能量回馈式可编程电子负载(能馈负载)
- 格式:pdf
- 大小:3.03 MB
- 文档页数:10
电力电子复习姓名:杨少航电力电子技术试题第1章电力电子器件1.电力电子器件一般工作在__开关__状态。
2.在通常情况下,电力电子器件功率损耗主要为__通态损耗__,而当器件开关频率较高时,功率损耗主要为__开关损耗__。
3.电力电子器件组成的系统,一般由__控制电路__、_驱动电路_、_主电路_三部分组成,由于电路中存在电压和电流的过冲,往往需添加_保护电路__。
4.按内部电子和空穴两种载流子参与导电的情况,电力电子器件可分为_单极型器件_、_双极型器件_、_复合型器件_三类。
5.电力二极管的工作特性可概括为_承受正向电压导通,承受反相电压截止_。
6.电力二极管的主要类型有_普通二极管_、_快恢复二极管_、_肖特基二极管_。
7.肖特基二极管的开关损耗_小于_快恢复二极管的开关损耗。
8.晶闸管的基本工作特性可概括为__正向电压门极有触发则导通、反向电压则截止__。
9.对同一晶闸管,维持电流IH与擎住电流I L在数值大小上有I L__大于__IH。
10.晶闸管断态不重复电压UDSM与转折电压Ubo数值大小上应为,UDSM_大于__Ubo。
11.逆导晶闸管是将_二极管_与晶闸管_反并联_(如何连接)在同一管芯上的功率集成器件。
12.GTO的__多元集成__结构是为了便于实现门极控制关断而设计的。
13.MOSFET的漏极伏安特性中的三个区域与GTR共发射极接法时的输出特性中的三个区域有对应关系,其中前者的截止区对应后者的_截止区_、前者的饱和区对应后者的__放大区__、前者的非饱和区对应后者的_饱和区__。
14.电力MOSFET的通态电阻具有__正__温度系数。
15.IGBT 的开启电压UGE(th)随温度升高而_略有下降__,开关速度__小于__电力MOSFET 。
16.按照驱动电路加在电力电子器件控制端和公共端之间的性质,可将电力电子器件分为_电压驱动型_和_电流驱动型_两类。
17.IGBT的通态压降在1/2或1/3额定电流以下区段具有__负___温度系数,在1/2或1/3额定电流以上区段具有__正___温度系数。
配电自动化馈线终端(FTU)技术规范目录1 规范性引用文件 (1)2 技术要求 (1)3 标准技术参数 (10)4 环境条件表 (12)5 试验 (13)附录A馈线终端无线通信安装位置、航插尺寸定义(参考性附录) (14)附录B 馈线终端接口定义(规范性附录) (28)配电自动化馈线终端(FTU)技术规范1 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本适用于本文件。
GB/T 17626.1 电磁兼容试验和测量技术抗扰度试验总论GB/T 17626.2 静电放电抗扰度试验GB/T 17626.3 射频电磁场辐射抗扰度试验GB/T 17626.4 浪涌(冲击)抗扰度试验GB/T 17626.5 电快速瞬变脉冲群抗扰度试验GB/T 17626.8 工频磁场的抗扰度试验GB/T 17626.10 阻尼振荡磁场的抗扰度试验GB/T 17626.11 电压暂降、短时中断和电压变化抗扰度试验GB/T 15153.1 远动设备及系统第2部分:工作条件第1篇:电源和电磁兼容兼容性GB/T 11022 高压开关设备和控制设备标准的共用技术要求GB/T 14285 继电保护和安全自动装置技术规程GB/T 4208 外壳防护等级(IP)GB/T 13729 远动终端设备GB/T 5096 电子设备用机电件基本试验规程及测量方法GB/T 19520 电子设备机械结构GB 7251.5 低压成套开关设备和控制设备第五部分:对户外公共场所的成套设备—动力配电网用电缆分线箱(CDCs)的特殊要求DL/T 637-1997 阀控式密封铅酸蓄电池订货技术条件DL/T 721 配电网自动化系统远方终端DL/T 634.5101 远动设备及系统第5-101部分:传输规约基本远动任务配套标准DL/T 634.5104 远动设备及系统第5-104部分:传输规约采用标准传输协议子集的IEC60870-5-101网络访问DL/T 814 配电自动化系统功能规范Q/GDW 382 配电自动化技术导则Q/GDW 513 配电自动化主站系统功能规范Q/GDW 514 配电自动化终端/子站功能规范Q/GDW 625 配电自动化建设与改造标准化设计技术规定2技术要求2.1概述馈线终端的结构形式可分为箱式馈线终端和罩式馈线终端。

