无人机自动驾驶仪
- 格式:docx
- 大小:1.05 MB
- 文档页数:11
世界无人机大全--------------------------------------------------------------------------作者: _____________ --------------------------------------------------------------------------日期: _____________世界无人机大全诺斯罗普·格鲁曼公司的RQ-4A“全球鹰”是美国空军乃至全世界最先进的无人机。
作为“高空持久性先进概念技术验证”(ACTD)计划的一部分,包括“全球鹰”和“暗星”两个部分在内的“全球鹰”计划于1995年启动。
ACTD计划最初由国防先进研究项目处管理,1998年10月转由怀特·帕特森空军基地的空军系统计划办公室接管。
后来“暗星”计划于1999年1月取消。
“全球鹰”的研制计划分为三部分:设计,研制与试验,部署和评估。
相关厂商包括电气系统ES公司,信息科技IT公司,综合系统IS公司,舰船系统和构成公司。
贴子相关图片:2Northrop Grumman 公司已经从机身制造公司Schweizer航空器集团接收了第一架RQ-8A配备火力的垂直升降无人侦察机.Northrop Grumman公司正在试飞一架此型飞机的有人驾驶型号来测试其执行任务的能力.此型飞机将提供给美国海军和海军陆战队来实施侦察,位置预料和支持目标精确打击.此型飞机能在任何配有航空装置的战舰和狭小的陆地上起飞.它配有电子红外传感器和激光指示器,能覆盖从起飞地方圆110海里的区域.第一批此型飞机将配给海军陆战队,包括三架飞机,两个地面控制基地,一套数据连接系统,远程数据终端等设施.贴子相关图片:3据AAI公司称,“影子-200”无人机参与了许多著名的战斗,其中之一是捕获了绰号为"金刚石之王"的萨达姆高级副官之一,在另一次战斗中,“影子”无人机完成了侦察任务,从而使美国部队成功解除了一支支持萨达姆的伊朗游击队武装。
无人机警用解决方案无人机警用系统解决方案一、无人机警用系统行业概述1.行业概述无人机凭借成本低、易操纵、高度灵活和稳定等优点,能够完成空中监控、日常巡逻、搜索跟踪等任务,受到了警务部门的青睐。
公安干警和武警利用无人机来应对突发的社会事件,交警部门则用无人机来进行交通方面的管理,特警部门则利用无人机进行空中侦察抓捕罪犯等工作。
总之,警用无人机在未来将会协助各个警察部门在公共安全领域发挥更为重要的作用。
2.行业应用【 1】无人机在社区民警领域的应用一般而言,社区民警时公安派出所从事治安防范、管理和沟通群众的主要力,主要承担的职责有六项,即开展群众工作、掌握社情民意、管理实际人口、组织安全防范以及维护治安秩序、应急救助等服务。
对于管辖范围较大、人口较为密集的地区,无人机的装备无疑为社区民警的工作带来了极大的提升。
(1)公共领域的常规巡查对于片区治安来说,巡查是社区民警必不可少的一项工作。
但是对于管辖区域大、人口密集且分散分布的地区,由于警务力量不足等因素,可能造成巡查存在漏洞,给犯罪分子以可乘之机。
无人机一般可携带多种警务设备,包括高清数码摄像机、夜视仪等,可以帮助社区民警对管辖区域进行定时定线地巡查。
