第四章 船舶稳性
- 格式:doc
- 大小:267.00 KB
- 文档页数:15
船舶初稳性高度计算稳性(stability)是指船舶在外力矩(如风、浪等)的作用下发生倾斜,当外力矩消除后能自行恢复到原来平衡位置的能力。
船舶稳性,按倾斜方向可分为横稳性和纵稳性;按倾斜角度大小可分为初稳性(倾角100以下)和大倾角稳性;按外力矩性质可分为静稳性和动稳性。
对于船舶来说,发生首尾方向倾覆的可能性极小,所以一般都着重讨论横稳性。
船舶是否具有稳性以及稳性好坏,决定于G点与M点的相对位置和G和M间距离的大小,即GM值是衡量船舶稳性好坏的标准,称GM值为初稳性高度。
它与稳性的关系是:当M点在G点之上时,GM>0,船舶具有稳性,GM值越大,稳性越好,但船舶摇摆就会加剧;当M点在G点之下时,GM<0,船舶不具有稳性,一旦受到外力矩作用很容易使船倾覆;当M点和G点重合一点时,GM=0,船舶也不具有稳性,因为一旦受到外力矩作用,船舶处于随遇平衡状态,对船舶也极不安全。
1.船舶装载后的初稳性高度GM:GM=KM--KG{KM--为船舶横稳心距基线高度(米)KG--为船舶装载后重心距基线高(米)KM--可由船舶资料静水曲线图按平均吃水查得}2.舶装载后重心距基线高KG:KG=( DZ g+∑P i Z i)/Δ { D--空船重量(吨);查船舶资料得;Zg--空船重心距基线高度(米);查船舶资料得;Pi--包括船舶常数,货物总重量,船员及供应品,备品,油水重量(吨);Z i--载荷Pi的重心高度(米);∆--船舶排水量(吨);}3.自由液面的影响δGM f :δGM f=∑ρi x/Δ {ρ—舱内液体的密度(克/立方米)ix---液舱内自由液面对液面中心轴的面积横矩(M4)}4.经自由液面修正后的初稳心高度G o M:G o M=KM--KG--δGM f5.船舶横摇周期Tө:Tө=0.58f√(B+4KG)/G o M {0.58为常数;f—可由B/d查出;B—船舶型宽;d—船舶装载吃水;}常识:20尺柜:20’0” x8’ 0” x8’ 6”,6.058x2.438x2.591米,内容积为5.69x2.34x2.18米,,体积为24-26立方米。
船舶运动稳定性的计算与分析随着航运业的不断发展,船舶在海洋中的运行也越来越多。
但是,船舶在海上航行时,由于海浪的影响,总会产生各种各样的不稳定因素,给船舶运行带来困难和风险。
因此,确保船舶的运动稳定性显得尤为重要。
船舶的运动稳定性就是指在海上航行时,船体保持平衡,避免翻船或侧翻的概率。
要保证船舶的运动稳定性,首先需要进行计算和分析,以确保航行时侧倾角度控制在可接受的范围内。
一、船舶运动稳定性的计算与分析方法1. 船舶稳性计算方法船舶稳性计算是指通过测量、计算和分析船舶稳态和动态数据,得出船舶受到波浪力和风力时的稳态和动态特性。
主要包括稳态、动态稳定性、自由恢复性等。
船舶稳性计算主要通过计算公式和图表进行。
2. 有限元方法有限元方法是一种数学计算方法,它以船舶的结构模型作为基础,对船舶运动的三维模型进行求解,从而得到船舶的运动稳定性。
有限元方法可以考虑到船体柔性变形、复杂海浪和气象特性等,因此可以更加精确地计算船舶的运动稳定性。
3. 模拟计算方法模拟计算方法是指建立船舶运动稳定性的数学模型,通过数字仿真计算,得到船舶在风力和波浪下的受力和运动情况。
模拟计算方法包括动态稳定性分析、湍流流场计算等。
