最新基于labview的控制系统仿真(毕业设计)
- 格式:doc
- 大小:2.86 MB
- 文档页数:75
![毕业设计-基于labview的虚拟仪器设计实验[管理资料]](https://uimg.taocdn.com/4c08ed2376eeaeaad0f330e0.webp)
基于LabVIEW的虚拟仪器设计实验摘要:随着电子技术、计算机技术的高速发展及其在电子测量技术与仪器领域中的应用,新的测试理论、方法以及新的仪器结构不断出现,虚拟仪器也随之出现并得到了很大的发展。
目前在这一领域内,使用较为广泛的计算机语言是美国NI公司的LabVIEW。
LabVIEW(Laboratory Virtual instrument Engineering Workbench)是一种图形化的编程语言开发环境,LabVIEW也是一种通用编程系统,具有各种各样、功能强大的函数库,包括数据采集、GPIB、串行仪器控制、数据分析、数据显示及数据存储,甚至还有目前十分热门的网络功能,是一个功能强大且灵活的软件。
LabVIEW也有完善的仿真、调试工具,如设置断点、单步等,其动态连续跟踪方式,可以连续、动态地观察程序中的数据及其变化情况,并且LabVIEW与其它计算机语言相比,有一个特别重要的不同点:其它计算机语言都是采用基于文本的语言产生代码行,而LabVIEW采用图形化编程语言--G语言。
关键词 LabVIEW软件虚拟仪器实验设计Abstract: With the electronic technology, computer technology's rapid development in electronic measurement and instrument field of application of testing new theories,Virtual instrument has emerged and obtained very big development.Now in this field,Using a wide range of computer language is the NI company bVIEW is a kind of graphical programming language,of the development bVIEWalso is a kind of common programming system,With various and powerful function,Including data acquisition, GPIB,Serial instrumen t control,Data analysis,Data display and data storage,Even now very popular network function,Is a powerful and flexible software.LabVIEW also have simulation and Debugging tools.If set breakpoint and Single-step etc.The dynamic continuosly,Can continuously and dynamic observations of the data and programs.And with other computer language LabVIEW have a particularly important difference: Other computer language is based on the text of the language code, but LabVIEW using graphical programming language - G language. Keywords: LabVIEW Software Virtual instrument Experiment目录引言 (4) (4).虚拟仪器概念 (4).虚拟仪器的特点 (4).虚拟仪器的分类 (5).虚拟仪器的软件开发环境 (5) (5).LabVIEW概述 (5).LabVIEW的使用 (6)3.LabVIEW虚拟仪器实验 (7).一个虚拟温度报警器 (7).此实验的前面板设置 (7).此实验的程序框设置 (7).结果演示 (13).一个虚拟示波器 (14).前面板设置 (14).函数程序框图 (19).演示结果 (21).一个虚拟滤波器 (23).前面板设置 (23) (23).运行结果: (25)结束语 (26)参考文献 (27)引言虚拟仪器是基于计算机的软硬件测试平台,它可代替传统的测量仪器,如示波器,逻辑分析仪,信号发生器,频谱分析仪等;可集成于自动控制,工业控制系统;可自由构建成专有仪器系统。
利用LabVIEW进行控制系统设计与实现控制系统是一种能够监测和调节设备、过程或系统运行状态的系统。
在实际工程中,利用计算机软件进行控制系统设计与实现已经成为一种常见的做法。
本文将介绍如何利用LabVIEW进行控制系统的设计与实现,以及一些相关的注意事项。
一、LabVIEW简介LabVIEW是一种用于设计和实现各种系统、过程和设备的图形化编程软件。
它的独特之处在于采用了图形化的编程语言G语言,使编写程序更加直观和易于理解。
LabVIEW适用于各种不同的行业和领域,如工业自动化、测量仪器、控制系统等。
二、LabVIEW的基本操作在使用LabVIEW进行控制系统设计前,我们先来了解一些LabVIEW的基本操作。
LabVIEW的界面分为两部分,左侧是工具箱,包含各种控件和函数;右侧是前面板,用于搭建程序的用户界面。
通过拖拽工具箱中的控件和函数,我们可以在前面板上搭建控制系统的用户界面。
然后,我们可以使用图形化编程语言G语言来编写程序的逻辑部分,对控件和函数进行数据处理和控制。
最后,我们可以运行程序进行测试和验证。
三、控制系统设计与实现步骤1. 确定系统需求在进行控制系统设计前,我们首先需要明确系统的需求。
例如,需要实现的功能是什么,需要控制的设备是什么,需要采集的传感器数据是什么等等。
只有明确了系统的需求,才能在LabVIEW中进行相应的设计和实现。
2. 构建界面在LabVIEW的前面板上,我们可以将需要控制的设备和传感器等通过拖拽控件的方式放置在界面上,用于用户交互。
例如,我们可以添加按钮用于开关控制,添加指示灯用于状态显示,添加图表用于数据可视化等等。
通过合理的界面设计,可以提高用户的使用体验。
3. 编写程序逻辑在LabVIEW的编程界面上,我们可以使用G语言进行程序逻辑的编写。
通过将拖拽的控件和函数进行连接和配置,实现数据的输入、处理和输出。
例如,我们可以使用while循环来不断读取传感器数据,使用条件语句来实现控制逻辑等等。
LabVIEW中的控制系统设计和调试LabVIEW是一款强大的图形化编程环境,被广泛应用于各种控制系统的设计和调试。
本文将介绍使用LabVIEW进行控制系统设计和调试的基本步骤和注意事项。
一、LabVIEW简介LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是由美国国家仪器公司(National Instruments)开发的一种图形化编程语言和开发环境。
它以直观、易用的方式帮助工程师们完成各种测试、测量、控制和数据采集等任务。
LabVIEW具有丰富的功能模块和强大的图形化编程能力,使得其在控制系统设计和调试方面具有独特的优势。