不仅可以节省警务力量,而且有利于公安部门及时掌握相关区域的公共安全状况。
(2)大型集会的监控无人机可对会场空中监控,提供高清画面,并可以快速机动到任何需要的区域上空,搜索发现地面可疑人员、车辆,提供强有力的空中情报保障。
将视频图像实时传输回指挥中心,指挥中心根据无人机传输回的资料对现场实时掌控,一旦发现突发情况,无人机可以第一时间发现,极大地提高了应急处理效率。
(3)聚众闹事事件的监控无人机飞抵事故目标区域上空对目标区域进行全方位不间断的监控,为公安干警全面掌控事态提供了先决条件。
警方可根据无人机拍摄的资料对事故责任方进行举证,同时可以了解目标区域的事件发展情况,及时形成相应的决策,防止事态失控。
(4)应对突发媒介失灵事件面对因谣言而发生的群众聚集事件,无人机加装空投装置后,能进行特殊物品的投送,如播撒传单,向地面人员传递信息,达到辟谣效果。
无人机简介1、什么是无人机(UAV)无人机(Unmanned Aerial Vehicle),无人航空器是指不搭载操作人员的一种动力空中飞行器,采用空气动力为飞行器提供所需的升力,能够自动飞行或远程引导;既能一次性使用也能进行回收;能够携带致命性和非致命性有效负载。
无人机与各种导弹等无人武器系统的区别:(1)无人机在飞行结束后可以收回,导弹不能。
(2)无人机携带的弹药并不与机身形成一体,而导弹的弹头整合在弹体内。
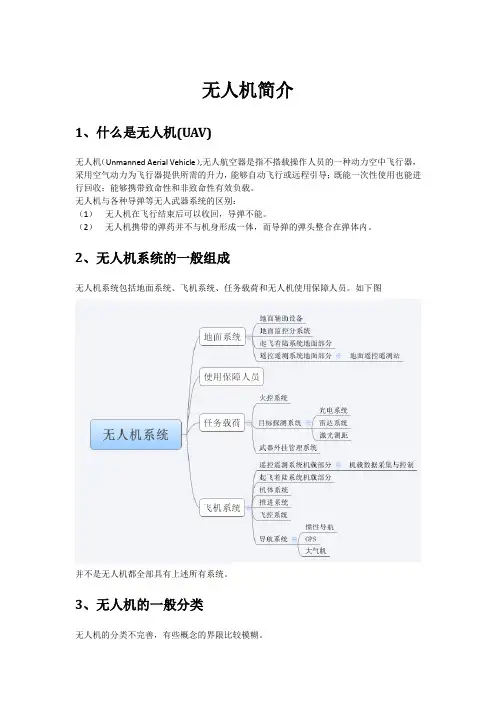
2、无人机系统的一般组成无人机系统包括地面系统、飞机系统、任务载荷和无人机使用保障人员。
如下图并不是无人机都全部具有上述所有系统。
3、无人机的一般分类无人机的分类不完善,有些概念的界限比较模糊。
按起飞重量分:按用途分:无人侦察机、电子战无人机、靶机、反辐射无人机、对地攻击无人机、通信中继无人机、火炮较射无人机、特种无人机、诱饵无人机。
按飞行方式分:固定翼无人机、旋翼无人机、扑翼无人机、飞艇4、无人作战飞机的组成:典型的无人作战飞机的组成如下图:(1)飞行器平台:任务承载平台,根据不同的任务进行气动布局和气动力设计。
(2)动力系统:(3)自主飞行控制系统:无人机的飞行控制系统是无机机系统的核心,负责控制飞机完成自主飞行、着陆、出航等任务。
(4)信息处理与传输系统:无人机配备的数据链系统、战术信息收发系统。
用于无人机和地面控制站、卫星、军舰等进行信息交流、传递情报、接受指令。
(5)目标探测系统:用于探测目标的传感器,包括红外成像、SAR雷达、激光测距等(6)武器系统:提供武器控制和投放(7)目标识别:包括敌我识别、目标识别和目标细节识别(8)精确导航:包括惯导、GPS、多普勒导航等(9)起降系统:现役的无人机起飞和着陆基本上依靠地面来操作,未来的无人机系统向自主起飞、着陆和空中机动的能力。
(10)空域管理系统:包括冲突检测和防撞系统、着陆辅助装置等(11)自主攻击决策系统:无人作战飞机完成作战任务的主要系统。
无人机综合知识简介Revised on November 25, 2020无人机综合知识简介1、无人机(UAV)的概念无人机(Unmanned Aerial Vehicle)就是利用无线遥控或程序控制来执行特定航空任务的飞行器,指不搭载操作人员的一种动力空中飞行器,采用空气动力为飞行器提供所需的升力,能够自动飞行或远程引导;既能一次性使用也能进行回收;能够携带致命性和非致命性有效负载。
