(完整版)46图像特征的非刚性匹配_Ji_ZHAO_2016_10_12
- 格式:ppt
- 大小:10.24 MB
- 文档页数:33
视觉识别单选题试题及答案您的姓名: [填空题] *_________________________________关于数学形态学处理,以下说法正确的是() [单选题]先膨胀后腐蚀的运算称为开运算先腐蚀后膨胀的运算称为闭运算细化是将一个曲线型物体细化为一条单像素宽的线,以图形化显示出其拓扑性质消除连续区域内的小噪声点,可以通过连续多次使用开闭运算(正确答案)答案解析:无下列关于区域形状的特征描述中,不正确是() [单选题]矩形度是物体面积与其最小外接矩形面积之比边界的形状数具有平移、旋转和比例缩放不变性(正确答案)当区域为圆时,圆形度达到最大值1归一化的中心矩具有平移、旋转、比例缩放不变性答案解析:无与灰度范围在[0, 255]的像素相当的存储变量为__() [单选题]byte(正确答案)wordintfloat答案解析:无下列图像边缘检测算子中抗噪性能最好的是() [单选题]梯度算子Prewitt算子(正确答案)Roberts算子Laplacian算子答案解析:无光学字符检测的英文缩写是以下哪一个? [单选题]OCROCV(正确答案)PVCLCR答案解析:无正方形经过仿射变换后不可能变为() [单选题]矩形平行四边形菱形梯形(正确答案)答案解析:无控制系统在一定(结构,大小)的参数摄动下,维持其他某些性能的特性,称为() [单选题]鲁棒性(正确答案)稳定性不变性答案解析:无以下属于3D视觉技术的是() [单选题]Blob分析光学字符识别Hough转换激光三角测量(正确答案)答案解析:无和普通相机相比,下面哪些属于工业相机的优势 [单选题]不能拍运动速度快的物体价格便宜隔行扫描光谱范围宽(正确答案)答案解析:无相机按传感器类型分为 [单选题]彩色相机;黑白相机线阵相机、面阵相机CMOS、CCD黑白相机、数字相机(正确答案)答案解析:无某款镜头的最大兼容CCD尺寸是1/2"靶面,以下哪个靶面的相机可以使用该款镜头: [单选题]1 inch1/2 inch(正确答案)8.8*6.6mm答案解析:无下列哪些是对CCD上最小成像单位的正确描述 [单选题] 像素(正确答案)靶面像素深度分辨率答案解析:无以下哪些连接是错误的 [单选题]CS口镜头+CS口相机C口镜头+C口相机CS口镜头+5mm接圈+C口相机(正确答案)C口镜头+5mm接圈+CS口相机答案解析:无以下哪一项属于按镜头用途的分类 [单选题]显微镜头、远心镜头、CCTV镜头(正确答案)定焦镜头、变焦镜头、定光圈镜头远心镜头、非远心镜头短焦镜头、中焦镜头、长焦镜头答案解析:无拍摄目标尺寸为50*30mm,拍摄距离为200mm,选用的相机是SCA640-74fm 1/2"CCD,可以选用下面那个镜头? [单选题]M0814-MP2(f=8 2/3")M2514-MP2(f=25 2/3")M5028-MP2(f=50)M1614-MP2(f=16 2/3")(正确答案)答案解析:无以下哪个选项是形容放大倍率的() [单选题]所成图像的尺寸CCD芯片的大小芯片大小/视野大小视野大小/芯片大小(正确答案)答案解析:无以下哪种不属于常见的镜头接口类型: [单选题]C口CS口F口N口(正确答案)答案解析:无下列哪项不属于远心镜头的优势: [单选题]低畸变高分辨率价格便宜(正确答案)大景深答案解析:无下列哪项不属于机器视觉中的光源主要起到的作用: [单选题]照亮目标、提高亮度形成有利于图像处理的效果为了体积小,便于操作(正确答案)克服环境光的干扰,保证图像的质量答案解析:无光是一种电磁辐射,在整个电磁辐射波谱中,光波只占其中一小部分,那么按照波长由短到长排列,顺序正确的是: [单选题]X射线、伽马射线—紫外光—可见光—红外光—微波、无线电(正确答案)X射线、伽马射线—微波、无线电—紫外光—可见光—红外光X射线、伽马射线—紫外光—红外光—可见光微波、无线电微波、无线电—紫外光—可见光—红外光— X射线、伽马射线答案解析:无数字图像的() [单选题]空间坐标离散,灰度连续灰度离散,空间坐标连续两者都是连续的两者都是离散的(正确答案)答案解析:无图像灰度量化用6比特编码时,量化等级为() [单选题]32个64个(正确答案)128个256个答案解析:无采用幂次变换进行灰度变换时,当幂次取大于1时,该变换是针对如下哪一类图像进行增强 [单选题]图像整体偏暗图像整体偏亮(正确答案)图像细节淹没在暗背景中图像同时存在过亮或过暗背景答案解析:无图像灰度方差说明了图像哪一个属性 [单选题]平均灰度图像对比度(正确答案)图像整体亮度图像细节答案解析:无计算机显示器主要采用哪一种彩色模型 [单选题]RGB(正确答案)CMY或CMYKHISHSV答案解析:无采用模板[-1 1]T主要检测()方向的边缘 [单选题]水平(正确答案)45垂直135答案解析:无下列算法中属于图象锐化处理的是:( ) [单选题]低通滤波加权平均法高通滤波(正确答案)中值滤波答案解析:无维纳滤波器通常用于 [单选题]去噪减小图像动态范围复原图像(正确答案)平滑图像答案解析:无彩色图像增强时,______处理可以采用RGB彩色模型 [单选题] 直方图均衡化同态滤波加权均值滤波(正确答案)中值滤波答案解析:无滤波器在对图像复原过程中需要计算噪声功率谱和图像功率谱。
第42卷第l0期 Vo1.42 NO.10 红外与激光工程
Infrared and Laser Engineering 2013年l0月
oct.2013
结合图像信息熵和特征点的图像配准方法 吴泽鹏1,2,郭玲玲1,2,朱明超 ,贾宏光 ,宣明 (1.中国科学院长春光学精密机械与物理研究所,吉林长春130033; 2.中国科学院大学,北京100049)
摘 要:在分析当前主要的图像配准技术之后,针对图像特征点的分布和同名点的匹配问题,提出了 结合图像信息熵和特征点的图像配准方法。首先对图像进行一定程度的分块,根据信息论的方法,计 算每一块的信息熵,信息熵的大小基本反映了各个模块的纹理变换情况。然后根据各个模块的信息熵 大小,进行图像的粗匹配。之后在各个模块提取出一定数目的特征点,信息熵大,纹理信息丰富,选取 的特征点就相应较多,反之则纹理信息变化不大,选取的特征点数目较少。最后根据这些具有代表性 的同名点进行精确匹配。为验证该方法的有效性,对两幅图像进行传统方法和改进的图像配准方法的 比较。 关键词:图像配准; 信息熵; 特征点; 同名点 中图分类号:TP391.4 文献标志码:A 文章编号:1007—2276(2013)10—2846-07
Improved‘ ge regf;tration 。 feature points  ̄mbinedImproved image registration using I-eature points comDined with image entropy
Wu Zepeng ,Guo Lingling ,Zhu Mingchao ,Jia Hongguang ,Xuan Ming (1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China 2.University of Chinese Academy of Sciences,Beijing 100049,China)
∙Open Source Computer Vision Library ∙∙ 论坛 ∙ 商业 ∙ 专题 ∙ 讲座 ∙ 例程 ∙ 安装 ∙ 常见问题 ∙ 函数说明Cv 图像处理Wikipedia ,自由的百科全书注意:本章描述图像处理和分析的一些函数。
大多数函数都是针对两维象素数组的,这里,我们称这些数组为“图像”,但是它们不一定非得是IplImage 结构,也可以是CvMat 或者CvMatND 结构。
