雷神航管雷达丢目标的分析及解决方法
- 格式:pdf
- 大小:191.14 KB
- 文档页数:2
L波段高空气象探测雷达丢球原因及应对策略摘要:高空气象探测雷达在气象方面的应用很广。
基于此,本文主要介绍了L波段高空气象探测雷达丢球成因的同时,剖析了L波段高空气象探测雷达丢球现状,并提出了应对策略,以进一步增强了高空气象探测数据分析的准确性,以供参考。
关键词:L波段;高空气象;雷达丢球引言:我国研究的高空气象探测雷达,具备了数字化、集成化和自动化等特点。
但由于次雷达所具有的高精度性水平,直接产生了雷达波瓣和脉冲长度限制,在信号获取的过程中,往往会有乱码、凹位不整、探空飞点等异常现象,又或者是丢了球,从而不利高空气象探测工作的顺利开展。
一、L波段的高空探测雷达丢球问题原因(一)环境因素造成的丢球高空探测作业中,由于环境因素而引起的丢球主要涉及如下几个方面:1、所选择的放球场地与同规定要求不符时,需确保探测场地周围空旷,地面障碍物对mimo设备的阻挡率要在5°之内,探测场地0.5径的50m范围内无大树、高耸的建筑物、架空天线等。
2、观测场内没有电磁环境,以避免因信号进入接收机,而对地面雷达的正常运行造成干扰。
(二)人为原因造成的丢球1、放球期间,由于主班人员未正确调节探空仪的频段,导致放球时雷达技术无法追踪或能够自行追踪,结果是副瓣抓球事件。
2、放球时,由于主班人员未将天控键调整至手动状况,从而发现丢球事件。
3、探空仪频段有很大的改变幅度,当班人员也未对飞机升空时的探空仪频段作出改变,从而发现了丢球事件或副瓣抓球。
4、将放球后的工作频段调整为半自动运行,与放球结束时的工作频率不平衡而发生跳频,从而造成丢球。
5、由于没浸泡好电池,与放球时的雷达技术运行条件不合,从而造成丢球。
6、雷达设备在维修、校准和测试时未按照国际雷达标准执行。
二、L波段高空探测雷达丢球现象(一)干扰信号造成的丢球干扰信号的存在将影响雷达的主要信息,如果是强干扰信号进入到探测的雷达数据系统中,就会淹没了主信息中的已记录信息,从而影响到信息的正确接收,导致了信息失测,又或者是重新释放了气球。
飞机气象雷达原理及故障维护分析摘要:本文主要介绍了飞机气象雷达的工作原理,讨论了雷达图像显示不正确、雷达图像目标失真、雷达不扫描、雷达散热、环境对雷达的影响等问题的排除方法,以期为从事该项维护工作的机务工作人员提供思路和方法。
关键词:气象雷达;原理;故障1气象雷达的工作原理机载气象雷达根据电磁波反射原理确定目标的位置。
物体反射电磁波的能力与物体的性质、大小和电磁波的频率直接相关。
目标物体的导电性越高,反射面越大,回波强度越大。
当目标物体的几何尺寸和波长相差较大时,反射能量会减弱。
如果可以将目标物体的反射面直径与雷达波的波长进行比较,则反射能量也会显著增加。
目前用于气象探测的雷达工作频率一般在200MHz~10000MHz之间。
气象雷达的工作原理包括距离测定、方位测定、降水探测、湍流检测和风切变检测。
1.1距离测定气象雷达的主要任务是测量目标物体与地面之间的距离。
气象雷达发射的电磁波以光速在空气中传播,经测量后可接收到目标回波信号,接收到回波信号与发射脉冲之间的时间间隔为t,被测目标与飞机之间的距离可以计算为L=ct/2,其中c为光速。
目标物体的距离分辨率主要由脉冲宽度决定。
