误差对性能影响
- 格式:doc
- 大小:317.00 KB
- 文档页数:14
浅谈电流互感器误差及影响摘要:电流互感器是一次系统和二次系统电流间的联络元件,将一次回路的大电流转换为小电流,供给测量仪表和保护装置使用。
电流反应系统故障的重要电气量,而保护装置是通过电流互感器来间接反应一次电流的,因此电流互感器的性能直接决定保护装置的运行。
然而从互感器本身和运行使用条件方面来看,电流互感器存在不可避免的误差,本文分别从这两个方面分析了误差,并结合实际工作阐述了误差带来的影响,以便在工作中加强重视,并做出正确的分析。
关键词:电流互感器 励磁电流 误差一、电流互感器的误差在理想条件下,电流互感器二次电流I 2=I 1/Kn ,Kn=N 2/ N 1 ,N 1 、N 2 为一、二次绕组的匝数,不存在误差。
但实际上不论在幅值上(考虑变比折算)和角度上,一二次电流都存在差异。
这一点我们可以从图中看到。
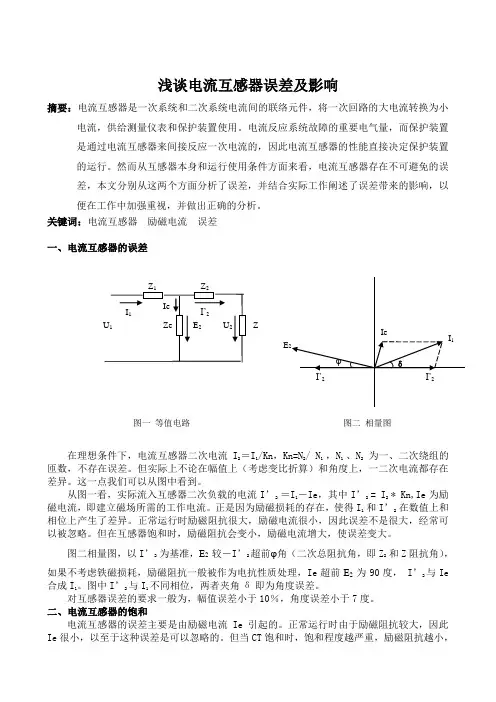
从图一看,实际流入互感器二次负载的电流I’2 =I 1-Ie ,其中I’2 = I 2 * Kn,Ie 为励磁电流,即建立磁场所需的工作电流。
正是因为励磁损耗的存在,使得I 1 和I’2 在数值上和相位上产生了差异。
正常运行时励磁阻抗很大,励磁电流很小,因此误差不是很大,经常可以被忽略。
但在互感器饱和时,励磁阻抗会变小,励磁电流增大,使误差变大。
图二相量图,以I’2 为基准,E 2 较-I’2超前φ角(二次总阻抗角,即Z 2 和Z 阻抗角),如果不考虑铁磁损耗,励磁阻抗一般被作为电抗性质处理,Ie 超前E 2 为90度, I’2与Ie 合成I 1。
图中I’2与I 1不同相位,两者夹角δ即为角度误差。
对互感器误差的要求一般为,幅值误差小于10%,角度误差小于7度。
二、电流互感器的饱和电流互感器的误差主要是由励磁电流Ie 引起的。
正常运行时由于励磁阻抗较大,因此Ie 很小,以至于这种误差是可以忽略的。
但当CT 饱和时,饱和程度越严重,励磁阻抗越小,Z图一 等值电路E 图二 相量图励磁电流极大的增大,使互感器的误差成倍的增大,影响保护的正确动作。
半球谐振陀螺谐振子误差分析与性能评估半球谐振陀螺谐振子误差分析与性能评估引言:陀螺是一种利用陀螺效应来测量方向、稳定运动或者导航的装置,具有广泛的应用领域,例如导航系统、惯性导航等。
作为陀螺的一种改进型,半球谐振陀螺谐振子在较大转速范围内具有更好的误差性能和较高的精度。
1. 谐振原理及结构半球谐振陀螺谐振子是一种基于谐振原理工作的陀螺仪器。
其结构由一个半球形的壳体和一根悬挂在其中的陀螺转子组成。
当谐振子转子受到外界扰动时,谐振子壳体会根据陀螺效应的作用力引导转子在壳体内保持自由旋转。
通过测量转子的旋转状态变化,可以获知外界扰动信息。
2. 误差源分析在实际应用中,半球谐振陀螺谐振子的运动状态往往受到各种误差的影响,包括器件误差、环境误差等。
对这些误差源进行分析是评估其性能的关键。
2.1 器件误差器件误差是指因制造、安装或使用不当等原因导致的陀螺谐振子的运动状态发生偏差的误差。
例如,由于壳体和转子之间的制造偏差或者装配误差,使得谐振子在工作过程中受到非均匀的摩擦力。
此外,传感器的灵敏度固有偏差和跨度非线性等也会对谐振子的准确度产生影响。
2.2 环境误差环境误差是指由于谐振子所处环境的因素导致其运动状态发生偏差的误差。
例如,温度变化会引起壳体和转子材料的热膨胀,从而影响谐振子壳体和转子的相对位置。
此外,谐振子受到的振动、加速度等外部扰动也会对其运动状态产生干扰。
3. 误差影响分析分析误差源对半球谐振陀螺谐振子的性能影响可以帮助我们更好地了解其在不同应用场景下的适用性。
3.1 器件误差对性能影响器件误差的存在会导致谐振子输出信号与实际扰动信号之间存在偏差,降低了测量的准确性。
例如,传感器的固有偏差会导致输出信号始终存在一个常量的偏移,而传感器的非线性特性则会导致输出信号的非线性变化,影响对扰动信号的精确度测量。
