机器人学导论习题
- 格式:doc
- 大小:406.50 KB
- 文档页数:5
机器人学导论(克雷格)第二章作业答案■标准化文件发布号:(9456・EUATWK・MWUB・WUNN・INNUL-DDQTY-KII2.1 solution:According to the equation of pure transition transformation^he new point after transition is as follows:2.3 solution:According to the constraint equations: 〃 • d = 0;〃 • o = 0;d • o = 0n = 1Thus,the matrix should be like this:'o0 -1 5"0 -1 5" 1 0 0 3 or -10 0 3 0 -1 02 0 -1 0 2 01_012.4= Trans (d x , d y , ) x P ()ldSolution:Solution:According to the equation of pure rotation transformation , the new coordinates are as follows:2.9 Solution:Acording to the equations for the combined transformations ,the new coordinates are as follows:2.71P new = rot(xA5 )xP = 0V22返V22 .7A /2Transformations relative to the current frame 2.10此T「ans(536)Rot(x,90)Rot(a,90) P10_丁'1 '0 3 100 4 91 1 10 -1t. 1 0A P = Rot(z,90 )X Trans(5y3,6)x Rot(x.90°)x P= ° Q0 0 Tran sformatio ns relative to the ref ere nee frame(/O 5 10 10 3 0 0-1 0 10 0 00 10 0 0 0 100\Q 02.120. 0.369 -0.766 -0.601Tl = 0.574 0.819 0 -2.9470.6 28 0.439 0.643 -5.38OJ00 0 -0.39 -3.820 -60.3 0.92 ・3.79\0 02.14a) For spherical coordinates we have (for posihon )1)r cos y sin 0 二 3.13752)r sin ysin 0 二 2.1953)r cosp = 3.214I) Assuming sin P is posihve, from a and b —> y二35°from b and c t 0二50°unitsII) If sin p were negative. ThenY二35。
机器人导论考试题及答案一、单项选择题(每题2分,共20分)1. 机器人的定义是由谁提出的?A. 阿西莫夫B. 约瑟夫·恩格尔伯格C. 乔治·德沃尔D. 艾萨克·阿西莫夫答案:C2. 机器人的三大核心组成部分不包括以下哪一项?A. 传感器B. 控制器C. 执行器D. 能源供应答案:D3. 以下哪个不是机器人的自由度?A. 旋转B. 平移C. 缩放D. 摆动答案:C4. 在机器人运动学中,以下哪个参数是描述机器人末端执行器位置和姿态的?A. 速度B. 加速度C. 位置D. 姿态答案:D5. 机器人的传感器不包括以下哪一项?A. 视觉传感器B. 力觉传感器C. 触觉传感器D. 声音传感器答案:D6. 以下哪个不是机器人的驱动方式?A. 电动B. 气动C. 液动D. 热动答案:D7. 机器人的编程语言不包括以下哪一项?A. 机器人语言B. 过程控制语言C. 面向对象语言D. 汇编语言答案:D8. 机器人的控制系统不包括以下哪一项?A. 传感器系统B. 控制器C. 执行器D. 用户界面答案:C9. 以下哪个不是机器人的分类方式?A. 按应用领域分类B. 按移动方式分类C. 按智能程度分类D. 按能源供应分类答案:D10. 以下哪个不是机器人的发展趋势?A. 智能化B. 网络化C. 微型化D. 去自动化答案:D二、多项选择题(每题3分,共15分)11. 机器人的传感器系统包括以下哪些?A. 视觉传感器B. 力觉传感器C. 触觉传感器D. 温度传感器答案:ABCD12. 机器人的控制方式包括以下哪些?A. 开环控制B. 闭环控制C. 自适应控制D. 模糊控制答案:ABCD13. 机器人的应用领域包括以下哪些?A. 制造业B. 医疗领域C. 服务业D. 军事领域答案:ABCD14. 机器人的驱动方式包括以下哪些?A. 电动B. 气动C. 液动D. 磁动答案:ABC15. 机器人的编程方法包括以下哪些?A. 指令级编程B. 模块化编程C. 面向对象编程D. 人工智能编程答案:ABCD三、判断题(每题2分,共10分)16. 机器人的自由度越多,其灵活性越高。