如果要提高对近程目标的识别能力,就必须使用较窄的脉冲宽度。
1.2方位测定目标物体的方位角主要通过测量雷达天线波束轴的瞬时方位角来确定。
雷达天线形成的波束呈圆锥形,宽度较窄。
当雷达天线指向特定的方位角时,雷达只能接收到该方位角内物体产生的目标回波,雷达设备将接收到的回波信号传输到显示器上,显示器显示实际的方位角。
雷达的方位角分辨率主要取决于天线水平面上波束宽度,波束宽度越窄,分辨率越高。
1.3降水探测气象雷达是监测天气状况的主要工具,因此对降水的探测是气象雷达监测的重要组成部分。
雨、雹、雪等材料都是导电性水材料。
气象雷达可以探测到雨滴或相对潮湿的冰雹,但不能探测到云、雾、干冰雹等物质。
含水材料可以吸收雷达发射的射频脉冲能量,部分能量会丢失,其余能量会被反射回来。
雷达常见故障分析作者:程宏来源:《中国科技博览》2018年第13期[摘要]本文重点围绕航管雷达的故障与可靠性进行分析,希望能够对读者提供一些借鉴和参考。
[关键词]雷达;故障;原因分析;维修中图分类号:S163.5 文献标识码:A 文章编号:1009-914X(2018)13-0109-011.前言近程航管一次雷达在民航空中交通管制系统中占有重要地位,它对航行、起飞、着落的安全性承担重大使命;同时,航管雷达的任务持续时间又是无限的,要求日以继夜连续运行。
所有这一切,要求雷达系统平均工作时间(MUT)达到2万小时的高可靠性,平均停机时间(MDT)不大于30分钟的决速维修性,并必须具备在线维修特性。
2.常见雷达的故障2.1 计算机软件存在的缺陷航管雷达系统是一个以计算机技术为核心的大型实时处理系统。
支持计算机工作的是操作系统和应用软件,以3821雷达为例,操作系统采用了多任务、多用户、支持后台运行的Windows系统,应用软件多达近十个,其内容包括了系统控制、监视、信号处理等方面,这些软件既单独工作又互相配合,相互间的接口关系错综复杂。
软件理论已经证明:任何一个程序都存在错误,人们可以通过合理的测试来证明它仍然存在错误,却无法证明它已经不存在错误。
由此可见。
计算机软件系统发生错误造成的雷达系统故障是无法避免的。
因此计算机系统为使用人员设置了各种各样的系统复位方式,以便系统一旦出错,能够方便、快捷地恢复正常运行。
2.2 设备现场运行环境的复杂性雷达集弱电/强电、直流/微波、大功率信号/微弱信号、计算机/通信、模拟/数字电路等多种技术于一身,是一个极其复杂的集成系统。
雷达系统的运行,形成了一个十分复杂的电磁环境;雷达终端设备本身相对比较单一,但是航管楼内存在着大量不同波段、不同功率的通信设备,其运行环境也十分恶劣。
我们知道电磁干扰人侵系统的方法很多,由于计算机系统接口的多样性,进一步加大了抗干扰的复杂性,干扰的影响会随着抗干扰技术的提高而减小,但要完全消除是不现实的,也就是说现实中存在的干扰偶尔会影响计算机的工作,从而造成设备工作异常或出现错误的结果。
DLD-100C 二次雷达引起自动化目标分裂分析及解决方法摘要:本文对由DLD-100C二次雷达引起自动化目标分裂分析事件进行分析与总结。
此次事件不属于常见的硬件或软件故障,这是由于外部环境发生变化导致的故障。
近年来空管雷达更新及新建项目很多,在电磁环境愈加恶劣的形式下,需要在雷达选址时有更多的考虑。
现在笔者分享一下故障排查和处理过程,以供分析与探讨。
