阈值(yuzhi)
- 格式:docx
- 大小:19.88 KB
- 文档页数:2
stata 阈值法标准化阈值法(Thresholding)是一种常用的图像分割方法,其基本原理是将图像根据灰度值的高低划分成多个区域,以达到将前景物体和背景分离的目的。
本文将介绍Stata软件中的阈值法以及相关的标准化方法。
一、Stata中的阈值法实现Stata是一种功能强大的统计软件,可用于进行数据的处理和分析。
Stata中有多种实现阈值法的方法,其中一个常用的方法是利用图像的直方图(Histogram)进行分析。
具体步骤如下:1. 导入图像数据:首先,需要将图像数据导入Stata软件中。
可以使用Stata提供的图像读取函数,比如"import bmp"等命令,将图像数据导入到Stata中,并保存为矩阵形式。
2. 绘制直方图:利用Stata的直方图函数(histogram)对图像进行分析。
直方图是一种统计图形,用于表示数据的分布情况。
在阈值法中,直方图可以用于分析图像的灰度值分布情况,从而确定合适的阈值。
3. 确定阈值:根据直方图的形状,可以通过观察直方图的峰值、波谷等特征来确定合适的阈值。
阈值的选择对分割结果有重要影响,因此需要仔细选择合适的阈值。
4. 进行二值化处理:根据确定的阈值,将图像进行二值化处理,即根据阈值将图像的像素值分为两个类别,一类为前景物体,一类为背景。
可以使用Stata提供的像素处理函数,如"replace"等命令,将图像中小于阈值的像素值设为0,大于阈值的像素值设为255,从而实现图像的二值化。
二、阈值法的标准化方法阈值的选择对阈值法的分割效果有重要影响,因此需要对阈值进行标准化,以便在不同图像上得到一致的分割效果。
常用的阈值标准化方法有以下几种:1. 比例阈值法(Proportional Thresholding):比例阈值法是将图像的像素值根据其灰度级别与灰度级别的最大值之比进行计算,从而得到标准化的阈值。
该方法将最大灰度级别设置为1,然后将图像中的每个像素值除以最大灰度级别,得到的比例即为标准化的阈值。
机器视觉中的对比阈值一、引言在机器视觉领域,对比阈值是一种常用的图像处理技术,用于从背景中分离出目标对象。
通过设定一个或多个阈值,可以将图像的像素值分为不同的类别,从而实现目标与背景的区分。
本文将对机器视觉中的对比阈值进行详细介绍,包括其原理、应用场景以及优化策略等方面。
二、对比阈值的原理对比阈值处理是一种基于图像灰度值的分割方法。
在数字图像处理中,灰度值表示像素的亮度水平,范围通常从0(黑色)到255(白色)。
对比阈值处理通过设置一个或多个阈值,将图像的灰度值分为两个或多个区间,每个区间代表不同的对象或背景。
对比阈值的选取是关键步骤,它直接影响到分割效果的好坏。
常用的阈值选取方法有全局阈值法、局部阈值法和自适应阈值法等。
全局阈值法根据整个图像的灰度直方图选择一个固定的阈值;局部阈值法则将图像划分为若干个子区域,每个子区域分别计算阈值;自适应阈值法则根据图像的局部特征动态调整阈值。
三、对比阈值的应用场景1. 工业检测:在工业自动化生产线上,机器视觉系统广泛应用于产品质量检测。
通过对比阈值处理,可以快速准确地识别出产品表面的缺陷、污渍等问题,从而提高生产效率和产品质量。
2. 医学影像分析:在医学影像领域,对比阈值处理有助于从复杂的图像背景中提取出感兴趣的区域(如肿瘤、血管等),为医生的诊断和治疗提供有力支持。
3. 安全监控:在安防领域,对比阈值处理可以帮助监控系统从海量视频数据中快速检测出异常事件(如入侵、火灾等),提高安全管理的效率。
4. 无人驾驶:在无人驾驶汽车中,机器视觉系统需要实时识别道路标志、行人、车辆等目标。
通过对比阈值处理,可以有效地将这些目标与背景区分开来,为自动驾驶提供可靠的环境感知信息。
四、对比阈值的优化策略1. 阈值选取方法的改进:针对不同类型的图像和应用场景,可以选择合适的阈值选取方法。
例如,对于光照不均的图像,可以采用局部阈值法或自适应阈值法来提高分割效果。
2. 预处理和后处理技术的结合:在进行对比阈值处理之前或之后,可以采用一些预处理和后处理技术来改善分割效果。