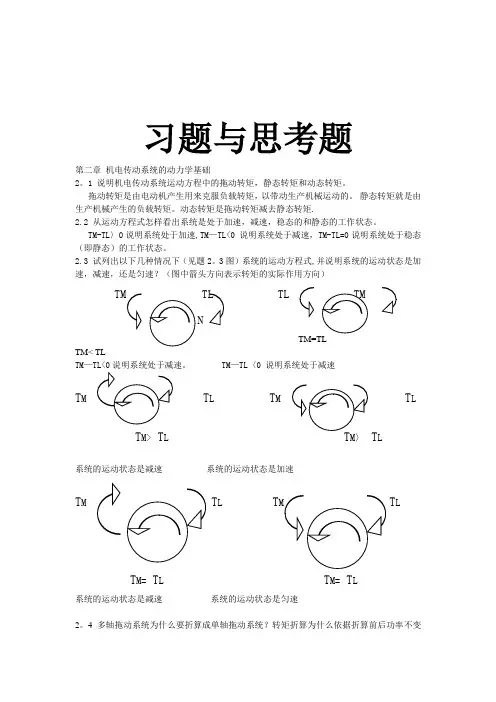
习题与思考题第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩.答:拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态.T M-T L〉0说明系统处于加速,T M—T L〈0 说明系统处于减速,T M—T L=0说明系统处于稳态(即静态)的工作状态.2。
4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?答:因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=T ω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5J ω22。
9 一般生产机械按其运动受阻力的性质来分可有哪几种类型的负载?答:可分为1恒转矩型机械特性2离心式通风机型机械特性3直线型机械特性4恒功率型机械特性,4种类型的负载。
2。
10反抗静态转矩与位能静态转矩有何区别,各有什么特点?答:反抗转矩的方向与运动方向相反,,方向发生改变时,负载转矩的方向也会随着改变,因而他总是阻碍运动的。
位能转矩的作用方向恒定,与运动方向无关,它在某方向阻碍运动,而在相反方向便促使运动。
第三章3。
3 一台他励直流电动机所拖动的负载转矩T L=常数,当电枢电压附加电阻改变时,能否改变其运行其运行状态下电枢电流的大小?为什么?这是拖动系统中那些要发生变化?T=K tφI a u=E+I a R a当电枢电压或电枢附加电阻改变时,电枢电流大小不变。
转速n与电动机的电动势都发生改变.3。
习题与思考题第二章机电传动系统的动力学基础2。
1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
答:拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态.T M—T L>0说明系统处于加速,T M-T L<0 说明系统处于减速,T M —T L=0说明系统处于稳态(即静态)的工作状态。
2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?答:因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置.所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=T ω,p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.9 一般生产机械按其运动受阻力的性质来分可有哪几种类型的负载?答:可分为1恒转矩型机械特性2离心式通风机型机械特性3直线型机械特性4恒功率型机械特性,4种类型的负载。
2.10反抗静态转矩与位能静态转矩有何区别,各有什么特点?答:反抗转矩的方向与运动方向相反,,方向发生改变时,负载转矩的方向也会随着改变,因而他总是阻碍运动的.位能转矩的作用方向恒定,与运动方向无关,它在某方向阻碍运动,而在相反方向便促使运动。
第三章3.3 一台他励直流电动机所拖动的负载转矩T L=常数,当电枢电压附加电阻改变时,能否改变其运行其运行状态下电枢电流的大小?为什么?这是拖动系统中那些要发生变化?T=K tφI a u=E+I a R a当电枢电压或电枢附加电阻改变时,电枢电流大小不变.转速n与电动机的电动势都发生改变。