二、船舶运动稳定性的影响因素船舶的运动稳定性不仅受到自身结构的影响,还受到外部因素的影响。
1. 船舶结构因素船体的尺寸、形状、重心位置、装载状态、船尾设计等均会影响船舶的运动稳定性。
在进行船舶结构设计时,需要考虑以上因素对稳定性的影响。
2. 外部气象海况因素外部气象海况因素包括风速、浪高、浪向等。
当气象海况恶劣时,对船舶的稳定性造成的影响较大,因此需要及时掌握并采取相应的预警措施。
3. 航线选择航线上存在的航行条件也会对船舶运动稳定性造成一定的影响,如港口、卡口、水深等,需要在航行前进行详细的规划和考虑。
三、船舶运动稳定性的应对措施1. 船舶结构设计在船舶结构设计时,应根据航行的环境条件,合理选择船舶的尺寸、重心位置等参数,以优化船舶的稳定性。

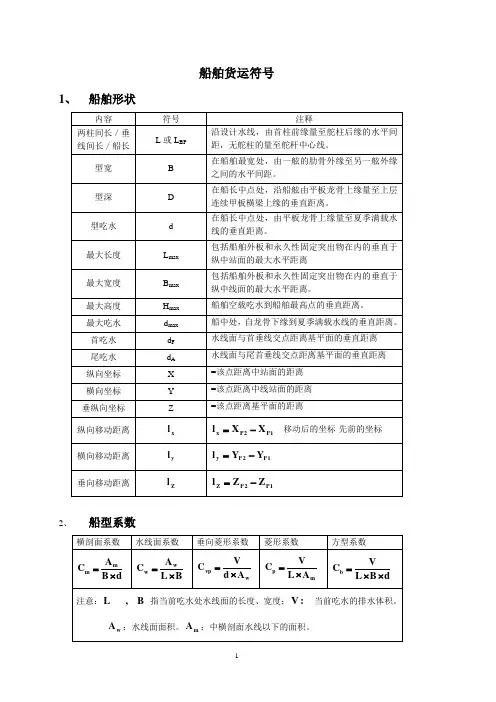
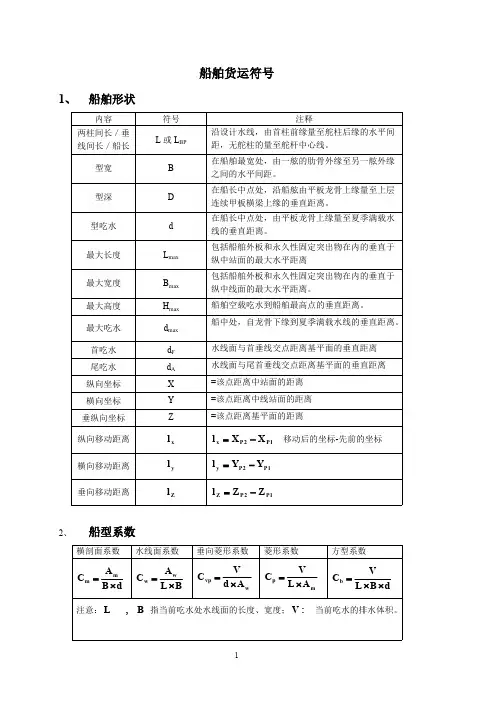
船舶货运符号1、船舶形状2、船型系数3、常用位置点3.其它4.稳性参数基本公式:第二章:近似算法梯形法 )2(00nni i y y y l A +-=∑= 辛一法 )4(31321y y y l A ++=辛二法 )33(834321y y y y l A +++=第三章:浮性1.重量、重心计算:i P D D ∑+=1 11)(1D M D X P X D X xp i g g i =⋅∑+⋅= 1)(1D Y P Y D Y i p i g g ⋅∑+⋅=11)(1D M D Z P Z D Z Zp i g g i =⋅∑+⋅=注意:利用合力矩定理,∑==n1i (力矩)分力对该轴或支点取的的力矩合力对某一支点或轴取其中:11g g 1g 1Z ,Y ,X ,∆为装卸后重量、重心。
g g g Z ,Y ,X ,∆为装卸前重量、重心,Pi Pi i P iZ ,Y ,X ,P ,为装卸货物重量、重心,装货为+,卸货为—x M :全船重量纵向力矩; Z M :全船重量的垂向力矩;2.少量装卸对吃水影响TPC100Pd P =δ W A TPC ρ01.0=其中:TPC -当前水域密度下的每厘米吃水吨数。
P -装卸货物重量,装货为+,卸货为—3.舷外水密度变化对船舶吃水的影响⎰=b aydxA⎪⎪⎭⎫ ⎝⎛-⨯=1100211ρρδρTPC Dd 其中: 1ρ-先前的水域密度;2ρ-后来的水域密度第四章 稳性1.初稳性高度定义式:g M Z Z GM -= M Z 根据型吃水查静水力资料,g Z 利用公式计算 2.船内垂移货物(初始正浮): Dpl GM M G z-=1 3.船内横移货物(初始正浮):GMD P tg y ⋅=θ4.自由液面的影响 Di GM M G xii ∑-=ρ1其中:自由液面修正量为 DiGMix i f∑=ρδx i -水线面的自由液面惯矩,对于矩形液面 3x lb 121i =对于等腰梯形液面)b b )(b b (481i 222121x ++=注意:GM 是指船舶装载与液体同重的固体时的初稳性高度,即没有考虑液体的流动性。
稳性定义又称“复原性”。
船舶在外力作用消除后恢复其原平衡位置的性能。
概述稳性船舶受外力作用偏离其正浮平衡位置,当外力消失后能自行恢复到原平衡位置的能力,称之为稳性。
具有这种能力的船是稳定的,否则是不稳定的或随遇平衡的(即能停留在任何倾斜角状态)。
按倾角大小可分为初稳性(即小倾角稳性)和大倾角稳性。
按倾角的方向可分为横稳性和纵稳性。
