2008航天器动力学20-太阳帆
- 格式:ppt
- 大小:2.79 MB
- 文档页数:72

航空航天行业的航天器动力学资料航空航天行业中的航天器动力学是研究航天器在航天环境中运动规律的重要领域。
通过对航天器的动力学特性进行研究,可以为航天器的轨道设计、動力系统控制和飞行性能评估提供重要参考。
本文将介绍航天器动力学的基本概念、数学模型和应用。
一、航天器动力学的基本概念航天器动力学主要研究航天器在外部环境作用下的运动规律。
其中,外部环境的主要影响因素包括重力、气动力、推力等。
航天器动力学的基本概念包括质量、位置、速度和加速度等。
1. 质量:航天器的质量是指航天器所含物质的总量,通常用质量单位千克(kg)表示。
2. 位置:航天器的位置是指航天器在空间中的坐标位置,可以用三维坐标系表示。
3. 速度:航天器的速度是指航天器在单位时间内所移动的距离,通常用速度单位米每秒(m/s)表示。
4. 加速度:航天器的加速度是指航天器在单位时间内速度的变化率,通常用加速度单位米每二次方秒(m/s^2)表示。
二、航天器动力学的数学模型为了研究航天器的动力学特性,需要建立相应的数学模型。
常用的数学模型包括质点模型和刚体模型。
1. 质点模型:质点模型将航天器看作一个质点,简化了问题的复杂性。
通过分析质点的质量、作用力和运动方程,可以得到航天器的运动规律。
2. 刚体模型:刚体模型将航天器看作一个刚体,考虑航天器的旋转运动。
通过分析刚体的质量、角速度和力矩,可以得到航天器的旋转方程。
三、航天器动力学的应用航天器动力学在航空航天行业有着广泛的应用。
以下是几个常见的应用领域:1. 轨道设计:航天器动力学可以用于轨道设计,通过分析航天器在外部引力和空气阻力的作用下的运动规律,确定最佳的轨道参数,以实现特定的任务要求。
2. 推力控制:航天器动力学可以用于推力控制系统的设计与优化。
通过对航天器的动力学特性进行研究,可以确定合适的推力大小和方向,实现航天器的姿态稳定和姿态控制。
3. 飞行性能评估:航天器动力学可以用于飞行性能的评估。
太阳帆航天器的关键技术胡海岩(北京理工大学宇航学院飞行器动力学与控制教育部重点实验室,北京 100081)摘要:将太阳帆航天器所涉及的关键技术划分为4个方面:总体设计、轨道和姿态动力学与控制、太阳帆材料及其性能、太阳帆折叠与展开。
针对每项关键技术,基于对国外长期研究结果进行分析并阐述主要技术特征,梳理国内相关研究进展,包括笔者与合作者的研究成果,分析存在的主要问题。
根据上述分析,指出我国发展太阳帆航天器应该重视的若干问题。
关键词:太阳帆;薄膜;折叠;展开;轨道控制;姿态控制中图分类号:V423文献标识码:A文章编号:2095-7777(2016)04-0334-11DOI:10.15982/j.issn2095-7777.2016.04.005引用格式:胡海岩. 太阳帆航天器的关键技术[J]. 深空探测学报,2016,3(4):334-344.Reference format: Hu H Y. Key technologies of solar sail spacecraft [J]. Journal of Deep Space Exploration,2016,3(4):334-344.0引言太阳帆航天器通过阳光照射在大面积薄膜上的反射光压获得飞行动力,可实现长时间、小推力的加速飞行,对深空探测颇具吸引力。
美国、苏联、欧洲很早就启动了太阳帆航天器的有关技术研究。
例如,1999年,欧洲航天局(ESA)和德国宇航中心(DLR)联合研制了边长为20 m的正方形太阳帆模型,并进行了地面模拟展开试验;2009年又进行了失重飞行条件下的太阳帆支撑桅杆模拟展开试验。
但这些研究进展并不顺利,多次在地面或飞行搭载试验中出现问题,导致计划流产。
可喜的是,日本宇宙航空研究开发机构(JAXA)坚持富有自身特色的研究计划,并取得了突破性进展。
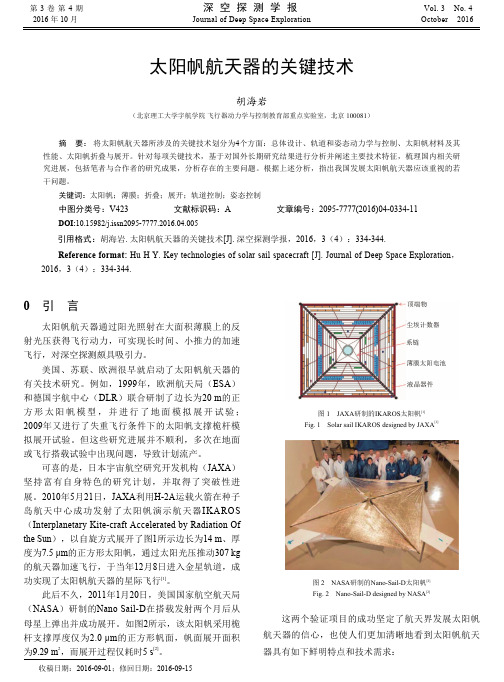