电机电器智能化基础知识单选题100道及答案解析1. 电机电器智能化的核心技术不包括()A. 传感器技术B. 人工智能算法C. 机械制造工艺D. 通信技术答案:C解析:电机电器智能化的核心技术通常包括传感器技术用于监测和采集数据、人工智能算法用于分析和处理数据、通信技术用于数据传输和交互,而机械制造工艺并非其核心技术。
2. 以下哪种传感器常用于电机的转速测量?()A. 温度传感器B. 压力传感器C. 光电编码器D. 湿度传感器答案:C解析:光电编码器能够精确测量电机的转速。
3. 智能电机控制系统中,用于实现精确位置控制的是()A. 速度控制环B. 电流控制环C. 位置控制环D. 电压控制环答案:C解析:位置控制环负责实现电机的精确位置控制。
4. 电机电器智能化中,采用的先进控制算法不包括()A. 模糊控制B. 比例积分控制C. 神经网络控制D. 遗传算法答案:B解析:比例积分控制是传统控制算法,而模糊控制、神经网络控制、遗传算法属于先进的控制算法。
5. 以下哪种通信协议常用于电机电器的智能化控制?()A. CAN 总线B. RS232C. USBD. 蓝牙答案:A解析:CAN 总线在工业控制领域应用广泛,常用于电机电器的智能化控制。
6. 智能电器中,用于检测电流的传感器通常是()A. 霍尔传感器B. 电容传感器C. 电感传感器D. 电阻传感器答案:A解析:霍尔传感器常用于检测电流。
7. 电机智能化诊断中,通过分析电机的()可以判断电机是否存在故障。
A. 电压波形B. 电流频谱C. 电阻值D. 电容值答案:B解析:电流频谱包含了电机运行状态的信息,通过分析电流频谱可以判断电机是否存在故障。
8. 以下哪种技术可提高电机的效率?()A. 优化电机结构B. 增加电机匝数C. 提高电机电压D. 降低电机转速答案:A解析:优化电机结构可以有效提高电机的效率。
9. 智能电器的特点不包括()A. 自诊断功能B. 手动操作C. 远程控制D. 智能化保护答案:B解析:智能电器强调自动化和智能化,手动操作不属于其特点。
1.IGBT 的开启电压UGE (th )随温度升高而略有下降,开关速度小于电力MOSFET 。
2.在如下器件:电力二极管(Power Diode )、晶闸管(SCR )、门极可关断晶闸管(GTO )、电力晶体管(GTR )、电力场效应管(电力MOSFET )、绝缘栅双极型晶体管(IGBT )中,属于不可控器件的是电力二极管,属于半控型器件的是晶闸管,属于全控型器件的是GTO GTR 电力MOSFET IGBT ;属于单极型电力电子器件的有电力MOSFET ,属于双极型器件的有电力二极管 晶闸管 GTO GTR ,属于复合型电力电子器件得有 IGBT _;在可控的器件中,容量最大的是_晶闸管_,工作频率最高的是电力MOSFET ,属于电压驱动的是电力MOSFET 、IGBT ,属于电流驱动的是晶闸管、GTO 、GTR 。
3.电阻负载的特点是_电压和电流成正比且波形相同_。
阻感负载的特点是_流过电感的电流不能突变,在单相半波可控整流带阻感负载并联续流二极管的电路中,晶闸管控制角α的最大移相范围是__0-180O _ ,其承受的最大正反向电压均为_22U __,续流二极管承受的最大反向电压为__22U _(设U 2为相电压有效值)。
4.单相桥式全控整流电路中,带纯电阻负载时,α角移相范围为0-180O ,单个晶闸管所承受的最大正向电压和反向电压分别为222U 和22U ;带阻感负载时,α角移相范围为0-90O ,单个晶闸管所承受的最大正向电压和反向电压分别为22U 和22U ;带反电动势负载时,欲使电阻上的电流不出现断续现象,可在主电路中直流输出侧串联一个平波电抗器。
5.单相全控桥反电动势负载电路中,当控制角α大于不导电角时,晶闸管的导通角=π-α-; 当控制角小于不导电角时,晶闸管的导通角= π-2。
6.电阻性负载三相半波可控整流电路中,晶闸管所承受的最大正向电压UFm 等于22U ,晶闸管控制角α的最大移相范围是0-150o ,使负载电流连续的条件为o 30≤α(U2为相电压有效值)。