关键字:二次雷达目标分裂假目标二次雷达是由询问雷达和机载应答机所组成的无线电电子测位和辨认系统。
地面询问雷达发射电磁波,机载应答机接收到询问电磁波后被触发,发射应答电磁波,询问雷达根据接收到的应答信号,进行分析计算得到飞机实时位置和高度等信息。
当雷达天线和应答机之间经过地面或者建筑物等障碍物反射到达的路径,就会形成多径发射,这是造成二次雷达目标分裂,形成假目标的最主要原因。
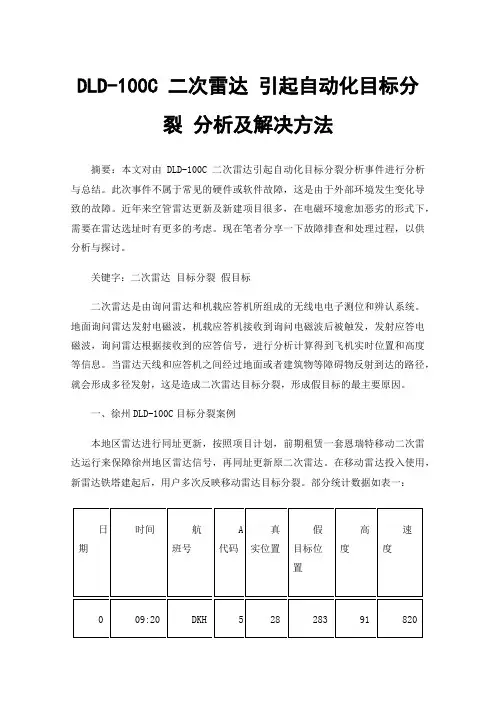
一、徐州DLD-100C目标分裂案例本地区雷达进行同址更新,按照项目计划,前期租赁一套恩瑞特移动二次雷达运行来保障徐州地区雷达信号,再同址更新原二次雷达。
在移动雷达投入使用,新雷达铁塔建起后,用户多次反映移动雷达目标分裂。
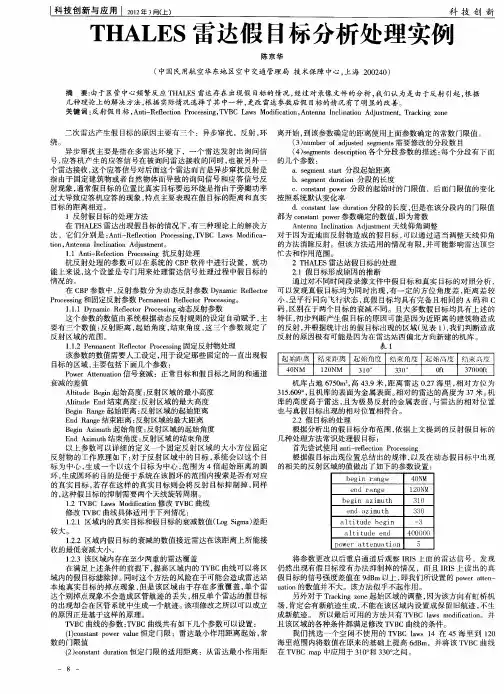
部分统计数据如表一:表一:自动化反馈部分假目标通过对用户反馈数据统计分析,分裂目标集中在距离雷达头200公里至300公里,185度左右的区域范围,比较有规律。
现场运行记录,在合肥附件区域,航迹信号出现较为严重的弯曲抖动(见图一)。
收到用户反馈后,我们先对移动雷达系统自身参数进行了检查,运行情况无明显异常。
同厂家工程师沟通,考虑可能是移动雷达运行的场地改变导致该区域雷达大面积目标分裂。
在实际场地,新建雷达铁塔为5米*5米,高度25米,且整体为钢结构,移动雷达高度为18米;从方位上,新铁塔距移动雷达塔约80米,偏南185°位置。
图一:未过滤前区域航迹状态二、目标分裂问题解决根据运行要求,需要解决该区域因为航迹信号质量差,跟其他雷达融合以后会产生目标分裂,通过过滤把信号质量差的过滤掉,不要影响融合信号质量。
一份雷达异常跟踪记录的分析作者:吴恒来源:《农家科技下旬刊》2015年第11期摘要:本文通过对2013年2月26日07时邢台站出现的一次探空异常跟踪,造成部分记录缺失的分析,查找根本原因,及时采取措施,排除故障,保证了高空探测的顺利进行,并总结出排除此类故障的基本方法。
对于及时准确地获得高空数据至关重要。
关键词:雷达因素;异常跟踪;丢球;假定向一、引言GFL(1)高空雷达具有高精度和灵敏度的特点,高精度设备为气象预报、科学研究提供了更为精确的高空数据,同时由于这些设备的高度灵敏,在正常的天气状况下,也会产生一些特殊的故障,能否成功地排除这些故障,对于及时准确地获得高空数据至关重要。
本文通过一份雷达异常跟踪记录的分析,查找原因,总结排除此类故障方法,保证获得及时准确的探空数据,更好地为气象预报服务。
二、故障现象2013年2月26日07时,邢台探空站在放球后44秒,雷达仰角出现死位现象,值班员通过多次触发使仰角恢复正常,后找球又出现旁瓣,直到12分后才找到真信号。
三、故障分析故障分析:这次故障从发生到排除有2个现象,1是丢球,2是假定向即旁瓣球。
1.丢球。
造成丢球的原因很多,例如:(1)雷达跟踪探空仪时,仪器过顶且离距离较近,雷达受仰角和方位角转速的限制,不能自动跟踪。
(2)由于回答器质量问题,导致频率漂移。
(3)距离太远超过100千米时,探空信号变弱,雷达跟踪不上。
(4)距离太近,信号处于过饱和状态,雷达会出现丢球现象。
(5)电池电压不正常导致频率失谐。
(6)强干扰,导致天线失控丢球。
处理的方法:(1)根据风向确定放球点,减少过顶现象发生。