2010年5月21日,JAXA利用H-2A运载火箭在种子岛航天中心成功发射了太阳帆演示航天器IKAROS(Interplanetary Kite-craft Accelerated by Radiation Ofthe Sun),以自旋方式展开了图1所示边长为14 m、厚度为7.5 μm的正方形太阳帆,通过太阳光压推动307 kg的航天器加速飞行,于当年12月8日进入金星轨道,成功实现了太阳帆航天器的星际飞行[1]。

至学年第二学期飞行器结构动力学期末考试试题2008西北工业大学2007诚信保证本人知晓我校考场规则和违纪处分条例的有关规定,保证遵守考场本人签字:规则,诚实做人。
编号:成西北工业大学考试试题(卷)绩学年第二学期2007-2008飞行器结构动力学学时开课学院航天学院课程考试日期2008年6月考试时间小时考试形式()()卷名姓号考生班级学一、填空题(共20分)1、振动系统的固有频率,当刚度一定时,随质量的增大而________;当质量一定时,随刚度的增大而________。
2、系统的初始条件和外激励对系统的固有频率________影响。
β_________时隔振才3.对于弹簧阻尼隔振系统,不论阻尼大小,只有当频率比有效果,弹簧阻尼隔振器在低频区(相对系统固有频率)对隔振________;当频率比ββ_________;但在频率比以后,传递率曲线无穷大时,传递率趋于________βζ增大而________。
;__________ 当频率比_________时,传递率随阻尼比二、简答题(共10分)1、(5分)简述影响结构动力学分析模型的主要因素及有限元模型的常见模型。
2、(5分)简述位移展开定律。
yYωt,,前轮轴上下运动sin=飞机在跑道上降落滑行的简化模型如图三、(10分)1mkc=5880s·,阻尼系数=294kN/m已知质量N/m=2940kg,弹簧刚度,路面的y=10sin30t(激励cm)(位移),求质量上下振动的振幅。
共3页第1页图 1四、(15分)如图2所示导弹头部安装带有减振装置的仪器组件。
当垂直发射时,导弹有随时间直线增加的加速度。
其中为常数。
如果该组件质量,求发射时组件相对弹体支承板的相对位移和组件的绝对加速度时间函数。
为阻尼忽略不计。
1 仪器组件2 支承座图2 带有仪器的弹头示意图五、(20分)三个质量由两根弹性梁对称的连结在一起,可粗略作为飞机的简化模型(如图3)。

IKAROS太阳帆第一阶段展开过程的动力学行为分析
胡伟鹏;淮雨露;徐萌波;薛荣刚;邓子辰
【期刊名称】《应用力学学报》
【年(卷),期】2024(41)1
【摘要】空间结构的在轨展开涉及到复杂的高维强非线性动力学问题,这些动力学问题的建模及仿真技术是航天动力学领域的难题,也是对在轨展开过程施加控制的前提条件。
本研究以IKAROS太阳帆在轨第一阶段展开过程为例,基于哈密顿变分原理,建立中心刚体-主动伸长柔性梁耦合动力学模型;采用保结构分析方法,关注动力学系统的局部动力学行为,在恒定转矩驱动和恒定功率驱动两种工况条件下,对IKAROS太阳帆第一阶段展开过程进行仿真;发现两种工况条件下的中心刚体转动角速度演化规律差别显著,恒定转矩做功将导致中心刚体的转动稳定性变差,同时,恒定功率驱动工况下,IKAROS太阳帆第一展开阶段节能效果较好。
【总页数】6页(P100-105)
【作者】胡伟鹏;淮雨露;徐萌波;薛荣刚;邓子辰
【作者单位】西安理工大学土木建筑工程学院;北方工程设计研究院有限公司;西北工业大学力学与土木建筑学院
【正文语种】中文
【中图分类】O322
【相关文献】
1.大型太阳帆薄膜折叠及展开过程数值分析
2.太阳帆充气支撑管展开动力学分析
3.卫星太阳帆板展开的动力学仿真分析与应用
4.黏弹性薄膜太阳帆自旋展开动力学分析
5.空间望远镜层合材料镜片展开过程非线性动力学行为分析
因版权原因,仅展示原文概要,查看原文内容请购买。
重点、难点航天器姿态动力学部分第一章1. 动量矩是怎样定义的?写出其在本体坐标系的分量的表达式(两种)。
2. 写出惯量张量的一般计算表达式。
对于主轴系惯量张量的表达式是怎样的?3. 刚体动能的定义式、一般计算式和主轴系中的计算式是怎样的?4. 绕原点转动运动的基本定理及其表达式是什么?欧拉动力学方程在本体系的一般表达式怎样?,在主轴系中的表达式又怎样?5. 欧拉角(进动角,章动角,自转角)是哪两个坐标点的夹角关系?是按怎样的顺序旋转得到的?表示的几何意义是什么?6. 写出关于按313顺序定义的欧拉角的欧拉运动学方程。