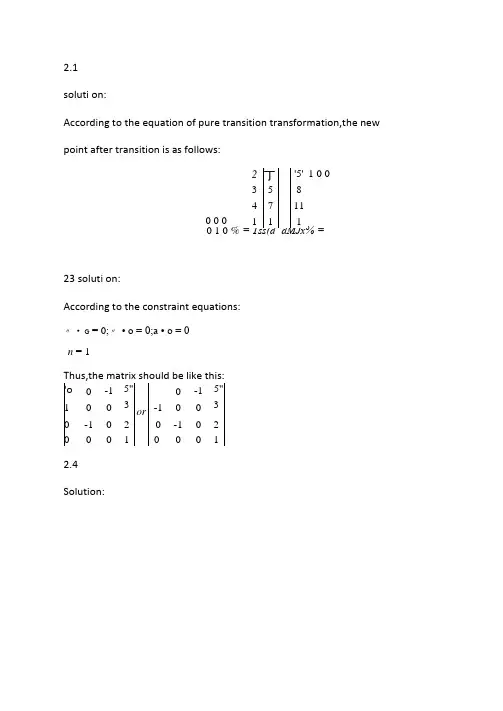
2.1 soluti on:According to the equation of pure transition transformation,the new point after transition is as follows:1 0 0 0 1 0 % = Tss(d“dMJx% =23 soluti on:According to the constraint equations:〃 • G = 0;〃 • o = 0;a • o = 0n = 1Thus,the matrix should be like this: 'o 0 -1 5"0 -1 5"1 00 3 or -1 0 0 30 -1 0 2 0 -1 0 2 0 0 0 1_0 0 0 12.4 Solution:2 丁 '5'3 58 4 7111 110 0 0coordinates are as follows:2.9Solution:Acording to the equations for the combined transformations ,the new coordinates are as follows:According to the equation of purerotation transformation , the new化川=s 心,45°)xP =Solution:V2 2返2o-丁'1 ' 0 310 0 49 1 110 1 0 00 -1 t . 1 0 AP = Rot(z,90 )X Trans(5y 3,6)x Rot(x.90°)x P= ° Q0 0Transformations relative to the reference frameTransformations relative to the current frame 2.10 A P=Trans(5,3,6)Rot(x,90)Rot(a,90) P二 -28 12.12而.527 0.369 -0.766 -0.601、T11 二-0.5740.819 0 -2.9472.14 a) For spherical coordinates we have (for posihon )1) r • cos y • sin 0 二 3.1375 2) r • siny • sin p = 2.195 3) r • cos P = 3.214I) Assuming sin P is posihve, from a and b —> y 二350 0o'「0-1 00\r3 0 0 -1 0 1 0 0 0 361 0 00 1 0 5 V0 0 lyJ< 1 >0 10 0 0 1 <0 0 0 0.6280.4390.643-5.380.92 -0.39 -3.82 -60.390.92 -3.79from b and c t 卩二50°r r unitsfrom c — r=5II) If sin p were negative. ThenY 二35°0 二50°r 二护tsSince orientation is not specified, no more information is available to check the results・b) For case I, substifa te corresp on ding values of sinR , cosp, siny, cosyand r in sperical coordinates to get:/O5265 -0.5735 0.6275 3.1375^ Tsph(Gp?Y)=Tsph(35,50,5)= 0.3687 0.819 0.439 2.195-0.766 0 0.6428 3.214< °0 0—2.16Solution:According to the equations given in the text book, we can get the Euler angles as follows:①①=arctan arctan 2(a v,a,)Which lead to :① = 215」o 厂35° ②W = arctan+”、C ①,一 yS ①+①)=0 or\80③ 。
