过载自动驾驶仪的设计
- 格式:doc
- 大小:1.37 MB
- 文档页数:10

基于零控脱靶量和状态观测器发布时间:2022-05-07T08:34:22.426Z 来源:《科学与技术》2022年1月2期作者:吴丹1 王欢2 [导读] 随着战争形态和战场形势演变吴丹1 王欢2陕西中天火箭技术股份有限公司陕西西安 710500陕西中天火箭技术股份有限公司陕西西安 710500摘要:随着战争形态和战场形势演变,面对高机动目标和精准打击需求,传统制导律性能愈发难以满足使用要求[1][2]。
高性能制导律设计的本质要求为对弹上信息与目标信息进行综合,在弹目遭遇点处保证脱靶量在允许范围内,本文基于零控脱靶量思想[3][4],设计了一种滑模制导律,并通过扩张状态观测器[5]实现了对目标机动信息和扰动的实时观测与补偿。
通过仿真对比表明,该制导律具有制导精度高、收敛时间快等特点,性能优于常用比例导引律。
制导律设计成果对工程实践具有一定的理论指导作用。
关键词:制导律;零控脱靶量;状态观测器;目标机动信息从图2可以看出,由于滑模制导律对目标机动信息进行了滤波估计和补偿,导致导弹过载全程出现较为明显的振荡现象;在比例导引律仿真中,导弹过载振荡情况与弹目距离成负相关性,导弹飞行初期过载振荡并不显著,随着弹目距离减小,导弹过载振荡情况愈发显著,在弹目遭遇点附近,导弹过载出现饱和情况。
3 结论本文设计了一种基于基于零控脱靶量和状态观测器的滑模制导律,并对其稳定性进行了证明。
通过与比例导引律的仿真结果对比表明,该制导律具有可对目标机动信息实时估计和补偿,制导精度高的优点,具有一定的工程应用价值。
制导律设计结果具有一定的在后续的研究工作中,应对制导律设计结果进行优化,降低目标机动引起的导弹过载遮振荡问题,并通过数学仿真和理论推导得到制导律各设计参数对制导精度,过载指令振荡等系能指标的影响。
4 参考文献[1] 薛丽华,范宇,宋闯. 现代导弹制导[M].北京:国防工业出版社,2013.[2] 林德福,王辉,王江,范军芳. 战术导弹自动驾驶仪设计与制导律分析[M].北京:北京理工大学出版社,2012.[3] 雷虎民,张旭,董飞垚,李炯. 零控脱靶量有限时间收敛制导律[J]. 国防科技大学学报,2015(6):136-141.[4] Tal ShimaM, Moshe Idan, OdedM.Golan. Integrated sliding mode autopilot-guidance for dual-control missiles[J]. JOURNAL OF GUIDANCE,CONTROL,AND DYNAMICS,2007(4),1081-1089.[5] 韩京清. 自抗扰控制技术[M]. 北京:国防工业出版社,2013.[6] 钱杏芳,林瑞雄,赵亚男. 导弹飞行力学[M]. 北京:北京理工大学出版社,2012.[7] Tal ShimaM, Moshe Idan, OdedM.Golan. Sliding-mode control for integrated missile autopilot guidance[J]. JOURNAL OF GUIDANCE,CONTROL,AND DYNAMICS,2006(2),250-260.