电力电子技术第五版课后习题答案第二章 电力电子器件2-1 与信息电子电路中的二极管相较,电力二极管具有如何的结构特点才使得其具有耐受高压和大电流的能力?答:1.电力二极管多数采用垂直导电结构,使得硅片中通过电流的有效面积增大,显著提高了二极管的通流能力。
2.电力二极管在P 区和N 区之间多了一层低搀杂N 区,也称漂移区。
低搀杂N 区由于搀杂浓度低而接近于无搀杂的纯半导体材料即本征半导体,由于搀杂浓度低,低搀杂N 区就可以够经受很高的电压而不被击穿。
2-2. 使晶闸管导通的条件是什么?答:使晶闸管导通的条件是:晶闸管经受正向阳极电 压,并在门极施加触发电流(脉冲)。
或:uAK>0且uGK>0。
2-3. 维持晶闸管导通的条件是什么?如何才能使晶闸管由导通变成关断?答:维持晶闸 管导通的条件是使晶闸管的电流大于能维持晶闸管导通的最小电流,即维持电流。
要使晶闸管由导通变成关断, 可利用外加电压和外电路的作用使流过晶闸管的电流降 到接近于零的某一数值以下,即降到维持电流以下,即可使导通的晶闸管关断。
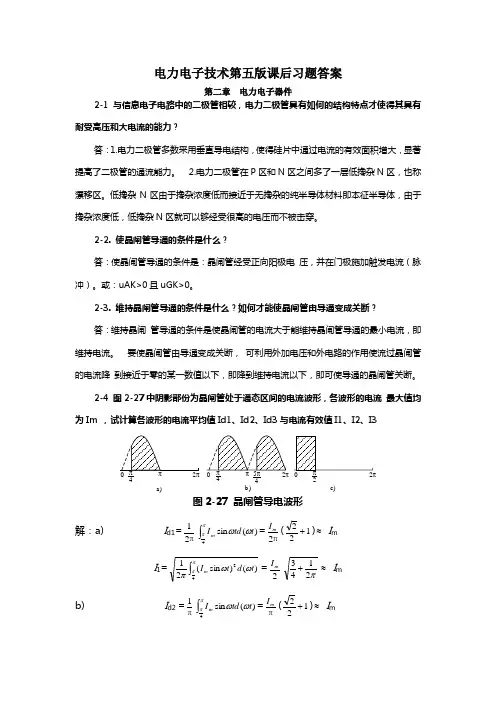
2-4 图2-27中阴影部份为晶闸管处于通态区间的电流波形,各波形的电流 最大值均为Im ,试计算各波形的电流平均值Id1、Id2、Id3与电流有效值I1、I2、I3π4π4π25π4a)b)c)图1-43图2-27 晶闸管导电波形解:a) I d1=π21⎰ππωω4)(sin t td I m=π2m I (122+)≈ I m I 1=⎰ππωωπ42)()sin (21t d t I m =2m I π2143+≈ I m b) I d2 =π1⎰ππωω4)(sin t td I m=πm I (122+)≈ I mI 2 =⎰ππωωπ42)()sin (1t d t I m=22m I π2143+≈m c) I d3=π21⎰20)(πωt d I m =41I m I 3 =⎰202)(21πωπt d I m =21I m 2-5 上题中若是不考虑安全裕量,问100A 的晶闸管能送出的平均电流I d1、I d2、I d3各为多少?这时,相应的电流最大值I m1、I m2、I m3各为多少?解:额定电流I T(AV) =100A 的晶闸管,允许的电流有效值I =157A ,由上题计算结果知a) ≈4767.0I≈, ≈ ≈ b) ≈6741.0I≈, ≈ ≈ c) I m3=2 I = 314, I d3=41I m3=2-6 GTO 和普通晶闸管同为PNPN 结构,为何GTO 能够自关断,而普通晶闸管不 能? 答:GTO 和普通晶阐管同为PNPN 结构,由P1N1P2和N1P2N2组成两个晶体管 V1、V2,别离具有共基极电流增益a1和a2,由普通晶阐管的分析可得,a1+a2=1是器件临界导通的条件。
习题与思考题第二章机电传动系统的动力学基础2。
1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩.2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL〉0说明系统处于加速,TM—TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
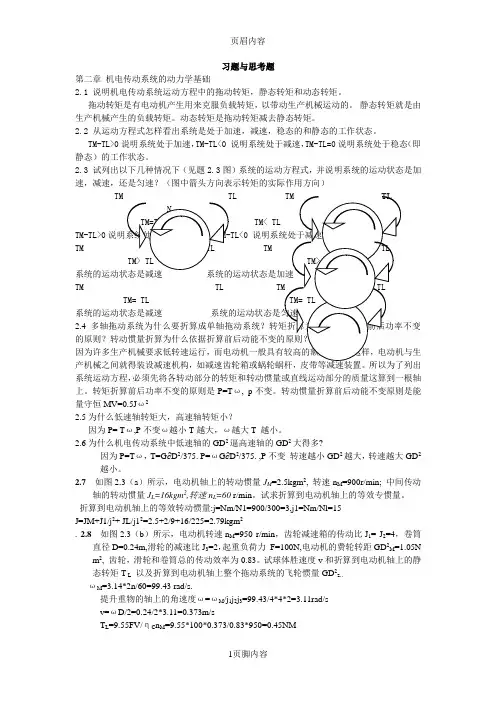
2.3 试列出以下几种情况下(见题2。
3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM=TLTM< TLTM—TL<0说明系统处于减速。
TM—TL〈0 说明系统处于减速T M T L T M T LT M> T L M〉L系统的运动状态是减速系统的运动状态是加速T M T L T T LT M= T L T M= T L系统的运动状态是减速系统的运动状态是匀速2。
4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速.这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置.所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω,p不变.转动惯量折算前后动能不变原则是能量守恒MV=0。
