短距离高精度无线定位方法的研究及实现
- 格式:pdf
- 大小:372.00 KB
- 文档页数:9
一、GPS/北斗系统及其定位原理GPS/全球定位系统(英语:Global Positioning System,通常简称GPS),又称全球卫星定位系统,是一个中距离圆型轨道卫星导航系统。
它可以为地球表面绝大部分地区(98%)提供准确的定位、测速和高精度的时间标准。
系统由美国国防部研制和维护,可满足位于全球任何地方或近地空间的军事用户连续精确的确定三维位置、三维运动和时间的需要。
该系统包括太空中的24颗GPS卫星;地面上1个主控站、3个数据注入站和5个监测站及作为用户端的GPS接收机。
最少只需其中3颗卫星,就能迅速确定用户端在地球上所处的位置及海拔高度;所能收联接到的卫星数越多,解码出来的位置就越精确。
该系统由美国政府于1970年代开始进行研制并于1994年全面建成。
使用者只需拥有GPS接收机即可使用该服务,无需另外付费。
GPS信号分为民用的标准定位服务(SPS,Standard Positioning Service)和军规的精确定位服务(PPS,Precise Positioning Service)两类。
由于SPS无须任何授权即可任意使用,原本美国因为担心敌对国家或组织会利用SPS对美国发动攻击,故在民用讯号中人为地加入选择性误差(即SA政策,Selective Availability)以降低其精确度,使其最终定位精确度大概在100米左右;军规的精度在十米以下。
2000年以后,克林顿政府决定取消对民用讯号的干扰。
因此,现在民用GPS也可以达到十米左右的定位精度。
GPS系统拥有如下多种优点:使用低频讯号,纵使天候不佳仍能保持相当的讯号穿透性;全球覆盖(高达98%);三维定速定时高精度;快速、省时、高效率;应用广泛、多功能;可移动定位;不同于双星定位系统,使用过程中接收机不需要发出任何信号增加了隐蔽性,提高了其军事应用效能。
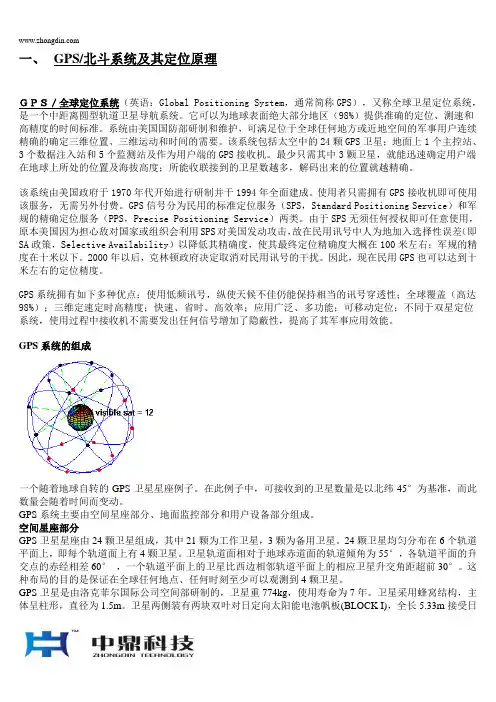
GPS系统的组成一个随着地球自转的GPS卫星星座例子。
在此例子中,可接收到的卫星数量是以北纬45°为基准,而此数量会随着时间而变动。
基于UWB精确定位智能搜救仪设计目录一、内容概述 (2)1.1 背景介绍 (2)1.2 UWB技术概述 (3)1.3 智能搜救仪的重要性 (4)1.4 文献综述 (5)二、系统总体设计 (7)2.1 设计目标与要求 (8)2.2 系统架构 (9)2.3 硬件组成 (10)2.4 软件架构 (11)三、UWB定位技术 (13)3.1 UWB原理简介 (14)3.2 UWB定位算法 (15)3.3 定位精度分析 (16)3.4 实现方式探讨 (18)四、智能搜救仪硬件设计 (19)五、智能搜救仪软件设计 (21)5.1 数据采集与处理 (22)5.2 用户界面设计 (23)5.3 信号处理算法实现 (24)5.4 搜救决策与执行 (25)六、系统测试与评估 (26)6.1 测试环境搭建 (27)6.2 测试方法与步骤 (29)6.3 测试结果分析 (30)6.4 性能评估 (31)七、结论与展望 (32)7.1 结论总结 (33)7.2 研究不足与改进 (34)7.3 未来发展方向 (35)一、内容概述本文档旨在详细介绍基于UWB(超宽带)技术精确定位的智能搜救仪的设计。
UWB技术作为一种新兴的无线通信技术,具有短距离、高速率、低功耗和高安全性等特点,为智能搜救仪的精确定位提供了有力支持。
本文首先介绍了UWB技术的原理和发展现状,然后详细阐述了智能搜救仪的整体架构、关键技术和功能模块,最后对智能搜救仪的实际应用进行了展望。
通过本文档的阅读,读者可以全面了解基于UWB技术的智能搜救仪的设计思路、技术特点和实际应用价值。
1.1 背景介绍随着科技的飞速发展和人们对安全需求的日益增长,快速准确的定位技术以及智能化搜救设备已成为应急救援领域的重要组成部分。
在这样的背景下,基于超宽带(UWB)技术的精确定位智能搜救仪应运而生。
该设计结合了无线通信技术和高精度定位算法,为搜救工作带来了前所未有的便利和精准度。
UWB技术以其高精度定位的优势,在多个领域得到了广泛应用。

0 引言在日常生活中,以位置为基础的服务(Location-based services,LBS)已经和人类的生活息息相关。
可靠的LBS 服务离不开准确的位置信息。
当前,依赖全球卫星导航系统(global navigation satellite system, GNSS)的室外定位技术[1]已经趋于成熟,甚至在于特定需求下可以达到亚米级的精度。
但是看似相似的室内定位技术实际却是截然不同,室内定位技术受环境影响较大,室外环境下障碍物较少,一般情况下二维定位即可满足需求。
而室内环境复杂,各种家具、楼房等等都会对定位产生影响,并且室内定位的精度需求远远高于室外,往往需要“厘米级”精度[2]才能满足用户需求,因此利用GNSS 提供位置服务的方案不太合适。
根据数据统计,在实际生活中,人类在室内度过的时间平均可以达到70% - 90%,对于LBS 的需求更迫切,GNSS 服务无法满足用户需求的情况下,需求精准室内位置信息已经成为室内LBS 服务发展的红线。
同时,随着几种主流室内定位技术,包括有Wi-Fi、蓝牙、超宽带、蜂窝移动网络的发展,已经能更为精确地实现信号的传递与检测。
1 应用前景随着定位技术的发展,基于位置的服务越来越受到人们的关注。
目前,LBS 已经渗透到人们日常生活的方方面面,关于室内定位的需求价值早已远远超出早期学者的预期,精确、实时的位置信息打破了虚拟空间的数据信息与真实世界物理对象的壁垒,掀起零售、制造、物流、急救、大型公共场所导航等行业的革命,真正意义上推动万物互联的进程。
[3]在商场、停车场、机场、火车站、医院等大型公共场所中,LBS 是不可或缺的。
比如,在人们外出旅游时,LBS 可以给人们带来方便,便于人们查询景点、餐厅、酒店宾馆等信息;当发生事故时,LBS 可以更加准确地提供具体信息。
同时,在信息时代的背景下,随着人工智能、机器人技术的发展,一些新型行业的兴起,比如无人医疗护理、智能制造、智能物流等行业也更加需要LBS 提供技术支撑。
第21期2022年11月无线互联科技Wireless Internet TechnologyNo.21November,2022作者简介:赵紫稷(1989 ),男,黑龙江哈尔滨人,工程师,硕士;研究方向:雷达信号处理㊂无人机频谱远距离探测和高精度测向技术探索赵紫稷(中船重工第八研究院,江苏㊀南京㊀211106)摘㊀要:在深入分析无人机频谱远距离探测技术与高精度测向技术的过程中,相关人员要深入探讨无人机频谱远距离探测技术与高精度测向技术的相关原理,通过研究无人机频谱远距离探测和测向技术的具体应用范围,探索无人机探测技术的发展趋势㊂在此基础上,文章总结了频谱探测技术在无人机探测与反制探测领域的具体应用情况,为无人机的应用研发和创新提供参考㊂关键词:无人机频谱;远距离探测技术;高精度测向技术0㊀引言㊀㊀在科技水平不断提升的背景下,我国各领域的发展也越来越快㊂频谱探测技术是我国高新技术中的重要技术类型,尤其在无人机行业发展过程中,频谱探测技术的应用范围不断扩大㊂各种新进科学技术的发展可以推动无线电技术的发展,不同电子设施的应用范围也不断扩大,由此可以形成紧密的电磁网,为我国无人机频谱探测技术的发展提供了坚实基础㊂在实际研究中,相关人员只有全面掌握无人机频谱远距离探测和高精度测向技术的应用原理,拓展无人机频谱远距离探测技术与高精度测向技术的应用范围,明确在无人机探测技术应用过程中存在的问题,才能对技术进行深入研究,促进技术创新与发展㊂1㊀无人机频谱远距离探测技术存在的问题㊀㊀目前,电子频谱探测技术的应用受到世界各国的广泛关注,例如美国在研究过程中的典型系统包括民用航空无线电干扰监测系统IMDS,主要是对民航通信导航等占用频谱进行有效监测;狼群网络系统的主要功能是战场捕获敌方雷达和通信;GPS 