3.2 环境误差对性能影响环境误差会直接影响谐振子的运动状态,进而影响对外部扰动信号的测量。
例如,温度变化引起的热膨胀会改变谐振子壳体和转子之间的相对位置,从而导致输出信号偏移。

第4卷第6期信息与电子工程 Vo1.4,No.6,2006 2006年12月 INFORMATION AND ELECTRONIC ENGINEERING Dec.文章编号:1672-2892 (2006)06-0431-05李平,赵志辉,张振仁采样时钟偏差对OFDM系统性能的影响(第二炮兵工程学院,陕西西安710025)摘要:针对采样时钟同步偏差对正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)系统的影响,建立了数学模型,分别就采样定时偏差和采样频率偏差的影响进行详细分析;经过仿真,从星座图、误码率(Bit-Error-Rate,BER)及信噪比(Signal-to-Noise Ratio,SNR)损失等角度对采样频率偏差的影响做了揭示和验证。
结果表明,采样频率偏差会引起信号幅度衰减和子载波间干扰(Inter-Carrier Interference,ICI),导致系统信噪比性能下降;这种影响与子载波位置有关,还会随着OFDM符号数的增多而加剧。
关键词:采样频率偏差;采样定时偏差;载波间干扰;OFDM中图分类号:TN911.72 文献标识码:AEffect of Sampling Clock Offsets on the Performance of OFDM SystemLI Ping,ZHAO Zhi-hui,ZHANG Zhen-ren(The Second Artillery Engineering Institute,Xi' an Shaanxi 710025,China) Abstract:This paper presents the effect of sampling clock offsets on the performance of OFDM system. Thesample timing error and sampling frequency offset are analyzed respectively in detail by the digital model. Inthe simulation, constellation, Bit-Error-Rate (BER) and Signal-to-Noise Ratio (SNR) performance degradationare analyzed taking into account the effect of sampling frequency offset. It is shown that sampling frequencyoffset can lead to amplitude attenuation and Inter-Carrier Interference (ICI) due to the loss of orthogonalitybetween the subcarriers. The SNR performance degrades with the increment of subcarriers indices and thenumber of OFDM symbols.Key words:sampling frequency offset;sample timing error;Inter-Carrier Interference (ICI);OFDM1 引言同步处理技术在通信系统中占据非常重要的地位,是信息可靠传输的前提。
摘 要:针对微波组件的关键误差源——金丝键合偏差进行研究,通过实验和仿真的方法,确定其对微波组件电性能的影响。
结果表明,金丝的键合距离与拱高的增加都会导致传输损耗的增加,驻波比增大,S21减小。