[8] Tal ShimaM, Moshe Idan, OdedM.Golan. Integrated sliding mode guidance and control for a missile with on-off actuators[J]. JOURNAL OF GUIDANCE,CONTROL,AND DYNAMICS,2008(1),204-214.作者简介:(吴丹,女,汉族,宁夏回族自治区石嘴山市,1989.12,硕士,工程师,陕西中天火箭技术股份有限公司,航空宇航科学与技术;王欢,女,汉族,陕西省咸阳市,1989.10,硕士,工程师,陕西中天火箭技术股份有限公司,安全工程。

《基于多传感器信息融合的超限超载检测系统设计研究》篇一一、引言随着交通运输行业的迅猛发展,货车超限超载问题愈发突出,成为制约公路交通安全与正常运行的瓶颈之一。
针对此问题,本研究提出了基于多传感器信息融合的超限超载检测系统设计。
该系统能够实时、准确地监测车辆超限超载情况,有效提高公路运输的安全性和效率。
二、系统设计概述本系统设计以多传感器信息融合技术为核心,通过集成多种传感器设备,实现对车辆载重、尺寸、速度等多方面信息的实时采集与处理。
系统主要由传感器模块、数据处理模块、通信模块和显示模块组成。
三、传感器模块设计传感器模块是本系统的核心组成部分,主要包括重量传感器、尺寸传感器和速度传感器。
1. 重量传感器:通过压力传感技术,实时监测车辆载重情况,将载重信息转换为电信号输出。
2. 尺寸传感器:采用激光测距技术,对车辆的长、宽、高等尺寸进行测量,为超限检测提供依据。
3. 速度传感器:通过雷达或红外技术,实时监测车辆速度,为后续的数据处理提供参考。
四、数据处理模块设计数据处理模块负责接收传感器模块采集的数据,进行滤波、校正和融合处理。
1. 滤波处理:采用数字滤波技术,对原始数据进行去噪处理,提高数据的准确性。
2. 校正处理:通过校准算法,对传感器进行定期校准,确保数据的可靠性。
3. 信息融合:采用多传感器信息融合技术,将不同传感器的数据进行融合处理,提高检测的准确性和稳定性。
五、通信模块设计通信模块负责将处理后的数据传输至显示模块和上位机系统。
本系统采用无线通信技术,实现数据的实时传输。
六、显示模块设计显示模块负责将处理后的数据以直观的方式展示给用户。
本系统采用液晶显示屏,可实时显示车辆载重、尺寸、速度等信息,便于用户了解车辆超限超载情况。
七、系统实现与测试本系统采用模块化设计,便于后期维护和升级。
在系统实现过程中,需进行严格的测试与验证,确保系统的稳定性和准确性。
测试内容包括传感器精度测试、数据处理模块性能测试、通信模块传输测试等。

飞机电传操纵系统的前⽣今世B-2幽灵幽灵(Spirit)轰炸机⼀、机械式操纵系统⼈⼯操作机械操作系统⽰意图机械操纵系统最基本的飞⾏控制系统,常见于空⽓动⼒不是很强的早期飞机或现代的⼩型飞机。
这类飞控系统利⽤各种机械部件如杆、绳索、滑轮甚⾄链条将飞⾏员的操纵⼒从驾驶舱操纵装置传递到控制⾯上。
⼆、液压式操纵系统1、概述随着航空器尺⼨的增⼤和性能的提⾼,机械式飞⾏操纵系统的复杂程度和重量也⼤幅度增加,⼤⼤限制了航空器的发展。
为了克服这些限制,液压式飞⾏操纵系统出现了。
液压飞⾏操纵系统出现后,航空器的尺⼨和性能不再受驾驶员⼒量的限制,⽽只是受经济成本的限制。
液压式飞控系统由两部分组成:a、机械回路⼈⼯操作机械操作系统⽰意图机械回路连接着驾驶舱和液压回路。
如同机械式系统,机械回路也基本由各种杆、绞索、滑轮甚⾄铰链组成。