导航干扰监测系统也属于无人频谱探测技术的典型应用[1]㊂此外,德国短波信号监测㊁韩国非法电磁信号监测网络㊁我国的频谱专项感知研究与验证等项目都是对频谱探测技术的研究与应用项目㊂近年来,我国低空空域被逐步开放,无人机技术产业以及应用发展速度越来越快,但是随之而来的低空安全隐患越来越突出㊂无人机探测以及反制技术成为当前的研究热点㊂近些年,我国低空空域被逐步开放,无人机技术产业以及应用发展速度越来越快,但是随之而来的低空安全隐患越来越突出㊂无人机探测以及反制技术成为当前的研究热点㊂因为无人机具有低慢小的特点,目标机动也比较复杂,速度比较慢,雷达反射截面积比较小,所以现有的雷达无法有效探测无人机远距离目标㊂频谱探测技术在使用过程中需要获取无人机的遥控和回传信息,从而对无人机进行监测㊁识别㊁定位㊁跟踪㊁干扰打击㊂作为性价比较高的手段,无人机的发展越来越受到关注㊂在无人机应用中可以对无人机信号进行远距离探测,但是因为接收灵敏度在同一中频宽带下的差别比较小,获取的信号准确度不高㊂因此,需要对弱信号检测技术进行优化,加强无人机频谱测探效果研究十分重要㊂频谱资源作为国家发展过程中的重要战略资源,在无线电技术快速发展㊁电子设备不断增加的情况下,其作用越来越突出㊂随着电子信号不断交织,相关人员对频谱资源进行应用时,可以共用无线通信信道,但是受自然电磁环境的影响,会形成复杂快变的电磁空间,导致探测效果不佳㊂此外,因为无人机目标机动也比较复杂,速度比较慢,雷达反射截面积比较小,现有的雷达无法有效探测无人机远距离目标㊂在获取无人机远距离目标信号时,在同一中频宽带下的信号差别比较小,直接影响了信号获取的准确度㊂因此,为了提升无人机频谱测探效果,尤其是提升远距离探测结果的准确性,相关人员需要研究频谱设备的天线增益,利用定向喇叭天线完成空域探索任务㊂此外,相关人员还需要利用全空域监测阵列,采用幅度关系完成目标信号方位计算工作,提高测向精度㊂2㊀对无人机频谱远距离探测技术与高精度测向技术的应用2.1㊀改进频谱设备,提升远距离探测的可靠性2.1.1㊀全向天线增益设计㊀㊀当前,大多数频谱设备主要利用全向天线完成信号探测,但是全向天线的增益存在一定限制,无法有效优化增益,大多保持在2dBi 左右,探测距离为2km 左右㊂为了解决天线增益限制问题,在无人机研发过程中,一些企业对无人机频谱侦测设备进行设计增益,使其增益达到12dBi,定向喇叭天线也可以完成空域探索任务㊂在信号幅度相同的情况下,探测距离与全向探测能够提高3倍左右㊂对全向双锥无源天线的增益情况进行研究,可以确定其在6GHz 以下,频段天线增益维持在2dBi 左右㊂在定向监测的增益测试中,2~6GHz 频段增益保持在11~12dBi㊂由此可以确定,喇叭天线增益比全向监测天线增益高9.5dBi 左右[2]㊂无线信号空间衰减模型:Ls (dB)=32.4+20Lgf(MHz)+20LgD(km)㊂以此为基础进行计算,假设作用的距离增加n倍时,9.5=20lg n,反对数n=3,代表增益高9.5dBi的喇叭侦测天线作用距离比全向双追侦测天线作用距离高3倍㊂设备预计侦测距离为10km,在实际研究中需要通过图传信号进行分析,利用全向天线进行发射并经过空间传播到接收天线,接收天线后即为侧向开关矩阵,可以对信号进行放大和选择输出,最后通过射频电缆发送到车上接收机㊂2.1.2㊀侦测设备灵敏度优化㊀㊀在测试LK-WDF001侦测设备灵敏度的过程中,相关人员发现,6GHz频段的灵敏度可以达到-100dbm,这代表信号满足最低灵敏度要求,意味着探测系统在估计自动探测和识别方面存在一定难度,探测精度受到影响㊂因此,需要将天线接收信号与低噪放电路连接,低噪放设计增益为11dB,开关矩阵噪声系数为5,系统灵敏度能够提高6dB,有利于开展信号自动探索以及信号识别工作,提升无人机频谱远距离探测结果的可靠性㊂2.2㊀高精度测向技术优化设计2.2.1㊀计算目标信号方位㊀㊀无人机探测设备主要应用于5GHz以上频段,在这一频段使用相位法测量无法获取理想的测向效果㊂在这种情况下,LK WDF001设备需要利用全空域监测阵列,采用幅度关系完成目标信号方位计算工作㊂其中,1号对周与1号喇叭可以通过2选1开关进行选通,然后通过低噪放电路进行输出,其他7组天线以同样的方法输出㊂输出的8组信号完成两个5选1开关输出两路信号后,可以将其输入测向接收机㊂两层天线列阵在空间上需要错开布置,以上下方式安装,喇叭测向阵列为下层,对周测向阵列在下层㊂天线内部安装结构以8个喇叭天线合成的阵列天线为主㊂2.2.2㊀分析数据对应方向㊀㊀分析合成方向,如果目标信号从某一个方向进入天线阵列,每一个喇叭接收的幅度值会存在明显差异,并且信号入射的方位与幅度分布具有唯一映射关系㊂通过唯一映射关系研究可以掌握信号幅度的分布关系,获取信号入射范围㊂一般情况下,幅度相关工程实现方法主要是通过电子开关选通1号到8号天线,对目标频点信号带内平均功率进行有效采集,获取天线接收的平均功率值㊂将获取的数据和样板库内相同频点数据进行对比,获取相关系数㊂数据相关系数最大时,说明数据对应方向值为来波方向值㊂2.2.3㊀计算天线幅度系数㊀㊀在工程应用中发现,高增益定向天线构建的测向阵列受天线源强烈的方向特性影响,在远距离目标信号采集过程中,很多天线源无法有效接收信号㊂受这种情况影响,需要引入8个天线幅度完成相关系数计算,导致测向结果的准确度受到影响㊂因此,相关人员需要开发相邻幅度法测向算法,可以将数据筛选和数据统计方法有效结合,提高无人机图传信号的精准性㊂同时,相关人员可以使用累计幅度统计方法,以低成本的硬件架构为基础,对遥控器的高速跳频信号进行测向㊂根据这一方法研发的无人机侦测设备外场实测探测距离能够达到8km以上,测向精度也可以达到3ʎ左右[3]㊂3 无人机频谱远距离探测与高精度测向技术的应用3.1㊀在重要区域防护中的应用㊀㊀无人机频谱远距离探测和测向技术的应用有助于完成重要区域防护工作,特别是对监狱㊁机场等重要区域进行防护时,利用集中式协作频谱探测技术构建TDOA无人机定位系统,可以对整个区域内400MHz至6GHz的无线电信号进行全面扫描㊁采集,并将信号存储在对应的系统内,根据数据使用需求完成测量分析,实时发现位置信号,之后通过频谱特征库匹配对无人机目标进行识别㊁定位和跟踪[4]㊂在重要区域防护过程中,需要加强传感器部署工作,要确保传感器位置和数量与地形条件相适应㊂传感器站点越多,定位精度越高,一般在重点防护区域需要部署4个传感器节点㊂在传感器节点布设过程中,最好按照正方形分布,每个传感器相距1~2km,位置标定为1m㊂无线传感器主要由宽带天线㊁配套线缆和信号接收器组成㊂在信号采集和预处理完成后,相关人员需要将采集的数据回传到融合中心㊂例如:无人机以直径300m㊁高度50m进行环绕飞行时,获取的无人机图传和控制信号强度为-80dbm~-90dbm,图传信号为宽带信号,控制信号为窄带慢速变频信号㊂在获取可疑信号时,系统可以直接切换到识别模式,如果识别为无人机信号会转为定位跟踪模式,并给出无人机定位的具体信息㊂利用周期性持续定位,相关人员可以获取无人机的飞行轨迹,通过频谱特征识别以及对比工作能够准确掌握无人机的型号㊂在基于3个节点的探测覆盖测试系统应用过程中,传感器需要设置在比较开阔的江面,两岸距离为1km,高度为15m,天线增益为2dBi㊂在对无人机信号进行检测时,灵敏度为3dB,无人机的高度固定在20m,系统对2.4 