关键词:微波组件;金丝键合;电性能;有限元仿真中图分类号:TN405 文献标识码:A 文章编号:1001-3474(2020)04-0196-04Abstract: The key error source of microwave components, gold wire pressure bonding deviation, is studied, and its infl uence on the electrical properties of microwave components is determined through the methods of experiment and simulation. The results show that the increase of bonding distance and arch height of gold wire will lead to the increase of transmission loss, the increase of standing wave ratio and the decrease of S 21.Key Words: microwave component; Au wire bonding; electrical property; fi nite element simulation Document Code: A Article ID: 1001-3474 (2020) 04-0196-04金丝键合偏差对微波组件电性能的影响Influence of Gold Wire Press Bonding Deviation on Electrical Properties ofMicrowave Components张阳阳,胡子翔,王梅ZHANG Yangyang, HU Zixiang, WANG Mei(中国电子科技集团公司第三十八研究所国家级工业设计中心,安徽 合肥 230088)( National Industrial Design Center, The 38th Research Institute of CETC, Hefei 230031, China )基金项目:基础科研资助项目(JCKY2016210B002)。
龙源期刊网 随机相位误差对相控阵天线的性能影响作者:熊哲刘正权来源:《现代电子技术》2013年第09期摘要:为了对随机相位误差对于相控阵天线波束指向精度和副瓣电平的影响进行分析,以一维均匀直线阵为模型,采用概率统计的手段对波束指向误差的数学期望、方差和峰值副瓣电平进行了推导,并对此结果进行了计算机仿真验证和比较。
仿真结果表明,理论公式推导得到的结论与仿真实验的各项结果吻合良好。
关键词:随机相位误差;相控阵天线;波束指向精度;副瓣电平中图分类号: TN821⁃34 文献标识码: A 文章编号: 1004⁃373X(2013)09⁃0061⁃030 引言相控阵天线是21世纪60年代开始发展起来的一种新型电扫描天线,它通过控制各天线单元通道中的衰减器和移相器来改变天线馈电的幅度和相位,达到波束扫描的目的,具有波束指向和形状变化迅速,定向增益高等优点,且可以利用同一个天线孔径形成多个波束,实现多波束同时在空间的扫描。
然而在实际应用中,由馈电网络误差、制造公差、装配误差等因素造成的随机相位误差会对天线波束的性能造成不良的影响,比如使副瓣电平比理论设计值有所抬高,实际的波束指向偏离预期指向等等,最终导致整个系统的性能指标恶化。
鉴于此,对随机相位误差的影响进行理论分析,得出一些有益的结论,对于工程实践而言是大有裨益的。
本文以一维均匀直线阵为模型,运用概率统计的方法分析了随机相位误差对波束指向与副瓣电平的影响情况,希望能为工程实践提供一些参考。
1 随机相位误差对波束指向的影响当移项器本身的移相特性不理想、存在单元随机相位误差或是阵元失效等因素的影响时,相位误差可以看作是一个随机变量,满足一定的概率分布,因而每次随机实验得到的波束指向也是不同的。
下面具体分析相位误差对于波束指向的影响。
天线实验报告误差分析一、引言天线是无线通信系统中非常重要的组成部分,其性能直接影响到通信质量。
在天线设计和测试过程中,误差是无法避免的。