(2)放球前认真检查回答器性能。
(3)随着探测时间的增加,要注意调整频率,以防因为频偏而丢球。
(4)放球点选择在与雷达具有一定距离的位置,避免信号过饱和。
(5)仔细检查电池电压,一般在18Ⅴ-22Ⅴ之间(冬季在20Ⅴ-22Ⅴ左右,夏季在18Ⅴ-20Ⅴ左右)。
(6)注意避开强干扰源。
雷达故障检测与分析作者:王明煌来源:《科技创新导报》 2011年第24期摘要:本文对航海雷达在使用过程中基本上可能会出现的故障逐步进行分析,并提出可能会发生故障的地方,以便于使用者和维修人员参考。
关键词:雷达故障分析中图分类号:TN95 文献标识码:A 文章编号:1674-098X (2011) 08 (c) -0054-02雷达作为航海人员的眼睛,它的主要作用是探测前方情况,一旦它发生任何故障,驾驶人员就会象盲人一样迷失方向,甚至还会导致船舶碰撞事故的发生。
航海雷达的故障根据表现形式可分为显性和隐性,显性的故障是指能够根据肉眼或听觉就能直接判断的,比如无视频输出、指示灯熄灭等,隐性的故障一般情况下凭视觉或听觉器官无法察觉的故障,比如接收性能下降、发射机性能下降等。
雷达故障存在多样性,所以应根据不同故障的表现形式采取不同的方法去探测并维修。
1雷达隐性故障检测和分析对雷达的隐性故障的检测的最好的方法就是利用本雷达发射信号通过某些装置让自身接收,然后再对该信号进行放大处理,最后在显示屏幕上显示出对应的图象,根据图形的尺寸变化进行比较,就可以判断雷达性能的变化。
现采用总性能监视器来检测整个辐射系统和接收机系统的性能。
该监视器进行监视性能时,在雷达周围尽量没有物标出现的情况下,效果会比较好。
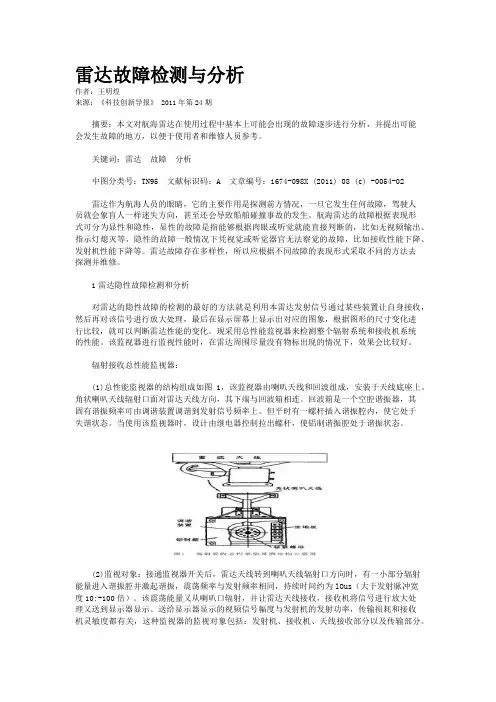
辐射接收总性能监视器:(1)总性能监视器的结构组成如图1,该监视器由喇叭天线和回波组成,安装于天线底座上。
角状喇叭天线辐射口面对雷达天线方向,其下端与回波箱相连。
回波箱是一个空腔谐振器,其固有谐振频率可由调谐装置调谐到发射信号频率上。
但平时有一螺杆插入谐振腔内,使它处于失谐状态。
当使用该监视器时,设计由继电器控制拉出螺杆,使铝制谐振腔处于谐振状态。
(2)监视对象:接通监视器开关后,雷达天线转到喇叭天线辐射口方向时,有一小部分辐射能量进入谐振腔并激起谐振,震荡频率与发射频率相同,持续时间约为lOus(大于发射脉冲宽度10:-100倍)。
L波段高空探测雷达丢球现象及应对摘要:本文结合郑州市气象局开展高空探测的实际,简要概况L波段高空探测原理,分析高空探测雷达丢球现象,并针对丢球现象提出有针对性应对措施,为今后开展高空气象探测提供参考。
关键词:高空探测雷达丢球现象应对措施引言L波段高空气候监控雷达探测精度和自动化程度高、采样速度快、体积小、能耗少,可以生成不同种类气象产品,对高空气象要素数据探测。
自郑州市气象局使用L波段雷达探测系统以来,高空气象探测自动化程度也越来越高,因探测雷达测距和测角精确度水平较高,使得雷达脉冲宽度和波瓣宽度较窄,降低雷达定向和自动跟踪性能,在对信号采集过程中出现飞点、无信号、乱码、凹口不齐情况,甚至丢球、旁瓣抓球等。
1 L波段高空探测原理在高空气象探测中,L波段雷达可连续跟踪、定位、测量探空气球运行轨迹,并在数学模型帮助下计算高空中气象情报信息;并不间断接收来自探空仪上探空码,在译码器作用下获取探空数据信息。