二、控制系统设计步骤1. 系统建模与仿真在LabVIEW中,第一步是对待设计的控制系统进行建模和仿真。
LabVIEW提供了许多工具和模块,可以轻松地搭建系统的模型,并进行仿真分析。
可以使用Block Diagram来搭建系统框图,使用MathScript Module进行数学建模,使用Simulation模块进行系统仿真。
2. 控制算法设计控制算法是控制系统中的核心部分。
LabVIEW提供了丰富的控制算法模块和函数,可以帮助工程师们快速地设计和实现各种控制算法。
可以使用PID Control模块进行比例、积分和微分控制,使用State-Space模块进行状态空间控制,使用Fuzzy Logic模块进行模糊控制等。
3. 硬件连接与数据采集在控制系统设计中,需要将LabVIEW和硬件设备进行连接,并进行数据采集。
LabVIEW支持多种硬件接口和通信协议,可以与各种传感器、执行器和控制器进行无缝连接。
可以使用Data Acquisition模块进行数据采集,使用Instrument Control模块进行仪器控制。
4. 界面设计与人机交互控制系统通常需要一个友好的界面来展示系统状态和参数,并与用户进行交互。
摘要汽车稳定性控制系统通过控制驱动轮滑转状态改善车辆在软弱附着路面的牵引性和操纵稳定性,汽车电控系统开发的实质是进行车辆控制原型及执行器间的性能匹配,但单纯计算机仿真难以完成这一任务。
随着相关技术的成熟,硬件在环仿真以其开发周期短、成本低和接近实际情况正成为汽车电控系统开发的主要研究手段。
本文主要研究利用LabVIEW软件模拟捷达车的稳定性控制系统中的控制器,通过用LabVIEW软件的编程和控制算法来实现对车轮的制动压力的分配以及完成对控制器硬件的检测任务。
试验台主要是把计算机和硬件,如:传感器,执行器连接到一起,形成一个完整的汽车稳定性控制系统。
基于LabVIEW软件平台建立了车辆驱动稳定性控制硬件在环仿真平台,通过该平台进行了控制器硬件在环仿真实验。
实验结果表明了控制器能够稳定工作,控制算法可以有效控制驱动轮的滑转,显著改善车辆的起步加速性能,为实车试验以及电控单元的进一步开发打下了基础。
关键词:稳定性;策略;仿真;侧偏角;横摆角速度ABSTRACTVehicle stability control system to switch the state by controlling the drive roller in the weak attachment to improve vehicle traction and road handling and stability, development of automotive electronic control system is essentially a prototype of the vehicle control and performance matching between the actuator, but the simple computer simulation is difficult to To accomplish this task. With the maturity of relevant technologies, hardware in loop simulation in its development cycle is short, low cost and close to the actual situation is the development of automotive electronic control system, the main research tool.This paper studies the use LabVIEW software to simulate the Jetta cars stability control system controller, through the use of LabVIEW software, programming and control algorithms to realize the wheel brake pressure distribution and the completion of the controller hardware detection task. Test stand is mainly to computers and hardware, such as: sensors, actuators connected together to form a complete vehicle stability control system.LabVIEW software platform based on the establishment of a vehicle driving stability control hardware in the loop simulation platform, through the platform of the controller hardware in the loop simulation. The results Biaoming the controller stability, control algorithm Keyiyouxiao driving wheel of the slip control significantly improve the Ju Liang's start Jiasuxingneng, for the Shi vehicle testing and electrical units and lay the foundation of Jin Yibu development.Keywords:Stability; Strategy; Simulation; Slip Angle; Yaw Rate目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 概述 (1)1.2 汽车稳定性控制系统硬件在环仿真试验台的国内外研究现状 (1)1.2.1国外研究现状 (1)1.2.2国内研究现状 (2)1.3 研究汽车稳定性控制系统硬件在环仿真实验台的目的和意义 (3)1.4汽车稳定性控制系统硬件在环仿真试验台的核心问题及研究热点 (4)1.5 汽车稳定性控制系统硬件在环仿真试验台的发展前景 (4)第2章试验台的组成和原理及控制策略 (6)2.1 汽车稳定性控制硬件在环仿真试验台的组成 (6)2.2 汽车稳定性控制系统的理论基础与工作原理 (6)2.2.1 汽车稳定性控制系统的理论基础 (6)2.2.2 汽车稳定性控制系统的工作原理 (7)2.3 汽车稳定性控制系统的控制策略 (7)2.3.1 过度转向时的控制措施 (7)2.3.2不足转向时的控制措施 (8)2.4 本章小结 (8)第3章汽车稳定性控制系统的控制算法 (9)3.1 汽车失稳的原因 (9)3.2 横摆角速度对汽车稳定性的影响 (9)3.3 推导理想二自由度的汽车模型 (10)3.4 车辆稳定性控制理想目标的确定 (12)3.4.1 理想横摆角速度的计算 (12)3.4.2 理想质心侧偏角的计算 (12)3.5控制算法 (14)3.6 本章小结 (14)第4章汽车稳定性控制系统硬件在环仿真试验台硬件设计 (15)4.1硬件系统 (15)4.1.1 计算机 (15)4.1.2传感器及执行器 (16)4.1.3 采集卡 (18)4.2 本章小结 (20)第5章ESP硬件在环仿真试验台软件设计 (21)5.1 LabVIEW软件介绍 (21)5.1.1软件简介 (21)5.1.2主要特点 (21)5.2 ESP系统软件设计 (26)5.2.1 系统软件框图 (26)5.3本章小结 (26)第6章汽车稳定性控制系统仿真分析 (27)6.1 ESP系统仿真试验台 (27)6.2捷达汽车动力学模型的基本参数 (27)6.3汽车稳定性控制系统控制算法的验证 (28)6.4 进行仿真试验 (28)6.5 仿真结果 (31)结论 (32)参考文献 (34)致谢 (35)附录A 外文文献 (36)附录B 外文文献的中文译文 (42)第1章绪论1.1 概述汽车电子稳定程序控制系统又称为汽车稳定性控制系统,英文缩写为ESP(Electronic Stability Progrom),但车型不同,其缩写有所不同。