5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小.2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
习题与思考题第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM TL TM TLNTM=TL TM< TLTM-TL>0说明系统处于加速。
TM-TL<0 说明系统处于减速TM TL TM TLTM> TL TM> TL系统的运动状态是减速系统的运动状态是加速TM TL TM TL TM= TL TM= TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.6为什么机电传动系统中低速轴的GD2逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
欧阳科创编 2021.02.05配电自动化站所终端(DTU)技术规范目录1 规范性引用文件12 技术要求13 标准技术参数94 环境条件表135 试验14附录A 站所终端及辅助设备的结构和安装示意图(参考性附录)15附录B 站所终端端子排、航空接插件接口定义及接线要求(规范性附录)28配电自动化站所终端(DTU)技术规范1 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本适用于本文件。
GB/T 17626.1电磁兼容试验和测量技术抗扰度试验总论GB/T 17626.2静电放电抗扰度试验GB/T 17626.3射频电磁场辐射抗扰度试验GB/T 17626.4浪涌(冲击)抗扰度试验GB/T 17626.5电快速瞬变脉冲群抗扰度试验GB/T 17626.8工频磁场的抗扰度试验GB/T 17626.10阻尼振荡磁场的抗扰度试验GB/T 17626.11电压暂降、短时中断和电压变化抗扰度试验GB/T 15153.1远动设备及系统第2部分:工作条件第1篇:电源和电磁兼容兼容性GB/T 11022高压开关设备和控制设备标准的共用技术要求GB/T 14285继电保护和安全自动装置技术规程GB/T 4208外壳防护等级(IP)GB/T 13729远动终端设备GB/T 5096电子设备用机电件基本试验规程及测量方法GB/T 19520电子设备机械结构GB 7251.5低压成套开关设备和控制设备第五部分:对户外公共场所的成套设备—动力配电网用电缆分线箱(CDCs)的特殊要求DL/T 637-1997阀控式密封铅酸蓄电池订货技术条件DL/T 721配电网自动化系统远方终端DL/T 634.5101远动设备及系统第5-101部分:传输规约基本远动任务配套标准DL/T 634.5104远动设备及系统第5-104部分:传输规约采用标准传输协议子集的IEC60870-5-101网络访问DL/T 814配电自动化系统功能规范Q/GDW 382配电自动化技术导则Q/GDW 513配电自动化主站系统功能规范Q/GDW 514配电自动化终端/子站功能规范Q/GDW 625配电自动化建设与改造标准化设计技术规定2技术要求2.1 概述终端分类及安装形式:站所终端的结构形式可分为组屏式、遮蔽立式、遮蔽壁挂式站所终端。
电力电子技术2-1与信息电子电路中的二极管相比,电力二极管具有怎样的结构特点才使得其具有耐受高压和大电流的能力?答:1.电力二极管大都采用垂直导电结构,使得硅片中通过电流的有效面积增大,显著提高了二极管的通流能力。
2.电力二极管在P 区和N 区之间多了一层低掺杂N 区,也称漂移区。
低掺杂N 区由于掺杂浓度低而接近于无掺杂的纯半导体材料即本征半导体,由于掺杂浓度低,低掺杂N 区就可以承受很高的电压而不被击穿。
2-2. 使晶闸管导通的条件是什么?答:使晶闸管导通的条件是:晶闸管承受正向阳极电压,并在门极施加触发电流(脉冲)。
或:uAK>0且uGK>0。