目录[隐藏]∙ 1 梯度、边缘和角点o 1.1 Sobelo 1.2 Laplaceo 1.3 Cannyo 1.4 PreCornerDetecto 1.5 CornerEigenValsAndVecso 1.6 CornerMinEigenValo 1.7 CornerHarriso 1.8 FindCornerSubPixo 1.9 GoodFeaturesToTrack∙ 2 采样、插值和几何变换o 2.1 InitLineIteratoro 2.2 SampleLineo 2.3 GetRectSubPixo 2.4 GetQuadrangleSubPixo 2.5 Resizeo 2.6 WarpAffineo 2.7 GetAffineTransformo 2.8 2DRotationMatrixo 2.9 WarpPerspectiveo 2.10 WarpPerspectiveQMatrixo 2.11 GetPerspectiveTransformo 2.12 Remapo 2.13 LogPolar∙ 3 形态学操作o 3.1 CreateStructuringElementExo 3.2 ReleaseStructuringElemento 3.3 Erodeo 3.4 Dilateo 3.5 MorphologyEx∙ 4 滤波器与色彩空间变换o 4.1 Smootho 4.2 Filter2Do 4.3 CopyMakeBordero 4.4 Integralo 4.5 CvtColoro 4.6 Thresholdo 4.7 AdaptiveThreshold∙ 5 金字塔及其应用o 5.1 PyrDowno 5.2 PyrUp∙ 6 连接部件o 6.1 CvConnectedCompo 6.2 FloodFillo 6.3 FindContourso 6.4 StartFindContourso 6.5 FindNextContouro 6.6 SubstituteContouro 6.7 EndFindContourso 6.8 PyrSegmentationo 6.9 PyrMeanShiftFilteringo 6.10 Watershed∙7 图像与轮廓矩o7.1 Momentso7.2 GetSpatialMomento7.3 GetCentralMomento7.4 GetNormalizedCentralMomento7.5 GetHuMoments∙8 特殊图像变换o8.1 HoughLineso8.2 HoughCircleso8.3 DistTransformo8.4 Inpaint∙9 直方图o9.1 CvHistogramo9.2 CreateHisto9.3 SetHistBinRangeso9.4 ReleaseHisto9.5 ClearHisto9.6 MakeHistHeaderForArrayo9.7 QueryHistValue_1Do9.8 GetHistValue_1Do9.9 GetMinMaxHistValueo9.10 NormalizeHisto9.11 ThreshHisto9.12 CompareHisto9.13 CopyHisto9.14 CalcHisto9.15 CalcBackProjecto9.16 CalcBackProjectPatcho9.17 CalcProbDensityo9.18 EqualizeHist∙10 匹配o10.1 MatchTemplateo10.2 MatchShapeso10.3 CalcEMD2[编辑]梯度、边缘和角点[编辑]Sobel使用扩展 Sobel 算子计算一阶、二阶、三阶或混合图像差分void cvSobel( const CvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size=3 );src输入图像.dst输出图像.xorderx 方向上的差分阶数yordery 方向上的差分阶数aperture_size扩展 Sobel 核的大小,必须是 1, 3, 5 或 7。