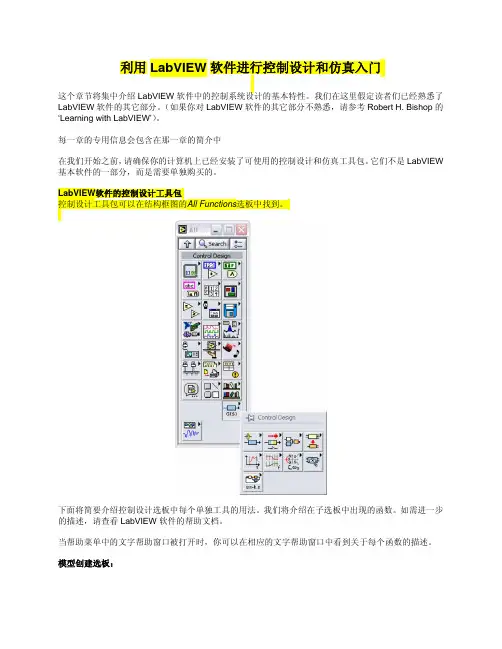
利用LabVIEW软件进行控制设计和仿真入门这个章节将集中介绍LabVIEW软件中的控制系统设计的基本特性。
我们在这里假定读者们已经熟悉了LabVIEW软件的其它部分。
(如果你对LabVIEW软件的其它部分不熟悉,请参考Robert H. Bishop的‘Learning with LabVIEW’)。
每一章的专用信息会包含在那一章的简介中在我们开始之前,请确保你的计算机上已经安装了可使用的控制设计和仿真工具包。
它们不是LabVIEW 基本软件的一部分,而是需要单独购买的。
LabVIEW软件的控制设计工具包控制设计工具包可以在结构框图的All Functions选板中找到。
下面将简要介绍控制设计选板中每个单独工具的用法。
我们将介绍在子选板中出现的函数。
如需进一步的描述,请查看LabVIEW软件的帮助文档。
当帮助菜单中的文字帮助窗口被打开时,你可以在相应的文字帮助窗口中看到关于每个函数的描述。
模型创建选板:这节中的函数用于创建各种类型的模型,例如状态空间模型、传递函数模型和零点/极点/增益模型等。
下面将讨论创建状态空间模型和创建传递函数模型函数。
控制设计工具包中的创建状态空间模型函数的端子如上图所示。
如果采样间隔端子没有连接,那么系统被默认为是连续采样。
将一个值连到采样间隔端子上会使系统变为离散系统,它使用给定的时间作为采样间隔。
状态空间模型的A、B、C、D 矩阵都有对应的端子。
一旦LabVIEW软件创建了状态空间模型(其输出端子可用),该模型就可以用于其它函数并且可以转化成其它的形式,在这一节里我们将进行更加深入的讨论。
下面就是创建状态空间模型的一个例子。
它的输出端可以连接到控制设计工具包中很多其它函数上,作为它们的输入端。
输入端子既可以是常数(在结构框图中),也可以是控制量(在前面板中)。
为了使这个手册更容易理解,我们演示的大多数例子都是在结构图中使用常数,但是,使用前面板上的控制量时常会使效率更高。
毕业设计(论文)题目基于labview的交通灯系统设计毕业设计(论文)原创性声明本人郑重声明:所提交的毕业设计(论文),是本人在导师指导下,独立进行研究工作所取得的成果。
除文中已注明引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写过的作品成果。
对本研究做出过重要贡献的个人和集体,均已在文中以明确方式标明并表示了谢意。
论文作者签名:日期:年月日摘要随着社会的发展社会节奏越来越快,人类代步工具也越来越多,经常发生交通拥堵和交通事故。
在大城市人流量的增多更加增加了交通负荷经常发生交通事故。
城市高速道路建设完成的初期,它们也曾有效地改善了交通状况。
然而,随着交通量的快速增长和缺乏对高速道路的系统研究和控制,高速道路没有充分发挥出预期的作用。
而城市高速道路在构造上的特点,也决定了城市高速道路的交通状况必然受高速道路与普通道路耦合处交通状况的制约。
因此,开发一套能够社会服务的交通灯控制器将是非常必要和及时的。
有童谣“红灯停,绿灯行,黄灯亮了等一等”由此可见交通信号灯对交通安全的重要性。
实现十字路口信号灯控制系统的方法有很多,可以通过可编程控制器PLC、单片机、标准逻辑器件等方案实现。
但是这些控制方法的功能修改及调试都需要硬件电路的支持,在一定程度上增加了设计难度,提高了设计成本。
虚拟仪器技术就是利用高性能的模块化硬件,结合高效灵活的软件来完成各种测试、测量和自动化的应用。
自1986年问世以来,世界各国的工程师和科学家们都已将NI LabVIEW 图形化开发工具用于产品设计周期的各个环节,从而改善了产品质量、缩短了产品投放市场的时间,并提高了产品开发和生产效率。
使用集成化的虚拟仪器环境与现实世界的信号相连,分析数据以获取实用信息,共享信息成果,有助于在较大范围内提高生产效率。
虚拟仪器提供的各种工具能满足我们任何项目需要。
美国国家仪器公司NI(National Instruments)最早提出的虚拟测量仪器(VI)概念,引发了传统仪器领域的一场重大变革,使得计算机和网络技术得以长驱直入仪器领域,和仪器技术结合起来。
提纲第一章虚拟仪器及LabVIEW入门1.1虚拟仪器概述1.2LabVIEW是什么?1.3LabVIEW的运行机制1.3.1LabVIEW应用程序的构成1.3.2LabVIEW的操作模板1.4LabVIEW的初步操作1.4.1创建VI和调用子VI1.4.2程序调试技术1.4.3子VI的建立1.5图表(Chart)入门第二章程序结构2.1循环结构2.1.1While 循环2.1.2移位寄存器2.1.3For循环2.2分支结构:Case2.3顺序结构和公式节点2.3.1顺序结构2.3.2公式节点第三章数据类型:数组、簇和波形(Waveform)3.1数组和簇3.2数组的创建及自动索引3.2.1创建数组3.2.2数组控制对象、常数对象和显示对象3.2.3自动索引3.3数组功能函数3.4什么是多态化(Polymorphism)?3.5簇3.5.1创建簇控制和显示3.5.2使用簇与子VI传递数据3.5.3用名称捆绑与分解簇3.5.4数组和簇的互换3.6波形(Waveform)类型第四章图形显示4.1概述4.2Graph控件4.3Chart的独有控件4.4XY图形控件(XY Graph)4.5强度图形控件(Intensity Graph)4.6数字波形图控件(Digital Waveform Graph)4.73D图形显示控件(3D Graph)第五章字符串和文件I/O5.1字符串5.2文件的输入/输出(I/O)5.2.1文件 I/O 功能函数5.2.2将数据写入电子表格文件5.3数据记录文件(datalog file)第六章数据采集6.1概述6.1.1采样定理与抗混叠滤波器6.1.2数据采集系统的构成6.1.3模入信号类型与连接方式6.1.4信号调理6.1.5数据采集问题的复杂程度评估6.2缓冲与触发6.2.1缓冲(Buffers)6.2.2触发(Triggering)6.3模拟I/O(Analog I/O)6.3.1基本概念6.3.2简单 Analog I/O6.3.3中级Analog I/O6.4数字I/O(Digital I/O)6.5采样注意事项6.5.1采样频率的选择6.5.26.5.3多任务环境6.6附:PCI-MIO-16E-4数据采集卡简介第七章信号分析与处理7.1概述7.2信号的产生7.3标准频率7.4数字信号处理7.4.1FFT变换7.4.2窗函数7.4.3频谱分析7.4.4数字滤波7.4.5曲线拟合第八章LabVIEW程序设计技巧8.1局部变量和全局变量8.2属性节点8.3VI选项设置第九章测量专题9.1概述9.1.1模入信号类型与连接方式9.1.2信号调理9.2电压测量9.3频率测量9.4相位测量9.5功率测量9.6阻抗测量9.7示波器9.8波形记录与回放9.9元件伏安特性的自动测试9.10扫频仪9.11函数发生器9.12实验数据处理9.13频域分析9.14时域分析第十章网络与通讯第十一章仪器控制仿真实验一基于Labview的电压测量仿真实验一、实验目的1、了解电压测量原理;2、通过该仿真实验熟悉虚拟仪器技术——LABVIEW的简单编程方法;3、通过本次实验了解交流电压测量的各种基本概念。
