两传感器分布式kalman滤波融合算法及其仿真研究
- 格式:doc
- 大小:300.50 KB
- 文档页数:4
分布式卡尔曼滤波分布式卡尔曼滤波(Distributed Kalman Filter)是一种基于分布式计算的滤波算法,其目的在于对一个由多个传感器组成的系统进行状态估计,其中每个传感器只能观测到系统的一部分状态。
传统的卡尔曼滤波算法是基于单一中心控制器的,该控制器负责整个系统的状态估计和控制。
然而,在实际应用中,系统通常由多个不同地点的传感器组成,因此中心控制器的方式会带来许多问题,比如传感器之间的通信延迟、网络传输带宽限制等,影响了系统的实时性和稳定性。
分布式卡尔曼滤波通过将卡尔曼滤波算法分解成多个局部滤波器,每个局部滤波器只负责对本地观测得到的状态进行估计,在滤波器之间通过局部观测值和相关信息进行信息交互和更新,最终完成全局状态估计。
相比于传统的卡尔曼滤波算法,分布式卡尔曼滤波具有计算资源分布、通信开销小、实时性好等优点,因此在无人机、传感器网络、智能交通等领域得到了广泛应用。
分布式卡尔曼滤波的基本框架如下:-系统模型:系统状态方程和观测方程;-局部估计器:每个局部估计器利用本地观测值对局部状态进行估计,并预测下一时刻的状态;-信息交互:每个局部估计器根据局部观测值和估计结果,与周围局部估计器交换信息,并更新自己的估计值;-全局估计器:全局估计器收集所有局部估计器的消息,整合后获得全局状态估计值。
具体地,分布式卡尔曼滤波可以通过以下步骤进行实现:1.确定系统模型:系统状态方程和观测方程是分布式卡尔曼滤波的关键。
最常用的是线性的系统状态方程和观测方程,可以用矩阵形式表示。
2.选择一个节点作为全局估计器:在分布式卡尔曼滤波中,需要一个节点负责整合所有局部估计值,得到全局状态估计值。
一般选择一个中心节点或者根据特定参数选择最优节点。
3.为每个局部估计器指定观测变量集合:由于每个局部估计器只能观测到系统的局部状态,因此需要在每个局部估计器处预先指定该局部观测变量集合。
这里需要注意,不同局部观测变量之间应当是相互独立的。
时间同步卡尔曼滤波时间同步是指在分布式系统中,各个节点之间保持时间一致,以便协调各个节点的操作。
卡尔曼滤波是一种用于估计系统状态的算法,能够通过融合传感器测量值和系统模型,提供最优的状态估计结果。
本文将以时间同步和卡尔曼滤波为主题,探讨它们的原理和应用。
一、时间同步的重要性在分布式系统中,各个节点的操作需要基于统一的时间参考,以确保协调一致性和数据一致性。
例如,在金融交易系统中,各个交易节点的时间必须同步,以避免交易数据的混乱和错误。
此外,在无线传感器网络中,节点之间需要同步时间才能协同工作,实现数据的准确采集和传输。
二、时间同步的方法时间同步的方法有很多种,常见的有网络时间协议(NTP)和精确时间协议(PTP)。
NTP是一种基于网络的时间同步协议,通过向时间服务器发送请求和响应来实现时间同步。
而PTP是一种基于硬件时钟的时间同步协议,通过精确的硬件时钟和同步消息来实现高精度的时间同步。
三、卡尔曼滤波的原理卡尔曼滤波是一种基于状态空间模型的递推滤波算法,能够通过融合系统模型和测量值,估计出系统的最优状态。
其基本原理是通过对系统状态的预测和测量值的融合,得到对系统状态的最优估计。
卡尔曼滤波的核心思想是通过对系统模型和测量值的不确定性进行权衡,得到对系统状态的最优估计。
具体而言,卡尔曼滤波通过对系统状态进行预测,然后利用测量值对预测值进行校正,从而得到对系统状态的估计。
在不确定性方面,卡尔曼滤波将系统模型和测量值的不确定性都考虑在内,并通过协方差矩阵来表示不确定性的大小。
四、时间同步与卡尔曼滤波的应用时间同步和卡尔曼滤波在许多领域都有广泛的应用。