探空气球升空时安装有无线电回答器,在高空气象探测工作未开始前会向地面发出“询问信号”,触发地面回答器,发出“回答信号”,将“询问信号”与“回答信号”间时间间隔、回答信号位置方向结合,计算探空气球与雷达间直线距离、仰角、方位角大小;最后根据计算公式,求取对应高度层风向风速。
利用探空气球携带探空仪对高空中大气温湿度、气压值数据测量。
探空仪器主要由气压、温度、湿度反应灵敏感应元件和转换电路组成,随着大气温湿度、气压变化电参量数据也会发生变化,在对变换电参量采样时,应结合转换电路,并利用探空码控制回答器。
在回答器作用下,向地面发送探空码被雷达接收机接收,在相关软件作用下破解探空仪,此时就能获取高空温湿度、气压气象要素数据。
2 L波段高空探测雷达丢球现象2.1 频率漂移引发的丢球L波段高空探测雷达运行时频率1669~1981MHz,运行频率范围广泛,但却不能控制自身工作频率。
探空气球从地面到高空,随后在预定位置处爆炸,气层中温度变化超过120℃。
Technology Analysis技术分析DCW75数字通信世界2019.081 故障现象雷神二次雷达遭到雷击后,两个通道的点迹录取器、Control & Bit 板、模式产生器、视频时钟板、回波译码器、现场服务板及ADGU 指示灯均出现告警。
从RMM 上查看雷达无目标,从CMS 上查看雷达询问机无发射,并伴随无方位信息和NVRAM 故障等一序列的告警信息。
2 现场处理出现故障后设备无目标输出,技术人员重启雷达设备,发现雷达不能通过自检,同时ADGU 板件一直处于告警状态。
更换点迹录取器及ADGU 板件后,重启雷达设备,恢复正常工作。
由此可确定故障为点迹录取器和ADGU 板件遭受雷击损坏后引起。
3 板件的故障原因分析及自主维修点迹录取器和ADGU 更换备件后设备恢复正常,证明雷达设备供电和其他部分并未损坏,故障点确定为点迹录取器和ADGU 遭受雷击后损坏。
3.1 点迹录取器故障原因分析及维修3.1.1 雷神二次雷达询问机启动流程设备的点迹处理部分包括点迹录取、接收和控制监视功能。
点迹录取器的主要功能是接收原始的应答、方位和控制信息,并根据这些信息为每一个目标生成一份目标报告。
内置的控制器用于管理系统的所有控制和监视功能,而且在双通道系统中还要把这些信息传送到另一个机柜中。
雷神二次雷达系统加电后,点迹录取器上单片机系统进行自检,自检完成后,单片机系统将会运行雷达出厂时写在EEPROM 里面的程序,读取存在NVRAM 里面的台站配置参数,并将读取到的数据传输至Control & BIT 板上的EEPROM 里面。
回波译码器通过高速总线来初始化,Control & BIT 板上的89C51单片机运行出厂时写入里面的程序,读取点迹录取器传到EEPROM 里面的数据后通过串行链路来初始化询问机的其他板件,如果其他板件无告警信息,询问机将正常启动。
3.1.2 NVRAM 的特点及在点迹录取器中的作用NVRAM 主要是雷达出厂时存入的设备型号及运行参数等基本信息的芯片,根据每个雷达站现场情况的不同将会写入台站的配置信息。
雷神雷达RS232数据引接中针脚连接及时钟同步方式设定分析与应用摘要:本文根据RS232 DB25连接器对于DCE与DTE引脚定义,分析DTE设备与DCE设备之间针脚的连接方法,重点分析不同情况下,时钟信号的连接方法。
