基于PC104的时序控制系统设计
- 格式:pdf
- 大小:281.51 KB
- 文档页数:3

航空相机补偿系统检测技术的研究摘要:采用故障树分析原理对航空相机补偿板进行检测,结合相移补偿原理建立补偿板的故障树,根据像移补偿跟测试激励信号仿真技术的理论关系式实现对航空相机补偿板进行检测。
完成了检测系统硬件以及软件设计。
该检测系统可以快速有效对航空相机补偿板是否有故障进行检测、补偿系统性能分析,节省排障时间。
关键词:补偿板相移补偿故障诊断航空相机的内部设计,主要由光学系统,主控系统(集成各种板卡),机械传动机构等组成。
补偿板属于光学系统一组成部分,航空相机的成像质量是重要的功能指标,影响着相机的成像质量,航空相机在工作时自身情况,比较恶劣的环境条件以及使用维护跟人员操作会导致相机发生一些故障。
因此,对航空相机的故障诊断技术的研究就变得尤为重要[1]。
利用建立故障树模型分析方法对航空相机的电子设备出现故障状态进行的分析,为工作人员了解设备提供方便,了解航空相机电子设备里的零部件与分机间的故障关系,外界因素与航空相机电子器件之间故障关系,有利于维修保养,减少排除故障所需时间。
1 检测系统的理论基础应检测需要,先介绍航空相机的电控系统的大体工作流程,如图1。
主控系统中补偿板检测分系统检测原理如图2。
先建立补偿板的故障树模型,然后对补偿板故障树最小割集施加一定量的激励信号,对补偿板经过处理过的实际信号进行测量,最后,对实际信号输出值与计算出的理论值[2]进行对比,能比较准确的诊断出补偿板故障。
2 建立故障树模型故障树的建立是故障树分析法的关键,其完善程度跟定量计算结果准确与否有很大关系。
因此工作人员要把握各个板之间的内在联系,对影响故障途径和程度的各种因素都要事先有所了解,这样有利于在分析的过程中发现出问题,找出故障部件与板之间的关系,确定出板薄弱的环节[3]。
根据故障树整体结构,运用下行法[1]对相机的补偿系统进行分析,从事件发生顶端开始,依次向下找出割集,以此类推直到找出最小割集。
根据建立故障树的步骤[5]总结出了补偿板的故障树图3所示:根据图3可以得出航空相机补偿板故障模型:如表1:由上述关系可以看出,最小割集是X11、X12。
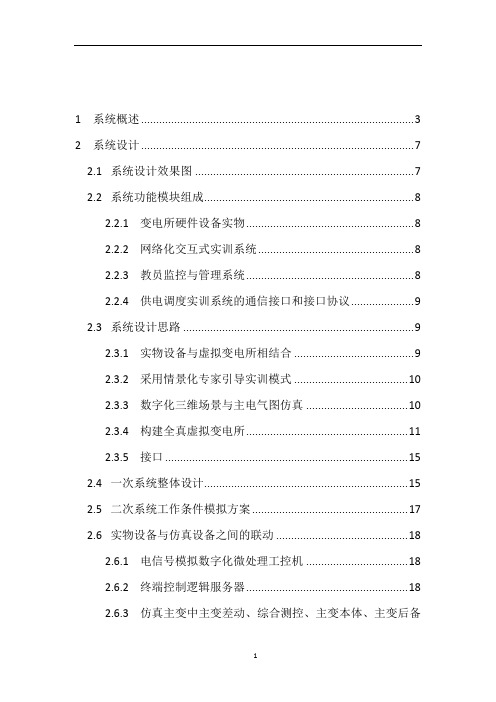
1系统概述 (3)2系统设计 (7)2.1系统设计效果图 (7)2.2系统功能模块组成 (8)2.2.1变电所硬件设备实物 (8)2.2.2网络化交互式实训系统 (8)2.2.3教员监控与管理系统 (8)2.2.4供电调度实训系统的通信接口和接口协议 (9)2.3系统设计思路 (9)2.3.1实物设备与虚拟变电所相结合 (9)2.3.2采用情景化专家引导实训模式 (10)2.3.3数字化三维场景与主电气图仿真 (10)2.3.4构建全真虚拟变电所 (11)2.3.5接口 (15)2.4一次系统整体设计 (15)2.5二次系统工作条件模拟方案 (17)2.6实物设备与仿真设备之间的联动 (18)2.6.1电信号模拟数字化微处理工控机 (18)2.6.2终端控制逻辑服务器 (18)2.6.3仿真主变中主变差动、综合测控、主变本体、主变后备182.6.4实物开关柜中智能模块 (19)2.6.5控制台服务器系统 (19)2.6.6自动化电力调度系统 (19)2.6.7电气故障模拟及诊断系统 (20)3教学培训实现 (24)3.1变电所综合自动化 (24)3.1.1系统总述 (24)3.1.2系统结构 (26)3.1.3系统功能 (26)3.1.4系统控制、监视、测量范围 (29)3.1.5电力调度中心主站系统 (30)3.1.6SCADA系统复示终端 (32)3.2网络化交互式演练系统设计方案 (38)3.2.1网络化交互式演练系统 (38)3.2.2系统概况 (40)3.2.3系统实训功能 (40)3.3教员监控与管理系统 (43)1系统概述各类实物设备按地铁变电所实际情况布置,组成一个具备实际场景和操作功能的实训变电站,从而使学生尽可能快地建立起城市轨道交通供电系统的整体概念。
采用这套完整的实训变电站系统,可以进行技能培训的内容包括:●城市轨道交通供电系统交接班、设备巡视、倒闸操作技能、高压设备停电检修作业安全技术措施设置的技能、一次事故处理的技能、电力调度技能的教学和训练。

题目与解答第一章现场总线概述1简述FCS的主要技术特点和优点是什么?(FCS名词解释见34背页)(1)现场总线系统(FCS)的技术特点:①系统的开放性。
相关标准的公开、一致性,通过现场总线构筑自动化领域的开放互连系统具备互可操作性与互用性。
不同生产厂家性能类似的设备可实现互换性。
互可操作性:实现互联设备间的信息传输;互用性:不同厂家性能类似设备可实现互换性。
②现场设备的智能化与功能自治性。