在无线传感器网络中,时间同步可以用于协调节点的数据采集和传输,提高系统的能源利用率和数据准确性。
而卡尔曼滤波则可以用于传感器数据的融合和状态估计,提高系统的感知能力和决策精度。
在自动驾驶领域,时间同步和卡尔曼滤波也发挥着重要作用。
时间同步可以确保各个传感器的数据在时间上是一致的,从而提供可靠的感知信息。
联邦卡尔曼滤波原理引言:联邦卡尔曼滤波(Federated Kalman Filtering)是一种用于多个分布式传感器数据融合的滤波算法。
与传统的中央集权式滤波算法不同,联邦卡尔曼滤波将传感器数据分布式处理,通过信息交换和融合,实现更准确的状态估计。
本文将介绍联邦卡尔曼滤波的基本原理和应用。
一、卡尔曼滤波简介卡尔曼滤波是一种递归滤波算法,通过使用系统的动力学模型和观测模型,根据先验信息和测量结果,对系统状态进行估计和预测。
卡尔曼滤波在估计问题中广泛应用,特别是在控制和导航领域。
二、联邦卡尔曼滤波原理联邦卡尔曼滤波是将卡尔曼滤波算法应用于分布式传感器网络中的一种技术。
在传统的中央集权式滤波算法中,所有传感器的数据都通过中心节点进行融合处理,然后得到最终的估计结果。
而联邦卡尔曼滤波则将数据处理过程分布到各个传感器节点中,通过交换信息和融合结果,实现联合估计。
具体实现中,每个传感器节点都有自己的卡尔曼滤波器,负责对本地观测数据进行处理和状态估计。
节点之间通过通信网络交换自身的状态估计和协方差矩阵等信息,从而实现联合估计。
每个节点根据接收到的其他节点的信息,更新自身的状态估计和协方差矩阵,进一步提高估计的准确性。
三、联邦卡尔曼滤波的优势联邦卡尔曼滤波相比于传统的中央集权式滤波算法具有以下优势:1. 高效性:联邦卡尔曼滤波将数据处理过程分布到多个传感器节点中,可以并行处理,提高了滤波算法的计算效率。
2. 鲁棒性:联邦卡尔曼滤波中的每个节点都只处理自身的观测数据,对于某个节点的故障或数据异常不会影响其他节点的估计结果,提高了整个系统的鲁棒性。
3. 隐私保护:联邦卡尔曼滤波中的数据处理过程分布在各个节点中,不需要将原始数据传输到中心节点,从而保护了数据的隐私性。
4. 扩展性:联邦卡尔曼滤波可以方便地扩展到大规模的传感器网络中,只需要增加或减少节点即可,而无需改变整体系统的架构。
四、联邦卡尔曼滤波的应用联邦卡尔曼滤波在许多领域都有广泛的应用,例如:1. 环境监测:联邦卡尔曼滤波可以将多个传感器节点的气象数据进行融合,提高对环境变化的估计精度。
无线传感器网络数据融合技术仿真研究发布时间:2023-03-06T02:43:06.241Z 来源:《中国科技信息》2022年第10月19期作者:崔洪亮[导读] 数据融合技术能有效减少网络通信量,降低WSN能量消耗崔洪亮中国电子科技集团公司第四十九研究所黑龙江省哈尔滨市 150001摘要:数据融合技术能有效减少网络通信量,降低WSN能量消耗。
基于此,本文分析了无线传感器网络数据融合技术仿真研究。
关键词:无线传感器网络;数据融合技术;仿真一、扩展卡尔曼滤波算法1、扩展卡尔曼滤波算法。
在线性卡尔曼滤波算法基础上,针对不同网络节点数据噪声,提出了一种改进的扩展卡尔曼滤波算法,用于一定空间范围内的目标定位跟踪。
当前大规模无线传感器网络(WSN)部署在(Ox、Oy)平面坐标系中,且sink点需经多跳网络通信,将区域监测的目标定位、移动轨迹、数据流密度等信息发送给指定的监控主机进行处理。
因此,假设无线传感器网络由i个节点组成,多个sink节点均匀分布在长×宽为m×n的矩形区域中,主要用于数据信息采集、通信路由等功能,基站S的坐标为(Sx、Sy)。
在每个矩形区域部署一个sink节点,sink节点负责区域内目标定位跟踪和融合计算,所有无线传感器节点同构且有相同符号ID。
2、多点共线度。