GHz附近的信号频谱进行监测㊂可以确定站与站之间的距离为1km时,距离不同站0.4km范围内的区域定位精度比较高,探测威力受天线高度㊁无人机飞行高度和大气衰减等不同因素的影响较大㊂在监测过程中,相关人员需要根据现场情况合理调整无人机频谱远距离探测与高精度测向方案,确保探测结果的可靠性㊂3.2㊀在探测与反制中的实践㊀㊀深入研究无人机的目标特性和频谱发射源定位技术有助于将其运用在探测和反制领域㊂无人机利用TDOA交叉定位方法能够制造出可以在不同环节与地点应用的探测仪㊂例如:多普勒测量仪㊁干涉仪测向机等,并使用交叉定位方式发挥测向仪的积极作用,实现完美的结合效果㊂TDOA本身的定位精度比较高,系统运行比较简单,出现的问题也比较少,将其应用在无人机系统内具有实用性和经济性,可以在大规模探测工作中应用㊂特别是在重点区域防护过程中,相关人员可以利用集中协作频谱探测技术构建无人机定位系统,掌握区域内的不同信号和消息,提升重点区域综合防护效果㊂此外,利用无人机技术进行定位可以分配无人机的位置和数量,最大限度地提高探测精度,保证定位效果㊂在无人机反制应用方面,系统一般由光电跟踪设备和无线电干扰器组成,锁定相应的目标后,可以及时完成定位,之后需要对无人机系统干扰㊂为了达到理想的效果,常用的干扰方式主要包括反制式干扰和欺骗式干扰㊂反制式干扰是对高频率信号进行干扰;欺骗式干扰主要是对无人机进行欺骗,方便对无人机进行捕捉㊂相关人员需要根据具体的情况合理选择干扰方式,获取更多的情报信息,保护无人机以及定位系统正常稳定运行㊂4㊀无人机频谱探测技术应用前景㊀㊀无人机频谱远距离探测和高精度测向技术发展过程,受卫星导航定位系统㊁数字通信系统等科学技术的影响较大㊂随着科学技术的不断发展,无人机逐渐从军用领域朝着民用领域普及㊂近年来,消费级无人机越来越多,无人机自主导航和监控技术的发展也越来越快㊂我国自主制造的北斗导航系统是无人机定位设备安全飞行的重要保障㊂RTK技术可以提高无人机的定位精准度㊂网络RTK可以解决单基准站和人工架设参考站存在的距离短和信号弱等问题㊂相关人员对无人机自主导航技术的深入研究推动了我国无人机技术的广泛应用,也丰富了无人机的功能㊂目前,国内惯导技术不断成熟,无线通信技术也在不断发展㊂远距离无人机测控技术也越来越成熟㊂在今后的研究过程中,相关人员需要根据社会发展对无人机的具体需求,提高无人机远距离探测水平,可以在电力监测㊁远海监测和桥梁监测中充分应用无人机探测技术,达到节省人力㊁物力,提高任务执行效率的目的[5]㊂此外,在森林灭火和高空灭火等援救过程中,无人机有助于提高火灾现场的探测效率,掌握火灾情况,对加快救援进程㊁缩短救援时间㊁挽救人们的生命和财产有积极作用㊂同时,相关人员还要从无人机飞行规范等角度出发,约束无人机的应用,防止非法使用无人机㊂5㊀结语㊀㊀在无人机技术不断发展的情况下,研究无人机远距离频谱探测技术与高精度测向技术㊁提高远距离探测技术和高精度测向技术的应用效果是推动无人机行业长远稳定发展的重要前提㊂在当前的无人机远距离探测技术和高精度测向技术研究过程中,研究人员需要综合分析相关理论,通过结构设计㊁模型搭建和数据仿真等不同方法深入掌握技术的发展趋势,为后续无人机反制技术的进一步发展奠定基础㊂[参考文献][1]荣思远.基于超分辨测向技术和方向交汇定位算法的无人机探测系统研究[J].空中交通,2017(4):33-38.[2]汤金.基于北斗的无人机高精度自主导航与监控技术研究[D].哈尔滨:哈尔滨工程大学,2019.[3]谭畅.无人机无源测向方法与实现技术研究[D].成都:电子科技大学,2019.[4]李光伟,费晓燕,刘彦明,等.频谱探测技术在无人机探测与反制领域的应用[J].警察技术,2019(3):5.[5]沈建潮,朱辉.基于无人机的无线电监测测向系统校准方法研究[J].中国无线电,2018(1):4.(编辑㊀王永超) Research on spectrum remote detection and high precisiondirection finding technology of UAVZhao Ziji(The Eighth Research Institute of China Shipbuilding Industry,Nanjing211106,China) Abstract:In the process of in-depth analysis of UAV spectrum remote detection technology and high precision direction finding technology,the relevant principles of UAV spectrum remote detection technology and high precision direction finding technology must be deeply discussed.In this research process,the specific application range of UAV spectrum remote detection and direction finding technology is mastered,and the development trend of UAV detection technology is preliminarily studied.On this basis,the application of spectrum detection technology in UAV detection and countermeasures is summarized.It provides some reference for UAV application research and development and innovation.Key words:UAV spectrum;remote detection technology;high precision direction finding technology。
5g定位技术原理
5G定位技术原理5G定位技术是建立在5G网络基础上的
一种定位技术,它可以实现精确的无线定位。
它是基于轨迹及其定位服务的一种技术,主要用于准确定位无线移动设备上的用户。
5G定位技术能够提供更高精度的定位服务,并可以在
多个模式下实现定位,其中包括基于无线网络的定位,基于GPS的定位,基于蓝牙的定位,以及基于机器研究的定位技
术等。
5G定位技术的实现需要满足一些基本要求,包括实现高
精度的定位、支持大规模的定位并可以支持多种无线定位模式。
5G定位技术可以利用5G系统的特性,如更大的带宽、更低
的延迟等来实现定位。
此外,它还可以利用多普勒效应和多普勒定位技术来实现定位。
多普勒定位技术是一种利用多普勒效应来实现高精度定位的技术,它可以利用发射机和接收机之间的多普勒效应来实现定位。
此外,5G定位技术还可以借助于GPS和无线网络来实现
定位。
例如,可以利用GPS定位,利用GPS卫星的信号可以
实现较为准确的定位,但受到天气和环境的影响程度较大。
另外,利用无线网络定位也可以实现定位,可以利用无线网络信号的信号强度和时间差等信息来实现定位。
5G定位技术也可以利用机器研究来实现定位,机器研究
技术可以用于分析和测量无线信号的强度和时间差,以及根据
用户的历史定位记录等数据来进行定位。
最后,5G定位技术也可以利用传感器和环境信息来实现定位,如利用气压、温度或湿度等信息来实现定位。
总之,5G定位技术是一种实现精确定位的技术,它可以借助于多种技术,如GPS、无线网络、多普勒定位技术和机器研究技术等,以及传感器和环境信息等,实现准确的定位服务。
空间目标探测与识别方法研究一、概述空间目标探测与识别作为航天领域的重要研究方向,旨在实现对地球轨道上各类空间目标的精确探测和有效识别。