基于LabVIEW与MATLAB混合编程的自抗扰控制系统设计与仿真李思远;谷海宇;徐大富;赵阳【摘要】Using DC torque motor as a control obj ect,to compensate the inadequacies of the classic PID control system,ADRC control system is built by MATLAB/Simulink,and it is imported LabVIEW through Simulation Interface Toolkit.Finally NI PXIe-8135 controller is used as the next crew for real-time simulation.The simulation results show that the ADRC control system which can compensate for deficiencies in the classic PID control system with rapidity,accuracy and disturbance resistance and other aspects,and the feasibility of the system.%以直流力矩电机作为控制对象,对经典PID控制系统进行改进,采用LabVIEW与MATLAB/Simulink的混合编程方法搭建了自抗扰控制系统,并通过仿真接口工具包将其导入LabVIEW,以NI PXIe-8135控制器为下位机进行实时仿真,验证了自抗扰控制系统相比经典PID控制系统提高了系统的快速性、精度及抗扰能力,同时验证了联合仿真的可行性.【期刊名称】《测试技术学报》【年(卷),期】2016(030)006【总页数】6页(P461-466)【关键词】PID控制;自抗扰控制;混合编程;实时仿真【作者】李思远;谷海宇;徐大富;赵阳【作者单位】哈尔滨工业大学航天学院,黑龙江哈尔滨 150001;哈尔滨工业大学航天学院,黑龙江哈尔滨 150001;上海宇航系统工程研究所,上海 201108;哈尔滨工业大学航天学院,黑龙江哈尔滨 150001【正文语种】中文【中图分类】TP273.2在目前工程控制领域中,经典PID控制仍然作为主要的过程控制方法,是因为其工作原理与结构简单易于实现,但是在工程实际应用中存在许多缺陷,例如,直接对给定信号和输出信号取误差常常会在系统初始的时候出现很大的超调;对误差信号、误差微分信号与误差积分信号的线性加和并不是最佳的组合方式;在扰动随时间变化的情况下,控制效果不理想等[1]. 自抗扰控制是韩京清研究员运用特殊非线性效应发展而来的一种不依赖于被控对象精确数学模型的新型实用的控制方法,可以很好地解决PID控制在工程中存在的缺陷[2,3].常用的编程语言MATLAB具有十分强大的计算、仿真、绘图等功能,但是它在界面开发、仪器连接控制和网络通讯等方面都不如LabVIEW,若将两者结合起来,则可以充分利用两种语言的优势,更好地解决各个领域的问题[4]. Simulink是MATLAB最重要的组件之一,是一种可视化的仿真工具,用于实现动态系统建模、仿真和综合分析. 本文采用LabVIEW与Simulink混合编程的方法,对以直流力矩电机为控制对象的自抗扰控制器进行设计与仿真,解决控制系统快速性、精度及抗扰能力,并提供简洁的操作界面.NI LabVIEW仿真接口工具包Simulation Interface Toolkit,是LabVIEW专门为调用MATLAB/Simulink的工具,用户可以利用LabVIEW丰富的界面作为Simulink的输入、输出,同时可以利用LabVIEW数据采集程序或其它测量程序连接Simulink[5]. LabVIEW仿真接口工具包的组件如下:1) Model. 一个以图形化形式、源代码形式或者编译过的形式仿真结构图,该模型包括数据的输入输出接口、控制参数和可见信号.2) Host VI. 包括前面板和程序框图,可使用前面板控制模型参数.3) SIT Server. 使用TCP/IP在Host VI和模型之间传输数据的服务器. 首先必须在运行仿真之前启动SIT Server,默认情况下在端口6011上运行.4) Host Computer. 运行Windows NT/2000/XP等操作系统的PC.5) Execution Computer. 运行MATLAB软件、 SIT Server和仿真的计算机.本文以NI PXIe-8135作为 Execution Computer. NI PXIe-8135是基于Intel Core i7-3610QE处理器的高性能嵌入式控制器,结合2.3 GHz基频、 3.3 GHz 四核处理器和双通道1 600 MHz DDR3内存,具有8 GB/s系统带宽和4 GB/s 插槽带宽,2个Super Speed USB端口、 4个高速USB端口、 2个千兆以太网端口、 GPIB、串口和其他外设. 工作流程如图 1 所示.首先,Host VI使用TCP/IP发送新的参数给SIT服务器,SIT服务器传送这些参数给Model模型. 然后由Model模型再使用这些新的参数去执行更新信号值,SIT服务器检测已建立映射的模型信号. 最后SIT Server传输新的信号值给Host VI更新前面板的指示器.2.1 直流电机系统模型本文以直流力矩电机为控制对象,对其进行建模[6],直流力矩电机的电磁平衡方程与转矩方程为式中: Um为电枢电压; Tm为电磁转矩; Cm,Km为转矩常数; Im为电枢电流; Lm为电枢电感; Rm为电枢电阻. 电机额定运行存在摩擦,以及转子与负载具有一定的质量惯量,电机转矩平衡方程为式中: Tf为机械摩擦及其他损耗造成的阻转矩; TL为电机的负载转矩; TJ为由电机转子和负载的转动惯量产生的力矩; B为粘滞系数;ω为角速度. 由直流力矩点及的转矩平衡和电磁平衡的方程经过拉普拉斯变换可推导出传递函数式中: J为电机转动惯量; Ke为反电动势系数,可继续得出电机位置环的数学模型式中:θ为电机转角,其他符号含义与上面公式相同.2.2 自抗扰控制系统结构自抗扰控制器是在经典PID控制器的基础上发展得出的新控制理念,它继承了经典PID控制的精华,并将其控制缺陷进行了改进[7]. 自抗扰控制系统结构如图 2 所示.利用二阶最速开关系统构造出非线性跟踪微分器,采用离散形式,可以更好地跟踪不连续信号,并提取其近似的微分信号,其表达式为式中: v(k)是第k时刻的输入信号;δ是决定微分器跟踪速度的参数;fst(·)函数是最速控制综合函数式中:通过以上的设计可以使跟踪微分器的输出同时可以过滤噪声信号.