结合雷神雷达设备RS232串口数据引接传输案例,介绍雷神雷达数据接口与传输接入设备接口针脚连接及雷达设备时钟设定方法。
对于雷达维护人员进行雷达数据引接工作具有一定的指导作用。
关键词:雷神雷达;RS232;时钟设定;DCE和DTE引言目前,笔者所在单位有三种型号二次雷达设备,分别为雷神雷达、泰兹雷达及恩瑞特雷达,雷达输出数据均为RS232 DB25串口数据。
串口数据引接至传输接入设备后通过运营商传输链路传送至ATCC(空中交通管制中心)。
传输接入设备的种类也有多种,例如银讯PCM、贝利PCM、AR3260等设备。
在进行雷达数据传输时,有的设置为雷达设备提供时钟信号,有的设置为传输接入设备提供时钟信号;两端设备为DCE-DTE连接或DTE-DTE连接。
所以,由于时钟信号提供方不同及两端设备身份定义(DCE或DTE)不同,在雷达数据输出口与传输接入设备接口连接时,要注意数据及时钟信号的针脚连接方式。
此外,雷达内部也需要设置时钟同步方式,才能保证雷达信号的正常传输。
一、RS232接口标准简介RS-232-C标准接口(全称EIA RS-232-C)是常用的串行通信接口标准之一,它是由美国电子工业协会联合贝尔系统公司、调制解调器厂家及计算机终端生产厂家于1970年共同制定。
EIA(Electronic Industries Association)代表美国电子工业协会,RS(recommended standard )代表推荐标准,232是标识号,C表示此RS232的版本,在此之前还有RS2328、RS232A标准。
RS-232-C标准接口与国际电报电话咨询委员会(CCITT)的V.24标准定义一致。
方法创新科技创新与应用Technology Innovation and Application2018年9期
雷神雷达通过视频时钟板进行正北校准的方法梁朝辉(中国民用航空中南地区空中交通管理局广西分局,广西南宁530000)
摘要:二次雷达的正北标记对二次雷达的运行极其重要,只有确定了参考方向,二次雷达的点迹录取器才能准确的找出雷达目 标相对雷达站的方位和距离。文章主要介绍正北标志的重要性、雷神雷达通过视频时钟板来调节正北标志的方法、并延伸扩展雷神雷 达的视频时钟板的其它功能。希望通过这篇文章,跟大家分享本人在工作中对雷神雷达的一些工作经验。关键词:视频时钟板;正北校准;雷神雷达中图分类号:TN958 文献标志码:A 文章编号= 2095-2945 (2018)09-0116-03
Abstract: The correct north mark of the secondary radar is very important to the operation of the secondary radar. Only when
the reference direction is determined, can the spot track recorder of the secondary radar accurately find the azimuth and distance of the radar target relative to the radar station. This paper mainly introduces the importance of the