机器人学导论作业答案作业一一、问答题1.答:机器人的主要应用场合有:(1) 恶劣的工作环境和危险工作;(2) 在特殊作业场合进行极限作业;(3) 自动化生产领域;(4) 农业生产;(5) 军事应用。
2.答:工业机器人(英语:industrial robot。
简称IR)是广泛适用的能够自主动作,且多轴联动的机械设备。
它们在必要情况下配备有传感器,其动作步骤包括灵活的转动都是可编程控制的(即在工作过程中,无需任何外力的干预)。
它们通常配备有机械手、刀具或其他可装配的的加工工具,以及能够执行搬运操作与加工制造的任务。
数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。
该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,从而使机床动作并加工零件。
3.答:科幻作家阿西莫夫机器人三原则:(1) 不伤害人类;(2) 在原则下服从人给出的命令;(3) 在与上两个原则不矛盾的前提下保护自身。
我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
4.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2) 机器人运动学;(3) 机器人静力学;(4) 机器人动力学;(5) 机器人控制技术;(6) 机器人传感器;(7) 机器人语言。
5.答:按几何结构分:(1) 直角坐标式机器人;(2) 圆柱坐标式机器人;(3) 球面坐标式机器人;(4) 关节式球面坐标机器人。
6.答:通常由四个相互作用的部分组成:执行机构、驱动单元、控制系统、智能系统。
7.答:一共需要5个:定位3个,放平稳2个。
8.答:机器人的主要特点有通用性、适应性。
决定通用性有两方面因素:机器人自由度;末端执行器的结构和操作能力。
9.答:工业机器人的手部是用来握持工件或工具的部件。
大部分的手部结构都是根据特定的工件要求而专门设计的。
机器人学导论第三章课后答案1、下面是奇奇在学习本单元时所作笔记的部分内容,其中说法不正确的是()[单选题] *A.拆解电动机时,要注意安全使用螺丝刀等工具B.用电器与发电机在工作时都是将其他形式的能转化为电能(正确答案)C.用思维导图或表格都能清楚地表示各种发电方式的能量转化情况2、对于制作校园生物分布图,下面说法不正确的是( )。
[单选题] *A.给生物编号,将号码记录在分布图上,可以有空间记录更多生物B.制作校园生物分布图必须独立完成(正确答案)C.分布图是整理信息,找出研究成果的好方法3、不同时期、不同类型的船具有不同的特点和发展趋势。
[判断题] *对(正确答案)错4、35铁钉生锈速度最快的是( )。
[单选题] *A.铁钉完全浸没在水中B.铁钉一半浸在水中一半暴露在空气中(正确答案)C.铁钉一半浸在油中一半在干燥的空气中5、藻类植物属于绿色开花植物。
( ) [单选题]对错(正确答案)6、“地心说”认为,()是宇宙的中心,并且静止不动。
[单选题] *A.地球(正确答案)B.太阳C.月球7、太阳系中,体积最大的行星是( )。
[单选题] *A.地球B.金星C.木星(正确答案)8、种子发芽的过程中最先出现的现象是()。
[单选题] *A.长出嫩芽B.种皮破裂C.种子膨大(正确答案)9、小船在行驶过程中容易偏离方向,以下()的方法能让小船保持一定的方向。
[单选题] *A.安装上船舵(正确答案)B.安装上风力推进装置C.安装蒸汽推进装置10、以下没有新物质产生的变化是( )。
[单选题] *A.水蒸发变成水蒸气(正确答案)B.白醋浸泡贝壳C.白糖加热变成焦糖11、设计制作小船需要考虑的因素是()。
[单选题] *A.经费预算B.材料和结构C.安全可靠12、蜡烛燃烧发生的变化属于( )。
[单选题] *A.物理变化B.化学变化C.物理变化和化学变化(正确答案)13、家用灯泡工作时既能发光,同时也会发热,说明电灯可以把电能转化为()。

机器人导论考试题及答案一、单项选择题(每题2分,共20分)1. 机器人的三大核心组成部分不包括以下哪一项?A. 传感器B. 执行器C. 控制器D. 能源系统答案:D2. 以下哪个不是机器人的自由度?A. 线性运动B. 旋转运动C. 振动运动D. 平面运动答案:C3. 机器人的坐标系统通常采用哪种类型?A. 笛卡尔坐标系B. 极坐标系C. 球坐标系D. 柱坐标系答案:A4. 机器人的路径规划通常不包括以下哪一项?A. 避障B. 路径优化C. 速度控制D. 颜色识别答案:D5. 以下哪个传感器不是用于机器人视觉系统的?A. 红外传感器B. 摄像头C. 激光雷达D. 超声波传感器答案:D6. 机器人的伺服电机通常采用哪种控制方式?A. 