本文将对天线实验报告中的误差进行分析,并探讨其对天线性能的影响。
二、误差来源及分类在天线实验中,误差可以来源于多个方面,主要包括以下几个方面:1. 天线制造误差天线的制造过程中存在一定的误差,如天线的制造材料、加工工艺等都会对天线性能产生影响。
这类误差通常表现为天线的频率响应不符合理论值,天线增益不稳定等。
2. 环境误差天线实验通常在室外进行,而室外环境是非常复杂和多变的。
大气条件、地物遮挡等因素都会对天线的测试结果产生影响。
这类误差通常表现为天线增益与距离的关系不符合理论预期,信号传输的可靠性下降等。
3. 测量误差天线测试是一个精密的过程,通常需要使用专业的测试设备进行测量。
测量设备的精度、稳定性等都会对测量结果产生误差。
同时,测量过程中也存在人为误差,如操作不规范、测量方式选择不当等。
三、误差分析及影响误差的存在会直接影响到天线的性能和功能。
下面将针对不同的误差来源进行分析:1. 天线制造误差天线制造误差是由于制造过程中的不完美造成的。
例如天线的外形尺寸、材料参数等与设计要求的差异都会使得天线的实际性能与理论值产生误差。
这会导致天线的频率响应不合理,增益不稳定等问题。
对于需要高精度的天线应用,天线制造误差可能导致性能无法达到要求,需要进行更加精确的制造工艺。
2. 环境误差环境误差是由于实验环境的不完善造成的。
例如天线测试时的大气条件、地物遮挡等因素都会对测量结果产生影响。
这会导致天线增益与距离关系不合理,信号传输的可靠性下降等问题。
在实际应用中,我们需要对环境误差进行适当的修正和补偿,以尽可能减小其对天线性能的影响。
3. 测量误差测量误差是由于测量设备和操作过程中的不完美造成的。
例如测量设备的精度、稳定性等都会对测量结果产生误差。
同时,操作者的不规范操作也会导致测量误差,比如测量位置选择不当、测量参数设置错误等。
齿轮周节邻接误差一、概述齿轮是机械传动系统中重要的组成部分,其作用是将原动机的转速和转矩传递到负载上。
而齿轮的工作性能受到周节邻接误差的影响。
本文将深入探讨齿轮周节邻接误差的概念、原因、对齿轮系统性能的影响以及相应的改进方法。
二、齿轮周节邻接误差的定义齿轮周节邻接误差是指齿轮在啮合过程中的轴向相对运动造成的位置误差。
该误差主要包括齿距误差、齿位误差和齿向误差。
2.1 齿距误差齿距误差是指啮合齿轮之间的齿距与理论齿距之间的偏差。
齿轮齿距误差会导致齿轮传动系统产生周期性的冲击力和振动,从而增加噪声和磨损。
2.2 齿位误差齿位误差是指齿轮齿槽与其理论位置之间的偏差。
齿位误差会导致齿轮在啮合过程中出现偏压现象,使得齿轮传动系统的运动平稳性下降。
2.3 齿向误差齿向误差是指齿轮轴向方向上的位置误差。
该误差主要由齿轮制造过程中的加工误差、装配误差和变形引起,会导致齿轮传动系统产生振动、噪声和能量损失。
三、齿轮周节邻接误差的原因齿轮周节邻接误差的产生主要与以下几个因素密切相关:3.1 制造误差齿轮制造过程中存在加工误差和装配误差,如齿轮齿距、齿位和齿向的加工精度不高、尺寸偏差和形状偏差等。
制造误差会直接影响到齿轮周节邻接误差的产生。
3.2 变形引起误差齿轮传动系统在工作过程中会受到载荷和温度等因素的影响而发生变形,如齿轮轴向伸长、齿轮齿延展等。
这些变形会导致齿轮周节邻接误差的增加。
3.3 齿轮磨损齿轮在长时间运行过程中会发生磨损,导致齿轮齿距、齿位和齿向的偏差增加,进而引起齿轮周节邻接误差的产生。
四、齿轮周节邻接误差对齿轮系统性能的影响齿轮周节邻接误差对齿轮系统的性能有以下几个方面的影响:4.1 噪声和振动增加齿轮周节邻接误差会导致齿轮传动系统产生周期性的冲击力和振动,增加了噪声和振动,影响了齿轮系统的工作环境和运动平稳性。
4.2 能量损失和效率降低齿轮周节邻接误差会引起齿轮传动系统产生额外的能量损失,使得传动效率降低。
第47卷第5期 2007年1O月 Vo1.47 No.5
Oct.20o7
文章编号:1001—893X(2007)05-0177—03