扩张状态观测器的作用[8,9]是将控制对象尚未完全已知的系统模型,转化成含有未知扰动的积分串联环节,同时对其进行观测,其中所测得的信号当中就有对扰动的实时估计值. 本文采用二阶扩张状态观测器,其结构如式(8)状态空间表达式式中: y为系统输出; b0为系统控制输入的增益; f(x1,x2,t)为系统全部未知扰动的总和,并将其扩张,所以得出从而对其建立扩张状态观测器式中: z是扩张状态观测器的各输出状态; e1是扩张状态观测器对系统输出信号跟踪误差; z3则逼近系统的未知扰动f(x1,x2,t).2.3 自抗扰控制器控制律设计自抗扰控制器中的控制律设计在传统PD算法的基础上加以改进,保留其基本的误差反馈形式,在局部采用非线性算法,构成了非线性PD控制算法[10],其表达式为式中:fal(·)函数是为了避免高频振荡,将幂函数|e|αsign(e)转化成在原点附近具有线性段的连续幂次函数,即饱和函数,δ为线性段的区间长度,其表达式为根据以上推导,若令x1=θ,x2=ω,由式(4)和式(5),可得到电机位置环的状态方程再利用MATLAB/Simulink中的S函数将各个部分模块化[11],连接,得到控制系统模块图,如图 3 所示,其中包含TD跟踪微分器输出与实际信号的对比,以及位置、位置误差、速度、扰动估计等输出量,并与经典PID算法进行对比. 3.1 系统仿真界面设计利用LabVIEW编辑界面,并将Simulink模型导入[12]后,得到控制面板如图 4 所示,而前面板界面可以对模型参数进行设置,对输出结果进行显示,如图 5 所示.3.2 系统仿真结果仿真实验采用的直流力矩电机型号为55LY54,额定电压27 V,电枢电阻8.5 Ω,电枢电感1.57 mH,堵转转矩0.126 N·m,转矩常数0.036 4 N·m/A,反电动势系数0.015 3 V·s/rad,转动惯量4.4×10-5 kg·m2,最大转速1 500 r/m. 自抗扰控制器扩张状态观测器参数为β1=300,β=4 000,β3=20 000,h=0.001,α图6 系统阶跃响应Fig.6 Step response of system1=0.25,α2=0.5,δ=0.002 5,非线性PD取值KP=40,KD=5,经典PID取值同样为Kp=40,Ki=1,Kd=5,仿真时间设为5 s. 系统在负载扰动为2sin(2t+30°) N·m的正弦量与3 s处突加幅值为2 N·m的混合扰动下的阶跃响应如图 6 所示,输出信号的误差如图 7 所示,扩张状态观测器对系统扰动的估计如图 8 所示.图 6 系统阶跃响应Fig.6 Step response of system通过,LabVIEW操作界面可修改期望值与扰动值,在仿真试验中可以看出自抗扰控制器在对突变信号的响应速度上,相较经典PID控制的快速性更好,能够更好地跟踪适应突变的信号,通过误差比较,可得到经典PID最大误差为0.004 rad,而自抗扰控制器输出的最大误差不到 0.001 rad,所以自抗扰控制得到的控制精度更高,且不需要积分调节,在突加扰动时只有少许波动,控制效果很好. 扩张状态观测器对负载扰动的观测基本与输入的扰动值相符,可以很好地补偿扰动. 同时,系统在LabVIEW软件调用下,运行稳定,可以方便地添加与实际设备的输入输出接口,有利于实际应用.本文采用LabVIEW与MATLAB/Simulink混合编程的方法搭建了自抗扰控制系统,通过仿真分析验证了系统的可行性与其良好的控制效果,LabVIEW具有简洁的操作界面,方便更改参数,并且可以进行实时仿真,同时仿真接口工具包含有与外界实物的接口,可将控制对象或控制器替换为实物,从而有针对性地解决实际应用问题.【相关文献】[1] 苏思贤. 自抗扰控制器及其应用研究[D]. 无锡:江南大学,2011.[2] 韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京:国防工业出版社,2009.[3] 黄一,薛文超. 自抗扰控制:思想、应用及理论分析[J]. 系统科学与数学,2012,32(10): 1-21. Huang Yi, Xue Wenchao. ADRC control: ideology, application and theoretical analysis[J]. Journal of Systems Science and Mathematical Sciences, 2012, 32(10): 1-21. (in Chinese)[4] 袁培铎. 基于LabVIEW与MATLAB混合编程的应用研究[J]. 机械制造与自动化,200(6): 15-37. Yuan Peiduo. Application based on LabVIEW and MATLAB[J]. Machine Building, 200(6):15-37. (in Chinese)[5] 吴成东,孙秋野,盛科. LabVIEW 虚拟仪器程序设计及应用[M]. 北京:人民邮电出版社,2008.[6] 叶恭宇. 基于自抗扰控制的机器人关节控制系统[D]. 浙江:浙江大学,2013.[7] Han Jingqing. From PID to active disturbance rejection control[J]. IEEE Trans. Ind.Electron,2009,56(3): 900-906.[8] 黄一,韩京清. 非线性连续二阶扩张状态观测器的分析与设计[J]. 科学通报, 2000, 45(13):1373-1378. Huang Yi, Han Jingqing. Analysis and design of second order nonlinear continuous ESO[J]. Science Bulletin, 2000, 45(13): 1373-1378. (in Chinese)[9] 韩京清. 自抗扰控制技术[J]. 前沿科学,2007,1(1): 24-31. Han Jingqing. ADRC control technology[J]. Frontier of Science, 2007, 1(1): 24-31. (in Chinese)[10] 韩京清. 从PID技术到“自抗扰控制”技术[J]. 控制工程,2002,9(3): 13-18. Han Jingqing. From PID technology to “ADRC control”[J]. Scientific Journal of Control Engineering, 2002, 9(3): 13-18. (in Chinese)[11] 王兵树,姜萍,林永君. Simulink中自抗扰控制技术自定义模块库的创建[J]. 系统仿真学报,2010,22(3): 610-615. Wang Bingshu, Jiang Ping, Lin Yongjun. Simulink in disturbance rejection control technology to create a custom module library[J]. Journal of System Simulation, 2010, 22(3): 610-615. (in Chinese)[12] 曲丽蓉,胡容,范寿康. LabVIEW、 MATLAB及其混合编程技术[M]. 北京:机械工业出版社,2011.。