船的横倾最为常见,故单讲稳性时即指横稳性。
按船舶破损浸水与否,又可分为破损稳性和完整稳性。
初稳性又称小倾角稳性。
船舶在外力作用下作小角度倾斜时的稳性。
如无特别注明,初稳性则指横向初稳性。
小角度倾斜一般是指横倾角不大于10°——15°,或横倾角不大于上甲板边缘浸入水中及舭部不露出水面的角度的状态。
其重要特征参数是初稳性高。
除考虑船舶在正常漂浮状态下的稳性外,在下水、进坞、搁浅、受凤浪袭击、甲板上浪、船上部结冰,以及受武器攻击、触礁和碰撞破舱等情况下也需分析其稳性。
船舶稳性是保证安全的一项重要性能,各国都制定有船舶稳性规范。
近代船舶稳性的研究已关注到船舶在风浪中运动时的稳性。
通过计算或用船模进行各种稳性试验可预报船舶稳性。
图中,a的状态是稳定的,b的状态是不稳定的。
国内航行船舶稳性特殊要求所有商船在各种装载状态下都应满足上述关于稳性的基本要求。
但考虑到船舶在使用过程中,实际可能的装载状态是千差万别、千变万化的,为了简化计算工作,法规对各种类型的船规定了应校核的标准装载情况,只要这些标准载况下船舶的稳性满足规范的要求,则可认为船舶稳性符合要求。
法规同时指出,船舶如有某种装载情况,比规定计算的标准载况差时,则应加算这种情况的稳性。
在计算各种载况的稳性时,除另有规定外,对燃料及备品的计算重量,一般是这样规定的:出港取为100%,航行中途为50% ,到港为10%。
法规对各类船舶规定核算的载况简述如下:1.干货船应核算以下四种基本装载情况的稳性:满载出港、满载到港、压载出港、压载到港。
第2章完整稳性衡准第1节一般规定2.1.1当船上设置除毗龙骨以外的防摇装置时,应确保该装置工作时上述衡准仍能保持,且供电系统的失效或装置的故障不会导致船舶无法满足本篇的有关要求。
2.1.2应在必要的范围内考虑一些不利于稳性的影响因素,诸如顶部和舷部结冰、甲板上浪O2.1.3考虑到类似由于吸水和结冰引起的重量增加,及由于燃料和备品的消耗引起的重量减少等因素,应为航程的各阶段的稳性安全界限做出规定。
2.1.4每船均应备有1份由验船部门批准的稳性手册,该手册应含有足够的资料以使船长能够按本篇规定的使用要求操纵船舶。
2.1.5如果最小营运初重稳距(GM)曲线(或表)或者最大重心坐标(KG)曲线(或表)用于表示符合完整稳性衡准,这些限制曲线应包含整个营运纵倾范围,但验船部门认为纵倾影响不大时除外。
当上述曲线或表格无法囊括营运纵倾,船长应当核实作业情况没有偏离经设计的装载工况,或通过计算证实考虑到纵倾影响后该装载工况满足稳性衡准。
应为气象衡准数,这是稳性衡准数之一!图 2.2.2.12.2.2.2动稳性曲线因进水角为影响而中断时,除了用经过动稳性曲线中断处的割线代替上 述切线外,其余均同上述2.221所述(如图2.222)。
图 2.2222.2.3风压倾侧力臂。
按下式计算:Z P∖Zl v = -------- m v9810Δ式中:p —单位计算风压,p a ;按225要求计算;4——船舶装载水线以上受风面积,(包括甲板上装载物),m 2,按226要求计算;Z ——计算风力作用力臂,m ;按224计算;」——所核算装载情况下船舶排水量,32.2.4 计算风力作用力臂Z 为在所核算装载情况下船舶正浮时受风面积中心至水线的垂向距离。
受风面积中心应用通常确定图形形心的方法求得。