7. 常质量航天动力学方程是根据什么原理建立的?在哪个坐标系上列写标量方程?写出其具体方程。
用什么方法求解该动力方程组?*8. 什么是定向性?9. 什么是稳定性?10. 根据什么原理来说明定向性,写出该定向性的数学表达式。
11. 什么情况下有定向性?说明典型的定向性情况。
12. 对自旋卫星定向性和稳定性的关系是什么?13. 写出自旋卫星稳定性的分析过程。
14. 自旋稳定有什么优缺点?15. 内能耗散系统用什么模型?16. 说明内能耗散对系统稳定性的影响。
17. 双自旋稳定方式是怎样提出来的?其根据是什么?18. 写出双自旋卫星稳定性分析的过程。
19. 双自旋稳定系统的优缺点是什么?第二章20. 环境力矩有哪些?这些力矩有什么特点?有什么作用?21. 什么是引力梯度力矩?并通过实例来解释。
22. 刚体的引力梯度矩是怎样定义的?写出其计算表达式。
说明其性质。
23. 引力梯度力矩作用下,欧拉角如何定义?引力梯度力矩如何计算?欧拉运动学方程和动力学方程如何建立?24. 如何推导姿态动力学方程的线性化方程?从线性化方程可以看出姿态运动有什么特点?25. 怎样进行引力梯度稳定系统的稳定性分析?26. 详细解释ky-kr相平面的物理定义。
27. 如何在ky-kr相平面上表示引力梯度系统的稳定性条件(稳定域)?28. 引力梯度系统有什么特点?第三章29. 说明小推力器系统控制姿态的原理。
太阳帆飞行器自适应极点配置控制方法研究作者:邱锋杨星张莹来源:《现代电子技术》2014年第02期摘要:太阳帆航天器对执行机构有着特定的要求,在此基于控制杆和偏置动量反作用飞轮展开研究,就姿态控制系统的物理模型及太阳帆的姿态动力学模型进行分析。
并针对此类模型,利用鲁棒极点配置方法设计自适应控制器及太阳帆航天器姿态控制系统,通过数值仿真研究姿态控制中的姿态纠偏。
结果表明,采用自适应鲁棒极点配置控制方法的控制系统能够使飞行器能够较快实现大角度的姿态控制要求。
关键词:飞轮;太阳帆;鲁棒极点配置;自适应控制中图分类号: TN911⁃34 文献标识码: A 文章编号: 1004⁃373X(2014)02⁃0021⁃05太阳帆是装载在航天器上、利用太阳光压驱动航天器飞行的装置。
其原理是利用太阳在大面积薄膜上的反射光压提供航天器飞行的动力。
虽然这种推力很小,但在没有空气阻力存在的太空,仍然可以为帆面面积足够的太阳帆提供持续的加速度,很容易达到和超过宇宙速度,实现星际航行[1]。
这种驱动方式的优点是绿色环保而且只要在有阳光存在的地方,它就会始终推动飞船前进乃至完成深空探测。
2005年6月21日,俄罗斯发射了Cosmos⁃1太阳帆航天器;2008年8月3日,美国用猎鹰火箭发射了纳帆D1太阳帆;日本宇宙航空研究开发机构于2010年5月21日发射了质量为315 kg的行星太阳帆——“伊卡洛斯”。
随着多个太阳帆航天器的发射以及成功部署,太阳帆技术进入了一个快速发展时期。
由于在太空中运行的太阳帆航天器自身的特点使得其姿态控制方法有别于传统空间飞行器,太阳帆航天器特点主要有:尺寸巨大,干扰力矩大,相应的转动惯量也特别大。
基于以上特点,利用传统的姿态控制方法,如喷气控制,其需要消耗大量燃料和能量,从而将导致航天器结构重量剧增,会大大降低太阳帆的飞行性能,已不适用于太阳帆的姿态控制。
国内外学者提出了多种针对太阳帆的新型姿态控制技术。
航天器用太阳帆
佚名
【期刊名称】《《军民两用技术与产品》》
【年(卷),期】2001(000)008
【总页数】1页(P35)
【正文语种】中文
【中图分类】V228
【相关文献】
1.太阳帆航天器三维人工平动点变化特性研究 [J], 段逊; 岳晓奎; 党朝辉
2.航天器太阳帆板伸展过程的自适应动态规划方法 [J], 刘波;戈新生;赵金刚
3.条带式太阳帆航天器的热致结构动力学响应 [J], 张军徽;方瑞颖;武娜;佟安;刘应华
4.航天器太阳帆板多自由度减振装置设计 [J], 朱仕尧;雷勇军;郭欣
5.空间非合作目标航天器太阳帆板识别方法研究 [J], 刘福才;张晓
因版权原因,仅展示原文概要,查看原文内容请购买。