2、无人机系统的一般组成无人机系统包括地面系统、飞机系统、任务载荷和无人机使用保障人员。
如下图:3、无人机的一般分类按用途分:无人侦察机、电子战无人机、靶机、反辐射无人机、对地攻击无人机、通信中继无人机、火炮较射无人机、特种无人机、诱饵无人机。
按飞行方式分:固定翼无人机、旋翼无人机、扑翼无人机、飞艇。
4、无人机的飞行控制无人机上没有驾驶员,所以无人机和飞行靠“遥控”或“自控飞行”。
(1)遥控飞行遥控即对被控对象继续远距离控制,主要无线电遥控。
遥控信号:遥控站通过发射机向无人机发送无线电波,传递指令,无人机上的接收机接收并译出指令的内容,通过自动驾驶仪按指令操纵舵面,或通过其他接口操纵机上的任务载荷。
遥控站设有搜索和跟踪雷达,他们测量无人机在任意时刻相对地面的方位角、俯仰角、距离和高度等参数,并把这些参数输入到计算机,计算后就能绘出无人机的实际航迹,与预定航线比较,就能求出偏差,然后发送指令进行修正。
此外,无人机还装备有无线电应答器,也叫信标机。
它能在收到雷达的询问信号后,发回一个信号给雷达。
由于信标机发射的信号比无人机发射的雷达信号要强得多,起到增加跟踪雷达的探测距离。
下传信号:遥控指令只包含航迹修正信号是显然不够的,在飞行中无人机会受到各种因素的影响,无人机的飞行姿态也在不断变化,所以指令还需要包括对飞行姿态的修正内容。
无人机上的传感器一直在收集自身的姿态信息,这些信息通过下传信号送到遥测终端,遥测终端分析这些信息后就能给出飞行姿态的遥控修正指令。
无人机在海上救援行动中的应用现状及发展展望摘要:随着海军不断向中远海发展、执行任务的范围不断拓展,简要介绍了无人机的特点和在搜救领域中的优势,详细分析了无人机在近岸救援及海上救援行动中的应用现状,对无人机在医疗救援物资投送、海上伤员转送等海上军事救援行动中的应用前景进行了展望。
关键词:无人机;海上搜救;发展引言自1913年世界上出现第一台自动驾驶仪以来,无人机越来越受到重视,发展迅猛。
无人机是由无线电遥控设备和自备的程序控制装置实现飞行控制,操作人员通过全球定位系统、雷达、无线数传等进行跟踪、定位、遥控、遥测以及数字信号传输。
无人机本身不能自主完成任务,因此需要配置严密的控制系统和与任务相关的应用设备,一般也将无人机称为无人机系统。
无人机燃油需求少、成本低,在地震、洪灾等突发灾害事件救援中可进行现场实时监视、伤员搜寻、医疗用品运送和伤员转运、通信中继和灾情评估等工作,已逐渐成为医学救援领域中不可替代的重要装备。
1无人机的分类无人驾驶飞机(即无人机,Un-mannedAerialVehicles)是一种有动力、可控制、能携带多种设备、执行多项任务,并可以重复使用的无人驾驶航空器。
对无人机的分类,主要按照其平台构型来分类,可分为固定翼无人机、无人直升机和多旋翼无人机三大平台等。
按不同领域和用途分类,可分为军用、民用和消费级三类。
按尺寸分类,无人机可分为微型、轻型、小型和大型无人机。
按活动半径分类,可分为超近程、近程、短程、中程和远程无人机。
按任务高度分类,可分为超低空、低空、中空、高空和超高空无人机。