开环控制B. 闭环控制C. 半闭环控制D. 无反馈控制答案:B7. 机器人的关节驱动方式不包括以下哪一项?A. 电动B. 气动C. 液压D. 磁力答案:D8. 以下哪个不是机器人编程语言的特点?A. 高级语言B. 易于学习C. 难以理解D. 可移植性答案:C9. 机器人的安全性设计中不包括以下哪一项?A. 急停按钮B. 限位开关C. 过载保护D. 颜色搭配答案:D10. 以下哪个不是机器人操作系统(ROS)的功能?A. 硬件抽象B. 底层设备控制C. 进程间消息传递D. 网络服务答案:B二、多项选择题(每题3分,共15分)1. 机器人的传感器系统包括以下哪些?A. 力觉传感器B. 触觉传感器C. 视觉传感器D. 温度传感器答案:ABCD2. 机器人的运动学分析包括以下哪些?A. 正向运动学B. 逆向运动学C. 动力学分析D. 静态平衡分析答案:AB3. 机器人的控制策略包括以下哪些?A. PID控制B. 模糊控制C. 神经网络控制D. 遗传算法控制答案:ABCD4. 机器人的人工智能技术包括以下哪些?A. 机器学习B. 自然语言处理C. 计算机视觉D. 专家系统答案:ABCD5. 机器人的机械结构设计需要考虑以下哪些因素?A. 材料选择B. 强度和刚度C. 重量和尺寸D. 制造成本答案:ABCD三、简答题(每题5分,共20分)1. 简述机器人的发展历程。
机器人导论考试题及答案一、单项选择题(每题2分,共20分)1. 机器人的三大核心组成部分是()。
A. 机械结构、传感器、控制算法B. 机械结构、传感器、能源系统C. 机械结构、控制算法、能源系统D. 传感器、控制算法、能源系统答案:A2. 以下哪个不是机器人传感器的类型?()A. 视觉传感器B. 力觉传感器C. 触觉传感器D. 嗅觉传感器答案:D3. 机器人的自由度是指()。
A. 机器人能够移动的关节数量B. 机器人能够达到的空间位置数量C. 机器人能够达到的空间方向数量D. 机器人能够执行的动作数量答案:A4. 机器人的控制方式中,()是指机器人能够根据环境变化自主调整行为。
A. 开环控制B. 闭环控制C. 自适应控制D. 预设控制答案:C5. 以下哪个不是机器人编程语言的特点?()A. 高级抽象B. 易于人类理解C. 直接与硬件交互D. 便于调试和维护答案:C6. 机器人的路径规划中,()是指机器人在移动过程中避免障碍物的能力。
A. 避障B. 导航C. 定位D. 跟踪答案:A7. 机器人的操作系统中,()是指操作系统能够同时处理多个任务的能力。
A. 多任务处理B. 实时性C. 可预测性D. 稳定性答案:A8. 机器人的能源系统中,()是指能源的存储和供应方式。
A. 能源转换B. 能源管理C. 能源供应D. 能源效率答案:C9. 机器人的机械臂中,()是指机械臂末端执行器能够到达的空间区域。
A. 工作范围B. 工作速度C. 工作精度D. 工作负载答案:A10. 机器人的安全性中,()是指机器人在执行任务时不会造成人身伤害或财产损失。
A. 环境适应性B. 操作安全性C. 任务可靠性D. 能源效率答案:B二、多项选择题(每题3分,共15分)11. 机器人的分类可以基于哪些特征?()A. 应用领域B. 移动能力C. 操作方式D. 能源类型答案:ABCD12. 机器人的传感器可以用于哪些目的?()A. 环境感知B. 状态监测C. 任务执行D. 通信答案:AB13. 机器人的控制算法可以基于哪些理论?()A. 经典控制理论B. 现代控制理论C. 人工智能D. 机器学习答案:ABCD14. 机器人的编程语言需要具备哪些特性?()A. 高效性B. 可读性C. 可扩展性D. 兼容性答案:ABCD15. 机器人的能源系统可以包括哪些类型?()A. 电池B. 燃料电池C. 太阳能D. 核能答案:ABC三、判断题(每题2分,共10分)16. 机器人的自由度越多,其灵活性和能力就越强。
机器人导论考试题及答案一、单项选择题(每题2分,共20分)1. 机器人的三大核心组成部分是()。
A. 传感器、控制器、执行器B. 传感器、计算机、执行器C. 传感器、控制器、驱动器D. 传感器、控制器、机械臂答案:A2. 机器人的自由度是指()。
A. 机器人可以移动的关节数量B. 机器人可以控制的关节数量C. 机器人可以移动的坐标轴数量D. 机器人可以控制的坐标轴数量答案:C3. 以下哪个不是机器人传感器的类型()。
A. 触觉传感器B. 视觉传感器C. 听觉传感器D. 嗅觉传感器答案:D4. 机器人编程语言中,()是一种高级语言。
A. LISPB. PrologC. PythonD. Assembly答案:C5. 机器人的路径规划通常不包括以下哪一项()。
A. 路径优化B. 避障C. 速度控制D. 颜色识别答案:D6. 工业机器人中,()是最常见的机器人类型。