基于LabVIEW的仿真信号发生器的设计摘要本文首先概述了信号发生器及虚拟仪器技术在国内外的发展及趋势,然后介绍了信号发生器的相关理论,给出了信号发生器的基本原理框图,并探讨了虚拟仪器的总线及其标准、框架结构、LABVIEW开发平台。
在分析本系统功能需求的基础上,介绍了数据采集卡、LABVIEW的编程模式等设计中所涉及到的硬件和技术。
本设计采用USB6211数据采集卡,将虚拟仪器技术用于信号发生器的设计。
该系统具有生成正弦波、方波、三角波、锯齿波的功能。
本设计是虚拟仪器模拟真实仪器的尝试。
实践证明虚拟仪器是一种优秀的解决方案,能够实现各种硬件可以完成的任务。
关键词LabVIEW数据采集卡信号发生器Based on the simulation signal generator labview the designABSTRACTThis article summarizes the development and trend of the signal generator and virtual instrument at home and abroad at first. And then introduces the theory of signal generator, gives a basic block diagram of signal generator, also the frame structure and LabVIEW development platform of the virtual instrument with the inquiry of the bus’s standard. Based on the analysis of this system’s functional requirements, this article introduces the hardware and technology which involved in design of the data acquisition card and the Lab VIEW’s programming modes. This design uses USB6211 data acquisition card. The virtual instrument technology has been utilized in the design of signal generator. The system has ability to produce sine wave, square wave, and triangle wave, saw tooth wave and PWM wave.The design is an attempt of virtual instrument to simulate the reality instrument. It shows the virtual instrument is an excellent solution to achieve the task which is achieved by traditional hardware in the past.KEY WORDS LabVIEW Data AcquisitionCards Signal Generator目录摘要 (I)ABSTRACT (II)1 绪论 (1)研究背景及动态 (1)虚拟仪器发展前景 (1)2 LabVIEW设计的总体概述 (3)LabVIEW的介绍 (3)设计的目的及其要求 (4)设计的基本流程和方案 (5)3 数据采集的介绍与应用 (7)数据采集的系统构成 (7)数据采集卡的选择 (9)3.2.1数据采集卡的主要性能指标 (9)3.2.2数据采集卡的组成 (9)3.2.3数据采集卡USB-6211 (10)数据采集的硬件的安装与配置 (10)数据采集的子程序 (11)模拟输入 (12)3.5.1创建虚拟通道函数 (12)3.5.2定时设定VI (13)3.5.3 DAQmx 触发设定VI (13)3.5.4 DAQmx读取VI (14)模拟输出 (15)4 虚拟仪器软件硬件的设计 (17)虚拟仪器硬件平台 (17)4.1.1 P C机 (17)4.1.2 I/O接口设备 (17)虚拟仪器的软件设计 (19)4.2.1 LabVIEW应用程序的构成 (19)4.2.2 LabVIEW的操作模板 (20)仿真信号的生成 (22)4.3.1正弦信号的生成 (22)4.3.2方波信号的生成 (23)4.3.3三角波信号的生成 (24)4.3.4锯齿波信号的生成 (26)5 系统的仿真波形生成 (27)仿真实现的流程图 (27)仿真波形模块的设计及生成 (27)5.2.1数字波形产生模块的基本概述 (27)5.2.2仿真信号通道设置及波形生成的设计 (28)系统总程序框图的设置及其仿真图的生成 (31)信号生成过程需要注意的事项 (34)致谢 (36)参考文献 (36)1 绪论研究背景及动态由于微电子技术、计算机技术、通信技术、网络技术的高度发展及其在电子测量技术与仪器上的应用,新的测试理论、新的测试方法、新的测试领域以及新的仪器结构不断出现,在许多方面已经突破了传统仪器的概念,电子测量仪器的功能和作用已经发生了质的变化,其中计算机处于核心地位,计算机软件技术和测试系统更紧密地结合成一个有机整体,导致仪器的结构、概念和设计观点等也发生了突破性的变化。
毕业设计(论文)开题报告课题:基于Labview虚拟示波器的设计院系:电气信息学院专业:测控技术与仪器学生姓名:彭成和学号:200801200106指导教师:李亚2012年1月16 日开题报告填写要求1.开题报告(含“文献综述”)作为毕业设计(论文)答辩委员会对学生答辩资格审查的依据材料之一。
此报告应在指导教师指导下,由学生在毕业设计(论文)工作前期内完成,经指导教师签署意见及所在专业审查后生效。
2.开题报告内容必须用黑墨水笔工整书写或按此电子文档标准格式(可从电气系网页或各教研室FTB上下载)打印,禁止打印在其它纸上后剪贴,完成后应及时交给指导教师签署意见。
3.“文献综述”应按论文的格式成文,并直接书写(或打印)在本开题报告第一栏目内,学生写文献综述的参考文献应不少于10篇(不包括辞典、手册),其中至少应包括1篇外文资料。
4.统一用A4纸,并装订单独成册,随《毕业设计论文》等资料装入文件袋中。
毕业设计(论文)开题报告1.文献综述:结合毕业设计(论文)课题情况,根据所查阅的文献资料,撰写2500字以上的文献综述,文后应列出所查阅的文献资料。
文献综述一、引言随着计算机技术、大规模集成电路技术和通讯技术的飞速发展,仪器技术领域发生了巨大的变化,美商国家仪器公司(National Instruments)于八十年代中期首先提出基于计算机技术的虚拟仪器的概念,把虚拟测试技术带入新的发展时期,随后研制和推出了基于多种总线系统的虚拟仪器。
虚拟仪器就是在通用计算机上加上软件和(或)硬件,使得使用者在操作这台计算机时,就象是在操作一台他自己设计的专用的传统电子仪器。
在虚拟仪器系统中,硬件仅仅是为了解决信号的输入输出,软件才是整个仪器系统的关键,任何一个使用者都可以通过修改软件的方法,很方便地改变、增减仪器系统的功能与规模,所以有“软件就是仪器”之说。
虚拟仪器技术的出现,彻底打破了传统仪器由厂家定义,用户无法改变的模式,虚拟仪器技术给用户一个充分发挥自己的才能、想象力的空间。
labview 机械方面毕业设计题目
对于机械工程专业的毕业生来说,选择 LabVIEW 作为毕业设计的主题是一个很好的选择,因为它是一种强大的工程设计和测试工具。