2无人机在卫勤中的应用2.1非战争军事行动领域在灾害救援方面,微型低空无人机在2008年"5·12汶川地震"中用于灾区航拍,采集重灾区图像资料及视频影像数据,评定受灾情况。
在高原、高海拔、高寒等特殊地理条件下,无人机被用于地质灾害调查、公路等基建设施测量、矿区测绘等领域。
2.2平时医学救援领域2016年6月,某科技公司研发的T60行业无人机首次应用于澳大利亚海上救援行动中,实现对海域的救援、实时监控、情境感知、释放救援物资等。

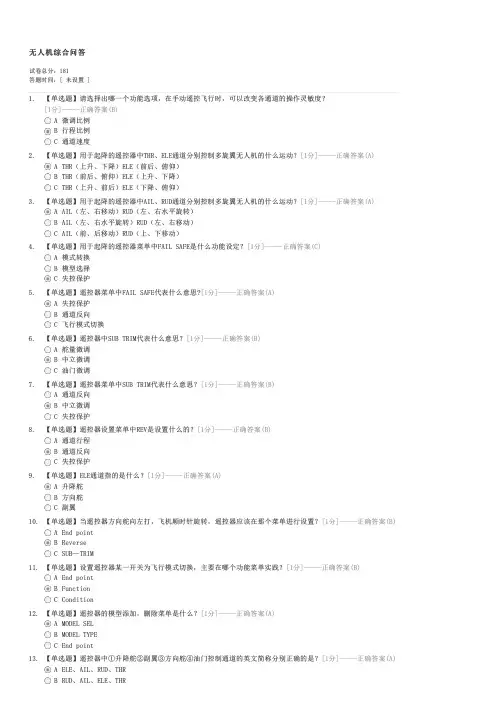
1+X无人机试题+答案一、单选题(共100题,每题1分,共100分)1.多轴飞行器的遥控器一般有A、4个及以上通道B、2个通道C、3个通道正确答案:A答案解析:一般4个以上通道2.气流沿机翼表面附面层类型的变化是A、可由层流变为紊流B、一般不发生变化C、可由紊流变为层流正确答案:A答案解析:气流沿机翼表面附面层类型的变化是由层流变为紊流3.飞机坡度增大,升力的垂直分量A、增大B、减小C、保持不变正确答案:B答案解析:参照力的分解,坡度增大时,垂直分量减小,水平分量增加4.以下飞行器不是多轴飞行器的是A、Uh-60黑鹰B、PhAntom精灵C、Inspire悟正确答案:A答案解析:A选项是直升机5.无人机驾驶员关于无人机飞行速度范围不需要了解的是A、极限高度外的速度范围B、海平面不同重量下的速度范围C、极限高度内的速度范围正确答案:A6.从事飞行的民用航空器不需要携带的文件是A、民用航空器适航证书B、飞行人员相应的执照或合格证C、飞行记录本正确答案:C7.自动驾驶仪中的陀螺是用来测量哪些物理量A、飞机角速度或飞机姿态B、飞机角速度或飞机姿态角C、飞机角速率或飞机姿态角正确答案:B8.机翼1/4弦线与垂直机身中心线的直线之间的夹角称为机翼的A、后掠角B、安装角C、上反角正确答案:A答案解析:后掠翼定义是机翼1/4弦线与垂直机身中心线的直线之间的夹角9.多旋翼动力系统由那几部分组成?每部分有几根线?A、电池(两根动力线),电调(三根线),电机(三根线)B、电池(两根动力线),电调(八根线),电机(两根线)C、电池(两根动力线),电调(八根线),电机(三根线)正确答案:C10.利用风可以得到飞机气动参数,其基本依据是A、牛顿定理B、相对性原理C、连续性假设正确答案:B答案解析:相对性原理是风洞实验的理论基础11.关于多轴飞行器机桨与电机匹配描述的是A、大螺旋桨要用低kv电机B、小螺旋桨要用高kv电机C、大螺旋桨要用高kv电机正确答案:C答案解析:大螺旋桨用低KV电机,小螺旋桨高KV电机;小螺旋桨因为需要用转速来弥补升力。
2016年无人机知识竞赛题库1) 无人机主要使用的是______空气的动力驱动的航空器。
A. 轻于B. 重于C. 等于D. 不确定答案:B2.远程无人机活动半径一般为: A. 50~200kmB. 200~800kmC. >800kmD. >8000km答案:C.3.______无人机飞行平台结构通常包括机翼、机身、尾翼和起落架等。
A. 单旋翼B. 多旋翼C. 固定翼D. 四轴答案:C.4.______无人机平台结构通常包括机架、支臂、脚架和云台等。