随着航天技术的不断发展,空间目标数量日益增多,类型也日趋复杂,这给空间目标探测与识别带来了前所未有的挑战。
深入研究空间目标探测与识别方法,对于提升我国航天事业的国际竞争力、维护国家空间安全具有重要意义。
空间目标探测主要依赖于各类传感器和探测设备,如雷达、光电望远镜、红外传感器等。
这些设备能够捕获空间目标的信号或特征信息,为后续的目标识别提供数据支持。
由于空间环境的复杂性和目标特性的多样性,探测过程中往往伴随着大量的噪声和干扰,这要求我们必须采用先进的信号处理技术来提取有用的目标信息。
空间目标识别则是基于探测到的目标信息,利用模式识别、机器学习等方法对目标进行分类和识别。
识别的准确性直接影响到后续的空间态势感知、目标跟踪以及空间任务规划等工作的质量。
如何提高识别算法的准确性和鲁棒性,是当前空间目标识别领域的研究重点。
本文将对空间目标探测与识别方法进行深入研究,包括探测设备的选择与优化、信号处理技术的研究与应用、以及识别算法的设计与实现等方面。
通过对这些关键技术的探讨,旨在为提升我国空间目标探测与识别的能力提供理论支持和技术保障。
1. 空间目标探测与识别的背景与意义随着科技的飞速发展和人类对宇宙探索的深入,空间目标探测与识别技术逐渐成为当今科研领域的热点。
空间目标包括各类卫星、太空碎片、深空探测器以及潜在的太空威胁等,它们的存在与活动对人类的航天活动、地球安全以及宇宙资源的开发利用具有重要影响。
在空间目标探测与识别领域,通过高精度、高可靠性的技术手段对空间目标进行实时、准确的监测与识别,对于保障航天器的安全运行、预防太空碰撞、维护国家安全和促进航天事业的发展具有重要意义。
对于深空探测和宇宙资源的开发利用,空间目标探测与识别技术也提供了有力的技术支撑。
随着太空竞争的加剧,空间目标探测与识别技术也成为各国军事竞争的重要领域。
UWB阵列信号处理算法研究一、前言随着无线通信和定位技术的发展,尤其是 5G 网络的广泛应用,人们对无线数据传输的速度和距离要求越来越高。
这就需要更精确、更快速的信号处理算法来支撑这些应用。
UWB 阵列信号处理算法是一种应对这些需求的有效方式。
二、什么是 UWB 阵列信号处理算法UWB(Ultra Wide Band)广义上指的是信号带宽大于 25% 的信号,但实际运用中一般指带宽大于 500MHz 的信号。
UWB 技术可以克服传统无线通信技术的诸多限制,比如抵抗干扰和多径衰减等。
而阵列信号处理算法则是利用阵列天线接收到的信号进行精确定位或者信号处理的技术。
UWB 阵列信号处理算法结合了这两种技术,它利用 UWB 技术接收信号后,通过算法处理得到所需的信息。
比如可以利用 UWB 阵列信号处理算法进行高精度的测距和定位,可以实现毫米级的定位精度和高速数据传输等功能。
三、UWB 阵列信号处理算法的应用UWB 阵列信号处理算法的应用非常广泛,涵盖了室内定位、室外定位、UWB 通信、UWB 信号检测等领域。
下面简单介绍几个 UWB 阵列信号处理算法的应用案例。
1.室内定位室内定位需要在复杂的室内环境下实现精确定位功能,传统的 GPS 定位技术难以满足这种需求。
利用 UWB 阵列信号处理算法,在室内环境下可以实现精准的定位。
2.室外定位UWB 阵列信号处理算法还可以用于室外定位,因为室外环境多变,加之电磁波在空气中会出现多径效应,对定位造成影响。
利用 UWB 阵列信号处理算法,可以克服这些影响,实现高精度的定位。
3.UWB 通信传统的无线通信技术受到带宽限制和多径效应等因素的影响,通信距离较短。
而 UWB 技术由于带宽和信号功率大,在短距离通信中表现出良好的性能。
利用UWB 阵列信号处理算法可以进一步提升 UWB 通信的性能,实现高速稳定的数据传输。
4.UWB 信号检测在电磁环境中 UWB 信号易被其他电子产品干扰,为此需要对 UWB 信号进行检测和干扰消除。
超宽带室内定位原理及TDOA定位算法作者:李明潘俊臣来源:《科技创新与应用》2017年第02期摘要:室内定位技术是指利用无线通讯、基站定位、惯导定位等多种技术集成形成一套室内位置定位体系,从而实现人员、物体等在室内空间中的位置监控,这一技术可以弥补卫星定位在建筑物内无法定位的缺陷。
目前主要的室内定位技术有红外传播技术、WLAN技术、超声波技术射频识别技术(RFID)、蓝牙技术、ZigBee技术等。
文章主要介绍了超宽带技术在室内定位技术中的应用原理以及TDOA定位算法。
关键词:超宽带;室内定位;TDOA1 概述随着科技的发展与进步,全球卫星定位系统(GPS)已经可以在室外提供稳定、精确的定位导航服务,但在室内或者有障碍物遮挡情况下,GPS因其信号穿透能力较差而无法实现精确的室内定位服务,因此室内定位成为定位导航领域里的“最后一公里”问题。
再加上近年来短距离无线通信和移动网络技术的迅速发展催生了市场对高精度室内定位的强烈需求,所以,如何实现稳定、可靠的室内定位逐渐成为行业内关注的热点。
为解决室内定位这一难题,国内外研究人员尝试了红外传播技术、WLAN技术、超声波技术射频识别技术(RFID)、蓝牙技术、ZigBee技术等。
但受限于作用距离、交互性能、定位精度、抗干扰能力、功耗以及成本等条件,这些室内定位技术都没能广泛推广应用开来。
超宽带(UWB)技术是一种无载波通信技术,其具有的抗干扰能力能强、安全性好、穿透能力强、传输速率高、系统容量大以及功耗非常低等优点使其为室内定位技术提供了另一种可能。
2 超宽带室内定位原理根据美国联邦通信委员会(FCC)的定义,UWB是指相对带宽η大于0.2的信号,即:其中fH和fL分别表示该信号-10dB带宽的高、低频率,fc为中心频率。
图1 最小UWB定位系统如图1所示,最小UWB定位系统主要由标签节点(Tag)、参考节点(Ref)和中央处理模块组成,其中标签节点由被定位者携带其位置是未知的,参考节点与中央处理模块相连,参考节点的位置固定且已知。
WiFi、蓝牙、RFID、红外、ZigBee、UWB哪种室内定位技术更好?我们常用的定位技术当属GPS卫星定位,无论是汽车还是手机导航,都会用到GPS,但一旦到了室内,由于建筑物的遮挡,GPS便无法做到精确的定位。
目前,随着5G技术的发展,新的编码方式、波束赋形、大规模天线阵列、毫米波频谱等为高精度距离测量提供技术支持。
因此,室内定位的研究成为无线传感器网络服务的一个重要分支。
常用的室内定位技术包括:WiFi、蓝牙、RFID、红外、ZigBee、UWB等等,本文就将这几种定位方式进行对比,看看哪种室内定位技术更好。
WiFi定位技术WiFi定位技术是采用经验测试和信号传播模型相结合的方式,对已接入的移动设备进行位置定位,最高精确度大约在1米至20米之间。
如果定位测算仅基于当前连接的WiFi接入点,而不是参照周边Wi-Fi的信号强度合成图,则WiFi定位就很容易存在误差(例如:定位楼层错误)。
另外,WiFi接入点通常都只能覆盖半径90米左右的区域,而且很容易受到其他信号的干扰,从而影响其精度,定位器的能耗也较高。
蓝牙定位技术蓝牙定位技术是目前市场上应用部署比较多的,相对来说也是一种比较成熟的定位技术。
蓝牙和WiFi之间的差别不是太大,但是准确性会比WiFi(3-5m)高一点。
蓝牙定位采用基于蓝牙的三角测距技术,除了使用手机的蓝牙模块外,还需要部署蓝牙信标,可以实现亚米级的最高定位精度,但是是需要布置太多的信标。
蓝牙定位技术的最大优点是体积小,距离短,功耗低,可以集成到手机等移动设备中,只需打开设备的蓝牙功能,就可进行定位。
蓝牙传输不受视线影响,但是对于复杂的工业环境,蓝牙系统的稳定性稍差,抗遮挡能力有待提高,并且容易受到噪声信号的干扰。
RFID定位技术RFID定位的基本原理是通过一组固定的读取器读取目标RFID标签的特征信息(例如身份ID,接收信号强度等),它也可以使用最近邻法,多边定位法,接收信号强度等确定标签位置的方法。