A. 直角坐标机器人B. SCARA机器人C. 圆柱坐标机器人D. 球坐标机器人答案:B7. 机器人的伺服系统通常不包括以下哪一项()。
A. 电机B. 驱动器C. 控制器D. 传感器答案:D8. 以下哪个是机器人的末端执行器()。
A. 传感器B. 电机C. 机械臂D. 夹持器答案:D9. 机器人的控制算法中,()是一种常用的轨迹规划方法。
A. PID控制B. 模糊控制C. 遗传算法D. 贝塞尔曲线答案:D10. 机器人的安全性通常不包括以下哪一项()。
A. 紧急停止B. 速度限制C. 力限制D. 颜色识别答案:D二、多项选择题(每题3分,共15分)11. 机器人的传感器可以用于()。
A. 环境感知B. 物体识别C. 导航定位D. 路径规划答案:ABC12. 机器人的驱动方式包括()。
A. 电动B. 气动C. 液压D. 磁动答案:ABC13. 机器人的编程方法包括()。
A. 离线编程B. 在线编程C. 示教编程D. 自动编程答案:ABC14. 机器人的控制策略包括()。
中南大学网络教育课程考试复习题及参考答案机器人学导论一、名词解释:1.自由度2.机器人工作载荷3.柔性手4.制动器失效抱闸5.机器人运动学6.机器人动力学7.虚功原理8.PWM驱动9.电机无自转10.直流伺服电机的调节特性11.直流伺服电机的调速精度12.PID控制13.压电元件14.图像锐化15.隶属函数16.BP网络17.脱机编程18.AUV二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
3.如图所示为平面内的两旋转关节机械手,已知机器人末端的坐标值{x ,y },试求其关节旋转变量θ1和θ2.P4.如图所示两自由度机械手在如图位置时(θ1= 0 , θ2=π/2),生成手爪力 F A = [ f x 0 ]T 或F B = [ 0 f y ]T 。

S OLUTIONS M ANUALI NTRODUCTION TOR OBOTICSM ECHANICS AND C ONTROLT HIRD E DITIONJ OHN J.C RAIGUpper Saddle River, New Jersey 07458Associate Editor: Alice DworkinExecutive Managing Editor: Vince O'BrienManaging Editor: David A. GeorgeProduction Editor: Craig LittleSupplement Cover Manager: Daniel SandinManufacturing Buyer: Ilene Kahn©2005 by Pearson Education, Inc.Pearson Prentice HallPearson Education, Inc.Upper Saddle River, NJ 07458All rights reserved. No part of this book may be reproduced in any form or by any means, without permission in writing from the publisher.The author and publisher of this book have used their best efforts in preparing this book. These efforts include the development, research, and testing of the theories and programs to determine their effectiveness. The author and publisher make no warranty of any kind, expressed or implied, with regard to these programs or the documentation contained in this book. The author and pub-lisher shall not be liable in any event for incidental or consequential damages in connection with, or arising out of, the furnishing, performance, or use of these programs.Pearson Prentice Hall®is a trademark of Pearson