A. 单旋翼B. 多旋翼C. 固定翼D. 扑翼答案:B5.近程无人机活动半径在: A. 小于15kmB. 15~50kmC. 200~500 kmD. 500~800km答案:B6.任务高度一般在0~100m之间的无人机为:A. 超低空无人机B. 低空无人机C. 中空无人机D. 高空无人机答案:A7.军用无人机中,中高空长航时无人机多属于:A. 侦察型无人机B. 诱饵型无人机C. 无人靶机D. 自杀式答案:A.8.电动无人机动力系统主要由动力电机、__________和动力电源组成。
A. 电池B. 调速系统C. 无刷电机D. 螺旋桨答案:B.9.不属于无人机系统的是:A. 飞行器平台B. 飞行员C. 导航飞控系统D. 地面配套设施答案:B10.不属于无人机自动驾驶仪任务范畴的是:A. 数据中继B. 姿态稳定与控制C. 自主飞行控制D. 增稳答案:A.11.固定翼无人机纵向配平主要考虑的是__________沿纵轴的前后位置。
A. 气动焦点B. 发动机C. 重心D. 油心答案:C.12.无人机所搭载任务设备的重量主要受限制于:A. 空重B. 载重能力C. 最大起飞重量D. 最小起飞重量答案:B13.不属于无人机起飞方式的是:A. 弹射B. 滑跑C. 车载D. 滑翔答案:D14.神经元无人机由哪国研制装备: A. 美国B. 以色列C. 法国D. 日本答案:C15.目前民用无人机所采用的动力系统通常为汽油发动机和__________两种。
1+X 无人机模考试题含答案一、单选题(共100题,每题1分,共100分)1、自动驾驶仪中的陀螺是用来测量哪些物理量A、飞机角速度或飞机姿态B、飞机角速度或飞机姿态角C、飞机角速率或飞机姿态角正确答案:B2、无刷电机与有刷电机的区别有A、两类电机效率差不多B、有刷电机效率较高C、无刷电机效率较高正确答案:C答案解析:无刷电机效率高,所以用无刷电机3、无人机驾驶员进行起飞前动力装置检查内容不必包括A、发动机油量检查B、发动机启动后怠速转速、震动、稳定性检查C、发动机生产厂家检查正确答案:C4、目前无人机平台常用动力电池类型为锂聚电池,关于其特点错误的是?A、充满电压一般为4.7VB、无记忆效应C、标称电压一般为3.7V正确答案:A5、舵面遥控状态时,平飞中向右稍压副翼杆量,无人机A、右翼升力大于左翼升力B、左翼升力等于右翼升力C、左翼升力大于右翼升力正确答案:C答案解析:向右压杆就是向右转弯,左翼升力大于右翼升力6、姿态遥控模式下操纵无人机爬升,飞机速度减小太多时,下列正确的操纵是A、迅速增大俯仰角B、迅速减小俯仰角C、迅速关闭发动机正确答案:B7、在大气层内,大气压强A、随高度增加而减小B、随高度增加而增加C、在同温层内随高度增加保持不变正确答案:A答案解析:大气层内大气压强随高度增加而减小8、无人机定高平飞时,驾驶员面对地面站界面A、密切判断飞机的俯仰状态和有无坡度B、短暂休息,偶尔关注一下飞机状态C、切至自主控制模式,尽可放松休息正确答案:A9、飞机在地面效应区时,引起的气动力变化是A、升力增大、阻力减小B、升力减小、阻力增大C、升力增大、阻力增大正确答案:A答案解析:地面效应作用10、使用多旋翼飞行器作业A、不受环境影响B、应在人员密集区,如公园、广场等C、在规定空域使用,且起飞前提醒周边人群远离正确答案:C11、姿态遥控模式下操纵无人机爬升,俯仰角偏高时,下列正确的操纵是A、应柔和地向后带杆B、应柔和地向前顶杆C、应柔和地向右扭舵正确答案:B12、I级别无人机指:A、空机质量≤1㎏,起飞全重≤2.5㎏B、空机质量≤0.5㎏,起飞全重≤1.5㎏C、空机质量≤1.5㎏,起飞全重≤1.5㎏正确答案:C13、多旋翼飞行器的飞控指的是A、机载任务系统B、机载遥控接收机C、机载导航飞控系统正确答案:C答案解析:多旋翼飞行器的飞控指的是机载导航飞控系统,按功能可分为导航子系统和飞控子系统。