2.2.5 单位计算风压P 应按计算风力作用力臂Z 及不同航区由表2.2.5线性插值查得:单位计算风压P (Pa)表2.2.5本来2000规则已经回归成了光顺曲线的数据,应作为一个鱼腥味的亮点,现在又抄回去了,真佩服这复旧的能力!其航区之间有L83和2.00倍的关系。
船舶稳性第二章我们学习了船舶的浮性,知道船舶在静水中平衡时受到重力和浮力两个力的作用,这两个力方向相反、大小相等、作用点(重心和浮心)在同一铅垂线上,那么当船受到另外一个倾斜力的作用后,船能否在倾斜力消失后恢复到平稳状态呢?这就是我们今天要学习的“船的稳性”问题。
本节课我们的主要内容有:稳性的概述,讨论稳性问题的关键知识点(也就是初稳性公式推导的准备和过程),初稳性公式及应用。
下面我们先看一下“稳性的概述”,这一部分主要有三个知识点:稳性概念、稳性分类、倾斜力矩和复原力矩。
一、稳性:船舶在外力作用下偏离其平衡位置而倾斜,当外力消失后,能自行回复到原来平衡位置的能力,称为船舶稳性。
或者说:是船舶在外力作用消失后保持其原有位置的能力。
二、稳性分类:按作用力矩性质分为:静稳性和动稳性,静稳性:假若倾斜力矩的作用是从零开始逐渐增加,使船舶倾斜时的角速度很小,可忽略不计,因此船舶在倾斜过程中不计角加速度和惯性矩;动稳性:若倾斜力矩是突然作用在船上,使船舶倾斜有明显的角速度的变化,则这种倾斜下的稳性称为动稳性。
船舶在倾斜过程中计角加速度和惯性矩。
按倾斜方向分:横倾和纵倾,船舶的横向倾斜,即向左舷或右舷一侧的倾斜(简称横倾);纵向的倾斜,即向船首或船尾的倾斜(简称纵倾);倾斜力矩的作用平面平行于中横剖面时称为横倾力矩;倾斜力矩的作用平面平行于中纵剖面时称为纵倾力矩;按倾斜角度分:初稳性(或称小倾角稳性):倾斜角度小于10度~15度或上甲板边缘开始入水前的稳性;大倾角稳性:一般指倾角大于10度~15度或上甲板边缘开始入水后的稳性。
因为在研究船舶小倾角稳性时可以引入某些假定,既使浮态的计算简化,又能较明确地获得影响初稳性的各种因素之间的规律。
所以小倾角稳性即初稳性的研究具有重要意义。
三、力矩:船舶在停泊或航行过程中会受到各种外力,这些外力作用对船施加一个力矩,即倾斜力矩;倾斜力矩的来源有:1)风浪的作用;2)船上货物的移动;3)旅客集中于某一船舷;4)拖船的急牵、火箭的发射、船舶回转等,倾斜力矩大小取决于这些外界条件的作用,是外因。
具体实验内容:格式样板如下,字体均用宋体。
(填空,每空1分,共25分)船舶稳性实验1、实验目的(10)船舶的初稳心高度h是衡量船舶稳定性的重要指标,因此正确地求出初稳心高度h是十分重要的。
在船舶设计阶段,通常是按分配计算方法求取空船的重量和重心位置,与船舶建成后的实际重量和重心位置往往有一定差异,故在船舶建成后都要进行船舶倾斜试验,以便正确地求得船舶重量和重心位置,因此船舶倾斜试验的目的:1.确定船舶重量和重心高度,并将试验结果整理成空船状态下的重心位置及初稳性高度。
2.检验设计阶段计算的船舶重量和重心,为以后设计同类船舶提供能考资料。
2、实验原理(15)船舶倾斜试验是采用重物的移动使船舶产生倾斜所形成的力矩平衡原理。
当船舶正浮于水线WL时,其排水量为D。
若将船上A点处的重物P横向移动距离L至1A时,则船将产生倾斜角,并浮于新的水线W1L1,如图所示。
稳动重量所形成的横倾力矩力:MQ=PLcosθ船在横倾 角后回复力矩为:Mh=Dhsinθ由于船舶横倾至θ角时已处于平衡状态,根据力矩平衡原理,Mθ=Mh,则试验状态的重心高度为:式中为试验状态横稳心距基线的高度,D 为试验状态的排水量,可根据试验时的吃水由静水力曲线查得。