以下是一些可能的 LabVIEW 毕业设计题目:
1. 基于 LabVIEW 的智能机械臂控制系统设计
这个题目可以涉及机械臂的运动学建模、控制系统设计和实现、以及基于LabVIEW 的实时监控和调试。
2. 基于 LabVIEW 的振动分析系统设计
这个题目可以涉及振动信号的采集、处理和分析,以及基于 LabVIEW 的数据可视化。
3. 基于 LabVIEW 的机器人导航系统设计
这个题目可以涉及机器人的路径规划、运动控制和导航,以及基于LabVIEW 的实时监控和调试。
4. 基于 LabVIEW 的精密测量系统设计
这个题目可以涉及精密测量技术的实现、数据处理和误差分析,以及基于LabVIEW 的数据采集和实时监控。
5. 基于 LabVIEW 的智能传感器系统设计
这个题目可以涉及传感器信号的处理、转换和传输,以及基于 LabVIEW 的数据采集和实时监控。
以上题目仅供参考,具体题目可以根据个人兴趣和专业背景进行选择和调整。
同时,毕业设计还需要注意实践性和创新性,尽量选择具有实际应用价值的课题,并尝试提出一些新的解决方案和技术。
基于LabVIEW的虚拟模电实验的构建————调制解调器摘要:虚拟技术的发展使模拟电子技术实验的分析设计过程得以在计算机上轻松、准确、快捷地完成。
这样,一方面克服了实验室在元器件和规格上的限制,避免了损坏仪器等不利因素,另一方面使得实验不受时间及空间的限制,从而促进模拟电子技术实验教学的现代化。
本文介绍了基于LabVIEW的模拟电子技术实验系统——虚拟调制解调器的设计与实现。
此系统具有参数调节方便、易实现、可靠度高等优点。
在高等工程教育中采用虚拟实验室,可以从根本上解决实验与实习经费严重短缺问题。
作为传统电子技术实验的补充,使学生初步掌握仿真软件技术,可使实验内容紧密联系课本内容,比较全面地概括和反映部分所学的知识点,将课堂内容具体化。
关键词:LABVIEW 模拟电子技术虚拟实验调制解调器Abstract:The development of virtua technology that makes the analysis design course of simulated electronic technology test have in computer on relaxed , accurate is completed shortcutly.In this way, it overcame laboratory's limit on electronic component and standard. Meanwhile, laboratory wasn't limited on time and space, and it accelerated experiment teaching's modernization about simulated electronic technology test.This paper has introduced the simulated electronic technical experiment system based on LabVIEW——realization and the design of virtua modem. This system has parameter regulation convenient, easy realization and reliability higher advantage. In higher project education, adopt virtua laboratory , can solve experiment and practice funds serious scarce problem from foundation. As the supplement of traditional electronic technical experiment make student preliminary grasp emulation software technology, it can make experiment content close connection textbook content, comparison summarizes and reflects all-sidedly that the knowledge that studied partially is counted , will classroom content melt specificlyKeywords:virtua simulated electronic technology test Modem1绪论1.1虚拟仪器1.1.1 虚拟仪器的概念虚拟仪器的概念最早由美国N工公司于1895年提出n,其英文原称为Vrul Instrument,简称vi。
基于labview的交叉口信号灯运行仿真系统设计一、研究背景随着城市交通的不断发展和扩大,交叉口信号灯的运行管理变得越来越重要。
传统的交叉口信号灯运行管理通常是依靠交通员的手动控制,但是随着城市交通的日益繁忙和复杂,手动控制已经难以满足实际需要。
设计一种基于labview的交叉口信号灯运行仿真系统对于提高交通信号灯的运行效率和管理水平具有重要意义。
二、研究目的本研究旨在设计一种基于labview的交叉口信号灯运行仿真系统,以模拟和分析交叉口信号灯的运行情况,为交通信号灯的运行管理提供科学依据,并为交通管理部门提供决策支持。
三、系统设计方案1. 系统总体设计本系统主要包括信号灯控制模块、车辆流仿真模块、通信模块和监控显示模块。
信号灯控制模块负责对交叉口信号灯进行控制;车辆流仿真模块模拟车辆的到达和离开情况;通信模块实现系统内部各部分之间的信息传递;监控显示模块用于显示系统运行状态和结果。
2. 信号灯控制模块设计信号灯控制模块采用labview编程,通过程序控制交叉口信号灯的变化情况。
根据交通信号灯的运行规律和车辆流量情况,设计相应的控制算法,实现信号灯的智能控制。
3. 车辆流仿真模块设计车辆流仿真模块主要包括车辆生成模块和车辆运行模块。
车辆生成模块随机生成车辆到达交叉口的时间间隔和车辆种类;车辆运行模块模拟车辆在交叉口的行驶情况,包括车辆的停车、等待和通过过程。
通信模块负责系统内部各部分之间的信息传递和数据交换。
采用labview的网络通信功能,实现系统各部分之间的数据传输和信息交互。
监控显示模块主要是通过labview的图形化界面实现系统运行状态和结果的显示,包括交叉口信号灯的运行状态、车辆流量情况和系统运行数据的实时监测和显示。
四、系统实现方法利用labview的仿真工具箱,设计车辆流仿真模型,模拟车辆的到达和离开情况,包括车辆的生成、行驶和通过过程。
根据实际车辆流量情况,设置不同的仿真参数和驾驶行为,使仿真结果更加真实可信。
基于LabVIEW的自动控制仿真系统设计
袁浩;朱畅;陈志敏
【期刊名称】《实验室研究与探索》
【年(卷),期】2006(025)004
【摘要】介绍了以LabVIEW为软件平台,通过LabVIEW界面与Simulink仿真模型双方通讯建立的自动控制仿真系统.通过结合LabVIEW和Simulink二者在各自领域的优势,将虚拟仪器思想应用到传统实验仪器掌控的自动控制实验,建立灵活的"虚拟实验室".从而增加学生的实践机会,增强学生实验兴趣,加深学生对理论的理解,更重要的是可以鼓励学生探索更高级的课题.