无人机自动驾驶仪
1.自动驾驶仪(autopilot):
按一定技术要求自动控制飞行器的装置。在有人驾驶飞机上使用自动驾驶仪是为了减轻
驾驶员的负担,使飞机自动地按一定姿态、航向、高度和马赫数飞行。飞机受暂时干扰后,
自动驾驶仪能使它恢复原有的稳定飞行状态,因此,初期的自动驾驶仪称为自动稳定器。自
动驾驶仪与飞机上其他系统交联还可实现对飞机的控制。在导弹上,自动驾驶仪起稳定导弹
姿态的作用,故称导弹姿态控制系统。它与导弹上的或地面的导引装置交联组成导弹制导和
控制系统,实现稳定和控制的功能。
1.1发展概况
1914年美国人E.斯派雷制成电动陀螺稳定装置,这是自动驾驶仪的雏型。30年代,为
了减轻驾驶员长时间飞行的疲劳,开始使用三轴稳定的自动驾驶仪。它的主要功用是使飞机
保持平直飞行。50年代,通过在自动驾驶仪中引入角速率信号的方法制成阻尼器或增稳系
统,改善了飞机的稳定性。50年代以来自动驾驶仪发展成为飞行自动控制系统。50年代后
期,又出现自适应自动驾驶仪,它能随飞行器特性的变化而改变自身的结构和参数。60~70
年代,数字式自动驾驶仪应运而生,它在“阿波罗”号载人飞船登月舱的登月过程中得到应
用。
1.2原理和组成
自动驾驶仪是模仿驾驶员的动作驾驶飞机的。它由敏感元件、计算机和伺服机构组成。
当某种干扰使飞机偏离原有姿态时,敏感元件(例如陀螺仪)检测出姿态的变化;计算机算出
需要的修正舵偏量;伺服机构(或称舵机)将舵面操纵到所需位置。自动驾驶仪与飞机组成
反馈回路,保证飞机稳定飞行。
1.3分类和特点
自动驾驶仪可按能源形式、使用对象、调节规律等分类。
①按能源形式:分为气压式、液压式、电气式或者是这几种形式的组合。现代超音速飞
机多安装电气(或电子)-液压式自动驾驶仪。气压式伺服机构主要用于导弹。
②按使用对象:分为飞机自动驾驶仪和导弹自动驾驶仪。飞机自动驾驶仪多具有检测飞
机姿态角的敏感元件,能稳定飞机的姿态角。为了提高这种自动驾驶仪的稳定效果,可配合
使用速率陀螺仪。战术导弹只需要稳定角速度,其姿态角根据目标的运动而改变,因此,在
自动驾驶仪中不设检测角位置的敏感元件。巡航导弹、战略导弹和运载火箭需要稳定姿态角,
在这些飞行器的自动驾驶仪中仍有检测姿态角的敏感元件。
③按调节规律:自动驾驶仪的调节规律(即数学模型)表示伺服机构的输出量与被调参
量之间的函数关系。飞机自动驾驶仪依调节规律的不同分为比例式自动驾驶仪和积分式自动
驾驶仪。比例式自动驾驶仪是以伺服机构输出的位置偏移量(如舵偏角)与被调参量(如姿
态角)的偏差成比例的原理工作的。它的结构简单,应用很广,但在干扰作用下会产生静态
误差。积分式自动驾驶仪是以伺服机构输出的位置偏移量与被调参量偏差的积分成比例的原
理工作的,它没有静态误差,但系统的稳定性差,结构复杂,应用受到一定限制。