3、实验步骤(10)倾斜试验所用的移动重物一般为生铁块,并分成四组堆放于甲板指定的位置,每组重量相等,即P1=P2=P3=P4,为了形成足够的斜倾力矩使船舶产4~2°的横倾角,移动重物的总量约为船舶排水量的1~2%,移动距离L 约为船宽的3/4.1.试验开始前,记录移动重物的重量及其布署位置,每组重量移动的距离L 。
3.按顺序搬动重物。
4、实验数据及其处理(40)根据测得的倾角数据计算船舶初稳心高度,并给出算例 船舶排水量D=9kg移动重物质量m=5g ,m=10g ,移动的位移L=6.96cm ,L=4.66cm以第二组数据计算过程为算例:移动重物质量为5g ,移动距离为6.960cm ,倾角为0.18° 移动力矩:M=5*6.960=34.8gcm tan Φ=0.003初稳性高cm 2889.1003.090008.34tan h =⨯=∆=φM同理可得剩余实验数据处理结果:5、思考题(20)(1)装卸小量载荷应该控制在什么范围内?为什么?控制载荷不会导致船舶倾斜角度大于10到15度或上甲板边缘开始进水。
船舶设计要求标准船舶设计是一门需要综合考虑工程技术、安全规范以及经济效益的学科。
为了确保船舶的安全性、可靠性和性能,各国都制定了相应的船舶设计要求标准。
本文将介绍船舶设计中常见的要求标准,包括船体结构、安全设备、稳性等方面。
一、船体结构要求船体结构是船舶的骨架,承受船舶自身重量以及海上风浪等外部环境作用力。
船体结构要求标准涉及船体材料、结构设计以及焊接等方面。
其中,船体材料要求标准包括高强度钢板、船用铝合金等材料的应用;结构设计要求标准包括强度计算、刚度设计以及防腐涂料等;焊接要求标准包括焊接工艺、焊接质量检验以及焊接材料的选择等。
二、安全设备要求船舶安全设备是保障船舶人员生命安全和船舶安全的重要组成部分,船舶设计要求标准涉及救生设备、消防设备以及导航设备等方面。
救生设备要求标准包括救生艇、救生圈、救生衣等的数量、规格和布局要求;消防设备要求标准包括消防器材、火灾报警系统、防火间隔等要求;导航设备要求标准包括雷达、GPS、声纳等设备的配置和性能要求。
三、船舶稳性要求船舶稳性是指船舶在水上运行时保持平衡的能力,船舶设计要求标准涉及稳性计算、浮力分析以及倾覆力矩要求等方面。
稳性计算要求标准包括艏向稳性、极限载重能力、交会角要求等;浮力分析要求标准包括船体浮起和浮置位置计算;倾覆力矩要求标准包括临界倾覆力矩、稳定性曲线等要求。
四、机电设备要求船舶机电设备是船舶正常运行和安全操控的关键,船舶设计要求标准涉及主机、推进器、电气设备以及通信设备等方面。
主机要求标准包括功率、转速、燃油消耗等要求;推进器要求标准包括尺寸、效率、噪音限制等;电气设备要求标准包括输电线路、配电系统、保护设备等;通信设备要求标准包括雷达、无线电、卫星导航等。
综上所述,船舶设计要求标准涵盖了船体结构、安全设备、稳性和机电设备等方面。
遵守这些标准能够保证船舶的安全运行和航行性能。
船舶设计要求标准的制定应与国际标准接轨,并且随着技术的不断发展和船舶设计的进步,需要及时修订和完善,以适应船舶工程的新需求。
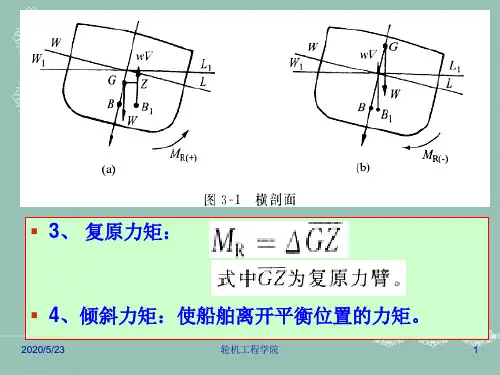
第一节 稳性的基本概念船舶平衡的3种状态: 1.船舶的平衡状态船舶漂浮于水面上,其重力为W ,浮力为△,G 为船舶重心,B 为船舶初始位置的浮心。