在无线传感器网络数据监测的二维平面空间中,可能存在3个或更多接近共线的节点,使目标定位信息、测距信息等出现重复或误差问题。
因此,为解决多个节点的共线问题,要引入共线度NC,对多个sink节点组成三角形△ABC余弦值进行定义,并在A、B、C中选择最小角,以衡量多个节点组的共线程度。
由于三角形最小角为0~60°,多个节点组对应的共线度NC取值范围为0.5~1,即当NC=0.5时,多个sink节点形成的三角形为等边三角形;当NC=1时,多个sink节点组处于一条直线上,在这种情况下,目标跟踪定位效果最差。
然而,当3个或更多节点远离目标对象时,即使多个sink节点组形成等边三角形,也难以实现良好的跟踪定位。
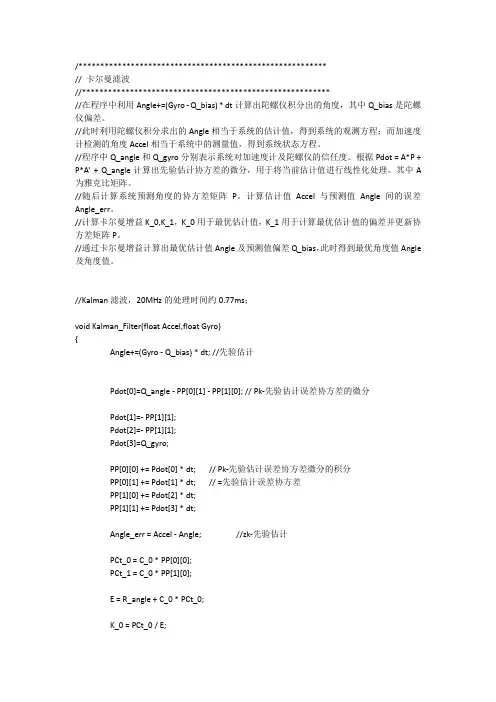
/*********************************************************// 卡尔曼滤波//*********************************************************//在程序中利用Angle+=(Gyro - Q_bias) * dt计算出陀螺仪积分出的角度,其中Q_bias是陀螺仪偏差。
//此时利用陀螺仪积分求出的Angle相当于系统的估计值,得到系统的观测方程;而加速度计检测的角度Accel相当于系统中的测量值,得到系统状态方程。
//程序中Q_angle和Q_gyro分别表示系统对加速度计及陀螺仪的信任度。
根据Pdot = A*P + P*A' + Q_angle计算出先验估计协方差的微分,用于将当前估计值进行线性化处理。
其中A 为雅克比矩阵。
//随后计算系统预测角度的协方差矩阵P。
计算估计值Accel与预测值Angle间的误差Angle_err。
//计算卡尔曼增益K_0,K_1,K_0用于最优估计值,K_1用于计算最优估计值的偏差并更新协方差矩阵P。
//通过卡尔曼增益计算出最优估计值Angle及预测值偏差Q_bias,此时得到最优角度值Angle 及角度值。
//Kalman滤波,20MHz的处理时间约0.77ms;void Kalman_Filter(float Accel,float Gyro){Angle+=(Gyro - Q_bias) * dt; //先验估计Pdot[0]=Q_angle - PP[0][1] - PP[1][0]; // Pk-先验估计误差协方差的微分Pdot[1]=- PP[1][1];Pdot[2]=- PP[1][1];Pdot[3]=Q_gyro;PP[0][0] += Pdot[0] * dt; // Pk-先验估计误差协方差微分的积分PP[0][1] += Pdot[1] * dt; // =先验估计误差协方差PP[1][0] += Pdot[2] * dt;PP[1][1] += Pdot[3] * dt;Angle_err = Accel - Angle; //zk-先验估计PCt_0 = C_0 * PP[0][0];PCt_1 = C_0 * PP[1][0];E = R_angle + C_0 * PCt_0;K_0 = PCt_0 / E;K_1 = PCt_1 / E;t_0 = PCt_0;t_1 = C_0 * PP[0][1];PP[0][0] -= K_0 * t_0; //后验估计误差协方差PP[0][1] -= K_0 * t_1;PP[1][0] -= K_1 * t_0;PP[1][1] -= K_1 * t_1;Angle += K_0 * Angle_err; //后验估计Q_bias += K_1 * Angle_err; //后验估计Gyro_y = Gyro - Q_bias; //输出值(后验估计)的微分=角度}。