技术盛宴-浅谈UWB室内定位技术技术盛宴| 浅谈UWB室内定位技术技术背景随着无线通信技术的发展和数据处理能力的提高,基于位置的服务成为最有前途的互联网业务之一。
无论移动在室内还是室外环境下,快速准确地获得移动终端的位置信息和提供位置服务的需求变得日益迫切。
通信和定位两大系统正在相互融合、相互促进。
利用无线通信和参数测量确定移动终端位置,而定位信息又可以用来支持位置业务和优化网络管理,提高位置服务质量和网络性能。
所以,在各种不同的无线网络中快速、准确、稳定地获取移动位置信息的定位技术及其定位系统已经成为当前的研究热点。
无线定位技术领域可分为广域定位和短距离无线定位,广域定位可分为卫星定位和移动定位;短距离定位主要包括WLAN、RFID、UWB、蓝牙、超声波等。
当前应用的主要无线定位技术与无线定位测量方法的关联状况如下图:无线定位技术与定位测量方法关联示意图与室外环境相比,在室内环境中感测位置信息并且需要非常可观的精度是极具挑战性的,部分原因是各种物体反射和信号的分散导致。
而UWB(Ultra WideBand)是室内定位领域的一项新兴技术,与其他定位技术相比,它具有更好的性能,更高精度,更适用于室内定位。
UWB定位技术概述UWB超宽带技术与传统通信技术有极大的差异,它不需要使用传统通信体制中的载波,而是通过发送和接收具有纳秒或纳秒级以下的极窄脉冲来传输数据,从而具有GHz量级的带宽。
超宽带室内定位可用于各个领域的室内精确定位和导航,包括人和大型物品,例如贵重物品仓储、矿井人员定位、机器人运动跟踪、汽车地库停车等。
超宽带系统与传统的窄带系统相比,具有穿透力强、功耗低、抗多径效果好、安全性高、系统复杂度低、能提供精确定位精度等优点。
因此,超宽带技术可以应用于室内静止或者移动物体以及人的定位跟踪与导航,且能提供十分精确的定位精度。
但是成本比较昂贵,网络部署复杂。
室内环境中的常用无线定位测量方法无线定位测量方法是指分析接收到的无线电波信号的特征参数,然后根据特定算法计算被测对象的位置(二维/三维坐标:经度,纬度,高度)。
GPS定位系统研究意义现状及应用1 研究意义2 GPS定位系统研究现状及应用1 研究意义GPS是Navigation Satellite Timing and Ranging/Global Positioning System的简称,中文全称为卫星授时测距导航/全球定位系统。
全球定位系统GPS(Global Position System)是美国从上世纪70年代开始研制,1973年美国国防部决定发展各军种共同使用的全球定位系统,并在空军系统司令部空间部成立了一个联合计划办公室,具体负责GPS的研制、实验、采纳和部署。
当时,GPS整个计划分为三个阶段实施,历时30年,耗资200亿,于1994年全面建成,GPS定位系统是具有在海陆空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
该系统是以卫星为基础的无线电导航系统,具有全能性、全球性、全天候、连续性、实时性的导航、定位和授时等多种功能,能为各类静止或高速运动的用户提供精密的瞬间三维空间坐标、速度矢量和精确授时等多种服务。
现在,GPS定位技术除了广泛应用于飞机和水面船只的导航定位外,在陆地道路导航定位系统中也获得了越来越广泛的应用。
随着我国道路建设和汽车工业的飞速发展,便携式的道路实时导航和监控越来越受到人们的普遍关注。
如何使用GPS定位导航系统变得更加轻便、更加准确和可靠已成为人们越来越强烈的需求。
GPS定位技术离不开计算机系统,如果要实现更复杂的功能则需要更加强大的计算机系统。
采用更高级的微计算机系统——嵌入式系统,就可以很好的解决超便携和高性能的矛盾。
目前,市面上几乎所有的便携式GPS定位系统、导航设备都采用嵌入式系统。
当今是科学技术及仪器设备高度智能化飞速发展的信息社会,电子技术的进步,给人们带来了根本性的转变。
现代电子领域中,嵌入式的应用正在不断的走向深入,这必将导致传统控制与检测技术的日益革新。
嵌入控制器因其体积小、可靠性高、功能强、灵活方便等许多优点,其应用已深入到工业、农业、教育、国防、科研以及日常生活等各个领域,对各行各业的技术改造、产品更新换代、加速自动化化进程、提高生产率等方面起到了极其重要的推动作用。
基于OFDM-UWB的室内精密定位系统设计与同步算法研究的开题报告第一部分:选题背景和意义随着无线通信技术和定位技术的不断发展,室内精密定位系统受到越来越多的关注。
随着5G和物联网等技术的不断发展,需要实现对室内物品的精确定位和跟踪,这就需要室内定位技术来支持。
传统的室内定位技术主要依赖于蓝牙、WiFi等技术,这些技术的定位误差较大,不能满足精度要求。
OFDM-UWB技术可以实现高精度的室内定位,成为了室内定位技术的新一代。
本课题旨在设计一个基于OFDM-UWB的室内精密定位系统,并研究OFDM-UWB同步算法。
该系统主要包括OFDM-UWB信号的生成和调制、信号传输和接收、同步算法的研究和设计等方面。
第二部分:研究内容和方法本课题的研究内容主要包括:1. OFDM-UWB信号的生成和调制OFDM-UWB信号的生成和调制是本系统的核心部分。
需要根据系统要求设计OFDM-UWB的相关参数,如带宽、调制方式等。
并且需要实现OFDM信号的生成和UWB信号的调制。
2. 信号传输和接收OFDM-UWB信号需要通过无线信道传输到接收端。
由于室内环境噪声干扰较大,需要对接收信号进行处理,使其满足系统要求。
因此需要实现信号传输和接收模块。
3. 同步算法的研究和设计同步是信号处理的重要环节,针对OFDM-UWB信号的同步算法进行研究和设计是本课题的另一个重点。
需要研究OFDM信号和UWB信号的同步方法,并进行算法的设计和优化。
本课题的研究方法主要包括:1.文献调研通过查阅相关文献,了解OFDM-UWB技术的原理、应用和发展趋势,研究已有的同步算法,为系统设计和算法优化提供参考。
2. 系统设计和仿真基于研究成果,设计OFDM-UWB室内精密定位系统,并进行仿真验证。
通过对仿真结果进行分析,对系统进行优化。
3. 算法设计和验证在对同步算法进行研究的基础上,设计出适合该系统的同步算法,进行仿真验证。
通过对仿真结果的分析和对比,验证算法的准确性和可靠性。
本科毕业设计(论文)题目:GNSS定位系统在车辆定位监控系统中的研究摘要当今,诸多部门,如公安、交通、电力和银行等,都要求在城市环境中对车辆进行连续跟踪和不间断定位。
在经济建设和科学技术的广泛领域,都采用了GPS 与GNNS的精密定位技术。
GPS(GloalPasitioningSystem)以其全球性、全天侯及被动式的定位原理等诸多优势无可争议的成为现在最为广泛使用的定位手段。
现在应用最广泛的是大地测量、海上渔用、陆用导航以及车辆定位监控、其中车辆定位监控的市场增长最为迅速。
针对美国的SA和AS技术政策,目前已有不少国家发展了DGPS 和WADGPS系统,为GPS的发展开辟了新的领域。
GPS在交通车辆监控方面的运用已成为业内讨论并开发的重要课题,各种研究成果层出不穷,然而在实践应用中,该技术还存在一定的不稳定性。
我国也有一些单位生产车载GPS与GNSS系统。
为发展我国的GPS产业,武汉已经成为中国GPS工程技术研究中心。
论文阐述了GPS定位的基本原理及其应用,重点介绍了车辆定位监控平台的应用,开始介绍了GPS的发展现状以及在我国的发展状况。
并分析了它的发展前景、应用、市场分析、GNSS城市车辆监控系统平台的设计以及我国发展GPS的对策。
本文以车辆监控平台为重点论述了GPS在交通车辆监控上新的技术措施,即监控用无线通讯网络协议和指挥中心数字地图监控界面的设计思路和实现技术。