north mark, the method of Raytheon radar adjusting the north sign by video clock board, and extends the other functions of Raytheon radar video clock board. Through this article, I hope to share with you some of my work experience on Raytheon radar.Keywords: video clock board; north calibration; Raytheon radar
广汉机场二次雷达由于反射造成的假目标的原因分析摘要:二次雷达是现代空中交通管制系统的关键设备之一,雷达站周围的环境对二次雷达的探测性能有着显著的影响。
本文对二次雷达由于反射造成的虚假目标的原因进行了详细分析,对于二次雷达的日常观测及维护具有一定的指导意义。
中国民航飞行学院广汉机场二次雷达站是国家重点建设工程项目(3号工程)。
其二次雷达设备是中国民航使用的第一部国产二次雷达,由中国电子科技集团公司第十四研究所生产。
该二次雷达在设备调试与试运行过程中,一些区域产生假目标较多。
该雷达站位于成绵高速边上,距广汉市区5公里,往金堂方向的龙泉山脉20公里左右。
通过分析其地理位置及其周边环境影响,我们得出其假目标主要由山体及周围高大建筑物发射引起。
1.天线俯仰波束分裂造成丢点由地面反射引起的多路径效应一直是影响雷达性能的主要因素之一,导致雷达接收信号的起伏,影响二次雷达的检测和解码性能;而雷达站周围环境中的高大建筑物引起的反射会在建筑物的后面产生虚假的目标幻象。
当雷达天线俯视镜面反射的表面(如水面)时,会产生多路径干涉现象。
镜面反射体是指服从反射定律的光滑(镜面似的)表面。
当天线照射给定几何关系和电特性的镜面反射表面时,反射波前相对于入射波前的方向和相位是可以预测的。
图1所示出多路径干涉的几何关系。
图中假设反射表面为平面,尽管有时还要考虑地球的曲率,但这个假定一般还是可行的。
图1 平面地面反射的几何图如图1所示,若发生镜面反射,从天线到目标的雷达电磁波有两个不同的路径:直射路径和反射路径。
由图1可知,两条路径传播的距离是不相同的,这就导致了直射波和反射波之间的相位差,而它是产生多路径效应的主要原因。
根据电磁波传播的基本原理,若距离差δ,则对应的相位差等于2πδ/λ。
其中,λ是雷达波长。
附加相位差是由反射表面的反射系数引起的,有时是由天线在直射方向和反射方向上传播因子的相位差引起的。
由于相位差,直射波和反射波在目标处要么干涉相加,要么干涉相消。
L波段雷达在高空探测中的常见问题与处理措施摘要:L波段雷达在高空探测在日常的工作中通常也会遇到相关的异常问题,例如丢球、重放球、旁瓣等等,发射我那个异常情况会影响到高空气象的探测质量。
本文主要是针对L波段雷达在高空探测中的常见问题与处理措施进行分析的。
关键词:L波段雷达高空探测常见问题处理措施引言高空气象探测对综合气象探测有重要的作用,为气候变化的研究、预测、气候资源的开发等提供数据,但是L波段雷达在高空探测中也常常会出现一些问题,所以需要提高高空气象的探测质量。