2-3. 维持晶闸管导通的条件是什么?怎样才能使晶闸管由导通变为关断?答:维持晶闸管导通的条件是使晶闸管的电流大于能保持晶闸管导通的最小电流,即维持电流。
要使晶闸由导通变为关断, 可利用外加电压和外电路的作用使流过晶闸管的电流降到接近于零的某一数值以下,即降到维持电流以下,便可使导通的晶闸管关断。
2-4 图2-27中阴影部分为晶闸管处于通态区间的电流波形,各波形的电流最大值均为I m ,试计算各波形的电流平均值I d1、I d2、I d3与电流有效值I 1、I 2、I 3。
解:a) I d1= I 1= b) I d2= I 2=c) I d3= I 3=2-5上题中如果不考虑安全裕量,问100A 的晶阐管能送出的平均电流I d1、I d2、I d3各为多少?这时,相应的电流最大值I m1、I m2、I m3各为多少?解:额定电流I T(AV)=100A 的晶闸管,允许的电流有效值I=157A,由上题计算结果知 a) I m1A, I m2 I d2c) I m3=2I=314 I d3= 2-6 GTO 和普通晶闸管同为PNPN 结构,为什么GTO 能够自关断,而普通晶闸管不能?答:GTO 和普通晶阐管同为PNPN 结构,由P1N1P2和N1P2N2构成两个晶体管V1、V2,分别具有共基极电流增益和,由普通晶阐管的分析可得,是器件临界导通的条件。
(11-064)电力职业技能考试<<电能表修校>>技师理论试卷一、选择题(请将正确答案的代号填入括号内,每题1分,共77题)1(La2A1053).保证功放电路稳定输出的关键部分是( )。
(A)保护电路;(B)稳幅电路;(C)阻抗匹配电路;(D)控制电路。
答案:B2(La2A1054).下列说法中,错误的是( )。
(A)电压串联负反馈电路能放大电压,电流并联负反馈电路能放大电流;(B)引入串联负反馈后,放大电路的输入电阻将增大;(C)引入电流负反馈后,放大电路的输出电阻将增加;(D) 电流并联负反馈电路能将输入电压变换为输出电流。
答案:D3(La2A1055).在继电保护的原理接图中,一般C代表电容,QF代表( )。
(A)消弧线圈;(B)跳闸线圈;(C)断路器;(D)电压继电器。
答案:C4(La2A1056).下述论述中,正确的是( )。
(A)当计算电路时,规定自感电动势的方向与自感电压的参考方向都跟电流的参考方向一致。
(B)自感电压的实际方向始终与自感电动势的实际方向相反;(C)在电流增加的过程中,自感电动势的方向与原电流的方向相同;(D)自感电动势的方向除与电流变化方向有关外,还与线圈的绕向有关。
这就是说,自感电压的实际方向就是自感电动势的实际方向。
答案:B5(La2A1057).( )保护不反应外部故障,具有绝对的选择性。
(A)过电流;(B)低电压;(C)距离;(D)差动。
答案:D6(La2A2058).对法拉第电磁感应定律的理解,正确的是( )。
(A)回路中的磁通变化量越大,感应电动势一定越高;(B)回路中包围的磁通量越大,感应电动势越高;(C)回路中的磁通量变化率越大,感应电动势越高;(D)当磁通量变化到零时,感应电动势必为零。
7(La2A2059).两个线圈的电感分别为0.1H和0.2H,它们之间的互感是0.2H,当将两个线圈作正向串接时,总电感等于( )H。
能耗知多少|城市轨道交通的用能与节能当下,地铁是解决城市交通拥堵问题的“良方”,但作为大运量的交通工具,在建设和运营过程中能耗不断攀升。
资料显示,轨道交通系统总能耗主要包括电、燃气、燃油、水等能源,其中主要为电力消耗,而电耗的构成以列车牵引用电和通风空调用电占比最大。
1 能源消耗分类2 轨道交通总能耗组成城市轨道交通用能总耗相当大,是名副其实的能耗大户。
按照同等运力,城市轨道交通能耗相当于小汽车的1/9,公交车的1/2 ,且占地小,成本低,对节能减排具有重要意义。
整个城市轨道交通系统里,列车牵引供电系统和通风空调系统是城市轨道交通中最主要的用电大户,分别占到轨道交通系统总能耗的1/2和1/4。
注:图中数据仅做参考,非确定数据。
