动装置,在鼓式制动器中利用行车制动器作手制动器使用时,如图3,一般是在它的后制动蹄上通过固定销装有一个制动蹄杠杆,在这个杠杆的中间通过一根制动蹄推杆同前制动蹄连接。
驻车制动时,拉紧或摆动手制动操纵杆,经一系列杠杆和拉绳传动,将驻车制动杠杆的下端向前拉,使之绕固定销转动,其中间支点推动制动推杆左移,将前制动蹄推向制动鼓。
当前制动蹄压靠到制动鼓上之后,推杆停止移动,此时制动杠杆绕中间支点继续转动,于是制动杠杆的上端向右移动,使后制动蹄压靠到制动鼓上,从而产生驻车制动作用。
对于带有驻车驱动的盘式车轮制动器,如图4,驻车时是通过驻车拉索的拉动使位于制动钳体内的指销推动辅助活塞移动,辅助活塞进而顶住活塞移动,先使活塞一侧的制动块压靠到制动盘,接着,此反作用力则推动制动钳体连同另一侧的制动块压靠到制动盘,从而产生驻车制动作用。
制动器的设计计算部分制动器是用来控制或减速机械设备运动的装置。
它通常由摩擦垫、压力单元、驱动装置和控制装置组成。
制动器的设计计算部分包括静态设计与动态设计两个方面。
静态设计主要涉及计算所需的制动力和摩擦垫的尺寸,而动态设计则涉及制动器在运行期间的热量分布和冷却。
在进行静态设计计算之前,首先需要确定制动器所需的制动力。
制动器的制动力通常由下述式子计算:制动力=需要减速度×机械设备的质量其中,需要减速度是由系统要求或运行条件决定的。
机械设备的质量可以通过实际测量或通过计算机辅助设计软件进行估算。
此外,制动器还需要考虑一些额外的因素,如摩擦系数和安全系数,以确保制动器的可靠性和安全性。
在确定制动力后,需要计算摩擦垫的尺寸。
摩擦垫的尺寸取决于制动器的类型和具体应用。
常见的制动器类型包括盘式制动器和鼓式制动器。
对于盘式制动器,摩擦垫通常由摩擦面的直径和宽度来确定。
对于鼓式制动器,摩擦垫的尺寸通常由鼓面的直径和摩擦面的长度来决定。
与摩擦垫尺寸相关的参数还包括摩擦垫的摩擦系数和最大摩擦温度。
摩擦系数表示摩擦垫在制动时的摩擦性能,其数值通常由摩擦材料的选择决定。
最大摩擦温度是指制动器在运行期间可能达到的最高温度,该温度主要取决于摩擦材料和运行工况。
在动态设计方面,制动器的热量分布和冷却是设计中的重要考虑因素。
当制动器运行一段时间后,摩擦垫会产生大量热量,如果不能及时散热,可能会导致制动性能下降、摩擦垫老化或甚至引发火灾。
因此,制动器的设计需要考虑散热系统,以保持摩擦垫的正常工作温度。
散热系统通常包括散热片或散热鳍片,以增加散热面积,帮助热量的有效传递。
此外,制动器还可以采用风冷式冷却系统,通过引入外部冷气来加速热量的散发。
冷却系统的设计需要考虑风量、风速和冷却材料的选择等因素。
综上所述,制动器的设计计算部分涉及静态设计和动态设计两个方面。
静态设计主要包括计算制动力和摩擦垫尺寸,而动态设计则涉及制动器的热量分布和冷却。
制动计算公式范文制动计算是在机械设计、交通运输等领域中非常重要的计算问题,它涉及到制动系统的设计和性能评估。
制动计算公式是指用来计算制动系统相关参数的数学公式,通常包括制动力、制动距离、制动时间等参数的计算方法。
下面将介绍一些常见的制动计算公式和其应用。
1.制动力计算公式在机械设计中,制动力是制动系统所能提供的制动力量,通常用来衡量制动系统的性能。
制动力的计算公式如下:F=μN其中,F为制动力(N),μ为摩擦系数(无量纲),N为受制动物体施加的正向力(N)。
摩擦系数μ是一个反映摩擦特性的物理量,它与接触材料的性质、表面粗糙度和接触状态等有关。
一般来说,摩擦系数越大,制动力就越大。
2.制动距离计算公式制动距离是车辆在制动过程中行驶的距离,用来评估车辆的制动性能。
制动距离的计算公式如下:d=V^2/(2μg)其中,d为制动距离(m),V为车辆的初始速度(m/s),μ为摩擦系数(无量纲),g为重力加速度(9.81m/s^2)。
通过这个公式可以看出,制动距离与初始速度的平方成正比,与摩擦系数和重力加速度成反比。