b、液压回路液压回路包含液压泵、液压管、液压阀门以及执⾏装置等。
执⾏装置通过液压泵产⽣的流体压⼒驱动飞机的各控制⾯。
⽽伺服阀则控制着执⾏装置的动作。
飞⾏员的操纵动作通过机械回路传递到液压回路中相应的伺服阀,然后液压泵驱动执⾏机构操纵飞机的各控制⾯。
液压式飞控系统见于⽼式的喷⽓运输机和⼀些⾼性能飞机。
例如安-225运输机和洛克西德公司的⿊鸟(SR-71)。
2、⼈⼯感觉反馈对于机械式飞控系统,飞⾏员经由机械装置可以感受到作⽤于飞机各个舵⾯上的⽓⼒。
这种触觉反馈增强了飞⾏安全性。
例如,在⽕神(Avro Vulcan)喷⽓轰炸机上,⼈们就利⽤⼀种弹性装置来实现这种控制反馈。
通过移动该装置的⽀点,⼈们可以使反馈⼒(对于升降舵)与空速的平⽅成正⽐。
这样,⾼速飞⾏时所需的操纵⼒量就迅速增加了。
3、机械助⼒助⼒机械操作系统⽰意图早期的飞机只是直接⼈⼯机械操纵。
随着飞机的尺⼨和速度的增加,驾驶员再直接通过钢索去拉动舵⾯感到困难,于是作为驾驶员辅助操纵装置的液压助⼒器安装在操纵系统中。
它由⼀个并联的液压作动器来增⼤驾驶员施加在操纵钢索上的作⽤⼒,⽬前液压助⼒器仍在许多飞机上使⽤。

ArduPilot 自动驾驶仪手册一、简介系统构成:1、一块ArduPilot Mega板(红色)2、一块ArduPilot Mega IMU板(红色)3、一套 MediaTek GPS 或者 uBlox GPS模块4、若干根接收机连接线及配套的插线,如果需要使用系统的自动驾驶和功能,推荐使用8通道接收机5、一套Xbee数传电台,一块Xbee数传电台与ArduPilot Mega IMU,另一块通过适配器与PC相连(提醒:因传送的数据量大,推荐配置空中速率位57600bps的数传电台,低速率数传电台将会导致严重的数据丢包现象)。
仔细阅读本手册,将有利于调试自动驾驶仪。
作为一套开源的自动驾驶仪,我们支持第三方传感器的接入,如空速计、电子罗盘等,这意味着您必须对本系统进行正确的参数设置,才能安全飞行。
二、快速入门指南(一)电路板的组装所需材料及工具:MEGA 板和IMU板各一块;板件连接插件若干;带连线的GPS模块(推荐4HZ);烙铁;焊丝等1、焊接MEGA机IMU板上的元器件2、对应安装好两块板子之间的连接插件3、两块板子相插4、连接GPS模块之后的样子,注意:GPS模块连接在红色MEGA板子上,而非蓝色IMU板子上的接口,IMU的6芯接口用于连接诸如电子罗盘等外接传感器。
(二)如何连接1、系统连接图其中,自动驾驶仪控制通道为第八通道,利用三段开关进行模式切换。
2、安装示意图因IMU板载三轴传感器,系统安装时需充分考虑到减震,尽量使其在飞机上水平安装,且安装方向应如上图所示。
3、DIP开关的使用因为接收机和配置文件之间会存在差异,可能会导致舵机出现反向工作,这时你可以通过拨动DIP开关进行修正,而非通过复杂的参数修改进行修正。
三、编程(一)所需工具1、MINI USB数据线,用于ardupilot与PC的相连。
2、配置软件arduino,下载地址/en/Main/Software(二)如何通过arduino进行编程1、通过USB连接arduino与PC,同时根据提示安装FT232RL驱动,并记下串口号。
—142—工装设计摘 要:本文将飞机控制增稳系统中的控制律设计作为具体实例,结合围绕飞机纵向以及横向的控制律和参数的选择,通过对比无控制增稳系统的飞机运行品质,最终证明具备飞机控制增稳系统能够优化飞机运行的荷兰滚模式品质,增强飞机运行的稳定性,使飞机品质能够满足设计要求。