重量误差对隔振系统性能的影响 朱健勇 (中国西南电子技术研究所,成都610036) 摘要:从如何确定航空电子设备配重模型件重量精度指标的角度,分析了重量误差对隔振系统性 能的影响,提出了解决问题的观点和方法。 关键词:航空电子设备;配重模型;隔振系统;重量误差 中图分类号:V241 文献标识码:A
Effects of the Counterbalance Model S Weight Error on Performances of Shock Absorption System
ZHU Jian—yong (Southwest China Institute of Electronic Technology,Chengdu 610036,China) Abstract:Some opinions and methods are presented from the aspect of how to determine the weight preci— sion of counterbalance model in avionics,and the effect of weight error on shock absorption system perform— ance is analysed. Key words:avionics equipment;counterbalance model;shock absorption system;weight error
航空电子设备不可避免地要面对耐久振动问 题。其中,先期考核结构件时,必然要用到电子设备 的配重模型件。无论配重模型件的具体结构形式如 何,其重量误差都是不可回避的问题。本文讨论重 量误差对隔振系统性能的影响,前提是配重模型件 的重心位置与实际电子设备的重心位置重合,且与 安装架隔振系统的几何中心重合。 1 问题的提出 例1:在项目1中,配重模型件重量为9 kg,而 电子设备实际的重量为9.8 kg,那么,在同一个安装 架隔振系统上,其隔振性能将产生如何变化?变化 量值是多少? 例2:在项目2中,集中安装架上的电子设备需 要分承制方研制,那么,对分承制方研制的电子设 备,其重量误差指标应不应该提?如果要提,提多少 比较合适? 例3:如果分承制方上报的重量指标与提交的 电子设备实际重量有较大误差时,对你所设计的安 装架隔振系统性能影响有多大?需不需要分承制方 整改?如果与技术合作方产生分歧该如何处理? 综上所述,上述问题的核心就是要了解重量误 差对安装架隔振系统性能的影响。
C64型敞车Dg32法兰接头尺寸和组焊偏差对密封性能的影响]~-22-.解,鸿我《29只寸组挥C64型敞车Dg32法兰接头尺寸和组焊偏差对密封性能的影响车辆验收室姜树武’-●__-‘-一272,206,C64型敞车风衬动主管组成.采用Dg32焊接法兰接头.组装后在法兰螺栓完全紧固的情况下.经风试验时前出现潺泄现象.为了处理漏泄.操作者用乙炔火焰烘烤法兰接头两侧的主管.待主管烤红后.再进一步紧固法兰螺栓.如果还漏泄,就得调换主管或法兰体.也有个别操怍者违章增加密封垫圈.这样虽然能解决当时的漏泄问题,但是给运用带来了潜在的危险.现通过分析Dg32法兰接头尺寸和组焊偏差对密封性能的影响来探讨解决问蹈的方法.一,睦兰接头密封垫圈的压缩量Dg32法兰接头是由4个法兰体,两个接头体(一个嵌有密封垫圈,另一个是平头体)和一个密封垫圈组成,如图1.{llIflI-4ll西,1,接头体1;2密封垫圈;3接头体2;4法兰体.两接头悼分别焊接在对的两艰主蕾上靠紧固法兰体上的螺性,由法兰体带动接头体.对密封垫圈产生一定的压缩量来实现密封?为了保证密封性能?又不陵密封垫圈压缩过量.垫圈的压缩量就应加以控籼,其窑这一控耕是靠接头体上凸台的尺寸与公差”0~n05—5.?)的尺寸米限制的,如圈2;图为了保证密封垫圈的压缩量,实现密封,两对法兰体问必须留商一定间隙.以便在紧固螺栓时有压缩的量.防止密封垫罔投有压缩或压缩量不够而法兰体就已剐性接触.根据图2;图3;囝4计算法兰体问的间隙范茸(不计平面度影响X2-0?81----1.8mm+0.1(5+6.5=0.24-10之一\~一图4法兰体..5)一l.