因此,在设计制动系统时,需要注意车辆的初始速度和摩擦系数的选择,以减小制动距离。
3.制动时间计算公式制动时间是车辆在进行急刹车时,从刹车踏板被踩下到车辆完全停止的时间。
制动时间的计算公式如下:t=V/a其中,t为制动时间(s),V为车辆的初始速度(m/s),a为减速度(m/s^2)。
减速度a是车辆在进行制动时的减速度,通常是制动系统所能提供的最大减速度。
制动时间与初始速度成正比,与减速度成反比。
因此,在设计制动系统时,需要选择适当的减速度,以保证车辆在合理的时间内完成制动。
4.制动功率计算公式制动功率是指制动系统所需消耗的功率,用来评估制动系统的能耗。
制动功率的计算公式如下:P=FV其中,P为制动功率(W),F为制动力(N),V为车辆的速度(m/s)。
制动功率与制动力和速度成正比。
在选择制动系统时,需要考虑制动功率的大小,以保证系统能够提供足够的制动力。
汽车制动系统计算汽车制动系统是汽车安全性能的重要组成部分,其作用是将动能转化为热能,从而实现汽车减速或停止的功能。
制动系统的设计要求一方面要有足够的制动力,能够确保在各种路况下车辆能够及时有效地停止或减速;另一方面,还要保证驾驶员操控制动系统的舒适性,即制动过程的稳定性和可靠性。
常见的汽车制动系统包括机械制动系统和液压制动系统。
机械制动系统主要包括手刹和鼓刹,其结构简单、可靠性高,但制动力较小,适用于较小的车辆。
液压制动系统则采用助力作用和受力均衡原理,使制动效果更理想。
液压制动系统主要由制动踏板、主缸、助力器、制动盘或制动鼓、制动片或制动鞋等组成。
制动系统的计算主要是针对制动力和制动距离进行的。
制动力计算是为了确保制动系统能够提供足够的制动力,使车辆能够在规定的路况下减速或停止。
制动力计算涉及到多个因素,包括车辆的质量、制动系数、路面状况等。
车辆的质量是制动力计算的前提条件,其决定了车辆在制动过程中需要消耗多少能量才能停止。
制动系数是制动力计算的核心,它是指制动器与车轮接触面之间的摩擦力与垂直加速度之比。
制动系数的大小受到多个因素的影响,包括制动器与车轮间的垂直压力、制动面积、制动器与车轮的摩擦系数等。
路面状况也会对制动系数的大小产生影响,例如湿滑路面时制动系数会明显降低。
制动距离计算是为了评估制动系统的性能,即车辆在制动过程中需要多长的距离才能停止。
制动距离的计算同样涉及到车辆的质量、制动系数、道路状况等因素。
制动距离的计算可以根据牛顿第二定律和运动学公式来进行,其中制动时间、制动段速度和制动段长度等参数需要进行实际测量或估算。
为了确保汽车制动系统的安全性和可靠性,制动力和制动距离的计算结果可以作为制动系统设计和制造的依据。
制动力应该保证在各种路况下都能够满足要求,并且具有一定的安全余量。
制动距离的计算结果可以与制动距离标准进行比较,以评估制动系统的性能是否合格。
总之,汽车制动系统的计算是保证汽车行驶安全的重要环节。
汽车制动距离计算公式
汽车制动距离计算公式可以写作:
制动距离 = 初速度×制动时间+0.5×制动时间²×制动加速度其中,初速度指汽车制动前的速度,制动时间指从踩下刹车到车辆完全停止的时间,制动加速度指制动系统的最大减速度。
这个公式的物理意义是,汽车在制动过程中需要产生一定的负加速度来减速停车,而制动距离是汽车在该过程中行驶的距离。
初速度越大,加速度越大,制动时间越短,制动距离就越大。
需要注意的是,这个公式仅仅是一个理论值,实际情况还要考虑道路条件、车辆重量、制动系统的状态等因素,所以实际制动距离可能会有所不同。
同时,为了安全起见,驾驶员应该尽可能保持安全车距,避免紧急制动情况的发生。
整车制动力计算范文在整车制动力的计算中,首先需要了解制动力的定义和计算方法。
制动力是指制动器对车辆运动的抑制力,它是由车辆质量、制动系数和车速共同决定的。
通常情况下,制动力应大于或等于车辆的前进力或下坡行驶力,以确保车辆能够准确停车或减速。