导弹自动驾驶仪按被调参量的性质可分为位置式自动驾驶仪、定向式自动驾驶仪和加速
度式自动驾驶仪。位置式自动驾驶仪的被调参量是飞行器的角位置(即姿态角),伺服机构
的输出量与姿态角的偏差成比例。定向式自动驾驶仪的被调参量是飞行器的姿态角速度,伺
服机构的输出量与姿态角速度的偏差成比例。加速度式自动驾驶仪的被调参量是飞行器的法
向加速度,伺服机构的输出量与法向加速度的偏差成比例。
现代自动驾驶仪的趋势是向数字化和智能化方向发展。80年代以前,战术导弹由于工
作时间短、工作环境条件恶劣(如很大的过载)等较少采用数字式自动驾驶仪。微型计算机
出现后,战术导弹开始采用数字式自动驾驶仪。近代空战中,自动驾驶仪能以最佳方式操纵
战斗机,例如以最短的时间飞到最有利的位置。在导弹攻击目标时,自动驾驶仪与制导系统
配合使导弹能识别敌友、分析敌情变化并作出最优决策。这就要求自动驾驶仪具有智能的功
能。
2.其它公司无人机自动驾驶系统:
2.1硬件组成
内置传感器:三轴角速率陀螺 、三轴加速度计、三轴磁力计、双嘴空速传感器、气压
高度计、5Hz GPS接收机、温度传感器。
输入/输出接口:8路PWM输入、7路PWM输出、2路电源监视输入、2路转速传感器
输入、5路ADC、10路二进制遥测数据包、多功能LED指示灯。
数据交换接口:RS-232和RS-485。
扩展设备接口:RS-485接口 X 4(ABIP 协议),RS-232接口 X 2(NMEA 协议)。
选配外置传感器:空速高度组合传感器、超声波高度计、PWM信号和离散信号扩展器、
飞行数据记录器、油量传感器、GLONASS 或北斗GPS 接收机、用户定制设备等。
2.2技术指标
传感器量程:角速率150°/s,加速度10g,动压15 ~115 Kpa, 静压0 ~4 Kpa
空速量程:300 km/h(可扩展),精度±10 km/h(10°С ~ 60°С),分辨率2 km/h
气压高度:-1000 ~ 11000 m,精度±10 m(0°С~80°С),分辨率0.3 m,升降速率分
辨率0.25 m/s
姿态量程:滚转角±180°,精度0.1°;俯仰角±90°,精度0.1°;磁航向角±180°,
精度0.3°
温度量程:-25°С ~ 70°С,精度±3°С
工作电压:5.5v ~ 6v ,输入电压7v ~16v,工作电流300±10% mA / 6V
波特率:4800 ~115200
裸板重量:25 g,裸板尺寸:104 X 57 X 13 mm
带壳重量:150 g,外壳尺寸:125 X 65 X 40 mm
2.3技术指标
73 Hz 并行数据处理和采集。
RS-485 设备扩展总线。
多功能稳压器,驾驶仪、舵机、外置传感器、扩展设备分开供电。
可同时装载4个飞行计划:
每个飞行计划中,可装载 32 个控制图;可设置 64 个飞行状态(或航路点)、每个航
路点可定义 16 项控制参数;可设置 4 个中断状态和 10 个跳变状态
提供56个高速实时数据(姿态数据、测量数据、航行数据和惯导数据)以及224个控
制节点数据。
精确的多类型 PID 参数在线自动整定功能,系统调试简单方便快速。
适用于各种固定翼、直升机、特种飞行器、陆地、水面和水下机器人控制,以及载体的
独立数据采集分析系统。
2.4工作流程
2.5主要控件原理图