从以上计算数据可以看出.两对法兰体的间隙小于密封垫圈设计的压缩量.由此可以确定.密封垫圈的压缩量不是靠接头体控而是被莹兰体限定住了.如果是在极限情况下.间隙只有81ram.这洋就会使密封垫圈的压缩量(1.3—1.85mm)不能充分发挥作用.如果加上法兰体祷造累计误差(4个法兰体,6个接触面)和焊接组装的偏斜就更难保证垫圈的压缩量.三,接头体焊接所产生的偏斜Dg32接头体在组装前.需先将接头体焊接在主管上.由于主管外径盲制造偏差.尺寸为42.34-0.5.与主管连接的接头体尺寸也育制造偏差.图2;图3.尺寸为42.8:两件组装在一起就存在一定的间隙.其值为.一 1.34ram.按名义尺寸计算闫隙为0+5ram,因此经焊接就要产生一定的偏斜(既使有专用工装夹具也很难保证绝对垂直).按名义尺寸计算两接触面产生偏斜的斜率是:16:0.5.如果按此斜率计算法兰体接触面两螺栓间的偏斜量为O一一5.8ram(两面累计).图5;由于法兰怍设计的最小间隙是0.8lmm.而焊接所产生的偏斜远大于设计的最小间隙?困此产生的偏斜量就吃掉了设计的最,『,间隙.使法兰体的一侧刚性接触.当紧固这~侧螺性时悔不产生_土缩(略去金属弹性变形因素).只有靠紧固另一侧螺栓.如果产生的偏斜较大.就台使密封垫圈压不紧或压缩量不够.造成漏泄.影啊了密封效果四,调整接头体足寸.提高密封效果为了’提高法兰接头的密封效果.一方面要提高法兰体的游造质量.控制焊接,压管i装的偏斜量男一方面应适当增加两对法兰体间的压缩间隙.保证密封垫圈有足够的压缩量.既使在焊接与组装产生一定偏斜的情况下,也能保证垫圈压紧.不漏泄.齐厂为提高接头的密封效n—n1果一改进丁600台份的接头体.籽原接头体10:和5l=.’尺寸.图,.囝3:分别增加了-l一U.UU毫米.这样相当于将两法兰体间隙增加到28I一一3.8ram.如图l改进前.如果法兰接头焊接或线装偏斜大于0.81ram.就会出现固垫圈压缩量不足而产生漏泄的现象.改进后,法兰接头如果偏斜不大于2ram,就能保证密封垫圈有一定的压缩量.因此艇密封更加可靠,通过改进后的应用.基本杜绝了烤管紧固螺栓千口漏泄现象.提高了法兰接头的密封效果.1993年8月I5日。
误差对系统性能的影响 本文介绍了如何根据系统需求合理选择ADC,列举了ADC测量中可能遇到的各种误差源。
采用12位分辨率的模数转换器(ADC)未必意味着你的系统将具有12位的精度。很多时候,令工程师们吃惊和不解的是:数据采集系统所表现出的性能往往远低于期望值。如果这个问题直到样机运行时才被发现,只好慌慌张张地改用更高性能的ADC,大量的时间被花费在重新更改设计上,同时,试投产的日程在迅速临近。问题出在哪里? 最初的分析中有那些因素发生了改变? 对于ADC的性能指标有一个深入的了解,将有助于发现一些经常导致性能指标不尽人意的细节所在。对于ADC指标的理解还有助于为你的设计选择正确的ADC。
我们从建立整个系统的性能需求入手,系统中的每个元器件都有相应的误差,我们的目标是将整体误差限定在一定的范围内。ADC是信号通道的关键部件,必须谨慎选择适当的器件。在我们开始评估整体性能之前,假设ADC的转换效率、接口、供电电源、功耗、输入范围以及通道数均满足系统要求。ADC的精度与几项关键规格有关,其中包括:积分非线性(INL)、失调和增益误差、电压基准的精度、温度效应、交流特性等。最好从直流特性入手评估ADC的性能,因为ADC的交流参数测试存在多种非标准方法,基于直流特性比较容易对两个IC进行比较。直流特性通常比交流特性更能反映器件的问题。
系统要求 确定系统整体误差的常见方法有两种:均方根和(RSS)、最差工作条件下的测试。采用RSS时,对每项误差取平均,然后求和并计算开方值。RSS误差由下式计算:
其中EN代表某个特定电路元件或参数的误差项。当所有误差不相干时这种方法最准确(实际情况可能如此,也可能不同)。利用最差条件分析法,所有误差项相加。这种方法能够确保误差植不会超出规定范围,它给出了最差条件下的误差限制,实际误差始终小于该值(通常会低出若干倍)。