在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B 移至B 1点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。
(1)稳定平衡。
如图(a )所示,船舶倾斜后在重力W 和浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。
(2)随遇平衡。
如图2-1所示,船舶倾斜后重力W 和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。
(3)不稳定平衡。
如图2-1(c )所示,船舶倾斜后重力W 和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。
2.船舶平衡状态的判别为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M 表示。
由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。
进一步分析表明,船舶处于何种平衡状态与重心G 和稳心M 的相对位置有关。
船舶稳定平衡时,重心G 位于稳心M 之下;船舶不稳定平衡时,重心G 位于稳心M 之上;船舶随遇平衡时,重心G 和稳心M 重合。
因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩s M 的大小。
由图(a )可见,该稳性力矩大小为s M GZ =∆⋅式中:GZ ──静稳性力臂 (m ),是船舶重心G 至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。
船舶稳性的分类: 船舶在外力矩作用下偏离其初始平衡位置而倾斜,当外力矩消失后船体能自行恢复到初始平衡状态的能力称为船舶稳性。
船舶稳性通常可按以下方法分类:1.按船舶倾斜方向分类。
可分为横稳性和纵稳性。
横稳性指船舶绕纵向轴(x轴)横倾时的稳性,纵稳性指船舶绕横向轴(y轴)纵倾时的稳性。
由于纵稳性力矩远大于横稳性力矩,故实际营运中不可能因纵稳性不足而导致船舶倾覆。
2.按倾角大小分类。
可分为初稳性和大倾角稳性。
初稳性(小倾角稳性)指船舶微倾时所具有的稳性,微倾在实际营运中将倾斜角扩大至10°~15°;大倾角稳性指当倾角大于10°~15°时的稳性。
3.按作用力矩的性质分类。
可分为静稳性和动稳性。
静稳性指船舶在倾斜过程中不计及角加速度和惯性矩时的稳性;动稳性指船舶在倾斜过程中计及角加速度和惯性矩时的稳性。
4.按船舱是否进水分类。
可分成完整稳性和破舱稳性。
船体在完整状态时的稳性称为完整稳性,而船体破舱进水后所具有的稳性则称为破舱稳性。
第二节船舶初稳性船舶初稳性的基本标准:理论证明:船舶在微倾条件下,倾斜轴过初始水线面的面积中心即初始漂心F;过初始漂心F微倾后船舶排水体积不变;当排水量一定时,船舶的稳心M点为一定点。
船舶初稳性是以上述结论为前提进行研究和表述的。
船舶在小倾角条件下,稳性力矩M s和稳性力臂GZ可表示为Ms=ΔGM sinθGZ=GM sinθ式中:GM───船舶重心与稳心间的垂直距离,称为初稳性高度(m);θ───船舶横倾角(°)。
由上式可见,在排水量及倾角一定情况下,静稳性力矩大小取决于重心和稳心的相对位置,即取决于GM大小。