仅靠现场总线设备即可完成自动控制的基本功能,并可随时诊断设备运行状态。
包括传感测量、补偿计算、数据处理与控制等③系统的实时性与确定性。
测控任务具有严格的时序和实时性要求,否则可能造成控制系统的灾难性后果。
这也要求通信机制能够保证时间发布和数据传输的实时性。
④现场环境的适应性。
现场总线是专为生产现场环境设计的,支持多种传输介质,具有较强的抗干扰能力,满足本质安全防爆等各种环境要求。
⑤采用成熟先进技术、系统结构的高度分散性。
设备描述语言DDL、技术等。
现场总线可构成全分散性控制系统,简化了系统结构,提高了可靠性。
(2)现场总线的优点:由于现场总线具有以上突出的特点,它使控制系统从设计、安装、投运到正常生产运行以及检修维护,都体现出巨大的优越性。
①节省系统投资、安装费用和维护费用。
②设计、组态、安装、调试简便,系统维护、设备更换和系统扩充方便。
③用户具有高度的系统集成主动权,系统易于重构。
④提高了控制系统的安全性、可靠性和准确性。
⑤完善了企业信息系统,为实现企业综合自动化提供了基础。
2为什么说Fieldbus是底层控制网络Infranet(从Fieldbus的结构特点分析说明)。
(1)•现场总线将单个分散的现场设备变成网络节点,相互之间连接成可以互通信息、共同完成测量控制任务的网络控制系统。
•每个节点实际上是一个智能设备,能够独立完成从控制、检测,到运算、显示、报警等多种任务。
(2)现场总线是低层控制网络Infranet(或者3(3))• Infranet(Infrastructure Network),使工厂底层网络系统的底层现场设备之间以及生产现场与外界能够实现信息交换,满足企业综合自动化的发展需要。

9054是32位,33MHz的PCI总线接口控制器,它有三种工作模式:M、C、J模式,可与多种处理器连接,M模式是与Motorola 的MPC850或MPC860接口方式。
J模式的本地总线的数据线和地址线复用,因此都不好用,常用的是C 模式。
工作模式的选择是根据9054的MODE[1..0]管脚的配置,11是M模式,10是J模式,00是C模式。
9054的本地总线除了EEPROM接口外都是3V/5V兼容的。
本地总线最多可以跑在50MHz。
9054的数据传输方式:9054有主模式(PCI Initiate)和从模式(PCI Target)两种方式,主模式是由本地总线发起读写的控制信号。
从模式是由计算机发起读写控制信号对本地总线进行IO或内存读写。
我主要采用从模式对本地总线访问。
9054有三种数据读写方式:单个读写,突发读写,DMA 读写。
PCI卡设计的注意事项:3.32位接口信号最大走线长度1500mil4.clk走线长度2.5in+0.1in,且只能连一个负载。
5.pc104plus中,有多路时钟,REQ和GNT信号9054的机理:9054在计算机上电时,从EEPROM接口读写配置信息,根据配置信息动态配置计算机的资源。
主要配置的信息有IO读写方式,内存读写方式,本地总线的起始地址和空间范围。
此外,根据需要还可对DMA,中断进行配置。
EEPROM的DID(0h)和VID(2h)是非常重要的,系统上电后就靠它们识别PCI适配卡,并安装相应的驱动。
在EEPROM里,一般可以配置的本地地址空间有两个:Space 0 和Space 1。
相关寄存器有LAS0RR,LAS0BA,LAS1RR,LAS1BA。
还有一个与从模式下接口性质有关的寄存器LBRD0,LBRD1。
配置它主要是配置本地总线的数据总线宽度,是8位,还是16或32位。
在本应用程序里,通过调用驱动提供的函数,对设备进行打开和数据读写操作,还实现了DMA中断和本地中断的响应。
基于WinCE的计算器设计【摘要】计算器(calculator)大家已经很不陌生了吧,我们的日常生活之中在计算一些东西的时候都离不开它了,计算器分为普通计算器(进行一些简单的加、减、乘、除)和科学计算器(进行一些复杂的运算)。
计算器是能进行数学运算的手持机器,拥有集成电路芯片,但结构简单,可广泛运用于商业交易中,是必备的办公用品之一。
嵌入式计算器用途广泛,可以应用到PDA、手机等多个领域。
目前,嵌入式计算器已被广大用户所使用,给越来越多的人提供了便利,它做用到的嵌入式技术更是正逐渐的走向成熟。
本课题是在嵌入式操作系统Windows CE下,实现对嵌入式计算器的设计。
本设计最终实现了在嵌入式操作系统Windows CE中的嵌入式计算器的功能。
通过调试,成功实现了基本运算以及科学计算的功能。
设计的计算器不仅可以进行简单的四则运算(加、减、乘、除运算),还可以进行简单的科学计算(开方、平方、正弦、余弦、Tan的运算),可以保存上一次所计算的结果, C 表示初始化,界面主是Windwos Form 窗体结构,后台为C#代码,可用鼠标按键输入,也可用键盘输入,设计主要采用的Windows 。