Education, Inc.This work is protected by United States copyright laws and is provided solely for the use of instructors in teaching their courses and assessing student learning. Dissemination or sale of any part of this work (including on the World Wide Web) will destroy the integrity of the work and is not permitted. The work and materials from it should never be made available to students except by instructors using the accompanying text in their classes. All recipients of this work are expected to abide by these restrictions and to honor the intended pedagogical purposes and the needs of other instructors who rely on these materials.Printed in the United States of America10 9 8 7 6 5 4 3 2 1ISBN 0201-54362-1Pearson Education Ltd., LondonPearson Education Australia Pty. Ltd., SydneyPearson Education Singapore, Pte. Ltd.Pearson Education North Asia Ltd., Hong KongPearson Education Canada, Inc., TorontoPearson Educación de Mexico, S.A. de C.V.Pearson Education—Japan,TokyoPearson Education Malaysia, Pte. Ltd.Pearson Education, Inc., Upper Saddle River, New Jersey。
中南大学网络教育课程考试复习题及参考答案机器人学导论一、名词解释题: 1.自由度: 2.机器人工作载荷: 3.柔性手:4.制动器失效抱闸: 5.机器人运动学: 6.机器人动力学: 7.虚功原理: 8.PWM 驱动: 9.电机无自转: 10.直流伺服电机的调节特性: 11.直流伺服电机的调速精度: 12.PID控制: 13.压电元件: 14.图像锐化: 15.隶属函数: 16.BP 网络: 17.脱机编程: 18.AUV:二、简答题: 1.机器人学主要包含哪些研究内容?图像预处理步骤?模糊控制器的轮式行走机构和足式行走机构的特点和各自适用的场合 2.如图所示具有三旋转关节的3R机械手, 3.如图所示为平面内的两旋转关节机械手 4.如图所示两自由度机械手在如图位置时(θ1= 0 , θ2=π/2),生成手爪力 FA = [ fx 0 ]T 或FB = [ 0 fy ]T。
求对应的驱动力τA和τ B 。
5.如图所示的两自由度机械手,手部沿固定坐标系在手上X0轴正向以1.0m/s的速度移动,杆长1=l2=0.5m。
设在某θ1=30°,θ2=-60°,求该时刻的关节速度。
已知两自由度机械手速度雅可比矩阵为 6.如图所示参考答案一、名词解释题: 1.自由度:指描述物体运动所需要的独立坐标数。
2.机器人工作载荷:机器人在规定的性能范围内,机械接口处能承受的最大负载量(包括手部)。
3.柔性手:可对不同外形物体实施抓取,并使物体表面受力比较均匀的机器人手部结构。
4.制动器失效抱闸:指要放松制动器就必须接通电源,否则,各关节不能产生相对运动。
5.机器人运动学:从几何学的观点来处理手指位置与关节变量的关系称为运动学。
6.机器人动力学:机器人各关节变量对时间的一阶导数、二阶导数与各执行器驱动力或力矩之间的关系,即机器人机械系统的运动方程。
7.虚功原理:约束力不作功的力学系统实现平衡的必要且充分条件是对结构上允许的任意位移(虚位移)施力所作功之和为零。
