基于DSP与FPGA的跟踪伺服运动控制器设计
- 格式:docx
- 大小:12.98 KB
- 文档页数:3
基于DSP+FPGA的开放式机器人运动控制器的研究共3篇基于DSP+FPGA的开放式机器人运动控制器的研究1开放式机器人运动控制器是一种专为机器人运动控制而设计的控制器,其运行在数字信号处理器(DSP)和现场可编程门阵列(FPGA)之上。
这种控制器的目的是完整控制机器人的运动,并提供精细的数据采集和处理,从而可以在进行复杂的运动控制时快速而准确地响应外界的刺激。
DSP+FPGA控制器的设计与传统机器人控制器类似,但是一些核心的结构和特征有所改变。
在DSP+FPGA控制器中,DSP主要用于实现运动控制算法、信号处理和通信控制,而FPGA则用于实现实时IO接口的数据采集及处理。
由于DSP的高效性能和FPGA的高速IO,因此该控制器可以在实时性和精度方面取得更高效的控制效果。
在DSP+FPGA控制器的设计中,需要深入了解机器人的运动学和动力学。
运动学涉及机器人的轨迹和位置控制,而动力学则涉及机器人的力学和电气特性的精确计算和控制。
因此,开发者需要掌握基本的控制算法、数学模型和信号处理技术,才能更好地设计出适应不同机器人类型和应用场景的开放式机器人控制器。
在实现DSP+FPGA开放式机器人运动控制器的过程中,需要注意以下几点:1. 高速数据采集和处理:FPGA作为实时IO接口向DSP提供高速而可靠的数据(例如机器人的位置、偏差、角度和力量数据)。
2. 快速响应和反应能力:DSP负责处理数据和运动控制算法,并通过FPGA控制机器人的开关、电机和伺服系统。
3. 多通道数据处理:DSP和FPGA需要支持多通道数据采集和处理,以实现同步的运动控制和精密的位置控制。
4. 丰富的输入和输出功能:DSP+FPGA控制器需要支持多种IO接口,例如模拟量输入、数字量输入、PWM控制、编码器反馈等,以实现对机器人的全面控制。
5. 跨平台的可移植性:DSP+FPGA控制器需要支持不同操作系统和平台,以适应各种机器人应用场景的需求。
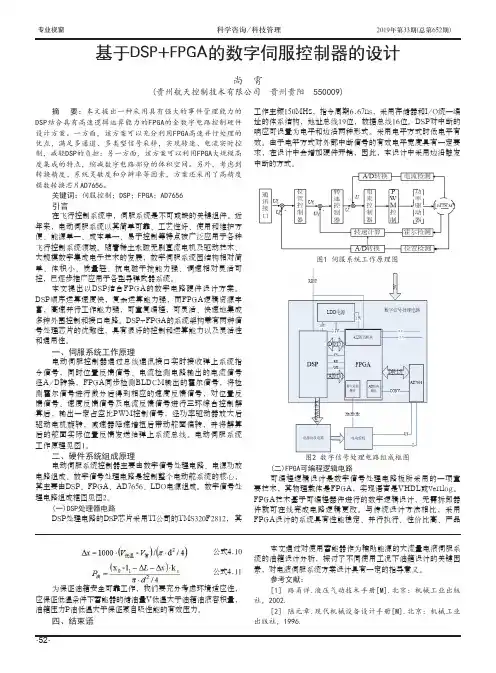
科学咨询/科技管理2019年第33期(总第652期)摘 要:本文提出一种采用具有强大的事件管理能力的DSP结合具有高速逻辑运算能力的FPGA的全数字电路控制硬件设计方案。
一方面,该方案可以充分利用FPGA高速并行处理的优点,满足多通道、多类型信号采样,实现转速、电流实时控制,减轻DSP的负担;另一方面,该方案可以利用FPGA大规模高度集成的特点,缩减数字电路部分的体积空间。
另外,考虑到转换精度、系统灵敏度和分辨率等因素,方案还采用了高精度模数转换芯片AD7656。
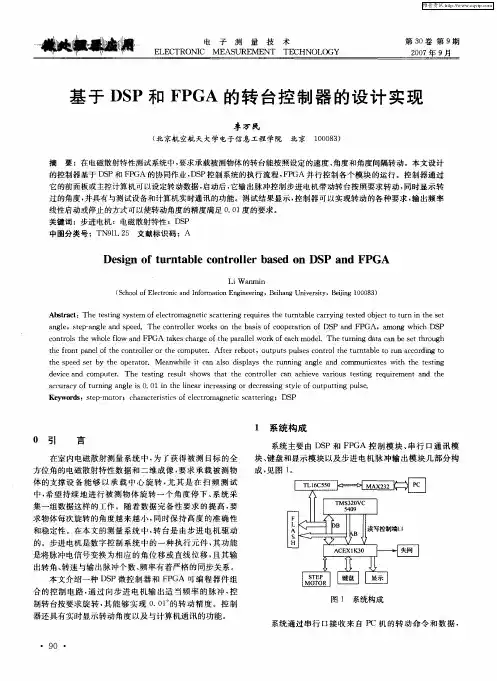
关键词:伺服控制;DSP;FPGA;AD7656引言在飞行控制系统中,伺服系统是不可或缺的关键组件。
近年来,电动伺服系统以其简单可靠、工艺性好、使用和维护方便、能源单一、成本单一、易于控制等特点被广泛应用于各种飞行控制系统领域。
随着稀土永磁无刷直流电机及驱动技术、大规模数字集成电子技术的发展,数字伺服系统因结构相对简单、体积小、质量轻、抗电磁干扰能力强、调速相对灵活可控,已逐步推广应用于各型导弹武器系统。
本文提出以DSP结合FPGA的数字电路硬件设计方案。
DSP顺序运算速度快,复杂运算能力强,而FPGA逻辑资源丰富,高速并行工作能力强,可重复编程,可灵活、快速地集成多种外围控制和接口电路。