【关键词】嵌入式系统;计算器;Windows CE;Windows窗体The design of Calculator based on WinCE 【Abstract】Calculator (calculator) everybody already very not unfamiliar right, our daily life in the calculation of some things are inseparable from it, calculator is divided into ordinary calculator (for some simple addition, subtraction, multiplication, and division) and scientific calculator (for some complex operation). Calculator is can mathematical operation, hand-held machine with IC chip, but simple structure, and can be widely used for business transactions, is one of the necessary office supplies. calculator has a wide range of uses, it can be applied to PDA, cell phone and other fields. At present, the embedded calculator has been used by the majority of users, and provides convenience for more and more people, embedded technology whitch it used is being gradually more and more mature. Embedded technology is referred to as embedded computer technology, since it has the specialty of small size, low power consumption, easy to carry, it has been applied to our production in many areas of life.This topic is in the embedded Windows CE operating system, to realize the design of embedded design realized the function of the embedded caculator whitch is in the Windows CE embedded operating system. Through the debugging, the calculator realized the basic computing functions, as well as scientific designed the simple calculator can not only four operations (add, subtract, multiply and divide operation), and simple operation of the scientific computing (root, square, sine, cosine, log and ln operation), can save the last time that the calculation result of initialization, CE said Lord is Form Windwos, interface for c #, backstage Form structure, can use the mouse button input code, usable also keyboard input, design mainly adopts the Form and the Windows.