进行车辆监控系统总体设计时所采取的技术措施,达到准(准确显示车辆位置)、精(向量地图生成修正)、全(全国有线无线联网)的实用效果。
关键词:GPS,GNSS,监控平台,技术AbstractToday, many departments, such as public security, transportation, electricity and banking, have called for vehicles in the urban environment of continuous tracking and continuous positioning. In the economic construction and the broad field of science and technology are used precision GPS positioning technology. GPS (GloalPasitioningSystem) with global, all-weather Hou and passive positioning theory, and many other advantages indisputable now become the most widely used means of positioning. It is now the most widely applied geodesy, with sea fisheries, land use and vehicle navigation positioning control, positioning control of the vehicle which most rapid market growth. As sa against the United States and technology policy, there are many developing countries combined and wadgps system for the development of GPS has opened up a new area. GPS monitoring in the use of transport vehicles has become an important topic in discussions and the development of various research results are, however, in practiceapplications, the technology is still some uncertainty.We also have some units producing vehicle GPS systems. For the development of China's GPS industry, Wuhan has become China's GPS engineering research center. GPS positioning papers expounded the basic principles and their application, highlighting the VPS control platform applications began on the GPS in our development and the current development situation. And analysis of the prospects for its development, applications, market analysis, GNSS city vehicle control system design and our development platform GPS approach. This text with the vehicle supervises and control the terrace for the point discuss on the functional GPS vehicle traffic control in the new technical measures that control agreements and the use of wireless command center network monitoring interface design of digital maps and technical achievement. Vehicle control system design, technical measures taken to achieve associate (accurately show vehicles), smart (vector map generated amended), the whole (national cable wireless networking) practical effect.Key words: GPS,GNSS,monitor and control of station,technique目录1.绪论1.1课题背景……………………………………………….1.2 国内的车辆监控系统的研制现状………………………………1.3 本课题研究的内容…………………………………………2. GNSS的发展历史与应用……………………….2.1 GPS的产生与发展………………………………..2.2 GLONASS的产生与发展…………………………………….2.3 GPS系统广泛用途………………………………….3. GPS系统的组成与定位原理………………………..3.1 GPS系统的组成…………………………………..3.1.1 GPS卫星星座3.1.2 地面部分监控系统3.1.3 用户设备—GPS信号接收机3.2 GPS的定位原理…………………………4. GLONASS系统的组成与原理…………………………………………..4.1 GLONASS的组成……………………….4.2 GLONASS的工作原理与特性..5.GNSS系统的产生有构成5.1 GNSS的产生与组成5.2 GNSS系统的特点与优势5.2.1 GNSS系统的特点5.2.2 GNSS系统的优势6 GNSS城市车辆监控系统平台的设计………………………6.1 典型GPS\GNSS应用系统介绍6.2GNSS的城市车辆监控平台的整体结构………………….6.2.1 GNSS定位系统6.2.2 控制中心6.2.3用户集群6.2.4 监控平台的软件设备6.3 监控平台的工作原理6.4 监控平台的主要功能6.5 数字通讯系统GSM………6.6 车辆监控平台的专用GIS平台的功能6.7 监控平台的主要技术特点7定位与导航误差分析………………….8城市监控平台应用的实例分析…………………….结语……………………………………………………………………………………参考文献…………………………………………………………………1. 绪论1.1 课题背景卫星导航与定位应用现如今已发展成为全球性的高新技术产业,并在经历着前所未有的三大转变,这就是从单一的 GPS系统时代转变为多星座并存兼容的GNSS(全球导航卫星系统)时代,从以车辆应用为主体市场格局很快转变为个人消费应用为主流市场的新颖格局,以及从经销应用产品为主逐步转变为运行服务为主的服务产业化新时期。
基于电磁场的无线定位技术创新在当今数字化、智能化的时代,无线定位技术正发挥着日益重要的作用。