【总页数】4页(P457-459,475)
【作者】袁浩;朱畅;陈志敏
【作者单位】天津大学,电气与自动化工程学院,天津,300072;天津大学,电气与自动化工程学院,天津,300072;天津大学,电气与自动化工程学院,天津,300072
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于LabVIEW的局部放电智能传感器自动校验系统设计 [J], 胡恒山; 黄成军; 郭灿新
2.基于LabVIEW的甲烷产气量自动测量系统设计 [J], 姚燕;邱倩;沈晓敏;金佩薇;梁晓瑜;朱颖颖
3.基于LabVIEW的自动移栽机整排取投苗控制系统设计 [J], 王宁;任玲;李江全;叶
星晨;汪博文;赵庆琨;尚晋
4.基于LabVIEW的自动售货机系统设计 [J], 张安莉;谢檬;郭月
5.基于Labview的电火花自动沉积监控系统设计 [J], 张忠科;张栋;王希靖;陈克选因版权原因,仅展示原文概要,查看原文内容请购买。
精品好文档,推荐学习交流 仅供学习与交流,如有侵权请联系网站删除 谢谢I 基于LabVIEW的控制系统仿真 摘 要 在控制理论教学和实验中,存在着设备短缺、教学手段单一等问题,采用虚拟控制系统实验方式可有效地解决这些问题。本文对控制系统仿真的意义与研究现状作了介绍,提出并确定了基于LabVIEW的控制系统仿真的实施方案。应用NI公司的LabVIEW 2009、控制设计工具包作为软件开发工具,实现了控制系统的建模、分析与设计这一系列过程的计算机仿真。经过编写程序和发布应用程序,最终开发出了一种交互式实验教学系统。该系统包含信号发生器、典型环节、质点-弹簧-阻尼器系统和一级倒立摆系统四个子模块,用户可进行控制系统建模、性能分析、PID设计、LQR设计等方面的研究。各个子模块运行良好,整个系统具有操作简单、界面友好和实时交互的特点;对于教学和实验的改革和创新具有一定的指导意义。 文中详细介绍了该实验教学系统的设计思路与设计过程。主体部分是对系统各个子模块的理论分析、相应的算法分析和虚拟仪器程序的编写,此外还涉及程序的动态调用和发布应用程序等内容。
关键词:控制系统;仿真;LabVIEW;倒立摆;实时交互 精品好文档,推荐学习交流
仅供学习与交流,如有侵权请联系网站删除 谢谢II Simulation of Control System Based on LabVIEW Abstract In the teaching and experimental process of control theory, there exist problems such as equipment shortages, monotonous teaching methods and etc. We can use Virtual Instrument to solve these problems effectively. This paper introduces the significance and research status of the control system simulation, puts forward and determines the implement scheme of the Control System Simulation Based on LabVIEW. Use NI's products (LabVIEW 2009, Control Design Toolkit) as software development tools to realize computer simulation of the control system modeling, analysis and design process. After writing programs and publishing applications, we can achieve an interactive experimental and teaching system. The system consists of four sub-modules: signal generator, typical elements, the mass-spring-damper system and the single inverted pendulum system. Users can do research in control system modeling, performance analysis, PID design, LQR design and other aspects. Each sub-module of the system runs well, the whole system has the features as follows: simple, friendly interface and real-time interactive. It will provide the teaching and experiment field with reform and innovation. This paper describes the thinking and design process of the system in details. Theoretical analysis and algorithm analysis for the sub-module and Virtual Instrument programs writing are the main parts. It also discusses the dynamic program invocation and publishing applications and so on.
Keywords: Control System; Simulation; LabVIEW; Inverted Pendulum; Real-Time Interaction 精品好文档,推荐学习交流
仅供学习与交流,如有侵权请联系网站删除 谢谢I 目 录 1 绪论 .................................................................................................................................... - 1 - 1.1 课题背景 ........................................................................................................................................ - 1 - 1.2 控制系统仿真的意义..................................................................................................................... - 1 - 1.3 控制系统仿真的研究现状 ............................................................................................................. - 2 - 1.4 本课题研究内容 ............................................................................................................................ - 2 -
2 LabVIEW概述 ................................................................................................................... - 4 - 2.1 虚拟仪器技术 ................................................................................................................................ - 4 - 2.2 控制设计工具包 ............................................................................................................................ - 5 -
3 系统方案的选定 ................................................................................................................ - 7 - 3.1 系统概述 ........................................................................................................................................ - 7 - 3.2 系统方案的比较与选定................................................................................................................. - 7 - 3.3 系统子模块的规划......................................................................................................................... - 9 - 4 系统设计 .......................................................................................................................... - 10 - 4.1 信号发生器 .................................................................................................................................. - 10 - 4.1.1 确定方案 ............................................................................................................................. - 10 -
4.1.2 VI设计 ................................................................................................................................. - 10 -