【Key Words】Embedded system; Calculator; Windows CE; Windows From;目录第1章绪论 0嵌入式计算机技术0移动智能手机平台及软件的应用1主要工作内容 2本次设计的目标 (2)论文内容 (3)第2章嵌入式系统 (4)嵌入式系统的介绍4嵌入式系统的定义及特点 (4)嵌入式系统的发展及前景 (6)WinCE系统的介绍 7Windows Mobile智能手机平台9开发环境的搭建10visual studio 2005 (10)c#语言 (11)Visual Studio 2005中建立WinCE环境 (12)Windows Mobile SDK (12)如何申请成为微软开发者12 (13) (13)第3章WinCE计算器的设计 (14)嵌入式WinCE计算器功能概述14主要功能的介绍14计算器 (15)单位换算 (17)汇率换算 (19)第4章系统实现与测试 (20)WinCE计算器的实现20WinCE计算器窗口实现 (20)计算器的实现 (20)单位换算的实现 (24)汇率换算的实现 (24)WinCE计算器的功能测试 25计算器的测试 (26)单位换算的测试 (28)汇率换算的测试 (29)结论 (31)参考文献 (32)附录 (33)致谢 (36)第1章绪论嵌入式计算机技术目前嵌入式系统技术已经成为了最热门的技术之一,吸引了大批的优秀人才投入其中。
激光振镜运动控制器(GE-200-SV-SCAN)激光振镜运动控制器是一款有针对性的运动控制器,其最大特点就是将振镜控制、激光控制和运动控制有机的结合起来,具有较好的高频和高效率特性。
激光振镜运动控制器的开发主要面向提出控制振镜电机的特殊要求的用户群。
基于该控制器,无需增加别的硬件就可以在一台机器上同时完成振镜的打标和轨迹切割功能。
运动控制功能两轴联动的连续轨迹插补运动。
运动暂停、停止、恢复。
支持缓冲区运动和立即运动。
限位触发时自动停止运动。
控制周期为200μs,用于管理速度规划,与插补精度无关。
硬件捕获原点和编码器Index信号,高速位置锁存,具有良好的重复定位精度。
直线插补的脉冲输出频率可稳定工作在256KHz。
圆弧插补的脉冲输出频率可达到160KHz,径向误差在±0.5pulse之内。
用户可通过命令取消运动控制器对报警信号和限位信号的管理。
底层循环程序缓冲区(8K)存储用户运动信息,提高通讯效率。
用户可编程坐标偏移,便于缓冲区运动方式下,坐标的重新建立。
两轴脉冲输出,或两路振镜输出,输出方式可选择。
提供电机运动延时,时间单位为200μs。
振镜控制功能模拟量输出只针对振镜输出,提供两轴联动插补运动:u模拟电压信号与位置成一定关系,通过特定的误差修正表,产生XY坐标系相应坐标位置下对应的模拟电压输出值,或者以线性比例关系输出DA值。
当系统(振镜)的工作速度为最高速度10000mm/s时,最高分辨率为0.04mm。
u模拟电压信号的刷新周期≤30μs。
u可通过软件实现各轴输出方式的切换,即联动轴可以是两个脉冲输出的电机轴,或两个振镜输出,或一个电机轴一个振镜(轴)。
利用通用IO 0口的探针捕获功能,结合振镜运动,可实现飞行打标功能,支持模拟飞行打标和带编码器反馈的飞行打标两种方式。
本激光振镜控制器提供两种方式和振镜驱动器接口,一种是模拟电压方式,一种是兼容XY2-100协议。
对于振镜控制,提供缓冲区模式下的运动延时,时间单位为10μs。
第37卷 、,0l-37 第1期 NO.1 计算机工程
Computer Engineering 2011年1月
January 201 1
・工程应用技术与实现・ 文章编号;1000-__3428(20l1)ol—0251—o3 文献标识码;A 中圈分类号:TP393 基于PC104的时序控制系统设计 张蓉,邓浩,王磊 (中国工程物理研究院应用电子学研究所,四川绵阳621900) 摘要:结合上位计算机和下位PC104嵌入式控制器,实现一种以PC104为核心的时序控制系统设计。在该设计中,下位PC104嵌入式 控制器以黑箱模式工作,完成实时性要求较高的时序控制任务,上位计算机经由以太网与控制器进行通信,完成整个系统的远程监控。应 用结果表明,该系统具有实时性高、可靠性高、配置灵活、功能重构性强的特点,能为各子系统提供安全可靠的时序控制。 关健词:PC104嵌入式控制器;时序控制系统;功能模块;网络通信