从智能手机的导航功能到物流领域的货物追踪,从紧急救援中的人员定位到智能工厂中的设备管理,无线定位技术的应用无处不在。
其中,基于电磁场的无线定位技术因其独特的优势和不断的创新,成为了研究和应用的热点。
电磁场,这个看似抽象的概念,实际上与我们的生活息息相关。
简单来说,电磁场是由电荷和电流产生的一种物理场。
而基于电磁场的无线定位技术,就是利用电磁场的特性来确定目标物体的位置信息。
传统的基于电磁场的无线定位技术,如全球定位系统(GPS),在室外环境中表现出色。
然而,在室内环境或者复杂的电磁环境中,其定位精度往往受到限制。
这是因为室内环境中建筑物的遮挡、多径传播等因素会影响信号的传播和接收,导致定位误差增大。
为了克服这些挑战,研究人员不断进行创新。
一种创新的思路是利用超宽带(UWB)技术。
UWB 技术具有纳秒级的脉冲宽度,能够提供极高的时间分辨率,从而实现厘米级的定位精度。
通过发送和接收极短的脉冲信号,UWB 系统可以精确测量信号的传播时间,进而计算出目标的位置。
另一个创新方向是基于磁场的定位技术。
相比于电场,磁场在某些环境中更稳定,受障碍物的影响较小。
通过在定位区域布置磁场传感器,检测磁场的强度和方向变化,可以实现对目标的定位。
例如,在地下停车场等环境中,基于磁场的定位技术可以为车辆提供准确的停车引导。
同时,多源融合的定位技术也是一个重要的创新趋势。
将电磁场定位与惯性导航、视觉定位等技术相结合,可以充分发挥各种技术的优势,提高定位的可靠性和精度。
例如,当电磁场信号受到干扰时,可以依靠惯性导航系统提供短时间内的位置估计;而在视觉条件良好的情况下,利用视觉定位来校准电磁场定位的结果。
在技术创新的过程中,算法的优化也至关重要。
例如,采用粒子滤波、卡尔曼滤波等算法,可以对测量数据进行更精确的处理和预测,降低噪声的影响,提高定位的准确性。
北斗短报文通信rdss标准-概述说明以及解释1.引言1.1 概述北斗短报文通信是一种基于北斗卫星导航系统的短距离通信技术,通过北斗导航卫星提供的卫星定位和导航功能,实现了人与人、人与物之间的无线短距离通信。
该技术具有全球覆盖、高可靠性和实时性强等特点,广泛应用于国防军事、应急救援、航空航天、交通运输、资源勘探等领域。
北斗短报文通信的主要特点包括以下几个方面:1. 强大的通信能力:北斗短报文通信系统通过卫星网络实现多对多的通信,可以同时连接多个用户设备,满足大规模的通信需求。
同时,其支持高速率的数据传输,可以满足实时通信的要求。
2. 高可靠性:北斗短报文通信系统建立在北斗导航卫星系统之上,具有独立于传统通信网络的独立性和高度可靠性。
即使在通信网络中断或者信号覆盖不稳定的情况下,北斗短报文通信系统仍能够提供可靠的通信保障。
3. 全球覆盖:北斗导航卫星系统具有全球性覆盖能力,无论是在陆地、海洋还是极地等特殊环境中,都可以实现可靠的通信。
这使得北斗短报文通信系统成为一种全球性的通信技术解决方案。
4. 应用广泛:北斗短报文通信系统的应用领域非常广泛,可以用于军事指挥、海事救援、物流运输、灾害应对、油田勘探等多个领域。
其应用范围涵盖了政府、军队、企事业单位和个人等各个层面,为各种行业提供了强大的通信支持。
总体而言,北斗短报文通信系统是一种具有全球覆盖、高可靠性和强大通信能力的短距离通信技术。
随着北斗导航卫星系统的不断完善和发展,北斗短报文通信系统将在更多领域发挥其重要作用,为社会各方面提供更加可靠和高效的通信服务。
1.2文章结构1.2 文章结构本文主要介绍北斗短报文通信和RDSS标准。
文章结构如下:引言部分将简要概述本文的研究背景和意义,引出本文的主题和目的。
正文部分分为两个主要章节,分别是北斗短报文通信和RDSS标准。
2.1 北斗短报文通信部分将详细介绍北斗短报文通信的概念、特点、应用场景和技术原理。
首先,将对北斗系统的基本架构和发射机构进行介绍,然后深入探讨北斗短报文通信的技术特点和能力,包括传输速率、可靠性、时延等方面的分析。
SAR图像高精度定位技术研究合成孔径雷达(SAR)图像是一种通过合成孔径雷达系统获取的遥感图像,具有全天候、全天时、高分辨率等特点。
在军事、民用等领域,SAR图像广泛应用于目标检测、跟踪、识别等应用中。
然而,由于SAR 图像的成像机制和处理过程的复杂性,其定位精度往往受到多种因素的影响,如雷达系统参数、目标特性、图像处理方法等。
因此,研究SAR图像高精度定位技术具有重要的理论和应用价值。
当前SAR图像高精度定位技术的研究主要集中在以下几个方面:基于成像模型的定位技术:该方法通过建立SAR图像的成像模型,推导定位公式,实现高精度定位。
例如,Richards-Rabbitts定位算法是一种常用的基于成像模型的SAR图像定位算法,可实现高精度的距离和方位角估计。
基于特征提取的定位技术:该方法通过提取SAR图像中的纹理、边缘、相位等特征,利用计算机视觉和图像处理技术实现高精度定位。
例如,基于深度学习的特征提取方法可有效提高SAR图像的定位精度。
基于模型的定位技术:该方法通过建立SAR系统的数学模型,利用模型拟合和参数估计方法实现高精度定位。
例如,基于压缩感知技术的SAR图像重建方法可提高定位精度,同时降低计算复杂度。
虽然上述方法在某些情况下能够实现较高的定位精度,但仍然存在一些问题。
基于成像模型的定位技术往往需要精确的系统参数和复杂的计算过程,实时性较差。
基于特征提取的定位技术容易受到图像质量、噪声等因素的影响,稳定性较差。
基于模型的定位技术需要准确的模型和足够的训练数据,对于复杂场景和不同目标类型的适应性有待进一步提高。
SAR图像高精度定位技术的核心是通过对SAR图像中目标特征的提取和识别,确定目标在图像中的精确位置。
具体实现过程如下:SAR图像预处理:由于SAR图像的成像机制和处理过程的复杂性,往往需要进行预处理操作,如滤波、去噪、平移校正等,以提高图像质量和定位精度。
目标特征提取:利用SAR图像中的纹理、边缘、相位等特征,提取出目标在图像中的特征表现,如多尺度边缘检测、相位梯度等。
短距离高精度无线定位方法的研究及实现王侃磊张倩胡爱群东南大学信息安全研究中心,南京,210096
摘要节点定位作为无线传感网络的关键技术,已成为国内外的研究热点。本文首先对当今无线定位技术进行了介绍,现有的技术在短距离定位上精度不够;然后针对两种定位测距技术进行改进,提出了基于信号相关性的TDOA测距方案和基于信号变频反射的TOA测距方案;接着对这两种方案进行了仿真实验,讨论了各自的优缺点;最后得出了基于信号变频反射的TOA测距方案更适合应用于短距离高精度无线定位系统的结论。关键词定位TDOA变频反射TOA
一、引言无线传感器网络(WsNs,wirelesssensornetworks),是由众多感知、计算和通信能力的传感器节点组成,通过无线通信的方式形成一个多跳的自组织网络系统。无线传感器网络被评为对21世纪产生巨大影响力的技术之一,其应用遍布生活各个层面,特别在国防和重大灾害事件监测等领域。节点定位技术是无线传感器网络应用的关键支撑技术,在目标的定位和跟踪以及提高路由效率等方面都发挥着重要的作用。它能够间接提升无线Adhoc网络路由的有效性;利用基于节点位置的网络协议,能够进一步减少网络节点的数量。因此,定位算法的研究对传感器网络的有效性起着关键作用[1]。目前,户外系统中使用较为广泛的有全球定位系统(GPS,globalpositioningsys-
tern),但是GPS系统不适合用于无线传感网络,原因包括:1)卫星信号无法穿透建筑物,无法在室内环境中使用。2)GPS定位精度无法达到定位要求。3)传感网络能量有限,需要对GPS系统进行特殊设计。其他的定位技术可分为基于测距的定位算法和与距离无关的定位算法。基于测距的定位算法通过测量节点间点到点的距离或角度信息,使用基本计算方法计算节点位置,典型算法有TOA(timeofarrival)、TDOA(timedifferent