关键词:增稳系统;控制律;荷兰滚飞机控制增稳系统设计中的控制律分析 申晓玲 蒙 杨(中航飞机股份有限公司汉中飞机分公司设计研究院,陕西 汉中 723000)前言:当前大多数高性能飞机的飞行包线范围增加,单单通过改变飞机的外形设计无法契合其低空低速、高空高速的需求。
飞机在飞行过程中容易出现横向震荡或纵向震荡,影响飞机的操纵性。
因此,有必要在飞机操纵系统中增加自动增稳装置,提升飞机的震荡阻尼比,优化其稳定性,满足增稳系统控制律设计的目的。
1纵向控制律分析1.1要求分析针对飞机纵向控制增稳的要求主要包含以下内容:飞行品质、纵向系统功能、系统权限、使用范围等。
部分飞机的纵向控制增稳系统功能配备了多模态自动驾驶仪,该设备具备定高、俯仰状态改平、自动拉起、自动俯仰配平、俯仰状态保持等性能。
一般飞机要求控制增稳系统需要在使用包线中完成全时运行,而自动驾驶仪的使用范围会对高度和姿态角进行限制。
对飞机飞行品质分析会对纵向短周期固频率、阻尼比、操纵期望参数、单位过载杆位/杆力移梯度等因素进行限制。
不过系统控制律在设计时需要确保飞机可以满足I 级品质要求。
例如,某飞机属于双操纵,因此自动驾驶与控制增稳的控制律应确保前后舱的飞行员拥有相同操纵感觉,同时系统的控制逻辑应保障前后舱的飞行员完成协调操纵合作[1]。
1.2控制律设计1.2.1增稳设计飞机纵向控制系统中设计增稳系统控制律是关键,控制律设计品质与飞机的飞行质量、自动驾驶仪的性能密切相关。
增稳控制律也就是内回路控制律,部分飞机的外挂构型数量和种类较多,因此飞行包线大,若只设置固定参数控制律将无法契合相关要求,其中控制律参数与速压、马赫数、高度相关。
飞机倒飞供油过程试验研究王京;鲁维【摘要】负过载供油试验是歼击类飞机设计定型必须进行的科目之一.本文以某型飞机负过载供油系统为研究对象,开展负过载供油试飞,对负过载供油时间进行考核.试验结果分析表明,倒飞期间飞机工作正常,负过载作用时间达到型号研制要求.本文提出的试飞方法为其他型号飞机的负过载供油能力的鉴定考核提供了方法.【期刊名称】《工程与试验》【年(卷),期】2015(055)001【总页数】4页(P47-49,79)【关键词】负过载;倒飞;飞行试验【作者】王京;鲁维【作者单位】中国飞行试验研究院,陕西西安710089;中国飞行试验研究院,陕西西安710089【正文语种】中文【中图分类】V228.1负过载飞行会经常在飞行中出现。
飞机的某些机动飞行,如慢滚、直线急速进入俯冲、螺旋、试飞中调整自动驾驶仪及倒飞等;阵风吹袭,如在水平飞行时遇下降气流或垂直俯冲时遇水平暴风等,这些情况可能在正常平飞、机动飞行时出现,也可能在意外情况失去操纵时出现[1]。
既然负过载飞行无可避免,所以有必要开展负过载供油飞行试验研究。
燃油系统倒飞试验的目的是测定飞机允许的倒飞时间等数据,全面验证倒飞装置设计方案、检查燃油系统供油可靠性、检验是否满足飞机型号规范中规定的发动机入口处燃油流量、压力等要求,尽早暴露问题,为确保飞机飞行安全提供试验依据。
本文对某型飞机负过载供油装置进行了飞行试验研究,对负过载作用时间、供油压力和供油流量等进行了分析,为该型飞机燃油系统的设计定型和改进提供了数据。
如果供油泵工作中断,会引起发动机停车。
所以,根据不同的飞行条件,保证连续地向发动机供油,是对燃油系统供油分系统提出的最基本要求之一。