阈值法在图像分割技术中的应用newmaker图像的研究和应用中,人们往往仅对图像中的某些部分感兴趣,这些部分称为目标或前景(其他部分称为背景),他们一般对应图像中特定的、具有独特性质的区域。
为了辨识和分析目标,需要将他们分离提取出来,在此基础上才有可能对目标进一步利用。
图像分割就是指把图像分成格局特性的区域并提取出感兴趣目标的技术和过程。
这里特性可以是象素的灰度、颜色、纹理等,预先定义的目标可以对应单个区域,也可以对应多个区域。
现有的图像分割算法有:阈值分割、边缘检测和区域提取法。
本文着重研究基于阈值法的图像分割技术。
1 阈值法图像分割1.1 阈值法的基本原理阈值分割法是一种基于区域的图像分割技术,其基本原理是:通过设定不同的特征阈值,把图像象素点分为若干类。
常用的特征包括:直接来自原始图像的灰度或彩色特征;由原始灰度或彩色值变换得到的特征。
设原始图像为f(x ,y),按照一定的准则f(x ,y)中找到特征值T ,将图像分割为两个部分,分割后的图像为:若取:b0=0(黑),b1=1(白),即为我们通常所说的图像二值化。
1.2 阈值法图像分割方法分类全局阈值法指利用全局信息对整幅图像求出最优分割阈值,可以是单阈值,也可以是多阈值;局部阈值法是把原始的整幅图像分为几个小的子图像,再对每个子图像应用全局阈值法分别求出最优分割阈值。
其中全局阈值法又可分为基于点的阈值法和基于区域的阈值法。
阈值分割法的结果很大程度上依赖于阈值的选择,因此该方法的关键是如何选择合适的阈值。
由于局部阈值法中仍要用到全局阈值法,因此本文主要对全局阈值法中基于点的阈值法和基于区域的阈值法分别进行了研究。
根据阈值法的原理可以将阈值选取技术分为3大类(1)基于点的全局阈值方法基于点的全局阈值算法与其他几大类方法相比,算法时间复杂度较低,易于实现,适合应用于在线实时图像处理系统。
(2)基于区域的全局阈值方法对一幅图像而言,不同的区域,比如说目标区域或背景区域,同一区域内的象素,在位置和灰度级上同时具有较强的一致性和相关性。
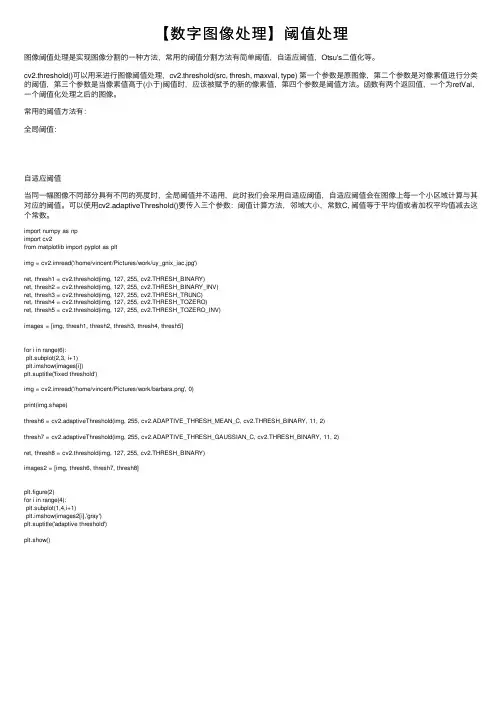
【数字图像处理】阈值处理图像阈值处理是实现图像分割的⼀种⽅法,常⽤的阈值分割⽅法有简单阈值,⾃适应阈值,Otsu's⼆值化等。
cv2.threshold()可以⽤来进⾏图像阈值处理,cv2.threshold(src, thresh, maxval, type) 第⼀个参数是原图像,第⼆个参数是对像素值进⾏分类的阈值,第三个参数是当像素值⾼于(⼩于)阈值时,应该被赋予的新的像素值,第四个参数是阈值⽅法。
函数有两个返回值,⼀个为retVal,⼀个阈值化处理之后的图像。
常⽤的阈值⽅法有:全局阈值:⾃适应阈值当同⼀幅图像不同部分具有不同的亮度时,全局阈值并不适⽤,此时我们会采⽤⾃适应阈值,⾃适应阈值会在图像上每⼀个⼩区域计算与其对应的阈值。
可以使⽤cv2.adaptiveThreshold()要传⼊三个参数:阈值计算⽅法,邻域⼤⼩,常数C, 阈值等于平均值或者加权平均值减去这个常数。
import numpy as npimport cv2from matplotlib import pyplot as pltimg = cv2.imread('/home/vincent/Pictures/work/uy_gnix_iac.jpg')ret, thresh1 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)ret, thresh2 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY_INV)ret, thresh3 = cv2.threshold(img, 127, 255, cv2.THRESH_TRUNC)ret, thresh4 = cv2.threshold(img, 127, 255, cv2.THRESH_TOZERO)ret, thresh5 = cv2.threshold(img, 127, 255, cv2.THRESH_TOZERO_INV)images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]for