1 1. 自由度:指描述物体运动所需要的独立坐标数。 2. 机器人工作载荷:机器人在规定的性能范围内,机械接口处能承受的最大负载量(包括手部)。 3. 柔性手:可对不同外形物体实施抓取,并使物体表面受力比较均匀的机器人手部结构。 4. 制动器失效抱闸:指要放松制动器就必须接通电源,否则,各关节不能产生相对运动。 5. 机器人运动学:从几何学的观点来处理手指位置与关节变量的关系称为运动学。 6. 机器人动力学:机器人各关节变量对时间的一阶导数、二阶导数与各执行器驱动力或力矩之间的关系,即机器人机械系统的运动方程。 7. 虚功原理:约束力不作功的力学系统实现平衡的必要且充分条件是对结构上允许的任意位移(虚位移)施力所作功之和为零。 8. PWM驱动:脉冲宽度调制驱动。 9. 电机无自转:控制电压降到零时,伺服电动机能立即自行停转。 10. 直流伺服电机的调节特性:是指转矩恒定时,电动机的转速随控制电压变化的关系。 11. 直流伺服电机的调速精度:指调速装置或系统的给定角速度与带额定负载时的实际角速度之差,与给定转速之比。 12. PID控制:指按照偏差的比例、积分、微分进行控制。 13. 压电元件:指某种物质上施加压力就会产生电信号,即产生压电现象的元件。 14. 图像锐化:突出图像中的高频成分,使轮廓增强。 15. 隶属函数:表示论域U中的元素u属于模糊子集A的程度,在[0, 1]闭区间内可连续取值。 16. 脱机编程:指用机器人程序语言预先进行程序设计,而不是用示教的方法编程。 17. AUV:无缆自治水下机器人,或自动海底车。 二、简答题: 1.机器人学主要包含哪些研究内容? 2.机器人常用的机身和臂部的配置型式有哪些? 4.机器人控制系统的基本单元有哪些? 5.直流电机的额定值有哪些? 6.常见的机器人外部传感器有哪些? 7.简述脉冲回波式超声波传感器的工作原理。 8.机器人视觉的硬件系统由哪些部分组成? 9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些? 10.请简述模糊控制器的组成及各组成部分的用途。 11.从描述操作命令的角度看,机器人编程语言可分为哪几类? 12.仿人机器人的关键技术有哪些? 1.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2) 机器人运动学;(3) 机器人静力学;(4)机器人动力学;(5)机器人控制技术;(6)机器人传感器;(7)机器人语言。 2.答:目前常用的有如下几种形式:(1)横梁式。(2)立柱式。(3)机座式。(4)屈伸式。 4.答:构成机器人控制系统的基本要素包括: (1) 电动机,(2) 减速器,(3) 驱动电路,(4) 运动特性检测传感器,(5) 控制系统的硬件,(6) 控制系统的软件, 5.答:直流电动机的额定值有以下几项:(1)额定功率,(2)额定电压,(3)额定电流,(4)额定转速, 6.答常见的外部传感器包括 触觉传感器,分为;接触觉传感器、压觉传感器、滑觉传感器和力觉传感器。距离传感器,包括超声波传感器,接近觉传感器,以及视觉传感器、听觉传感器、嗅觉传感器、味觉传感器等。 7.答:在脉冲回波式中,先将超声波用脉冲调制后发射,根据经被测物体反射回来的回波延迟时间Δt,计算出被测物体的距离R,假设空气中的声速为v,则被测物与传感器间的距离R为: /2Rvt 如果空气温度为T(℃),则声速v可由下式求得:
331.50.607m/svT
8.答:(1) 景物和距离传感器,常用的有摄像机、CCD图像传感器、超声波传感器和结构光设备等;(2) 视频信号数字化设备,其任务是把摄像机或者CCD输出的信号转换成方便计算和分析的数字信号;(3) 2
视频信号处理器,视频信号实时、快速、并行算法的硬件实现设备:如DSP系统;(4) 计算机及其设备,根据系统的需要可以选用不同的计算机及其外设来满足机器人视觉信息处理及其机器人控制的需要;(5) 机器人或机械手及其控制器。 9.答:预处理的主要目的是清楚原始图像中各种噪声等无用的信息,改进图像的质量,增强兴趣的有用信息的可检测性。从而使得后面的分割、特征抽取和识别处理得以简化,并提高其可靠性。机器视觉常用的预处理包括去噪、灰度变换和锐化等。 10.答:模糊逻辑控制器由4个基本部分组成,即模糊化、知识库、推理算法和逆模糊化。(1) 模糊化:将检测输入变量值变换成相应的论域,将输入数据转换成合适的语言值。(2) 知识库:包含应用领域的知识和控制目标,它由数据和模糊语言控制规则组成。(3) 推理算法:从一些模糊前提条件推导出某一结论,这种结论可能存在模糊和确定两种情况。(4) 逆模糊化:将推理所得到的模糊值转换为明确的控制讯号,作为系统的输入值。 11.答:机器人编程语言可分为:(1) 动作级:以机器人末端执行器的动作为中心来描述各种操作,要在程序中说明每个动作。(2) 对象级:允许较粗略地描述操作对象的动作、操作对象之间的关系等,特别适用于组装作业。(3) 任务级:只要直接指定操作内容就可以了,为此,机器人必须一边思考一边工作。 