多数情况下,测量误差介于两种方法测试数值之间,更接近于RSS法提供的数值。可以根据误差预算选择使用典型误差和最差工作条件下的误差。具体选择时取决于许多因素,包括:测量值的标准方差、特定参数的重要性、误差之间的相互影响程度等。由此可见,很难找到简捷的、必需遵循的规则。在我们的分析中,我们选择最差条件测试法。 在本例中,假定我们需要0.1%或者说10位的精度(1/210),这样,只有选择一个具有更高分辨率的转换器才有意义。如果是一个12位的转换器,我们可能会想当然地以为精度已足够高;但是在没有仔细检查其规格书之前,我们并没有把握得到12位的性能(实际情况可能更好或更糟)。举例来说,一个具有4LSB积分非线性误差的12位ADC,最多只能提供10位的精度(假设失调和增益误差已得到修正)。一个具有0.5LSB INL的器件则可提供0.0122%的误差或13位的精度(消除了增益及失调误差以后)。要计算最佳精度,可用最大INL误差除以2N,其中N是转换器位数。在我们的举例中,若采用0.075%误差(或11位)的ADC,则留给其余电路的误差余量只有0.025%,这其中包括传感器、前端信号调理电路(运放、多路复用器等等),或许还有数模转换器(DAC)、PWM信号或信号通路上的其它模拟电路。
我们假设整体系统的总计误差预算基于信号通道各个电路元件的误差项目总和,另外我们还假设,将要测量的是一个缓慢变化的直流、双极性输入信号,具有1kHz的带宽,工作温度范围为0°C到70°C,并在0°C至50°C范围内保证性能。
直流性能 微分非线性 虽说不被作为一项关键性的ADC参数,微分非线性(DNL)误差还是进入我们视野的第一项指标。DNL揭示了一个输出码与其相邻码之间的间隔。这个间隔通过测量输入电压的幅度变化,然后转换为以LSB为单位后得到(图1)。值得注意的是INL是DNL的积分,这就是为什么DNL没有被我们看作关键参数的原因所在。一个性能优良的ADC常常声称“无丢码”。这就是说当输入电压扫过输入范围时,所有输出码组合都会依次出现在转换器输出端。当DNL误差小于±1LSB时就能够保证没有丢码(图1a)。图1b、图1c和图1d分别显示了三种DNL误差值。DNL为-0.5LSB时(图1b),器件保证没有丢码。若该误差值等于-1LSB (图1c),器件就不能保证没有丢码,值得注意的是10码丢失。然而,当最大DNL误差值为±1时,大多数ADC都会特别声明是否有丢码。由于制造时的测试界限实际上要比规格书中所规定的更为严格,因此这种情况下通常都能够保证没有丢码。对于一个大于-1LSB (图1d中为-1.5LSB)的DNL,器件就会有丢码。 3 / 14
图1a. DNL误差:没有丢码。 图1b. DNL误差:没有丢码。 图1c. DNL误差:丢失10码。 4 / 14
图1d. DNL误差:AIN*数字输入是三种可能数值之一,扫描到输入电压时,10码将会丢失。
随着DNL误差值的偏移(也就是说-1LSB,+2LSB),ADC转换函数会发生变化。偏移了的DNL值理论上仍然可以没有丢码。关键是要以-1LSB作为底限。值得注意的是DNL在一个方向上进行测量,通常是沿着转换函数向上走。将造成码[N]跳变所需的输入电压值和码[N+1]时相比较。如果相差为1LSB,DNL误差就为零。如果大于1LSB,则DNL误差为正值;如果小于1LSB,DNL误差则为负值。
有丢码并非一定是坏事。如果你只需要13位分辨率,同时你有两种选择,一个是DNL指标≤ ±4LSB的16位ADC (相当于无丢码的14位),价格为5美元,另一个是DNL ≤ ±1LSB的16位ADC,价格为15美元,这时候,购买一个低等级的ADC将大幅度地节省你的元件成本,同时又满足了你的系统要求。
积分非线性 积分非线性(INL)定义为DNL误差的积分,因此较好的INL指标意味着较好的DNL。INL误差告诉设计者转换器测量结果距离理想转换函数值有多远。继续我们的举例,对于一个12位系统来讲,±2LSB的INL误差相当于2/4096或0.05%的最大非线性误差(这已占去ADC误差预算的2/3)。因此,有必要选用一个1LSB (或更好)的器件。对于±1LSB的INL误差,等效精度为0.0244%,占ADC误差预算的32.5%。对于0.5LSB的指标,精度为0.012%,仅占ADC误差预算的16% (0.0125%/0.075%)。需要注意的是,无论是INL或DNL带来的误差,都不太容易校准或修正。