当M点在G点之上,GM为正值,此时船舶具有稳性力矩并与GM值成正比;当M点在G点之下,GM为负值,此时船舶具有倾覆力矩亦与GM值成正比;当M点和G点重合,GM为零,此时稳性力矩为零。
由此分析可知,GM可以作为衡量船舶初稳性大小的基本标志。
欲使船舶具有稳性,必须使GM>0。
初稳性高度GM的计算: 1.由装载排水量查取横稳心距基线高度KM;2.根据装载方案按下式计算船舶KG:i i p zKG=∆∑3.按式GM=KM-KG计算船舶初稳性高度GM。
自由液面对初稳性高度的影响:船上各液体舱柜在液体未充满整个舱内空间时随船舶横倾而向倾斜一侧移动,该自由流动的液体表面称为自由液面。
当船舶倾斜时,舱柜内液体随之流动,使液体的重心向倾斜一方移动,产生了一与稳性力矩方向相反的倾斜力矩,从而减少了原有的稳性力矩,也即降低了船舶初稳性高度。
自由液面对初稳性高度的修正值表达式:由于自由液面影响而使初稳性高度减小,其减小值δGM f可表示为xf i GM ρδ=∆式中: ρs -―液体密度(g/cm 3);i x ───液舱柜内自由液面对液面中心轴的面积惯矩(m 4)。
当存在多个自由液面时,δGM f 为xf i GM ρδ=∆∑减少自由液面影响的措施:船舶在建造和营运中,应尽量减小自由液面对稳性的影响,其具体措施包括:1.减小液舱(柜)宽度。
液体散装货船因装载大量液体货,其自由液面对稳性影响较大,为此船舶在设计时,通常都设置一道或两道纵向舱壁,将液舱宽度减小。
对于普通货船的双层底内,其左右也是水密分隔成两个液柜。
矩形液面的液舱内设置一道纵向舱壁将其宽度二等分,i x 将减至原来的1/4;设置两道纵向舱壁将其宽度三等分,i x 则减至原来的1/9。
对于等腰梯形或等腰三角形液面的液舱,若中间设置一道纵向舱壁,将其左右宽度等分,i x 则会减至原来的1/3。
增设横舱壁则不会减少自由液面对稳性的影响。
2.液舱(柜)应尽可能装满或空舱。
对于液体散装货船,各液体货舱在考虑适当的膨胀余量后应尽量装满,若舱容有剩余,则可保留若干空舱,以减少具有自由液面的舱数。
对于普通货船的油水舱,应逐舱装载和使用,这样可保持在航行中船舶未满液柜数最少。
3.保持甲板排水孔畅通。
在开航前应认真检查上甲板两舷排水孔是否畅通,并防止航行过程中堵塞,以确保甲板上浪后能迅速排出,减小因上浪而在上甲板形成自由液面的作用时间。
航行中如遇严重甲板上浪,应适当采取改向或减速措施,并注意排除排水孔排水障碍物。
4.注意纵向水密分隔是否有漏水连通现象及是否有不必要的积水。
液舱(柜)内纵向隔壁因锈蚀、不适当受力或建造缺陷,致使漏水连通而形成较大自由液面。
另外,船舶在营运中各污水舱内会积聚一定污水,应及时测量并排出。
5.在排水量较小时,更应重视液舱内自由液面对稳性的不利影响。
第三节 载荷移动、重量增减、货物悬挂对稳性的影响及计算载荷移动对稳性的影响:1.船内重物水平横移船内重物水平横移,船舶重心偏离中纵剖面,横坐标改变,使之原有的平衡状态发生变化,将使船舶产生横倾角,初始水线WL 与横倾后的水线W 1L 1之间的夹角θ即为船舶横倾角。
船在海上航行由于横摇导致重物横移时,同样使船横倾。
2.船内重物垂移船内重物垂向移动,将引起船舶重心的垂向改变,从而导致初稳性高度的变化。
由于重物移动前后船舶排水量Δ不变,故初稳心距基线高KM 也未发生改变,因而重物垂移引起的初稳性高度改变量δGM 在数值上等于船舶重心的垂移量GG 1。