收稿日期:2006-06-29 修回日期:2006-08-05第24卷 第08期计 算 机 仿 真2007年08月文章编号:1006-9348(2007)08-0191-03PET -CT 双模图像配准黄中华,杨新,王利生(上海交通大学模式识别与人工智能所,上海200240)摘要:目前,医疗图像设备层出不穷,各种图像格式相继诞生。
医疗图像所包涵的信息丰富程度和准确度直接影响到医生诊断治疗的结果。
此篇文章以提供信息更为丰富、更为准确的多模图像,以便于医生临床的诊断治疗为目的,应用了刚性校正与双线性插值算法,以及聚类算法实现单模态PET 与PET 图像之间的配准,CT 与CT 图像之间的配准,与PET -CT 图像的双模配准,这些方法在实际临床医学应用中有着重要的用途,对医生判断病灶的情况和确切位置有很大的帮助。
关键词:正电子断层扫描;配准;单模态;多模态;聚类中图分类号:TN957.52 文献标识码:APET -CT Duple -m odality I m age R egistra tionHUANG Zhong -hua ,YANG X in ,WANG L i-sheng(Institute o f Im ag e P rocessing Eng.,Shangha i Jiao tong U n iv .,Shangha i 200240,Ch i na)AB STRACT :N ow aday s there a re d ifferent k i nds o f m edica l i m ag i ng equ i p m ents accompan i ed w ith d ifferent k i nds o f m edica l i m age s .T he i n for m a tion an i m age con ta i ns and its accuracy have an d irect i m pact on t he m ed i ca l d iagnos is and therapy resu lts .T h i s paper a i m s a t p rov id i ng do cto rs w ith i m ages w h ich hav e m ore info r m a ti on and m ake the d i agnos i s and the rapy convenient .It uses the m e thods of stiff adjust m ent ,b ili nea r inte rpose and the cluster ing a rithm etic .A s a resu lt ,t he reg istra ti ons o f PET and PET,CT and CT,then PET and CT a re realized .T hese m ethods have deep i n fl uence on the app li ca ti on o f prac tical c lin i c m ed ica l skill and it he lps the docto rs to add re ss the fo cus easily .K EY W ORDS :PET;I m ag e reg istration ;S i ng le m oda lity ;M u lti m oda lity ;C l uste r i ng1 引言正电子断层扫描(positron em iss i on co m pute r tom ography ,PET )是利用回旋加速器产生放射性同位素18F 、13N,静脉注射后参与人体的新陈代谢。
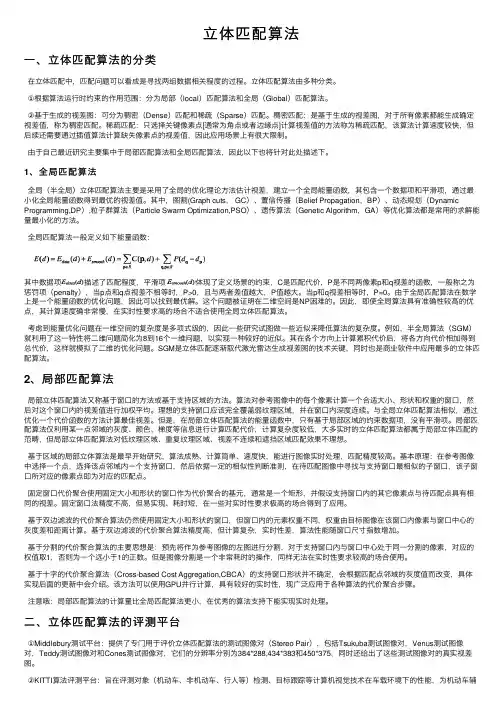