只有燃油不间断地进入供油泵中,并且供油泵正常工作,才能保证连续地向发动机供油。
而在飞行中的各种不同过载下,油箱液面位置是不断变化的。
油箱油面的位置,通过计算作用在燃油上的惯性力和重力的合力来确定。
显然,油箱的油面将垂直于这个方向。
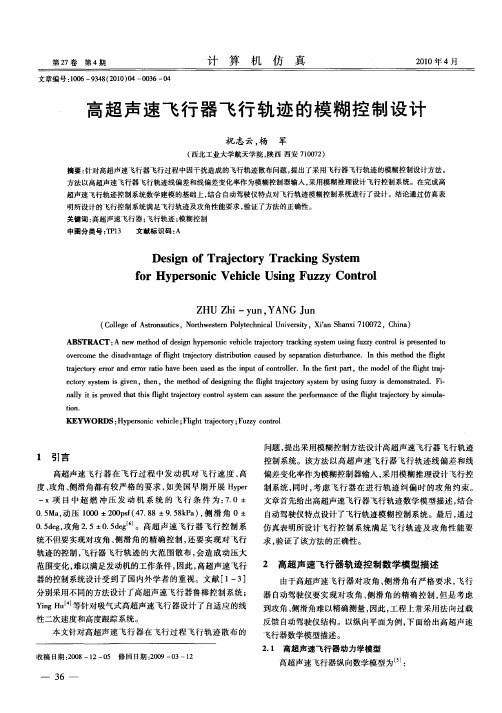
过载自动驾驶仪的设计 在许多高性能的指令制导或自寻的导弹中,经常能见到由一个加速度计提供主反馈,由一个陀螺仪作为阻尼器的布局结构。一般对于具有两个对称平面的导弹可以采用相同结构的驾驶仪来控制偏航和俯仰运动,因此,可以以一个通道为设计对象,以俯仰通道为例即可。加速度计放置在距离质心前c处,c为质
心到弹头部距离的12到23,敏感轴为Oy轴。应当避免放置在弹体主振形即一阶振形的波腹处,否则,颤振引起的反馈信息可能导致弹体结构遭到破坏,如果舵机系统的频带允许能够响应弹体的结构振动频率,舵面的偏转会加剧这一振动。陀螺仪也不应当放置在由于颤振引起的角运动最大的节点处,陀螺仪的敏感轴为Oz轴,即输出比例于。
yca221ssssskss
2
2122(1)21a
mmm
kAsAsTsTs
221
1(1)iTsAsAsV
csg
k
ack
zy
a
FIN SERVOAERODYNAMIC TRANSFER FUNCTION
BODY RATERATE GYRO
ACCELEROMETERLATERAL ACCELERATION OF CG
TOTAL LATERAL ACCELERATION SENSED BY THE ACCELEROMETER
图6.3-1 过载自动驾驶仪基本结构 图6.3-1表示了采取尾舵控制的弹体的驾驶仪的基本结构。首先,忽略陀螺仪和加速度计的动态延迟,在此假定它们的带宽都在80Hz以上,在感兴趣的频带范围内认为它们造成的延迟都是可以忽略的。第二,
假设舵机伺服系统的动力学环节以一个二阶系统来表示已经足够了。第三,分子中的小量()()yzass可以
忽略,即不考虑舵面升力产生的过载,参见公式4.6.7。因此,弹体的传递函数可以定义为稳态增益为ak的一个二阶系统(穿越频率为m,阻尼比为m)。在4.6节中建立的尾舵控制的静稳定弹体具备一个负的稳态增益ak。假设反馈器件的反馈量为正,输入指令减去这些反馈量构成的负反馈,则舵系统增益sk只能为负。 在不进行一些代数推导的情况下,从系统控制结构图能看出一些问题,首先,该驾驶仪是一个0型闭环系统,为了使闭环系统增益相对于气动增益的变化不敏感,应当使系统开环增益设计在10或更高,系
统的开环增益为(/)saacgkkkkV。第二,采取一定增益的反馈回路包围能够使驾驶仪的增益降低和带宽增加,因此一般假设开环系统的穿越频率可以近似为闭环系统的固有频率。例如,设计一个驾驶仪的最小带宽为40/rads(6.4Hz),需要明确对于伺服系统需要至少多大的带宽,由于驾驶仪的穿越频率至少在弹体气动自振频率的2到3倍,可以认为弹体气动特性是严重欠阻尼的,因此在驾驶仪的穿越频率附近导致了
接近180的相位滞后。从反馈器件来看,速率陀螺提供了一部分输出反馈为(/)gykVa,另外一部分为输出量的一阶微分反馈(/)giykTVa,因此速率陀螺测量的信号为(/1/)giykTsVVa。包含输出量ya一阶微分的反馈对于增强系统的稳定性是有利的。对于加速度计,由于放置在距离质心c处,因此它的反馈量包括质心运动的加速度加上角加速度乘以距离c,加速度计的总输出为2(//1)iycTsVcsVa。如果加速度