船内重物上移,船舶重心上移,GM 降低;船内重物下移,船舶重心下移, GM增大。
重量增减对稳性的影响: 根据重量增减的不同数量及求取初稳性高度改变量的不同方法,重量增减可分成大量增减和少量增减两种情况。
若船舶初始排水量为△,重量增减量为∑p i,则一般认为当∑p i>10%时为重量的大量增减,当∑p i<10%时为重量的少量增减。
1.重量大量增减设船舶重量增减后排水量发生变化,从而引起初稳心距基线高KM的改变,重量增减量产生的垂向重量力矩为∑p i z i,导致则重量增减后船舶重心高度改变,根据初稳性高度计算公式,可求得重量增减后的GM。
2.重量少量增减在假设加载后初稳心M点位置不变的前提下,首先将重量在船舶原重心处增减,则重量少量增减后船舶的重心位置不变;然后将重量移至实际装载位置上,从而引起船舶重心位置改变。
显然,当重量增加时,重量装于船舶原重心之上,船舶重心提高,初稳性高度减小;反之,船舶重心降低,初稳性高度增大。
当重量减少时,与之当重量增加时的情况相反。
货物悬挂对稳性的影响:船内重量为P的悬挂货物其重心位于q1点且悬挂于m点时,当船舶横倾 角时,P在其重力作用下将由1q点移到2q点。
由此悬挂货物对船舶产生横倾力矩,从而减少了原有的稳性力矩,船舶的初稳性高度也相应减小。
显q点垂直上移到悬挂点m 而易见,悬挂货物对初稳性的影响相当于把货物自重心1处,从而使船舶重心G点上移,致使初稳性高度减小,可以把它的重心理解为在悬挂点m处,m点称为悬挂重物的虚重心。
第三节船舶大倾角静稳性大倾角静稳性基本概念: 1.船舶在海上航行中,由于风浪的作用往往使船舶横倾角超过10°~15°,这时船舶的稳性就称为大倾角静稳性。
大倾角稳性和初稳性的区别为:首先,两者对应的船舶横倾角不同。
船舶横倾角θ小于10°~15°时对应的稳性为初稳性,而横倾角大于10°~15°时对应的稳性即为大倾角稳性。
其次,船舶在大倾角横倾时相邻两浮力作用线交点不再为定点M。
再次,船舶大倾角横倾时倾斜轴不再过初始水线面漂心。
最后,船舶大倾角稳性不能GM 作为基本标志来衡量。
2.大倾角静稳性的基本标志船舶在外力矩作用下发生大倾角横倾,当外力矩消失后,船舶重力和浮力仍然形成力偶,其力矩即为静稳性力矩或称复原力矩,表示式为:M=Δ·GZs船舶在排水量一定的条件下,稳性力矩M s大小取决于船舶重心G到倾斜后浮力作用线的垂直距离,即取决于静稳性力臂GZ,并与GZ成正比,因此,静稳性力臂GZ可以作为衡量大倾角静稳性的基本标志。
自由液面对大倾角稳性的影响:在计算各倾角时的静稳性力臂或静稳性力矩值时,如初稳性计算一样,也需进行自由液面修正,即液舱内自由液面使静稳性力臂及静稳性力矩减小。
液舱内的液体随船舶倾角的增大而引起自由液面较大变化,从而引起自由液面力矩的较大变化。
静稳性曲线上特征参数的含义:静稳性曲线的主要特征体现在:1.静稳性曲线在原点处的斜率。
静稳性曲线在原点处的斜率等于初稳性高度G0M。
2. 静稳性曲线上的反曲点。
当横倾角增大至甲板浸水角时,静稳性曲线上升段出现一反曲点,在该点以前,曲线上升较快;在该点之后,曲线上升趋势减缓,反曲点处曲线斜率最大,这是因为船舶横倾至甲板浸水角前后浮心位置改变最大所决定的。
3.静稳性曲线上的极值点。
当横倾角增大至某一角度,静稳性曲线取得极值点,它标明了曲线最高点的位置,反映出船舶在横倾中所具有的最大静稳性力矩(臂),以及取得静稳性力矩(臂)最大值时船舶的倾斜状态。