两传感器分布式kalman滤波融合算法及其仿真分析 Algorithm and simulation analysis for kalman filtering fusion based Abstract:In this paper six kinds of fusion algorithm based on two-translator using Kalman filter were 1 随着科学技术的发展和现代化战争的需要, 2 为了讨论方便,我们在此只讨论过程与测量噪 <1) <3) <4) <7) <8) <9) <13) <14) <18) 上述分步式滤波过程由图3.1(a>表示,其中虚线框内的分步更新过程由图3.1(b>给出。 ()Pkk (1)Xkk (1)Pkk (11)Pkk Z1(k+1) 2 (11)Xkk 1 (11)Pkk (a) ()k 图3.1 分步滤波过程示意图 仿真中假设有两个传感器同时跟踪一个目 图4.2 SNR 通过图4.1的仿真结果可以看出有一定的融合结果通过图4.2可以看出,信号均方误差与量测均方误差比值小于1 ,且渐渐趋于稳定,FAFSS融合算法确实起到了对航迹优化的目的。 5 结论 本文对多传感器系统的数据融合方法进行了深入研究,运用一种基于分步式滤波的多传感器系统数据融合算法,并给出了算法的理论推导过程和计算机仿真结果。 在融合过程中,不同的融合算法所需的初值条件及对初值的依赖不同,尤其是分层融合算法,如果初值选择不当,滤波效果会很不理想甚至会发散,而在FAFSS算法中,一般是把精度高的传感器作为传感器2做二次的纠正,这样可以得到比较理想的滤波效果。而在实际应用中在系统处理器的允许下,主要从精度考虑,选择不同的融合算法。 参考文献 [1]Y. Bar-Shalom. T. E. Fortman. Tracking and Data Association. Academic press, 1988. [2]M.F. Hassan, et al.,A decentralized Computational Algorithm for the Global Kalman Filter. IEEE Trans. On Automat. Contr. ,Vol. AC-23,1978:262-268. [3] 文成林,吕冰. 一种基于分布式滤波的数据融合算法. 电子学报. 2004 . Vol32 [4] 何友. 多传感器信息融合及应用. 电子工业出版社. 2007.12. [5] 韩崇昭,朱洪艳等.多源信息融合.清华大学出版社.2006 [6] 何子述,夏威. 现代数字信号处理及其应用. 清华大学出版社.2009 [7]王欣,朱奇丹,孙书利.基于NETDDE的网络式多传感器信息融合Kalman滤波器.科学技术与工程.Vol.8 2008.12. [8] 程铮,王兴. 分布式多传感器航迹融合算法与仿真分析. 中国自控网. [9] 贾海涛,张伟. 数据融合综述. 综合电子系统
摘要:讨论了基于两传感器kalman滤波的数据融合算法,对FAFSS算法机理进行了描述并融合算
法进行了仿真,分析了融合结果。
关键字:kalman滤波;分布式传感器信息融合;分布式滤波数据融合算法
on distribute two-sensor
SHEN ZhenYANG Fan
(Research Institute of Electronic Science and Technology of UESTC, Chengdu, 611731>
discussed.According to the FAFSS fusion algorithm, the fusion tracks and square error were analysed through
simulation.