能源消耗设备、设施——供电系统设备能耗能源消耗设备、设施——列车能耗能源消耗设备、设施——车站和区间动力照明系统能耗能源消耗设备、设施——车辆基地能耗能源消耗设备、设施——控制中心能耗需重点关注的问题和对象第一,城市轨道交通用能评价标准缺失,急需建立轨道交通节能技术标准及评估、评价体系。
由于技术适应性差,如果轨道交通节能技术标准及评估、评价体系从其他行业引入,实际节能效果有限,无法达到预期效果,因此,城市轨道交通急需建立科学合理的评价标准以及科学合理的评价、评估机制。
不同地域、城市之间,同一指标的数值差别较大。
需通过标准制定,明确节能应用标准和评价、评估标准。
第二,城市轨道交通能耗巨大,主要用能系统相对占比很高。
轨道交通耗能专业多,节能优化技术应用前景广阔,通过节能创新技术应用,可大幅度地降低轨道交通能耗。
第三,单一节能技术多,缺乏针对城市轨道交通综合和一体化的考虑,未形成系统性、综合性的节能解决方案。
对某一个系统或专业的节能研究只占到一小部分,没有考虑到各个相关专业之间的联系,以及各个专业之间可能会有的互补或者相关的转嫁作用。
将来综合节能、简单节能、技术简化节能可能会成为轨道交通节能研究的必然趋势,下阶段在这一方面应该有所探讨。
1.简述晶闸管导通的条件与关断条件。
答:在晶闸管阳极——阴极之间加正向电压,门极也加正向电压,产生足够的门极电流Ig,则晶闸管导通,其导通过程叫触发。
关断条件:使流过晶闸管的阳极电流小于维持电流。
实现关断的方式:1>减小阳极电压; 2>增大负载阻抗。
3>加反向电压2.述实现有源逆变的基本条件,并指出至少两种引起有源逆变失败的原因(7分):答:①直流侧要有电动势,其极性须和晶闸管的导通方向一致,其值应大于变流电路直流侧的平均电压;②要求晶闸管的控制角α>π/2,使Ud为负值,电路工作在逆变状态原因:当出现触发脉冲丢失、晶闸管损坏或快速熔断器烧断、电源缺相等原因都会发生逆变失败。
当逆变角太小时,也会发生逆变失败。
不能实现有源逆变的电路有:半控桥电路,带续流二极管的电路。
3.什么是逆变失败?失败的后果?形成失败的原因答:逆变失败指的是:逆变过程中因某种原因使换流失败,该关断的器件未关断,该导通的器件未导通。
从而使逆变桥进入整流状态,造成两电源顺向联接,形成短路。
逆变失败后果是严重的,会在逆变桥与逆变电源之间产生强大的环流,损坏开关器件。
产生逆变失败的原因:一是逆变角太小;二是出现触发脉冲丢失;三是主电路器件损坏;四是电源缺相等。
在电路结构上,电感性负载电路,每个开关管必须反向并联续流二级管17、简述对触发电路的三点要求。
答:1)触发电路输出的脉冲应具有足够大的功率;2)触发电路必须满足主电路的移相要求;3)触发电路必须与主电路保持同步。
18.对于正弦脉冲宽度调制(SPWM),什么是调制信号?什么是载波信号?何谓调制比?答:在正弦脉冲宽度调制(SPWM)中,把希望输出的波形称作调制信号;而对它进行调制的三角波或锯齿波称为载波信号;载波频率fs与调制信号频率f1之比,N= fs / f1称为载波比。
21.试说明SPWM控制的基本原理。
答:PWM控制技术是控制半导体开关元件的导通和关断时间比,即调节脉冲宽度的或周期来控制输出电压的一种控制技术。
能量回馈式可编程电子负载
概述
各种电源类产品:如稳
压电源、UPS、消防应急电
源、直流电源、充电器、发电
机等,出厂前均需要进行负载
老化与试验。
传统的方法是采
用电阻进行能耗放电,这一方
面会消耗大量的电能,另一方
面会大大增加输配电设备的容
量,同时释放的热量会增加空
调的负担。
在电源老化、测试过程中
通常采用特定的非线性负载,
如三线制整流器、四线制整流
器等,同时其功率因数也有特
定要求。
在有源电力滤波器及无功
补偿设备的检验、测试、老化
过程中,不仅有上述要求,同
时还需可设定的三相有功不平衡、无功功率,谐波次数、幅值、相位可编程特性。
华天HTFPL系列能量回馈式可编程电子负载由负载模拟单元、能量回馈单元和可编程人机界面组成,可模拟多种类型的负载,具有精度高、编程灵活、安全可靠、高效节能、维护简单、扩容方便等优点。
系统构成