DSP+FPGA的系统架构兼有两种信号处理芯片的优越性,具有很好的控制和运算能力以及灵活性和通用性。
一、伺服系统工作原理电动伺服控制器通过总线通讯接口实时接收弹上系统指令信号,同时位置反馈信号、电流检测电路输出的电流信号经A/D转换,FPGA同步检测BLDCM输出的霍尔信号,将检测霍尔信号进行微分后得到相应的速度反馈信号,对位置反馈信号、速度反馈信号及电流反馈信号进行三环综合控制解算后,输出一定占空比PWM控制信号,经功率驱动器放大后驱动电机旋转,减速器降速增扭后带动舵面偏转,并将解算后的舵面实际位置反馈发送给弹上系统总线。
电动伺服系统工作原理见图1。
采用 DSP+FPGA 的三轴运动控制器设计何远松;谢明红【摘要】In order to meet the demand of open CNC system,a general three-axis motion controller was designed based on TMS320F28335 floating-point digital signal processor (DSP)and EP2C8F256C6 field programmable gate array (FP-GA).The overall structure of motion controller,the design of hardware circuits,the interpolation algorithm as well as the compostion and realization of FPGA modules were introduced in details,and the relevant design software structure dia-gram was presented accordingly.The motion controller has the characteristics of simple framework,high versatility and modularization,and can well meet the real-time and the accuracy of the motion control system.%为了满足开放式数控系统的需求,设计了一种基于 TMS320F28335浮点型数字信号处理器(DSP)和EP2C8F256C6现场可编程门阵列(FPGA)的通用三轴运动控制器。
详细介绍该运动控制器的整体结构、硬件电路设计、插补算法、FPGA 各分模块的构成及实现,并给出了相关设计的软件结构框图。
基于DSP和FPGA的激光加工系统控制器的设计黄复清;林维鹏【摘要】根据激光加工系统的工作特点和要求,以DSP芯片TMS32028335作为主控制芯片,对加工数据进行运算处理,实现插补算法;以FPGA芯片EP2C8Q208C8N为辅助芯片,利用FPGA芯片中的FIFO缓存处理好的加工信息,从而更好地满足激光加工系统的实时性要求,最终实现具备多轴协调运动及对系统状态实时监控,并且可以独立于PC机运行的控制器设计。