Design 0f Time,sequence Control System Based 0n PC 104 ZHANG Rong,DENG Hao,WANG Lei (Institute of Applied Electronics,China Academy of Engineering Physics,Mianyang 621900,China) [Abstract]This paper implements a design of time—sequence control system based on PC104 by using below PC104 embedded controller in combination with an upper industrial computer.In the design,PC104 controller works black—box mode to finish the time—sequence task which has higher real—time demand.Ethernet communication is applied between the upper computer and the PC104 controller,and remote monitor is achieved by the upper computer.Application results show that this system has the features of high reliability,high real—time,flexible configuration and strong function restructure,and it can provide reliable time—sequence control for sub—system. [Key words]PC104 embedded controller;time—sequence control system;function module;network communication
DOI:10.3969/j.issn.1000—3428.2011.01.087
1概述 时序控制系统用于某实验过程中多个子系统,设备的时 序控制,确保各子系统协调一致工作,对于实验的顺利完成 有重要作用。控制系统必须保证一定的实时性、高可靠性和 稳定性。PC104系统作为嵌入式PC的一种,在软件和硬件 上与标准的PC体系结构完全兼容。它具有体积小、功能强、 可靠性高等特点,模块间采用自堆叠方式安装,便于灵活搭 配以适应不同的功能要求,被广泛应用于各个领域 。J。本文 介绍的基于PC104的时序控制系统,采用上位计算机和 PC104嵌入式控制器相结合的方式实现,既满足了时序控制 的实时性要求,又能给用户提供良好的人机界面。该系统已 成功应用于实践中,为各子系统,设备提供安全可靠的时序 控制。
2系统要求 系统的主要功能和要求为: (1)满足各子系统/设备不同接口信号的接入和输出需求, 包括CAN总线接口、专用电缆接口信号。 (2)完成各种工作模式下的时序控制,确保各子系统/设备 按时序协调一致地工作。 (3)完成异常情况下的时序处理并给予警示。 (4)对时序控制流程和各子系统/设备的状态进行监视。 (5)记录时序控制流程及状态信号。 (6)控制指令响应时间不大于10 ms。 (7)控制系统不单独占用监控显示器。 .
3系统总体结构 系统采用上位机(监测计算机)和下位机相接合的方式, 其总体结构I4 如图1所示。系统总体结构分为3层:监控管 理层,控制层,被控系统,设备。监控管理层为系统的最高层
次,是一台计算机(称为上位机),经由以太网与控制层通信, 完成系统的监控管理,给用户提供良好的人机交互界面,使 其及时观察到控制系统的运行状态,必要时下发查询或控制 指令。控制层直接与被控系统,设备连接,是系统功能实现的 核心,由PC104嵌入式处理器实现,主要完成采集处理、时 序控制等实时性要求较高的任务,无用户交互界面。被控系 设备则响应控制层的指令动作,并把必要的信息反馈给控制层。
l… Pc104控制器(下位机)
圈1时序控■系统总体结构 4系统硬件设计 系统的上位机是计算机,下位机是PC104控制器。PC104 控制器采用模块化结构设计,一般由CPU模块和接口模块组 成。接口模块主要与子系统,设备的接口类型、输入输出信号 的数量、电气特性以及系统间信号的隔离需求有关。根据系 统的功能、接口要求和实现的技术路线,控制器的硬件接口 需求见表1。 表1下位机时序控1_硬件接口膏求
作者倚介:张蓉(1972一),女,高级工程师,主研方向:自动化测 试,时序控制;邓浩,助理研究员;王磊,研究员 收藕日期:2010-06—19 E-mail:zr2614@sina.com 252 计算机工程 2011年1月5日 由表1的需求分析可知,控制器的硬件模块包括CPU模 块、CAN模块、I/O模块、继电器模块,各模块问通过PC104 总线以迭接插针方式相连,单个模块的尺寸为96 mmx90 mm, PC104控制器结构如图2所示。
CAN接 口
1/O接口 光电隔离输入 大功率负载