计放置在质心前,则0c,此时得到的总反馈信息为一定比例的输出量ya加上ya的一阶和二阶微分信息,实际上提供了ya的一个二阶超前系统,所有反馈均为负反馈。总反馈的信息为 2[(/)(//)(1/)]acigiacgacykcTVskTkVcVskkVa。
此时的分析虽然不是很精确,但已经明确必须尽可能的依靠目前的硬件布局条件设计出超前能力大于70的反馈校正网络。只有这样才能允许舵机系统在驾驶仪穿越频率处存在20~25的相位滞后,系统的相位裕度仍能保持50左右,这就意味着舵机系统的带宽必须至少为3到4倍的驾驶仪设计带宽,对于一个设计带宽为40/rads(6.4Hz)的驾驶仪可能需要带宽至少为150/rads(24Hz)的舵机系统。
现在不忽略()()yzass的情况下进一步准确一些考虑附加小分子的影响。按照公式4.6.7描述的话,
图6.3.1中的ak被置换为221(1)akAsAS。气动模型零点的引入也导致了从俯仰角速度到输出过载的传递函数()/()ysas的复杂化。将传递函数()/()yzass与()/()ysas相乘可以得到由公式4.6-8给出的公式()/()zss。
驾驶仪的总传递函数为:243243210()ycyaVbsVabsVababaasasasasa (6.3-1) 其中:01()()()acgsaabakVkababk 121[()()][()]sgacss
aabaabkakVabcababk
2221[1()]()sacsss
abaaabkVbcak
31(2)ssss
abak
42
1
ssak
为了设计尾舵控制的导弹的自动驾驶仪,必须首先作出对弹体所需气动特性的系数估计。假定设计导弹在500/ms的飞行速度下能产生2502/ms(25.5g)的法向加速度(下一章将讨论需用过载的指定)。定义导
弹平均飞行速度为500/ms,最大飞行速度为1.5500/ms,最小飞行速度为500/1.5/ms,即飞行速度变化为1到1.5倍之间。假设升力大小正比于攻角大小,并且定义弹体最大攻角为0.2rad(max11.5)。因此,单位攻角产生的弹道偏转角速率为: 1maxmax/()/(/)/(250/0.2)/5002.5yybYmVaVaVs
然而,尾舵控制的弹体由于翼身组合、控制面流场干扰等因素导致总升力下降,因此需要留出10%的估计误差余量,定义13.0bs。定义弹体特征长度()l为2m,被动段质量()m为52kg,转动惯量zJ为
142kgm。单位攻角产生的静稳定力矩a可以由b及静稳定度决定,考虑到将来对弹体的控制,需要为弹翼选取合适的位置,先初步定义弹体静稳定度为4~5%的弹体总长,需要指出,这个量会随着马赫数和攻角有所变化。
此时,*zMYx(*x为静稳定度,对于静稳定弹体*0x),/zzaMJ,/()bYmV,如果定义*0.09xm(弹体长度的4.5%), **2///525003.00.09/14500zzzzaMJYxJmVbxJs
现在讨论对升降舵能力的要求,如果控制力臂()l为弹体一半长度的3/4,即l=0.75m,静稳定度为*0.09xm,那么以最大舵偏角为0.24rad(max13.8)的控制力矩来平衡静稳定力矩,需要满足,
*maxmaxYlYx,*maxmaxblbx
*1maxmax0.30.20.090.30.240.75bxbsl