onarrival)和RSSI(receivedsig-
nalstrength
indicator)[23;与距离无关的定位算法则无需距离和角度信息,仅根据网络的
连通性等信息即可实现,常用的算法包括DV-hop,APIT等。基于测距的定位算法对节点硬件配置的要求比与距离无关的算法要高,但其定位精度优于与距离无关的算法,因此更适合短距离(o~100m)定位精度要求较高的环境。其中,基于RSSI的定位算法定位误差大,受环境影响严重,文献E33中提出最小二乘拟合法、信号强度分布法以及混合定位法,定位精度可以提高到2m以内,但是定位范围仅有lOm。文献[4]中提出基于RSSI和LQI的动态距离估计算法,通信距离在10~80m,定位误差在10m左右,通信距离大于80m,定位误差在7m以下。针对短距离高精度的定位环境本文提出基于TDOA和TOA的定位算法的两种定位方案,并对这两种方案进行仿真测试。二、基于测距的定位方案研究1.基于信号相关性的TDOA定位方案(1)原理概述同一直线上的移动终端在两个固定的接收机之间发射无线信号,两端的接收机接收到信号的时间和相位是不同的,其差异反映了移动终端的位置信息。图1是TDOA测距的系统原理图。通过测量两个接收机A、B接收信号时间差或相位差,能够得到移动节点D的位置信息。
图1TDOA测距系统原理图相位较时间放大了很多,工程上易于实现,但是相位是与频率相关的,且以360。为周期,超出了这个范围就存在相位模糊的问题。相位的测量通常通过测量RSSI值实现,容易受环境的影响,测量精度较低。利用时差定位可以避免相位模糊的问题,但是直接测量到达两个接收机时间差是十分困难的,在50m的测距范围内,最大的时间差仅有150ns。如果移动节点位于两接收机中点附近,则接收机接收到信号的时间差值更加微小,通过计时来精确计算移动节点位置是比较困难的。利用信号的相关性间接可以得到两信号到达时间差。对两端接收机接收到的基带信号进行异或。异或信号与两信号到达的时间差相关,时间差的不同直接导致异或信号脉宽不同。但是,在10m测距的范围内,异或信号的脉宽在0~300ns之间,对这样的单个信号的测量在硬件上是几乎无法实现的。通过对多个异或信号积分,积分值的大小对应异或信号的脉宽,可以得到信号到达时间差,从而得到移动节点的位置信息。图2~图5是对接收信号进行异或、积分的波形示意图。口(£)是A端接收到的基带信号,它其实是发射端发射的基带信号的Aza延时,6(£)也一样,其延时值为Atb。c(z)为口(£)异或6(f):波形,在每个基带信号的跳变处会产生两个窄脉冲,每个窄脉冲宽度为IAta—AtbI。把这些脉冲积分后就能得到图5中i(£),由此能测出距离。
图2接收信号口(£)图3接收信号6(£)1.山0JulL:图4口(£)、6(£)异或后信号c(f)图5积分信号i(£)(2)方案设计及实验仿真基于接收信号相关性的TDOA定位系统结构如图6所示。接收机A、B为固定端,移动节点D为移动端。计算中心位于两接收机中点处,通过有线方式与两个接收机相连。移动节点在A、B之间移动,间断地向A、B发送射频信号。
图6基于信号相关性的系统框图测距过程如下:1)移动节点D向接收机A和B同时发射n个周期的数字调制波。2)接收机A、B接收D的信号、解调,然后将解调的数字信号通过有线方式发送到计算中心C。3)计算中心C用CPLD对接收的两路信号进行异或,产生咒个窄脉冲,并判断A、B信号到达的信后顺序。4)积分器对咒个异或窄脉冲进行积分。5)单片机根据积分值计算A、B接受的信号的时间差,进而计算D的位置。本文采用SystemView平台对系统进行仿真。在信道中引人功率谱密度为n。的加性高斯白噪声。对A、B接收的基带信号异或后积分,根据不同的积分值可以得到A、B接收的信号时间差,即移动节点发送信号到达接收机A、B的时间差。实验分别引入噪声功率谱密度为50×10_15W/Hz和100×10.15W/Hz和加性高斯白噪声,分别对5、10、·808·100个周期的异或信号进行积分,最后根据积分值计算A、B的时间差,如图7和图8所示。
乓粕魃
嘲窝j|}|j扈蟹
实际接收时间差/魑图7功率谱密度为50×10_15W/Hz时的测量误差(nS)
图8功率谱密度为200X10-15w/Hz时的测量误差(Ils)测试结果表明,该系统的理论测距精度在lm以内。通过不同噪声环境下的仿真结果可见在噪声比较大的时候误差也比较大。在同一噪声环境下,时间差越长,信噪比越低,因而误差越大。在不同噪声环境下:小噪声情况下,积分周期少时误差比较小;大噪声情况下,积分周期越长误差越小。对应实验,100个周期时测量误差比较小。这是因为,在引入高斯白噪声的信道中,积分既会将噪声平均使其影响减小,也会将噪声误差累积使其影响更加明显。仿真试验表明,在噪声比较小的环境中,积分的误差累计效果更加明显;在噪声比较大的环境中,积分的噪声平均效果更明显,因此适宜对多个异或信号积分。两个接收机信号前后顺序的判断效果对定位精度也有很大的影响。本系统中使用CPI。D逻辑判断两信号的前后顺序,然而,实际的CPI。D芯片内部都存在逻辑门延时,如果两接收机信号的时间差小于等于芯片内部逻辑门延时,则无法判断两接收机接收信号的前后顺序。所以,该定位系统无法对位于中点附近的移动节点准确定位。在确定噪声环境和异或信号积分周期的情况下,芯片逻辑门延时和对积分值的分辨·809·率决定了定位的精度。系统通过有线进行数据的传递,降低了系统的安全性、鲁棒性,布设成本比较高。
2.基于变频反射的TOA定位方案(1)原理概述TOA是最直接的无线定位技术。基于信号到达时间定位的基本方法是测量基站到移动终端发射信号的时间进而计算移动终端到基站的距离。图9给出了TOA测距的原理图。剖~垴
图9TOA测距的原理框图基站发射电磁波,同时开始计时,电磁波在空中传播后,移动终端接收到电磁波,同时停止计时。计时结果是电磁波从发射机到接收机所传播的时间t。于是,发射机到接收机之间的直线距离L可以用下式求得,即L—t×C(1)其中,c是电磁波在空中传播速度,接近真空中光速,约为3×108m/s。如果能够精确得到t,就能够对移动终端精确测距。由于电磁波在的传播速率非常快,仅需300多纳秒即可传播100m的距离,所以要在短距离中实现精度小于lm的精确定位,需要能够达到3ns的分辨率。另一方面,采用传统TOA定位方案要求基站和移动终端严格时间同步。利用协议通信能够实现移动端与基站保持同步,然而,大多数同步技术产生的同步误差在几微秒到几十微秒之间[s]。1肛s的同步误差会产生300m的定位误差,因此利用协议同步可行性非常低。本文提出利用电磁波“反射”测距的方案,基站控制信号的收发以及计时器的开始和结束。移动端收到电磁波后再回传电磁波,当基站接收到回传的电磁波后立即停止计时,通过计时得到的值t能够得到两端的距离LL一(£一to)/2×f(2)其中,t。是电磁波在移动终端内部的延时,它包括电磁波在经过滤波、低噪声放大、解调等内部电路处理的延时。通常,对固定的电路、特定的调制方式的无线信号,t。可以认为是一个常量。移动终端需要判断是否已经接收到无线信号,就要求无线信号中具有调制的信息,并且对该信息进行解调。假设在信号中调制500kp/s的信息,接收到lbit信息需要2弘s。同样,对于短距离测距来说2弘s是无法接受的,且其波特率的误差直接影响到测量误差。为了把这个误差消除,提高定位精度,本文提出了变频反射的思想,解决了这个问题。图10给出了基于变频反射的TOA系统方案图。在计时端,单片机控制计时的开始以及信号的发射。移动端不对信号进行解调,仅对信号进行变频处理,仍然保持着原有的调制方式,因此可以看作把无线信号直接“反射”回·810·