12.答:(1) 仿人机器人的机构设计;(2) 仿人机器人的运动操作控制,包括实时行走控制、手部操作的最优姿态控制、自身碰撞监测、三维动态仿真、运动规划和轨迹跟踪;(3) 仿人机器人的整体动力学及运动学建模;(4) 仿人机器人控制系统体系结构的研究;(5) 仿人机器人的人机交互研究,包括视觉、语音及情感等方面的交互;(6) 动态行为分析和多传感器信息融合。 三、论述题: 1.试论述机器人技术的发展趋势。 2.试论述精度、重复精度与分辨率之间的关系。 3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。 4.试论述机器人静力学、动力学、运动学的关系。 5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的? 6.试论述工业机器人的应用准则。 1.答:(1) 工业机器人操作机结构的优化设计技术。(2) 机器人控制技术。控制系统,人机界面更加(3) 多传感系统。(4) 机器人遥控及监控技术,机器人半自主和自主技术。(5) 虚拟机器人技术。(6) 多智能体控制技术。(7) 微型和微小机器人技术。(8) 软机器人技术。(9) 仿人和仿生技术。 2.答:精度、重复精度和分辨率用来定义机器人手部的定位能力。 精度是一个位置量相对于其参照系的绝对度量,指机器人手部实际到达位置与所需要到达的理想位置之间的差距。机器人的精度决定于机械精度与电气精度。 重复精度指在相同的运动位置命令下,机器人连续若干次运动轨迹之间的误差度量。 分辨率是指机器人每根轴能够实现的最小移动距离或最小转动角度。精度和分辨率不一定相关。工业机器人的精度、重复精度和分辨率要求是根据其使用要求确定的。机器人本身所能达到的精度取决于机器人结构的刚度、运动速度控制和驱动方式、定位和缓冲等因素。 由于机器人有转动关节,不同回转半径时其直线分辨率是变化的,因此造成了机器人的精度难以确定。由于精度一般较难测定,通常工业机器人只给出重复精度。 3.答:轮式行走机器人是机器人中应用最多的一种机器人,在相对平坦的地面上,用车轮移动方式行走是相当优越的。车轮的形状或结构形式取决于地面的性质和车辆的承载能力。在轨道上运行的多采用实心钢轮,室外路面行驶的采用充气轮胎,室内平坦地面上的可采用实心轮胎。足式行走对崎岖路面具有很好的适应能力,足式运动方式的立足点是离散的点,可以在可能到达的地面上选择最优的支撑点,而轮式行走工具必须面临最坏的地形上的几乎所有点;足式运动方式还具有主动隔震能力,尽管地面高低不平,机身的运动仍然可以相当平稳;足式行走在不平地面和松软地面上的运动速度较高,能耗较少。 4.答:静力学指在机器人的手爪接触环境时,在静止状态下处理手爪力F与驱动力τ的关系。动力学研究机器人各关节变量对时间的一阶导数、二阶导数与各执行器驱动力或力矩之间的关系,即机器人机械系统的运动方程。在考虑控制时,就要考虑在机器人的动作中,关节驱动力τ会产生怎样的关节位置θ、关节速度θ、关节加速度θ,处理这种关系称为动力学(dynamics)。对于动力学来说,除了与连杆长度有关之外,还与各连杆的质量,绕质量中心的惯性矩,连杆的质量中心与关节轴的距离有关。 运动学、静力学和动力学中各变量的关系如下图所示。图中用虚线表示的关系可通过实线关系的组合表示, 3
这些也可作为动力学的问题来处理。 5.答:二阶系统的特性取决于它的无阻尼自然频率ωn和阻尼比ξ。为了安全起见,我们希望系统具有临界阻尼或过阻尼,即要求系统的阻尼比ξ≥1(注意,系统的位置反馈增益kp>0表示负反馈)。把由二阶系统特征方程标准形式所求得的ωn代入可得:
aeffabavapeffa12RfkkkkξkkJR
因而速度反馈增益k v为: apeffaaeffabva
2kkJRRfkkkk
取方程等号时,系统为临界阻尼系统;取不等号时,为过阻尼系统。 在确定位置反馈增益k p时,必须考虑操作臂的结构刚性和共振频率,它与操作臂的结构、尺寸、质量分布和制造装配质量有关。
为了不至于激起结构的振盈和系统的共振,Paul于1981年建议:闭环系统无阻尼自然频率ωn必须限制在关节结构共振频率的一半之内,即:
nr0.5ωω 根据这一要求来调整反馈增益kp,可以求出:
200apa
04ωJRkk
k p求出后,相应的速度反馈增益k v可求得: a00effaeffabva
RωJJRfkkkk
6.答:设计和应用工业机器人时,应全面考虑和均衡机器人的通用性、环境的适应性、耐久性、可靠性和经济性等因素,具体遵循的准则如下。 (1)从恶劣工种开始采用机器人 (2)在生产率和生产质量落后的部门应用机器人 (3)要估计长远需要 (4)机器人的投入和使用成本 (5)应用机器人时需要人