整机采用模组结构,采用交直交的背靠背双向可调逆变技术,由多个负载、回馈对并联构成,负载单元四线制接入电网、回馈单元三线制接入电网,二者的直流母线正负分别相连。
人机界面通过RS485总线集中监控管理负载单元、回馈单元,模拟小电流负载时,可运行一个负载回馈对,模拟大电流负载时,可运行多个负载回馈对。
每个负载回馈对又可以单独调节输出电流的大小,以达到精确输出的要求。
常见的负载类型已经预存于每个负载单元的控制模块中,通过人机界面可以一键加载。
人机界面具有编程功能,可以自定义任意电流波形,同时,预存了多种负载模版,编程既简单又快速。
负载阶跃时,由光纤信号同步各负载单元,同步特性好。
系统构成框图
工作原理
人机界面与负载单元的控制器通信,指定其加载某种预存的负载电流波形数据,或者下发编程的电流波形数据,控制器中的高速数字信号处理器(DSP)对数据进行处理,得到指令电流,并通过电流跟踪控制电路和驱动电路,以脉宽调制(PWM)信号形式向负载电流发生电路送出驱动脉冲,驱动IGBT或IPM功率模块,生成负载电流,实现各种负载类型的模拟。
每个“负载单元”可以编程输出各种负载波形,其输入的有功功率通过“回馈单元”实现平衡。
由于“回馈单元”可以实现双向能量控制,因此“负载单元”通过编程可以模拟为阻性负载、容性负载、感性负载、整流器负载、电动机、发电机等各种类型的负载,也可以模拟以上几种类型负载的叠加。
工作原理框图
主要特点
可模拟多种负载类型
◆ 阻性负载、感性负载、容性负载,各种负载的组合;
◆ 不平衡负载,如单相负载、线间负载;
◆ 三相四线整流器、单相整流器;
◆ 三相三线六脉整流器、三相三线十二脉整流器;
◆ 单相、三相发电机;
◆ 自定义的任意电流波形负载;
◆ 负载阶跃,可预设阶跃速度,方便试品的响应速度测试。
输出电流控制精度高
◆ 输出30A~600A电流控制精度均可达到3%以下。
模块并联,扩容方便
◆ 模块化,维护简单;
◆ 单独模块故障不影响系统运行,具有冗余功能。
高效节能
◆ 恒频PWM专利技术,纹波小、损耗低;
◆ 整机效率高于92%(满载输出);
◆ 节能,可将有功电能回馈到电网。
人机界面友好,操作方便
◆ 常见负载类型一键加载;
◆ 预存多种模板,编程快速灵活;
◆ 编程数据可存储,调用方便;
◆ 多模块集中管理,按需启动,输出容量可调。
人机界面图
负载模拟测试
输出正弦波小电流控制精度高,达到3%以下
可测试APF及SVG在发电状态下的工作能力
可模拟常见的三相四线整流器负载
可模拟常见的三相三线整流器负载
可模拟AN阻性负载、BN阻性负载、CN阻性负载等不平衡负载可编程,应用灵活,能模拟任意电流波形
可预设阶跃速度,同步特性好
测试标准
命名规则
JB/T 11067-2011 低压有源电力滤波装置GB/T 12325-2008 电能质量供电电压偏差GB/T 12326-2008 电能质量电压波动和闪变GB/T 14549-1993 电能质量公用电网谐波GB/T 24337-2009 电能质量公用电网间谐波GB/T 15543-2008 电能质量三相电压不平衡GB/T 15945-2008 电能质量电力系统频率偏差
20kVA
HTFPL -0.4 / 133kVA
式40kVA 67kVA 100kVA 133kVA 167kVA 200kVA 266kVA 333kVA 400kVA
规格型号表
技术参数表
在并联补偿装置综合测试系统中的应用
无功补偿装置、无源电力滤波器装置、有源电力滤波器装置作为电能质量治理的主要设备,得到广泛的应用。
这些设备在性能测试时需要测试众多指标。
并联补偿装置综合测试系统是适用于各类并联补偿装置的实验平台,可以产生各种类型的模拟负载,方便补偿装置的各种性能测试。
综合配电部分具有补偿装置接入方便、电流及电压采样方便、扩充其它负载方便、保护功能齐全的特点,装设电动操作的总进线开关,可以远程操作。
系统接入调压装置,可用于其它电压等级的设备测试,同时,节省了外网容量。
并联补偿装置综合测试系统框图
在电源装置测试中的应用
可用于UPS、稳压电源等装置的性能测试与老化。
在发电机性能测试与老化中的应用
可用于柴油发电机等装置的性能测试、老化。
专利证书
用户使用报告。