计算整车制动力的基本公式为:Fb=m×g×μ其中,Fb是整车制动力,m是车辆总质量,g是重力加速度,μ是制动系数。
重力加速度通常取9.8m/s^2车辆总质量包括整车重量与负载物质量的总和。
整车重量是指车辆自身的重量,包括车身、发动机、底盘和其他装置的质量。
负载物质量是指车辆所携带的乘客和货物的总质量。
制动系数是指车辆制动器与制动轮胎之间的摩擦系数。
它反映了制动效果的好坏,一般根据道路状况和制动器与轮胎的磨损程度来选择。
在实际计算中,首先需要确定车辆总质量,这可以通过称重或查找车辆相关资料来获得。
然后,确定制动系数。
制动系数的选择要根据路面情况和实际制动器的磨损程度,一般常用的制动系数为0.7-0.9之间。
最后,将车辆总质量、重力加速度和制动系数代入公式,即可计算出整车制动力。
需要注意的是,计算出来的整车制动力是理论值,实际制动效果还受到其他因素的影响,如路面摩擦系数、制动器的工作状态和车辆的空气动力学性能等。
在实际应用中,需要综合考虑这些因素,进行合理的调整和设计。
总结起来,整车制动力的计算是通过车辆总质量、重力加速度和制动系数来确定的。
它是确保车辆准确停车或减速的基础,对于车辆的安全性和稳定性具有重要的意义。
在实际应用中,需要综合考虑各种因素,进行合理的计算和设计。
汽车制动器设计计算步骤1.文中的一些命名方式以及符号可能不是很适应你们的习惯,希望能根据你们的习惯用红色字体进行修改。
2.鉴于口头形式或许会遗漏很多细节,所以将汽车制动器计算部分进行了一个归纳,里面有些处理的方法不是很清楚,希望能进一步进行文本上的完善。
3.有些参数是不是有常用的默认值,或者是取值范围,请在参数名称的后面表明。
4.其他错误也望能一同更正5.由于上个星期忙于期末汇报没能及时提交这份总结望见谅1.车型部分:输入:车满载质量:M max(Kg)车空载质量:M min(Kg)初速度:V0(Km/h)刹车距离:S0(m)轴距:L(m)前轮轴距:L1(m)后轮轴距:L2(m)满载质心高:Hg1(m)空载质心高::Hg2(m)前/后轮滚动半径:Rg(m)地面附着力系数:u轮辋规格:(内径和深度)(mm)输出:最大减速度:a max=g*u(m/s2)必要减速度:a mu=V02/(2*S0)(m/s2)制动盘的最大直径D max: (mm)(受轮辋内部空间限制,包括内径和深度)前轮分配比:dt1=(L2+a max*Hg1/g)/L满载时的情况:(按地面能够提供的最大减速度计算)后轮分配比:dt2=(L1-a max*Hg1/g)/L地面总制动力矩:M=a max*g*u*Rg(N.m)前轮所需制动力矩:M1=M*dt1后轮所需制动力矩:M2=M*dt2空载时的情况: (按地面能够提供的最大减速度计算)前轮分配比:dt1、=(L2+a max*Hg2/g)/L后轮分配比:dt2、=(L1-a max*Hg2/g)/L地面总制动力矩:M、= M min *g*u*R g(N·m)前轮所需制动力矩:M1、=M*dt1、(N·m)后轮所需制动力矩:M2、=M*dt2、(N·m)约束1:A mu<A max满足:继续设计不满足:怎么处理?(车型设计的减速度是由法律规定的,设计车型时,应该是由法律规定的减速度,确定车辆的初速以及停车距离,不可能会出现设定的减速度大于地面能够提供的最大减速度,如果出现这种可能,只能是车型设计有问题。
前轮EPB制动钳总成设计计算摘要:本文主要是以前轮EPB作为研究对象,对前轮EPB制动钳总成所起到应急制动进行校核、计算,对比前后轮EPB制动钳总成制动减速度的差异性。
关键词:前轮EPB制动钳总成;减速度1、引言近年来,电子驻车制动器(EPB,Electrical Park Brake)由于其在实际应用中的便捷性与舒适性,越来越多的取代了传统的机械集成式驻车制动器与盘中鼓式制动器。
电子驻车制动器一般包含电动执行机构单元与驻车制动钳两大基础构件。