稳定的弹体转动速率决定了稳定的法向过载输出,此时由于弹体阻尼造成的负向阻尼力矩将降低升降舵的控制力矩效率,给出设计余量,令10.36bs,弹体阻尼一般很小,没有必要精确的定义,大致定义
阻尼力矩系数13.0as,根据控制力矩的力臂长度,可以得到, 2///0.36525000.75/14500zzzzaMJYlJbmVlJs
由于za,即该系数表征了控制力矩造成的弹体转动加速能力,因此该参数对于驾驶仪的响应速度来说是关键的一个参数。稍后将进一步检验参数a能否满足驾驶仪响应速度要求。暂时选择加速度计放置为质心前0.5m处,得到的控制系统相关参数如下: m=52kg zJ=142kgm L=2m *x=0.09m(4.5%)
l=0.75m max=0.2rad max=0.24rad maxya=2502ms
1()Vms 2()as 2()as 1()as 1()bs 1()bs ()cm
500 500 500 3.0 3.0 0.36 0.5 目前,余下的5个参数将成为控制系统中的调节参数,需要进行优化处理的这5个参数为sk、s、s、ack、gk,首先尝试在不引入任何补偿回路的情况下进行设计。 对驾驶仪的要求会如何提出?假设名义上的制导回路增益为102/msm(即1m的位置误差将产生102/ms的加速度指令),因此如果假设自动驾驶仪是足够快的情况下,制导回路的带宽为
103.2/(0.5)radsHz,在引入超前校正网络后能够提高到5/(0.8)radsHz,因此在工作频带2~12/rads
范围内驾驶仪应当具备较小的相位滞后。对驾驶仪最大相位滞后的要求可以确定为:5/rads时不大于15,10/rads时不大于30。这也就是对于该特性的系统要求驾驶仪带宽不小于40/rads(6.4Hz)的原因。在使用了前馈补偿方式的系统中,需要考虑开环增益10%的浮动,但是在导弹极限速度的考虑可能还必须允许该百分比增加一些。
Autopilot10
2
1
sc
yy
y
a
三点法导引的制导外回路基本结构 在设计中还会遇到对于稳定性要求的设计指标,诸如时域内的超调百分比、频域内的幅值裕度和相位裕度等,在共振频率处还需要考虑一定的阻尼比来限制等效噪声带宽。设计的驾驶仪在各个特征点处均需满足要求,还必须注意舵机系统的增益和带宽,确保在存在的噪声激励下出现饱和,基于这些考虑,对于舵机系统,设计者又需要确定出尽可能低的增益和尽可能窄的带宽,这样导致了伺服机构速率的降低。 现在已经意识到对于任何闭环系统而言,开环增益是一个最基本的变量,是前向增益和反馈增益的乘积。处于便利起见,定义驾驶仪的增益为1,则闭环增益基本确定为1,速率陀螺提供了部分反馈情况下,
加速度计增益(ack)可以定为0.8以达到近似1的反馈增益。在参数调节实践中,可以将该加速度计反馈增益变成原来的1/10,舵机系统增益乘以10,开环增益并不发生任何变化,但在这种情况下闭环增益将不再是1。 以一个较为详细的例子说明,设计目标是满足开环增益为10的制导回路,并设计驾驶仪闭环增益为1,在这种情况下,将反馈增益除以10,舵机增益乘以10,开环增益并未改变,但驾驶仪闭环增益变成10,因此,误差检验装置的增益必须变成1才能保证制导系统开环增益仍然为10。显然,上述两种系统对于特定制导误差输入情况下,舵机系统输出量应该是一致的。 可以认为:设计完整的闭环系统时,分系统的增益只是处于方便而定义,电压输出是可以改变的,真正有意义的还是主回路或者辅助回路的开环增益。