Key words:Kalman filtering;distribute-translator information fusion algorithm;fusionalgorithm of
filtering step by step
引言
信息融合作为一门新兴交叉学科,在近年来得到
了广泛关注和快速发展。而多传感器多目标航迹
融合算法方法的研究,一直是多传感器多目标跟
踪及信息融合领域的一个热点。
状态融合估计方法主要有基于状态的融合和
基于测量的融合。前者对每个传感器的测量数据
进行滤波估计后将其按照最大似然原则融合成最
终的状态融合估计,是一种次优算法。而后者是
一种基于最小均方差(MMSE>的最优融合算法,
从结构上来看, 最优融合<位置融合级系统)算法
主要有集中式、分布式、混合式和多级式。集中
式结构因数据互联较困难,并且要求系统必须具
备大容量的处理能力,计算负担重系统的生存能
力也相对较差等缺点。混合式体系结构是集
中式和分布式两种形式的结合,这种结构比较复
杂一般用于大型融合系统。工程上多采用分布
式结构,分布式滤波数据融合算法
系统描述
声是相互独立,系统中不含控制项,且各传感器
位于同一地理位置的情况。
考虑一类多传感器动态系统
<2)
其中整数k≥0为离散时间变量,
为状态向量,是系统
矩阵;系统过程噪声为高斯白噪声
序列,具有如下的统计特性
式中为非负定矩阵。
两传感器以相同的采样速率对目标的特征进
行观测,式(2>中是第i个传感器对
目标状态的观测值,是测量
矩阵,测量噪声是高斯白噪声序列,具有如下的统计特性 <5) <6) 上式中为正定矩阵。 3 分布式数据融合算法 在进行时间,空间对准和航迹相关以后,另一个重要的问题便是如何利用已有的局部航迹进行组合。建立分布式系统的融合航迹,其目的是为了利用各单站丰富的信息,提高航迹的精度。各雷达利用kalman滤波技术给出不同精度的局部航迹。分布式雷达的系统中心将对局部航迹进行处理,建立系统级的融合航迹。 假设分布式多传感器信息融合系统由两个传感器LP1和LP2组成的,和是传感器LP1关于k时刻的目标状态最小均方误差估计和误差协方差矩阵,和是传感器LP2关于时刻k的目标状态最小均方误差估计和误差协方差矩阵。则分布式航迹融合的目的就是依据上述条件获得优化的全局航迹估计和状态估计协方差。 融合算法有很多种,滤波协方差阵表征了不同雷达航迹数据精度的差别,我们可以用作为加权因子,对航迹进行融合,根据互协方差矩阵是否为零我们有简单融合算法和加权协方差航迹融合算法。从最佳组合的角度根据线性估计论可以得到线性融合算法。分层融合是指各传感器在每一步都基于自己的数据维持自己的航迹,而后各个传感器的航迹传输到一个中心处理器在此处融合生成一个精确的全局航迹文件,他是由kalman滤波的角度出发得到的,还有矩阵加权航迹融合算法可基于kalman滤波的分布式滤波数据融合算法
和预测误差协方差。
2、用Z1(k+1><低精度传感器的量测)对
进行更新,得到状态X(k+1>基于和
观测信息Z1(k+1>的估计值和相应的估计误差协
方差阵
<10)
其中
<11)
<12)
3、用Z2(k+1><高精度传感器对目标的量
测)对进行更新,得到状态
X(k+1>基于和观测信息Z1(k+1>、Z2(k+1>的
估计值和相应的估计误差协方差阵
3 / 4
<15)
其中
<16)
<17)
采用两传感器融合时,得到的k+1时刻的融
合结果:
(19>
(20>
分步更新
ˆ
()Xkk
ˆ
ˆ
(11)Xkk
Z2(k+1)
1
ˆ
(1)Xkk
ˆ
(1)Pkk
2
(b)
()Qk
4
仿真结果
标,系统采用分布式融合结构,LP1的测距和测
角误差分别为,,
,观测噪声标准差delta1=5m,采
样时间t1=0.5S;传感器LP2的测距和测角误差
分别为,,
,观测噪声标准差delta1=3m,采
样时间t2=0.5S。基于FAFSS的仿真结果如下
图4.1 FAFSS(分布式滤波数据融合>算法仿真
4 / 4
技术教育部重点实验室2009年会会议论文集