1.L波段雷达在高空探测概述L波段雷达在高空探测系统主要是由GFE(L)1型二次侧风雷达和GTS1型数字式的电子探空仪组成的。
这些系统的组成基本可以达到探测数据的采集、监测、集成等功能的自动化,自动化的高空探测系统可以准确的观测到高空各处的气压、气温、风向、风速、温度等情况资料。
高空探测系统的观测资料可以很有效的为基础的为气候变化的研究、预测、气候资源的开发等提供数据,但是在日常的工作当中依旧无法避免等情况的发生,需要及时解决相应的问题,提高高空探测的工作质量。
2 L波段雷达在高空探测中的常见问题2.1 L波段雷达在高空探测中的常见的丢球问题丢球是在L波段雷达高空探测中常见的一项问题,主要是因为放球的瞬间发生了过顶丢球现象,最终导致数据出现误差的现象,固定雷达的俯仰设计是负九到九十度。
正常的情况下天线旋转的最快角速是方向角小于等于二十五英寸每秒钟,俯仰角度小于等于十八度每秒。
如果瞬间过顶导致雷达无法及时跟踪引起丢失球。
内部的操作人员需要立即通知外部的操作人员。
室外的操作人员必须立即告知室内操作员大致的方向和高度,具体知道球的位置。
内部操作员将天控制转换为手动状态。
示波器处于角度模式,因此天线与气球上示波器的四条亮线对齐,并选择自动的控制。
当它恢复到自动状态时,探空仪器位于图像的中心,将示波器显示模式切换到距离模式,调整距离的按钮,将凹口返回到垂直线的中心位置。
船舶雷达问题研究报告1. 引言船舶雷达是一种重要的导航设备,广泛应用于船舶领域。
然而,船舶雷达在实际使用中,仍存在一些问题和挑战。
本报告将对船舶雷达的问题进行研究,并提出相应的解决方案。
2. 船舶雷达常见问题2.1 目标探测问题在船舶雷达的使用中,常常遇到目标探测问题。
由于海上环境的复杂性,包括海浪、雾、雨等因素的影响,船舶雷达难以准确地探测到目标。
常见的问题包括目标虚警、漏报等。
2.2 数据处理问题船舶雷达采集到的海洋数据通常庞大而复杂,需要进行有效的处理和分析。
然而,由于数据处理算法的复杂性和海上环境的不确定性,船舶雷达数据的处理常常存在问题,比如数据丢失、处理延迟等。
2.3 抗干扰能力问题在船舶雷达的使用中,经常遭遇干扰问题。
包括雷达图像的杂波、信号干扰等,这些干扰会影响船舶雷达的性能和可靠性。
3. 船舶雷达问题的解决方案3.1 目标探测问题解决方案目标探测问题的解决方案主要包括以下几个方面:•优化雷达天线和发射机,提高波束的方向性和增益,增加目标信号的接收灵敏度。
•引入先进的滤波算法,过滤掉一些无关的噪声和杂波信号,减少虚警的发生。
•结合其他船舶导航设备,如GPS、惯性导航系统等,提高目标探测的准确性和可靠性。
3.2 数据处理问题解决方案数据处理问题的解决方案主要包括以下几个方面:•引入高性能的处理器和存储设备,提高数据处理的速度和效率。
•优化数据处理算法,减少计算复杂度和存储空间占用。
•制定合理的数据处理策略,根据船舶雷达数据的特点和需求进行适当的数据压缩和抽取。
3.3 抗干扰能力问题解决方案抗干扰能力问题的解决方案主要包括以下几个方面:•添加合适的抗干扰电路,对雷达接收机进行改进,提高抗干扰能力。
•采用频率扫描技术,通过对频谱的扫描来检测和抑制干扰信号。
•引入数字信号处理技术,对接收到的信号进行滤波和去噪处理,增强对目标信号的识别能力。
4. 结论船舶雷达作为一种重要的导航设备,在目标探测、数据处理和抗干扰能力方面仍存在一些问题和挑战。