%According to the characteristics and requests of laser-processing system,DSP chipTMS320F28335,as main control chip, is used to compute the processing data and realize the interpolation algorithm. By taking FPGA chipEP2C8Q208C8N as assistance,the processing information processed by FIFO buffer in FPGA chip EP2C8Q208C8N is utilized to meet the real-time requirements of laser-processing system. At last,the design of the controller which can execute multi-axis coordinated motion,system's real-time status monitoring and operation independent of PC was realized.【期刊名称】《现代电子技术》【年(卷),期】2014(000)011【总页数】3页(P135-137)【关键词】DSP;FPGA;FIFO;运动控制器;激光加工【作者】黄复清;林维鹏【作者单位】中国民航大学工程技术训练中心,天津 300300;中国民航大学航空自动化学院,天津 300300【正文语种】中文【中图分类】TN911.7-34;TP271在激光数控加工系统中,运动控制器的设计占据极其重要的位置,其性能的好坏影响到工件的加工质量。
基于DSP与FPGA的跟踪伺服运动控制器设计
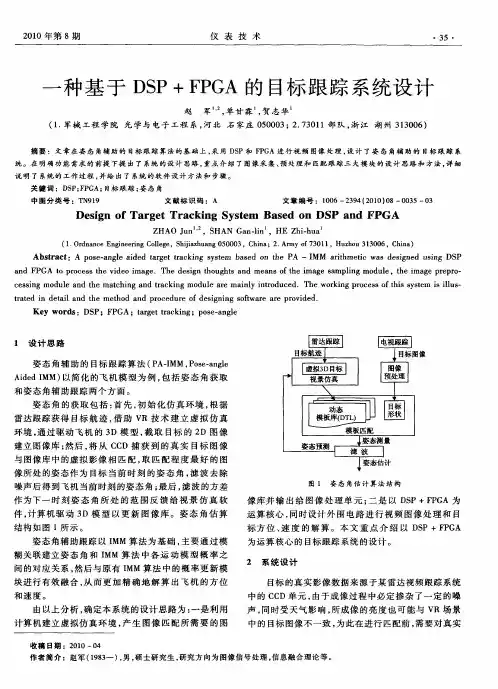
摘要:在分析光电跟踪伺服系统特点的基础上,以TI 公司DSP 芯片TMS320F2812 作为主控制芯片,采用FPGA 进行逻辑时序控制,设计了基于DSP 和FPGA 的多轴伺服运动控制器。
给出了该控制器的功能和硬件结构以及软件流程设计。
实验结果表明,该控制器具有高集成度、灵活性、实时性、
模块化的特点,完全满足了在复杂环境下对伺服系统控制的要求。
在高速光电跟踪系统中,对伺服系统的高速性、精确度和稳定性都有很
高的要求。
为了提高跟踪精度,越来越多的控制算法被应用于伺服系统中,因
此要求控制器能在很短的时间内完成大量的运算[1]。
DSP 具有较强的运算能力,而FPGA 具有高度灵活的可配置性和逻辑时序控制能力[2]。
因此在很多伺服控制器中,“DSP+FPGA”结构得到了广泛的应用。
实际应用环境一般比较复杂,有大量的信息传递,并且需要对电机转速
实行精确控制,因此对伺服控制器的多路通信能力,快速运算能力和抗干扰能
力都有较高的要求。
为了解决这一问题,提供一个较好的实验平台,本文结合
光电跟踪伺服系统的特点,提出一种以TI 公司的32 位定点数字信号处理器TMS320F2812 为核心,以Altera 公司CycloneⅡ系列FPGA 为辅助处理器结构的跟踪伺服控制器,并综合阐述了该控制器的功能、硬件设计和软件流程。
该
控制器采用单+5 V 供电,具有6 路模拟信号输入、4 路模拟信号输出、多路PWM 输出、1 路CAN 总线、2 路RS422 和1 路RS232 串行通信口,具有较强的运算能力和数据通信能力,是良好的数字控制系统实验平台。
1 总体结构设计
TMS320F2812 作为一款专为电机控制所设计的芯片,不仅具有运算速度快的特点,而且集成了丰富的片内外设资源[3]。
设计时综合考虑DSP 片上资。