圈2 PC104控制器结构 4.1 CPU模块 CPU模块为控制器的核心模块,是嵌入操作系统和时序 控制软件的硬件平台。模块选择综合考虑性能、功耗、可靠 性,采用低功耗的AMD Geode LX800 CPU,板上所有芯片 均采用焊接固定方式,包括256 MB表贴内存。具有2个串 口、1个并IJ、1个10 M/IO0 M以太网口、PS2鼠标键盘接 El、支持VGA/LCD显示接口等。模块典型功耗为5 V/8 W, 平均故障间隔时间(Mean Time Between Failure,MTBF)不小 于2x105 h。在系统开发阶段,PC104控制器通过VGA 171、 PS2口连接显示器和鼠标键盘,以便于对定制的操作系统和 开发的控制软件调试,研制完成后控制器不再需要显示器和 鼠标键盘,以黑箱模式工作,各种信息通过以太网传输给上 位机进行远程监控。 4.2 CAN模块 CAN模块具有2个独立的CAN总线通道,直接存储器 映射,可高速访问CAN控制器,控制器采用SJA1000,具有 1000VDC的光隔离保护。其功能是实现CAN总线接口,在 系统中传输CAN控制指令并接收返回的阀门动作信息如开/ 关正常、异常、异常信息码及阀门开关的时间。 4.3 I/O模块 I/O模块具有48通道数字I/O,支持3个中断,其输入、 输出通道可编程设置,比较灵活。其功能是实现5 V开关量 的输入、输出。 4.4继电器模块 继电器模块具有20路光电隔离输入,20路继电器输出。 其功能是实现电压较高的(如24 V)或有隔离需求的开关量输 入及驱动大电流控制的负载。具有驱动能力强、使用灵活(输 出电平取决于继电器触点端所接的电源)、便于实现隔离的 特点。 5系统软件设计 5.1软件结构 根据系统完成的功能和系统设计要点,把系统的软件分 为两大部分:上位机监控软件和下位机时序控制软件。其总 体结构如图3所示。上位机软件作为一个模块嵌入到状态监 测软件(完成若干系统的监测)中,完成实时性要求不高的工 作任务,主要包括任务与指令的下发、状态(包括时序流程) 的实时显示、故障报警、数据存储及与下位机和相关计算机 的网络通信。下位机软件装载在嵌入式处理器中,完成实时 性较高的工作任务,主要包括任务接收与设置、数据采集(包 括操控台按键信息扫描和阀门状态信息)、时序控制、故障处 理、CAN通信以及与上位机的网络通信。 系统软件 系统管理与监控 (上位机任务) 控制程序 下位机任务 萎 图3软件的总体结构 5.2软件开发环境 上位机软件的开发工具为VC++6.0。下位机是嵌入式操 作系统,采用WinCE操作系统,下位机应用程序的开发工具 为Embedded Vc++。WinCE嵌入式操作系统根据系统的硬件 平台及功能需求进行定制。 5.3下位机软件的设计 系统总的设计思路是下位机以黑箱模式工作,尽可能简 化功能,并减少对上位机的依赖,增强系统的可靠性。因此, 下位机的软件仅考虑与时序控制紧密相关的任务,去除了繁 杂的界面显示工作。在定制操作系统时把时序控制程序定制 为开机自启动,即操作系统加载完毕,自动运行应用程序。 下位机软件采用模块化设计,完成的主要功能有: (1)初始化。完成CAN口,网络端口,I/O I:l及变量的初 始化工作。 (2)任务接收与设置。下位机初始化后有默认的任务参 数,也可根据需要通过上位机或操控台硬件按钮进行设置, 系统设计时把控制参数进行分类,一些关键控制参数由操控 台按扭进行设置,另一些参数则由上位机通过网络发送。 (3)数据采集。完成开关量输入信号包括操控台按键信息 的采集。对重要的信号以中断方式响应,一般的信号采用定 时查询方式采集。 (4)时序控制。该模块是下位机软件的核心模块,实现系 统各种工作模式下的时序控制,确保各子系统,设备按既定的 时序协调一致工作。整个时序控制既要保证系统运行的成功 率,又要避免异常其况下对各子系统,设备的损害,需要针对 各种工作模式考虑多种因素,程序具有较强的逻辑性。程序 中对关键指令信号和状态信号进行自锁和互锁,以确保控制 时序按既定的逻辑关系和时间顺序建立的流程运行。 (5)故障处理。故障包括CAN总线接收的阀门故障信息 和子系统故障信息以及专用电缆接收的子系统故障信息。软 件接收到这些信息后对其分类,并根据时序控制流程的不同 阶段进行相应处理,终止时序或继续进行。其中,专用电缆 传输的故障优先级别最高。 (6)CAN通信。完成CAN总线通信,包括CAN发送模 块和接收模块。CAN接收模块采用事件触发的发式接收,及 时接收总线上的数据。尽管CAN总线协议采用的是短帧结 构 J,每一帧的有效字节数最大为8,但各节点阀门动作数据 包有可能同时发送,为避免丢包,程序设置了接收缓冲区。 控制程序调用CAN发送模块向相关子系统,设备发出CAN指 令,并在某阀门打开时送出若干同步信号触发各子系统的同 步采集。 (7)网络通信。网络通信模块是上位机与下位机之间的信 息传输纽带。接收上位机下发的任务包和指令,上传下位机 的信息包括接阀门信息、故障信息、操控台按键信息及向子