失调和增益误差 失调和增益误差很容易利用微控制器(μC)或数字信号处理器(DSP)修正过来。就失调误差来讲,如果转换器允许双极性输入信号的话,操作将非常简单。对于双极性系统,失调误差只是平移了转换函数,但没有减少可用编码的数量(图2)。有两套方法可以使双极性误差归零。其一,你可以将转换函数的x或y轴平移,使负满度点与单极性系统的零点相对准(图3a)。利用这种方法,可以简单地消除失调误差,然后,通过围绕“新”零点旋转转换函数可以对增益误差进行调节。第二种技术采用了一种迭代法。首先给ADC输入施加一个0V电压并执行一次转换;转换结果反映了双极性零点失调误差。然后,通过围绕负满度点旋转转换曲线实现增益调节(图3b)。注意此时转换函数已绕A点转过一定角度,使零点偏离了期望的转换函数。因此还需要进一步的失调误差校正。
图2. 双极性系统的失调误差 图3a和3b. 校正双极性失调误差(注意:阶梯状转换函数已被一条直线取代,因为该图中包含所有码,而台阶已经小得无法分辨,看上去成为一条直线)。 6 / 14
图3a和3b. 校正双极性失调误差(注意:阶梯状转换函数已被一条直线取代,因为该图中包含所有码,而台阶已经小得无法分辨,看上去成为一条直线)。 图3a和3b. 校正双极性失调误差(注意:阶梯状转换函数已被一条直线取代,因为该图中包含所有码,而台阶已经小得无法分辨,看上去成为一条直线)。
单极性系统还要复杂一些。如果失调为正值,可采用和双极性系统相似的处理方法。不同之处在于你将失去一部分ADC量程(见图4)。如果失调为负值,你将无法简单地通过一次转换测得失调误差。因为在零点以下,转换器只能显示出零。这样,对于一个负失调误差的转换器,你必须缓慢地增加输入电压,以确定在什么地方ADC结果出现首次跳变。同样,你将失去一部分ADC量程。
图4. 单极性系统中的失调误差 回到我们的举例,两种情况中的失调误差可按下述方法获得: 2.5V基准时+8mV的失调误差相当于12位ADC具有13LSB的误差(8mV/[2.5V/4096])。虽然分辨率仍是12位,但是你必须从每次转换结果中扣除13个码以补偿失调误差。值得注意的是,实际上这时的可测量满量程值就变为了2.5V(4083/4096) = 2.492V。此范围以上的任何值都会使ADC溢出。因此,ADC的动态范围或者说输入范围减小了。这个问题在较高分辨率的ADC中尤为显著;在16位系统中,8mV对应于210LSB (VREF = 2.5V)。
如果失调为-8mV (假设为单极性输入),接近于零的小信号输入将不会引起任何输出变化,一直到模拟输入增加到+8mV 。这同样造成了ADC动态范围的减小。 增益误差定义为满量程误差减去失调误差(图5)。满量程误差在转换函数曲线上最后一次ADC跳变处进行测量,并和理想ADC的转换函数相比较。增益误差可通过软件用一个简单的线性函数y = (m1/m2)(x)进行简单的校正,其中的m1是理想转换函数的斜率,m2是实际测得的转换函数的斜率(图5)。
图5. 失调、增益和满量程误差 增益误差指标中可能包含或不含ADC参考电压对于误差的贡献。在电气规范中,检查一下增益误差的测试条件,并决定采用内部或外部基准工作是非常重要的。一般情况下,当采用片内基准时增益误差会比较大。如果增益误差为零,在对满量程模拟输入作转换时转换结果应为全1 (对于本例的12位系统则为3FFh) (见图6) 。由于我们的转换器不理想,全1转换结果可能会在施加的输入电压大于满量程(负增益误差)或小于满量程(正增益误差)时出现。有两种办法可以调整增益误差,其一是调节参考电压,以便在某特定参考电压下得到满量程输出,或者在软件中采用一个线性校正曲线改变ADC转换函数的斜率(一阶线性方程或查表法)。