在现有技术中,由于EPB布置在后轴上;在应急制动时,同等条件下EPB提供的制动力,提供的减速度小。
通过对比前后轮EPB制动钳总成对整车制动减速度的计算,分析前轮EPB和后轮EPB的性能优劣,从而影响汽车行驶的安全性。
2、前轮EPB制动钳总成构成及工作原理2.1 前轮EPB制动钳总成构成图1编号说明:1 钳体;2 钳架;3 外摩擦片;4 内摩擦片;5 活塞;6 矩形密封圈;7 螺杆螺套;8 执行器;9 电机;10齿轮传动组;11制动盘;12导销;2.2 前轮EPB制动钳总成工作原理前轮EPB制动钳总成由执行器和钳体钳架总成两部分组成,其中执行器主要是为了提供驱动动力源、实现减速增扭之目的;而钳体钳架总成则将电机经减速机构传递过来的旋转运动转化为直线运动,从而推动活塞前进夹紧制动盘实现驻车功能。
2.2.1、行车制动:制动时,高压制动液从钳体1进油口进入,推动活塞5伸出,活塞推动内摩擦片4贴紧制动盘11,同时活塞5向前移动带动矩形密封圈6发生弹性变形。
制动钳体受液压反作用力沿导销12浮动,拉动外摩擦片3贴紧制动盘,形成内外摩擦片3,4对制动盘11的夹紧力,摩擦片与制动盘摩擦实现车辆减速制动;释放制动时,发生变形的矩形密封圈6在弹性回复力作用下回位,带动活塞5回位。
内外摩擦片在制动盘旋转的过程中被打回,摩擦片与制动盘分离制动解除。
2.2.2、驻车制动(可作为应急制动使用)驻车制动时,电机9转动,齿轮传动组10将电机9输出的旋转运动减速增扭,带动螺杆转动。
219
式中ϕ——该车所能遇到的最大附着系数;
q——制动强度
e r ——车轮有效半径。
一个车轮制动器应有的最大制动力矩为按上列公式计算结果的半值。
奥龙、德御系列车采用的是斯太尔前轴、后桥,制动器采用的是斯太尔领从蹄鼓式制动器,如图13.5所示,制动器的规格为前φ420×160/后φ420×185,制动器结构参数及制动力矩见表13.1、表13.2,由于奥龙、德御车制动系统中没有安装气压感载调节阀,所以整车制动力不可调节,对同一系列车,整车制动力分配系数为定值,所以,实际制动力分配曲线与理想的制动力分配曲线相差较大,制动效率较低,前轮可能因抱死而丧失转向能力,后轮也可能抱死使汽车有发生后轴侧滑的危险。
图13.5 领从蹄鼓式制动器结构示意图
因此,对奥龙、德御系列车来说,可以通过调整轴荷分配来调整重心位置,使车辆满载情况下的同步附着系数接近可能遇到的路面附着系数,才能获得稳定的制动工况。
表13.1 斯太尔前、后制动器结构参数
表13.2 斯太尔前、后制动器在各种制动气压下的制动力矩
4.驻车计算
图13.6为汽车在上坡路上停驻时的受力情况,由此可得出汽车上坡停驻时的后轴车轮的附着力为:
结构参数 STEYR (前) STEYR (后) L(mm) 155mm 155mm a(mm) 160mm 160mm M(mm) 38mm 38mm 摩擦片包角0β 95° 110° 摩擦片起始角 29°8′ 21°39′ 制动臂长l(mm) 122 145 摩擦片宽b(mm) 160 185 制动鼓半径(mm) 210 210 ()a MP P 0 0.5 0.6 0.7 0.8 m N M u ⋅ٛ/)(1前 10811 12974 15135 17299 m N M u ⋅ٛ/)(2后
13573 16287 19002 21717
220
图13.6 汽车在上坡路上停驻时的受力简图
)sin cos (12ααϕϕg a h L L
g m Z +=
同样可求出汽车下坡停驻时的后轴车轮的附着力为:
)sin cos (12ααϕϕg a h L L
g m Z −=′ 根据后轴车轮附着力与制动力相等的条件可求得汽车在上坡路和下坡路上停驻时的坡度极限倾角α,α′,即由
αααϕsin )sin cos (1g m h L L
g m a g a =+ 求得汽车在上坡时可能停驻的极限上坡路倾角为:
g h L L ϕϕα−=1arctan 汽车在下坡时可能停驻的极限下坡路倾角为:
g
h L L ϕϕα+=′1arctan GB7258-2004《机动车运行安全技术条件》中第7.13.3条要求, 在空载状态下,驻车制动装置应能保证机动车在坡度为 20%(对总质量为整备质量的 1.2 倍以下的机动车为 15%)、轮胎与路面间的附着系数不小于 0.7 的坡道上正、反两个方向保持固定不动,其时间不应少于 5 min 。
对于允许挂接挂车的汽车,其驻车制动装置必须能使汽车列车在满载状态下时能停在坡度为 12% 的坡道(坡道上轮胎与路面间的附着系数不应小于 0.7)上。
为了使汽车能在接近于由上式确定的坡度为α的坡路上停驻,则应使后轴上的驻车制动力矩接近于由α所确定的极限值αsin e a gr m (因αα′>),并保证在下坡路上能停驻的坡度不小于法规规定值。
单个后轮驻车制动器的制动上限为αsin 2
1e a gr m ;中央驻车制动器的制动力矩上限为0/sin i gr m e a α,0i 为后驱动桥主减速比。
13.3.3 制动驱动机构的结构型式选择
1.制动驱动机构的结构型式选择
根据制动力源的不同,制动驱动机构可分为简单制动、动力制动和伺服制动三大类,重型汽车一般均采用动力制动系。
气压制动系是动力制动系最常见的型式,由于可获得较大的制动驱动力且主车与被拖的挂车以及汽车列车之间制动驱动系统的联接装置结构简单、联接和断开都很方便,因此广泛用于总质量为8t 以上尤其是15t
以上的载货汽车、越野汽车和客车上。
但气
221 压制动系必须采用空气压缩机、储气筒、制动阀等装置,使结构复杂、笨重、轮廓尺寸大、造价高;管路中气压的产生和撤除均较慢,作用滞后时间较长(0.3~0.9s),因此在制动阀到制动气室和储气筒的距离较远时有必要加设气动的第二级控制元件——继动阀(即加速阀)以及快放阀;管路工作压力较低(一般为0.5~0.8MPa),因而制动气室的直径大,只能置于制动器之外,再通过杆件及凸轮驱动制动蹄,使非簧载质量增大;另外,制动气室排气时也有较大噪声。
图13.7为气压制动系的双回路制动系统管路示意图。
由发动机驱动的空气压缩机1将压缩空气经调压阀2进入空气干燥器3进行干燥,然后进入四回路保护阀4进行分配,储气筒6、7分别作为双回路的前、后桥制动储气装置,气压表10用于随时测量前、后回路的制动气压值,感载阀18可确保制动力随载荷的变化而变化,弹簧制动气室19起到紧急制动和驻车制动的作用,ABS 电磁阀39、40分别串联于制动阀与制动气室之间,起到了调节制动压力的作用,避免了车轮抱死,从储气筒5出来的压缩空气通过手制动阀16、继动阀20、弹簧制动气室19构成了驻车制动回路,另外还给挂车充气,从挂车制动阀17连接至挂车接头11、12的两根管路确保了挂车制动回路的双管路制动。
图13.7 气压制动系的双回路示意图
奥龙、德御、德龙系列车均沿用斯太尔制动技术,行车制动采用双回路气压制动,驻车及应急制动采用弹簧储能断气制动,辅助制动采用发动机排气制动或排气门制动(WEVB),挂车制动控制采用双管路气压制动。
2.制动系统的多回路设计
为了提高制动驱动机构的工作可靠性,保证行车安全,制动驱动机构至少应有两套独立的系统,即应将汽车的全部行车制动器气压管路分成两个或更多个相互独立的回路,以便当一个回路失效后,其他完好的回路仍能可靠地工作。
奥龙、德御、德龙系列车沿用斯太尔制动技术,制动回路采用双回路,即前、后桥采用两个相对单独的制动回路,确保了制动系统的可靠性。
13.3.4 制动系统阀类的选择
1.空气干燥器的选择
空气干燥器的作用是调整制动系统的工作气压,其切断压力就是制动系统的最大工作压力,同时它可以过滤空气中的水份、油污,并适时再生干燥剂,集成的安全阀可防止系统压力过载,集成的加热装置能避免总成冬季冻结失效,空气干燥器总成的分子筛要求每两年更换一次,以确保空气干燥器的干燥性能。
我公司有STEYR 和F3000两大技术平台,制动系统的工作压力有0.81MPa 和
1MPa。