i in range(6):plt.subplot(2,3, i+1)plt.imshow(images[i])plt.suptitle('fixed threshold')img = cv2.imread('/home/vincent/Pictures/work/barbara.png', 0)print(img.shape)thresh6 = cv2.adaptiveThreshold(img, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)thresh7 = cv2.adaptiveThreshold(img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2)ret, thresh8 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)images2 = [img, thresh6, thresh7, thresh8]plt.figure(2)for i in range(4):plt.subplot(1,4,i+1)plt.imshow(images2[i],'gray')plt.suptitle('adaptive threshold')plt.show()。
otsu阈值Otsu阈值图像处理中,阈值分割技术是一种比较简单而且有效的方法,用于将图像分为不同的物体或背景等部分,而Otsu阈值则是其中一种非常优秀的阈值分割方法。
本文将会介绍Otsu阈值的原理、方法以及应用。
原理Otsu阈值是基于图像的灰度值来确定阈值的。
其原理是利用方差作为判断依据。
在Otsu阈值算法中,将整个灰度级别划分为两部分:一个是高于某个阈值的像素,另一个是低于该阈值的像素。
计算两部分的方差,然后把两部分的方差加起来,得到一个总体方差。
通过改变分割的阈值,可以得到许多不同的总体方差值,最终选择方差最小的那个点作为最佳分割点。
方法Otsu阈值的计算步骤如下:1. 首先,统计图像中每个像素灰度级的出现次数,构建灰度级直方图。
将直方图归一化,使得表示灰度分布的概率分布和最终分割结果都在0到1之间。
2. 然后,计算每个像素灰度级的累积分布函数(CDF),并将其归一化。
CDP是指图像中低于或等于该灰度值的像素占总像素数的比例。
例如,灰度级为50的像素的CDF是所有灰度值小于或等于50的像素数目除以总像素数。
3. 接下来,计算每个像素灰度值的均值,或者说期望值。
4. 然后,计算总体方差。
如果将所有像素分成高于和低于某个阈值的两部分,则总方差可以用这两部分的方差加起来来求得。
5. 最后,选择能够使总方差最小的阈值作为最终的分割阈值。
应用Otsu阈值分割方法在图像二值化中应用广泛,尤其是在图像分割,目标检测和图像识别中。
在Otsu阈值分割中可以得到二值图像,即黑白图像。
在OCR识别、人脸识别、指纹识别等多个领域中,Otsu阈值分割都有着广泛的应用。
总结Otsu阈值是一种非常有效的阈值分割方法,其原理简单,易于操作,适用于大多数图像处理领域。
通过计算整幅图像的方差来确定阈值,使得分割结果达到最佳的效果。
在图像处理技术的研究中,Otsu阈值分割将成为一种不可或缺的技术。

亮的像素转换为白色;而所有比阈值暗的像素转换为黑色。
“阈值”命令对确定图像的最亮和最暗区域很有用。
3、地震工程中,强震持续时间可定义为超过一定加速度阈值(一般为0.05g)的第一个峰点和最后一个峰点之间的时间段。
PS阈值:
阈值就是临界值,在PS中的阈值,实际上是基于图片亮度的一个黑白分界值,默认值是50%中性灰,既128,亮度高于128(<50%的灰)白既会变白,低于128(>50%的灰)的既会变黑.[可以跟滤镜中的其它――高反差保留,再用阈值效果会更好.]
当输入信号低于门限时,增益就会按一定的压缩比例放大或缩小
扩展阅读:
1
/question/7035382.html
开放分类:
系统,图像处理,术语,物理化学,应用数学
我来完善“阈值”相关词条:
吸光度阈电位阙值。