⽴体匹配算法⼀、⽴体匹配算法的分类在⽴体匹配中,匹配问题可以看成是寻找两组数据相关程度的过程。
⽴体匹配算法由多种分类。
①根据算法运⾏时约束的作⽤范围:分为局部(local)匹配算法和全局(Global)匹配算法。
②基于⽣成的视差图:可分为稠密(Dense)匹配和稀疏(Sparse)匹配。
稠密匹配:是基于⽣成的视差图,对于所有像素都能⽣成确定视差值,称为稠密匹配。
稀疏匹配:只选择关键像素点[通常为⾓点或者边缘点]计算视差值的⽅法称为稀疏匹配,该算法计算速度较快,但后续还需要通过插值算法计算缺失像素点的视差值,因此应⽤场景上有很⼤限制。
由于⾃⼰最近研究主要集中于局部匹配算法和全局匹配算法,因此以下也将针对此处描述下。
1、全局匹配算法全局(半全局)⽴体匹配算法主要是采⽤了全局的优化理论⽅法估计视差,建⽴⼀个全局能量函数,其包含⼀个数据项和平滑项,通过最⼩化全局能量函数得到最优的视差值。
其中,图割(Graph cuts, GC)、置信传播(Belief Propagation,BP)、动态规划(Dynamic Programming,DP),粒⼦群算法(Particle Swarm Optimization,PSO)、遗传算法(Genetic Algorithm,GA)等优化算法都是常⽤的求解能量最⼩化的⽅法。
全局匹配算法⼀般定义如下能量函数:其中数据项描述了匹配程度,平滑项体现了定义场景的约束,C是匹配代价,P是不同两像素p和q视差的函数,⼀般称之为惩罚项(penalty),当p点和q点视差不相等时,P>0,且与两者差值越⼤,P值越⼤。
当p和q视差相等时,P=0。
由于全局匹配算法在数学上是⼀个能量函数的优化问题,因此可以找到最优解。
这个问题被证明在⼆维空间是NP困难的。
因此,即使全局算法具有准确性较⾼的优点,其计算速度确⾮常慢,在实时性要求⾼的场合不适合使⽤全局⽴体匹配算法。
考虑到能量优化问题在⼀维空间的复杂度是多项式级的,因此⼀些研究试图做⼀些近似来降低算法的复杂度。
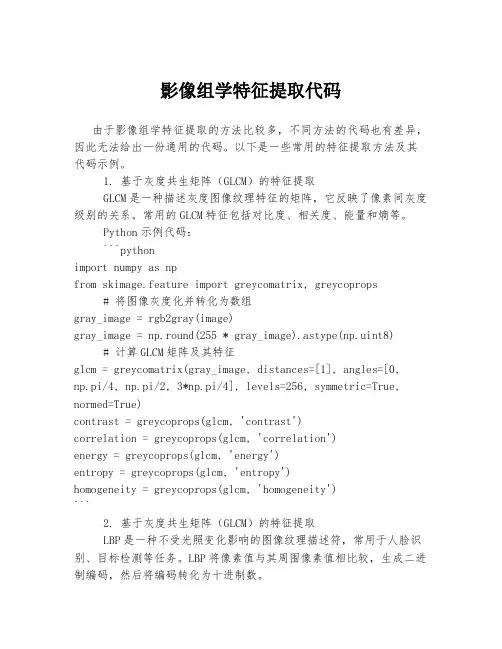
影像组学特征提取代码由于影像组学特征提取的方法比较多,不同方法的代码也有差异,因此无法给出一份通用的代码。
以下是一些常用的特征提取方法及其代码示例。
1. 基于灰度共生矩阵(GLCM)的特征提取GLCM是一种描述灰度图像纹理特征的矩阵,它反映了像素间灰度级别的关系。
常用的GLCM特征包括对比度、相关度、能量和熵等。
Python示例代码:```pythonimport numpy as npfrom skimage.feature import greycomatrix, greycoprops # 将图像灰度化并转化为数组gray_image = rgb2gray(image)gray_image = np.round(255 * gray_image).astype(np.uint8) # 计算GLCM矩阵及其特征glcm = greycomatrix(gray_image, distances=[1], angles=[0, np.pi/4, np.pi/2, 3*np.pi/4], levels=256, symmetric=True, normed=True)contrast = greycoprops(glcm, 'contrast')correlation = greycoprops(glcm, 'correlation')energy = greycoprops(glcm, 'energy')entropy = greycoprops(glcm, 'entropy')homogeneity = greycoprops(glcm, 'homogeneity')```2. 基于灰度共生矩阵(GLCM)的特征提取LBP是一种不受光照变化影响的图像纹理描述符,常用于人脸识别、目标检测等任务。
LBP将像素值与其周围像素值相比较,生成二进制编码,然后将编码转化为十进制数。